

Stability Study of Time Lag Disturbance in an Automatic Tractor Steering System Based on Sliding Mode Predictive Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
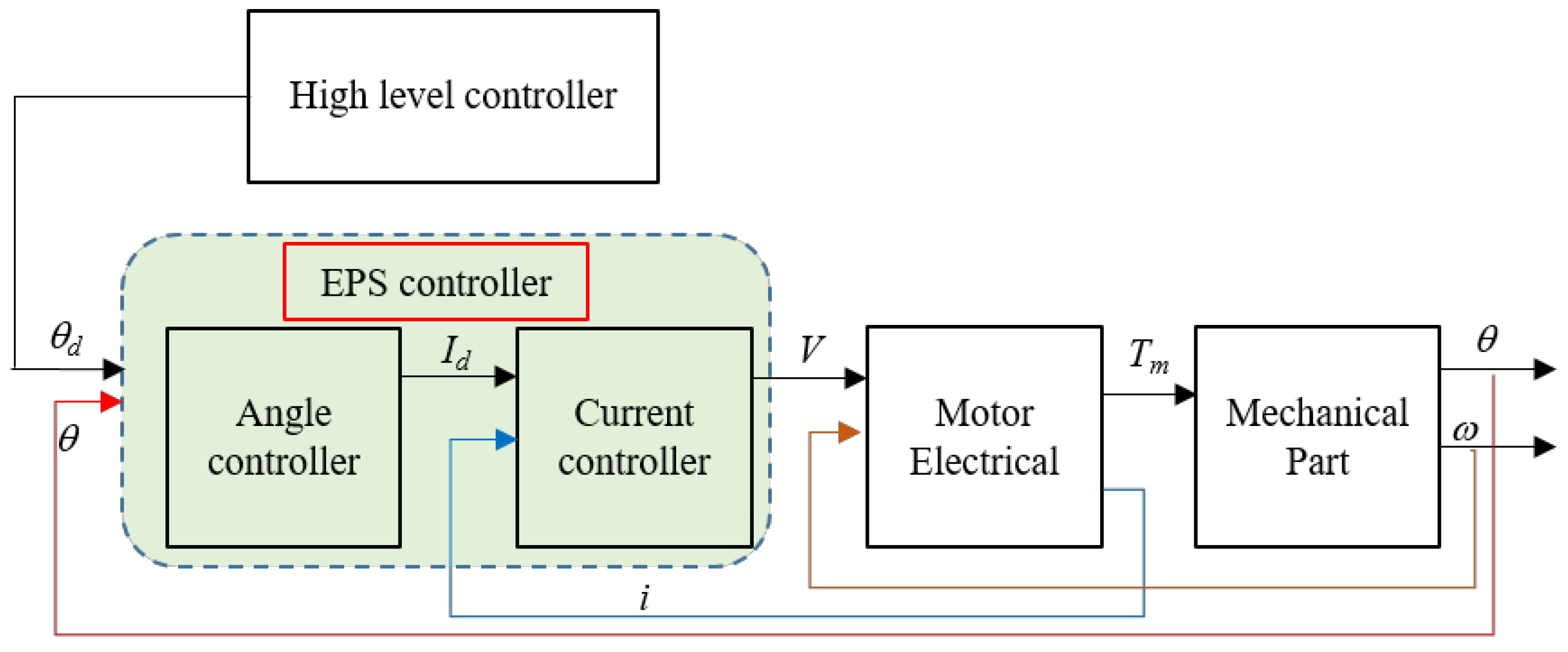
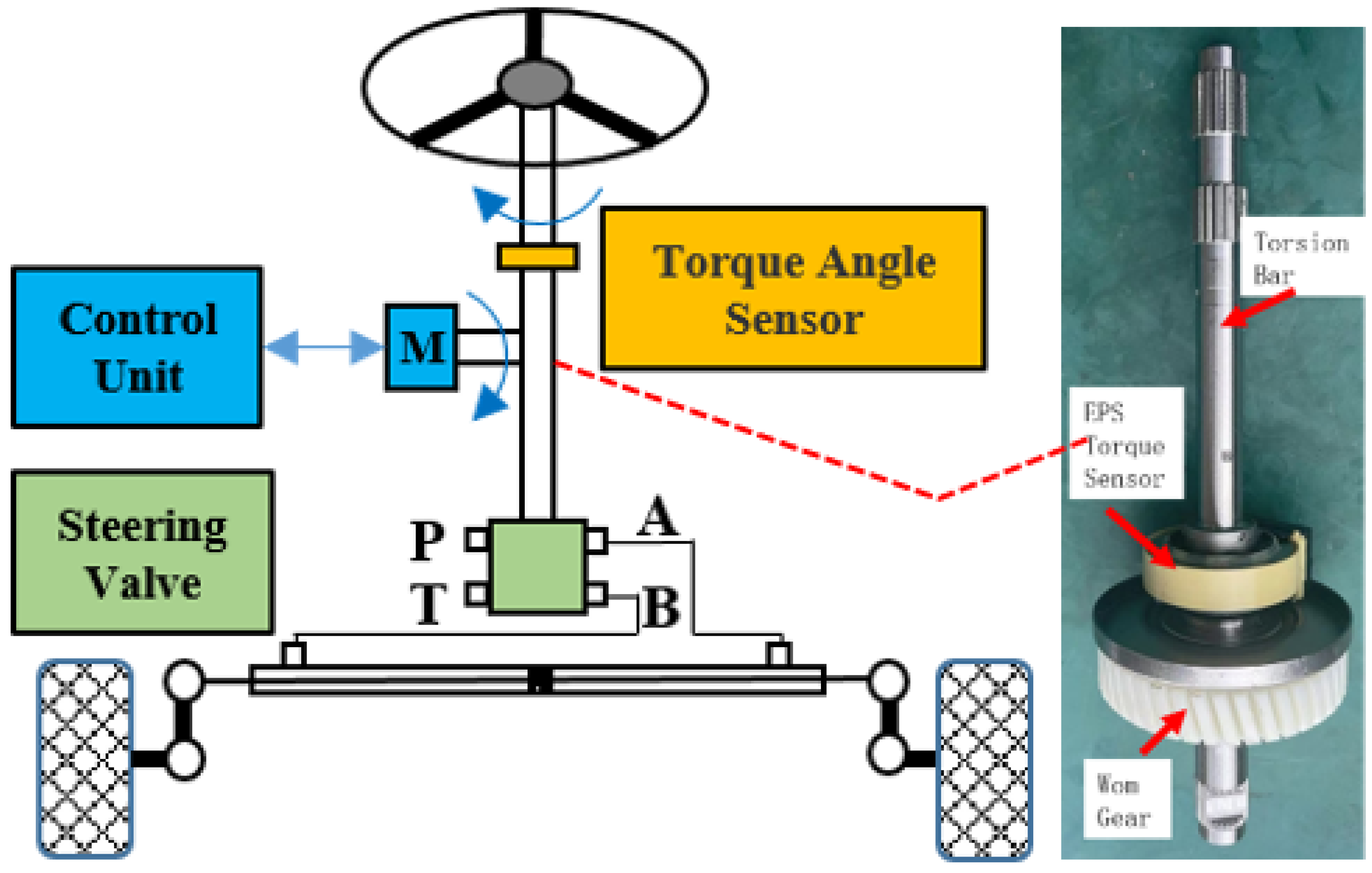
2.1. EHCPS System Modeling
Controller Modeling
2.2. Design of Discrete SMC Controllers
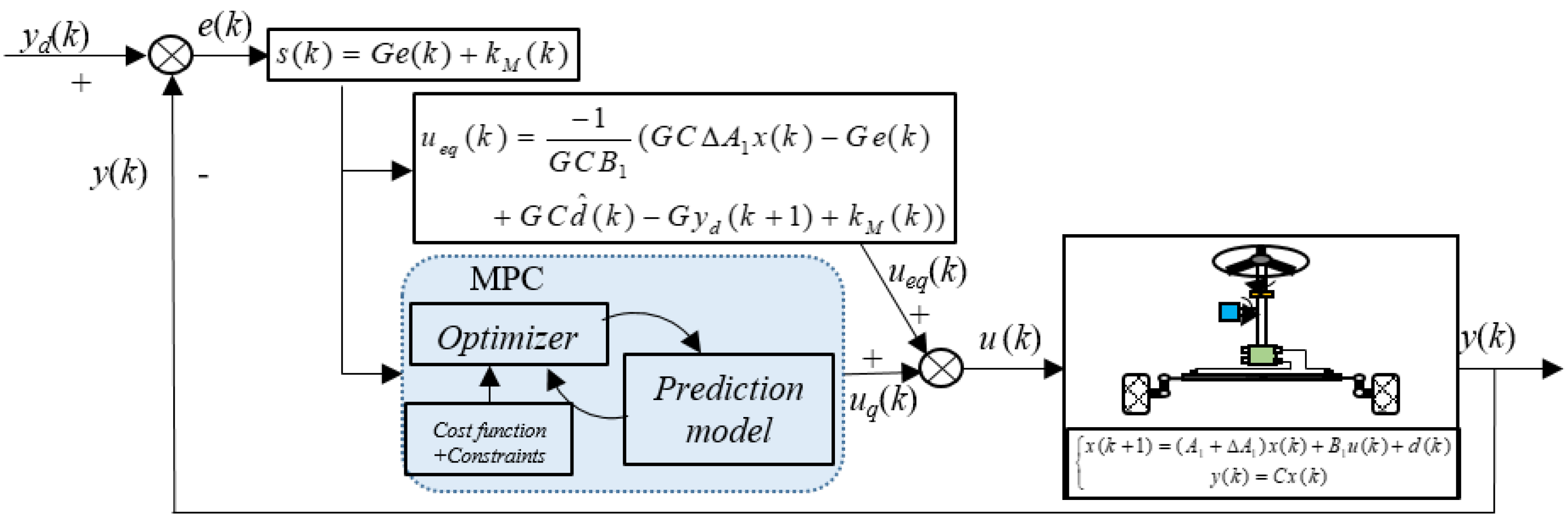
2.3. SMPC Controller Design
2.3.1. Controller Design
2.3.2. Optimal Solution
2.3.3. Design of Constraints
2.4. SMPC-Based Steering System Stability Analysis
2.5. Validation of Simulation Results
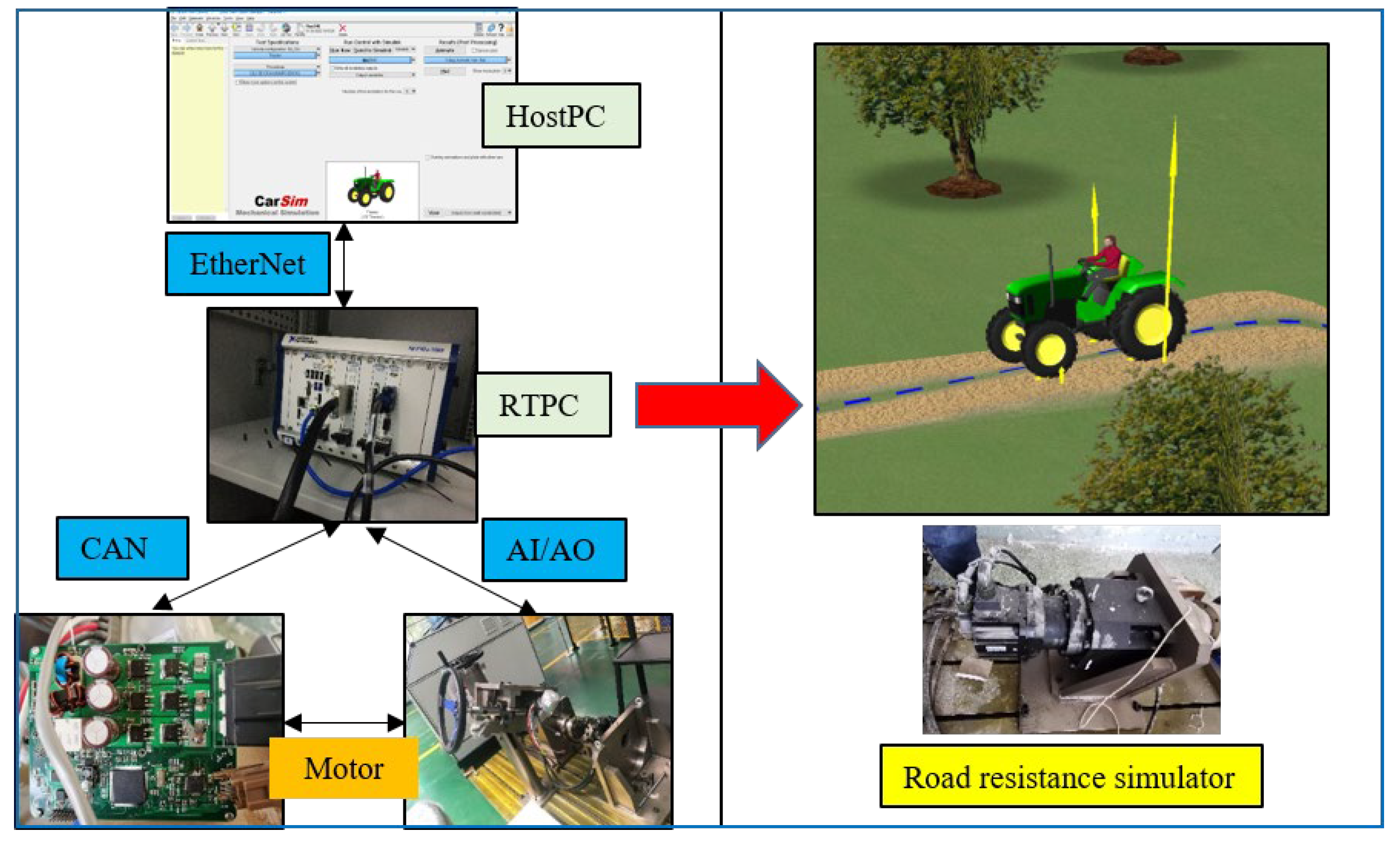
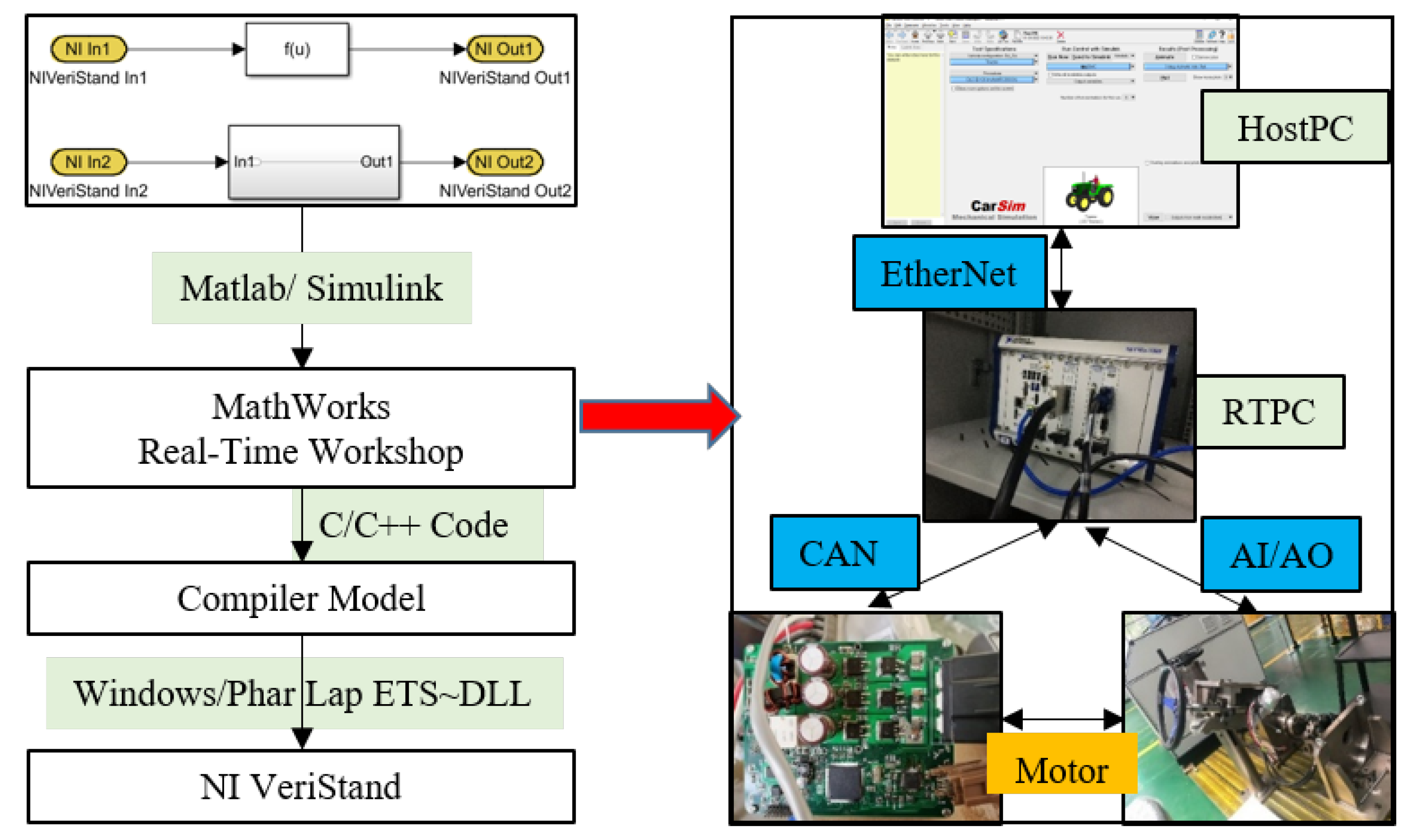
2.6. Test Verification
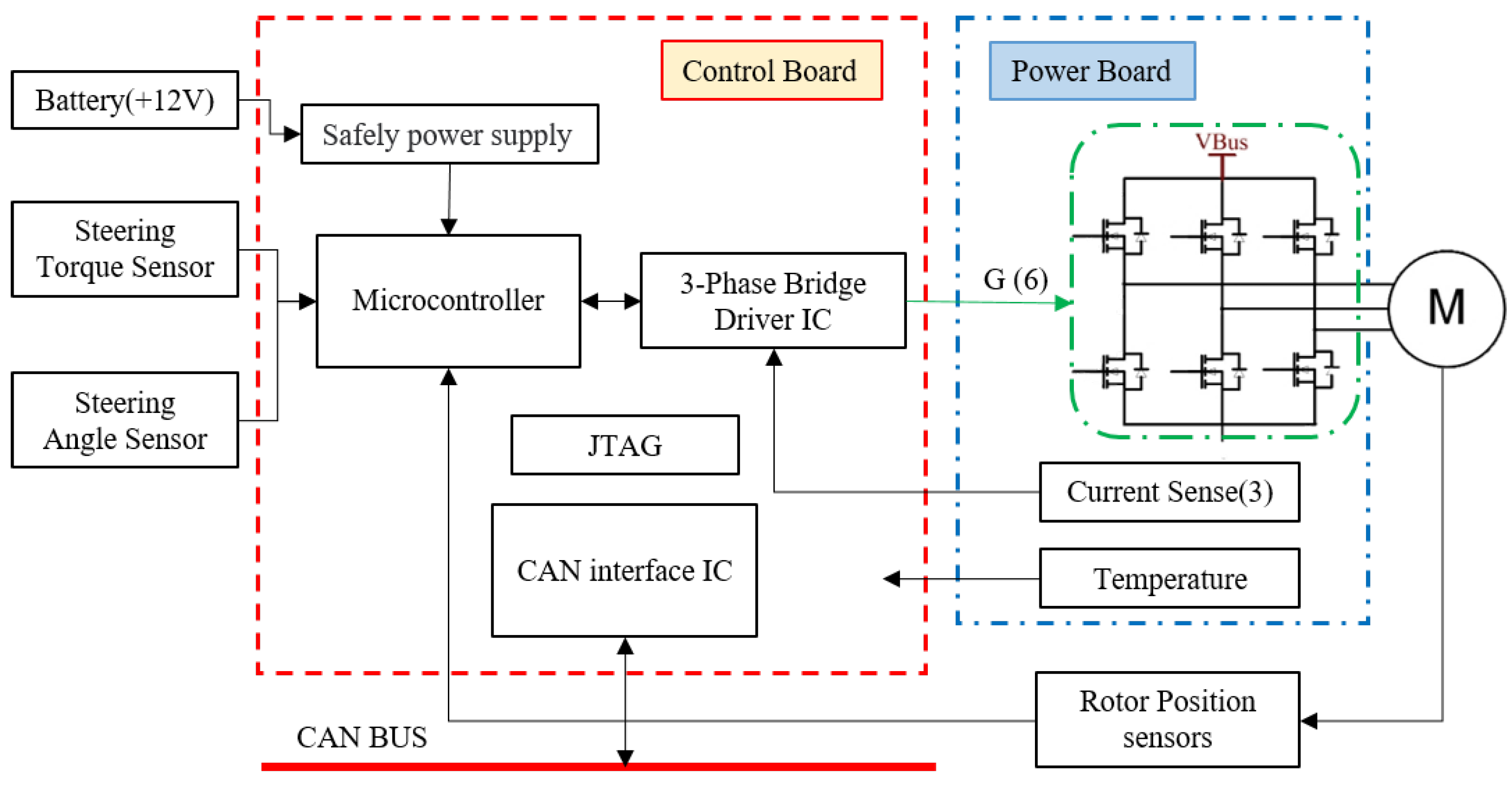
Introduction to Test Benches
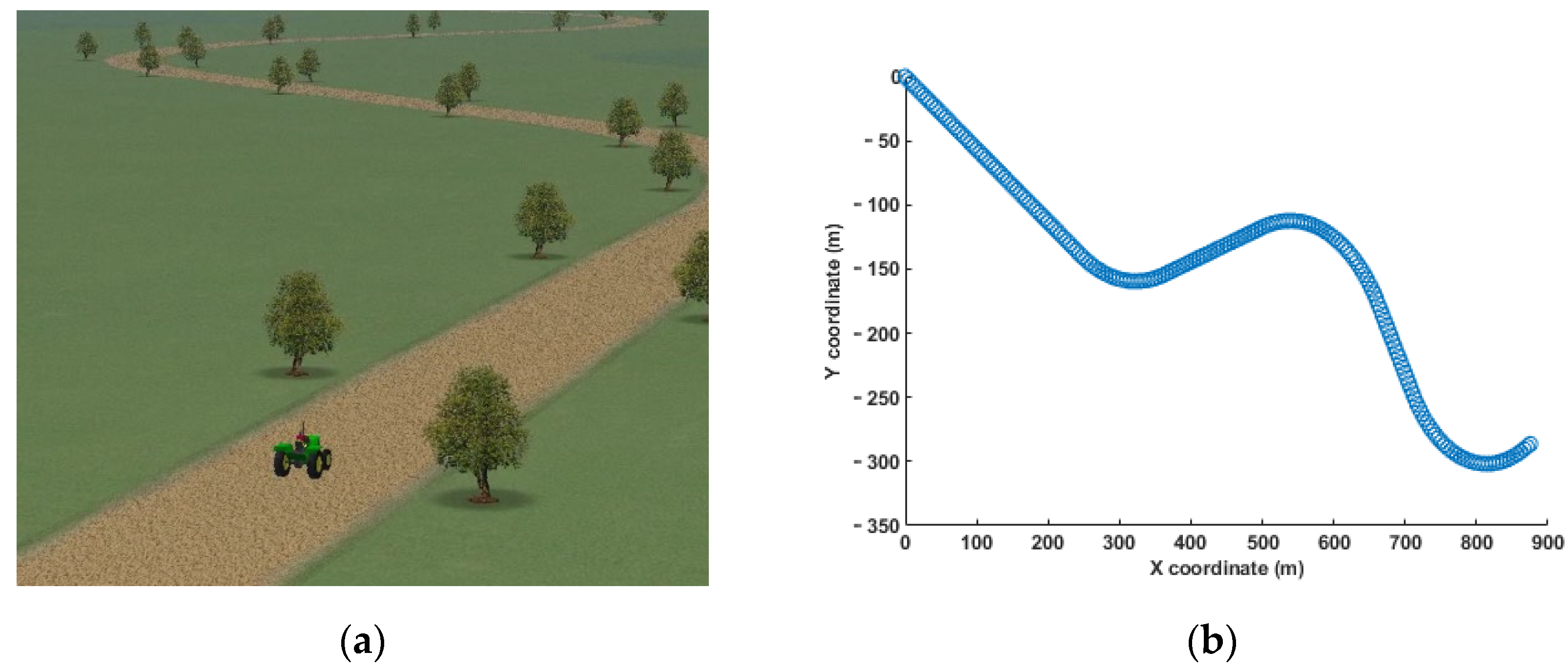
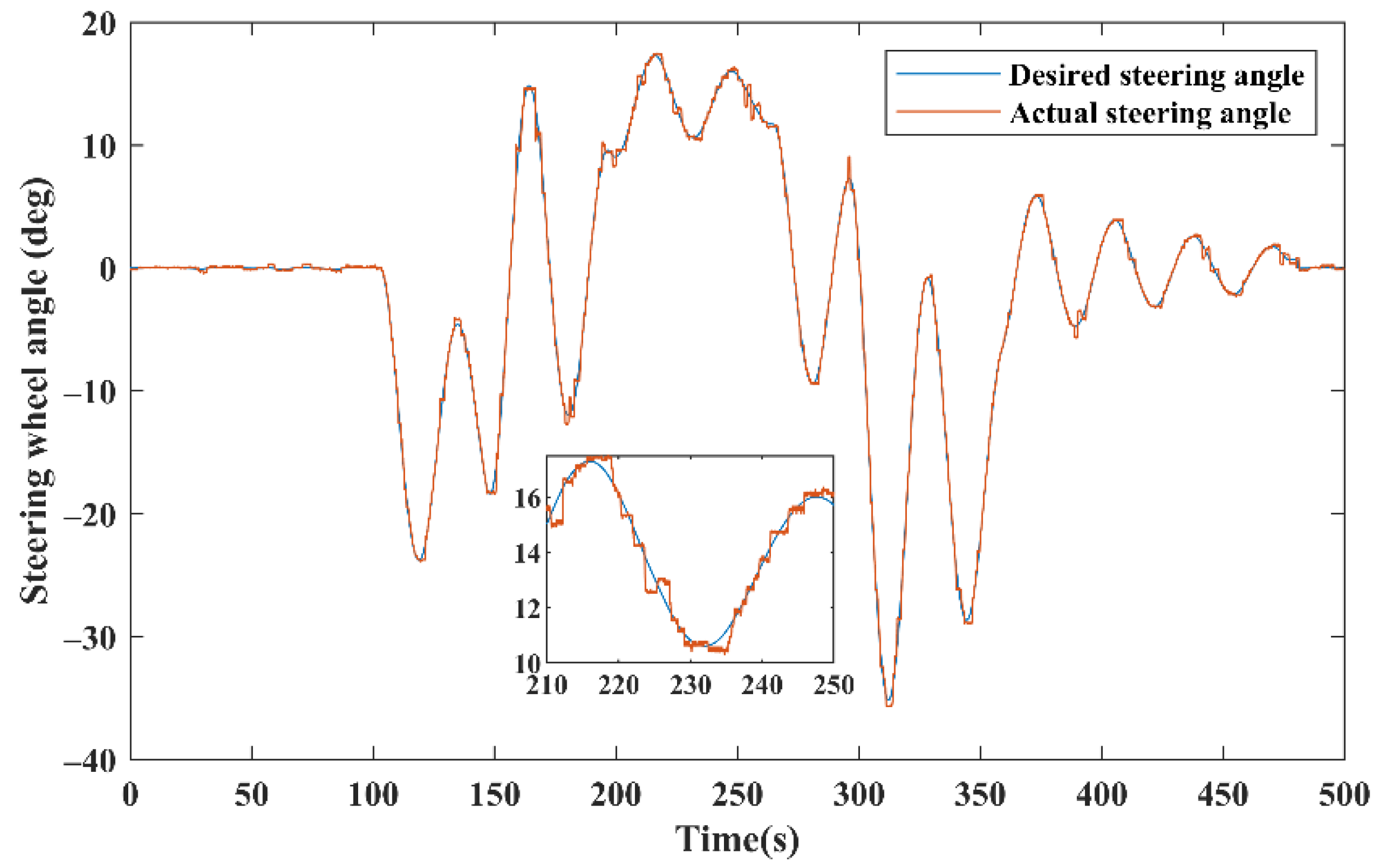
3. Results and Discussion
Analysis and Discussion of Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abroshan, M.; Taiebat, M.; Goodarzi, A. Automatic steering control in tractor semi-trailer vehicles for low-speed maneuverability enhancement. Proc. Inst. Mech. Eng. 2016, 231, 83–102. [Google Scholar] [CrossRef]
- Liu, J.Y.; Tan, J.Q.; Mao, E.R. Proportional directional valve based automatic steering system for tractors. Front. Inf. Technol. Electron. Eng. 2016, 17, 458–464. [Google Scholar] [CrossRef]
- Huynh, V.; Smith, R.; Kwok, N.M.; Katupitiya, J. Anonlinear PI and back stepping-based controller for tractor-steerable trailers influenced by slip. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 245–252. [Google Scholar]
- Fang, H. Automatic Guidance of Farm Vehicles in Presence of Sliding Effects; Universite Blaise Pascal: Aubière, France, 2004. [Google Scholar]
- Javad, T.; Xu, W.; Stanley, L.; Jay, K. A sliding mode controller with a nonlinear disturbance observer for a farm vehicle operating in the presence of wheel slip. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013. [Google Scholar]
- Massera, F.C.; Wolf, D.F. Driver assistance controller for tire saturation avoidance up to the limits of handling. In Proceedings of the 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlandia, Brazil, 29–31 October 2015. [Google Scholar]
- Meiling, W.; Zhen, W.; Yi, Y.; Mengyin, F. Model predictive control for ugv trajectory tracking based on dynamic model. In Proceedings of the 2016 IEEE International Conference on Information and Automation, Ningbo, China, 1–3 August 2016. [Google Scholar]
- Keviczkv, T.; Falcone, P.; Borrelli, E. Predictive control approach to autonomous vehicle steering. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Wang, G.D.; Liu, L.; Qing, G. Integrated Path tracking control of steering and braking based on holistic MPC. IFAC Pap. Line 2021, 54, 45–50. [Google Scholar] [CrossRef]
- Huang, X.Y. Robust weighted gain-scheduling H∞ vehicle lateral motion control with considerations of steering system backlash-type hysteresis. IEEE Trans. Control Syst. Technol. 2014, 22, 1740–1753. [Google Scholar] [CrossRef]
- Zhao, J.M.; Jie, M.; Zhang, L.J. Passivity-based sliding mode predictive control of discrete-time singular systems with time-varying delay. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks, Xianning, China, 16–18 April 2011. [Google Scholar]
- Kim, S.H.; Shin, M.C.; Chu, C.N. Development of EHPS motor speed map using HILS system. IEEE Trans. Veh. Technol. 2013, 62, 1553–1567. [Google Scholar] [CrossRef]
- Miao, H.Q.; Diao, P.S.; Xu, G.F. Research on decoupling control for the longitudinal and lateral dynamics of a tractor considering steering delay. Sci. Rep. 2022, 12, 1–23. [Google Scholar] [CrossRef]
- Dannöhl, C.; Müller, S.; Ulbrich, H. H∞-control of a rack-assisted electric power steering system. Veh. Syst. Dyn. 2012, 50, 527–544. [Google Scholar] [CrossRef]
- Zhao, W.Z.; Zhou, X.C.; Wang, C.Y. Energy analysis and optimization design of vehicle electro-hydraulic compound steering system. Appl. Energy 2019, 255, 113713. [Google Scholar] [CrossRef]
- Sharp, R.S.; Granger, R. On car steering torques at parking speeds. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2003, 217, 87–96. [Google Scholar] [CrossRef]
- Kim, W.; Son, Y.S.; Chung, C.C. Torque overlay-based robust steering wheel angle control of electrical power steering for a lane-keeping system of automated vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4379–4392. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, J.; Liu, Y.; He, X.K. Adaptive control of PMSM servo system for steering-by-wire system with disturbances observation. IEEE Trans. Transp. Electrif. 2015, 8, 2015–2028. [Google Scholar] [CrossRef]
- Xu, Q.S.; Li, Y.M. Micro-/Nanopositioning using model predictive output integral discrete sliding mode control. IEEE Trans. Ind. Electron. 2012, 59, 1161–1170. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef] [Green Version]
- Furuta, K. Sliding mode control of a discrete system. Syst. Control Lett. 1990, 14, 145–152. [Google Scholar] [CrossRef]
- Hyunsik, N.; Wansik, C.; Changsun, A. Model predictive control for evasive steering of an autonomous vehicle. Int. J. Automot. Technol. 2019, 20, 1033–1042. [Google Scholar]
- Wang, Y.; Hou, M. Model-free adaptive integral terminal sliding mode predictive control for a class of discrete-time nonlinear systems. ISA Trans. 2019, 93, 209–217. [Google Scholar] [CrossRef]
- Bao, C.J.; Feng, J.W.; Wu, J. Model predictive control of steering torque in shared driving of autonomous vehicles. Sci. Prog. 2020, 103, 1–22. [Google Scholar] [CrossRef]
- Shi, G.B.; Zhou, Q.; Wang, S. High robust control strategy for electro-hydraulic hybrid steering system in unmanned mode. Trans. Chin. Soc. Agric. Mach. 2019, 50, 395–402. [Google Scholar]
- Wu, J.; Tian, Y.; Walker, P. Attenuation reference model based adaptive speed control tactic for automatic steering system. Mech. Syst. Signal Process. 2021, 156, 107631. [Google Scholar] [CrossRef]
- Kuhne, F.; Fetter, W. Model predictive control of a mobile robot using linearizaton. Proc. Mechatron. Robot. 2004, 4, 525–530. [Google Scholar]
- Wang, L.P. Model Predictive Control System Design and Implementation Using MATLAB®; Springer: London, UK, 2009; pp. 43–86. [Google Scholar]
- Erkan, K.; Erkan, K.; Herman, R. Distributed nonlinear model predictive control of an autonomous tractor–trailer system. Mechatronics 2014, 24, 926–933. [Google Scholar]
- Yongsoon, E.; Jung, H.K.; Kwangsoo, K. Discrete-time variable structure controller with a decoupled disturbance compensator and its application to a CNC servomechanism. IEEE Trans. Control Syst. Technol. 1999, 7, 414–423. [Google Scholar] [CrossRef]
- Hung, J.Y.; Gao, W.; Hung, J.C. Variable structure control: A survey. IEEE Trans. Ind. Electron. 1993, 40, 2–22. [Google Scholar] [CrossRef] [Green Version]
- Bartoszewicz, A. Discrete-time quasi-sliding mode control strategies. IEEE Trans. Ind. Electron. 1998, 45, 633–637. [Google Scholar] [CrossRef]
- Xie, B.; Wang, S.; Wu, X.H. Design and hardware-in-the-loop test of a coupled drive system for electric tractor. Biosyst. Eng. 2022, 216, 165–185. [Google Scholar] [CrossRef]
- Jeon, C.-W.; Kim, H.-J. An entry-exit path planner for an autonomous tractor in a paddy field. Comput. Electron. Agric. 2021, 191, 106548. [Google Scholar] [CrossRef]
- Rohrer, R.A.; Pitla, S.K.; Luck, J.D. Tractor CAN bus interface tools and application development for real-time data analysis. Comput. Electron. Agric. 2019, 163, 104847. [Google Scholar] [CrossRef]





















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, H.; Diao, P.; Yao, W.; Li, S.; Wang, W. Stability Study of Time Lag Disturbance in an Automatic Tractor Steering System Based on Sliding Mode Predictive Control. Agriculture 2022, 12, 2091. https://doi.org/10.3390/agriculture12122091
Miao H, Diao P, Yao W, Li S, Wang W. Stability Study of Time Lag Disturbance in an Automatic Tractor Steering System Based on Sliding Mode Predictive Control. Agriculture. 2022; 12(12):2091. https://doi.org/10.3390/agriculture12122091
Chicago/Turabian StyleMiao, Hequan, Peisong Diao, Wenyan Yao, Shaochuan Li, and Wenjun Wang. 2022. "Stability Study of Time Lag Disturbance in an Automatic Tractor Steering System Based on Sliding Mode Predictive Control" Agriculture 12, no. 12: 2091. https://doi.org/10.3390/agriculture12122091