

Analysis of HMCVT Shift Quality Based on the Engagement Characteristics of Wet Clutch

Abstract
:1. Introduction
2. Materials and Methods
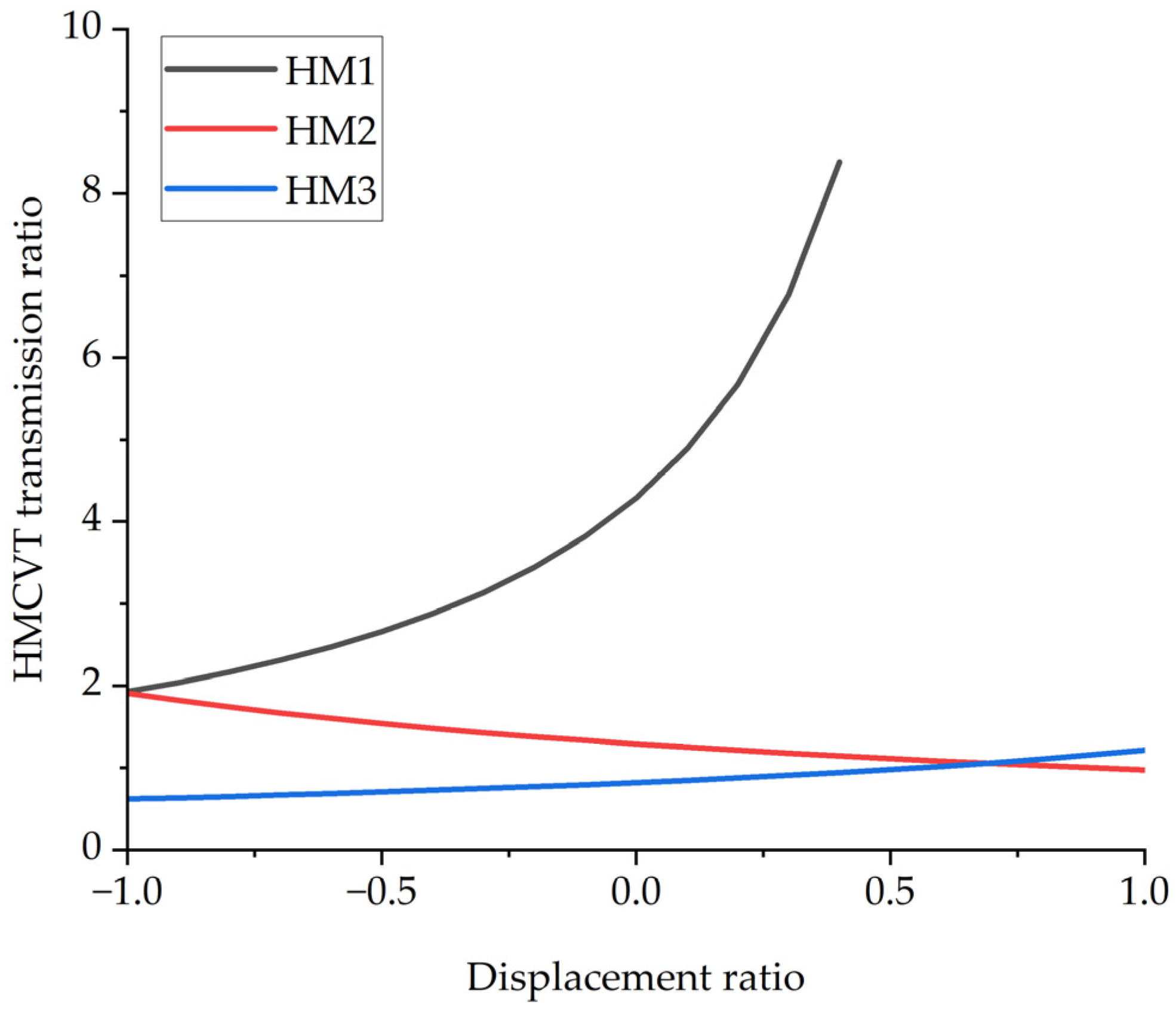
2.1. Three-Stage HMCVT Transmission Principle
- HM1: C1 is engaged, C2 and C3 are separated, and P1, P2, and P3 work simultaneously. The power is output from the gear ring of P3 to C1 and then through the clutch shaft to the output shaft.
- HM2: C2 is engaged, C1 and C3 are separated, P1 and P2 work at the same time, and P3 does not work. The power is output from the sun gear of P2 to C2 and then through the clutch shaft to the output shaft.
- HM3: C3 is engaged, C1 and C2 are separated, P1 works, P2 and P3 do not work, and the power is output from the P1 planet carrier to the C3 and then through the clutch shaft to the output shaft.
2.2. Wet Clutch Engagement Characteristics Test Bench
2.3. Shift Quality Evaluation Index
2.4. HMCVT Shift Quality Simulation Model Based on Simulation X
3. Results and Discussion
3.1. Oil Pressure Variation Characteristics of Wet Clutch
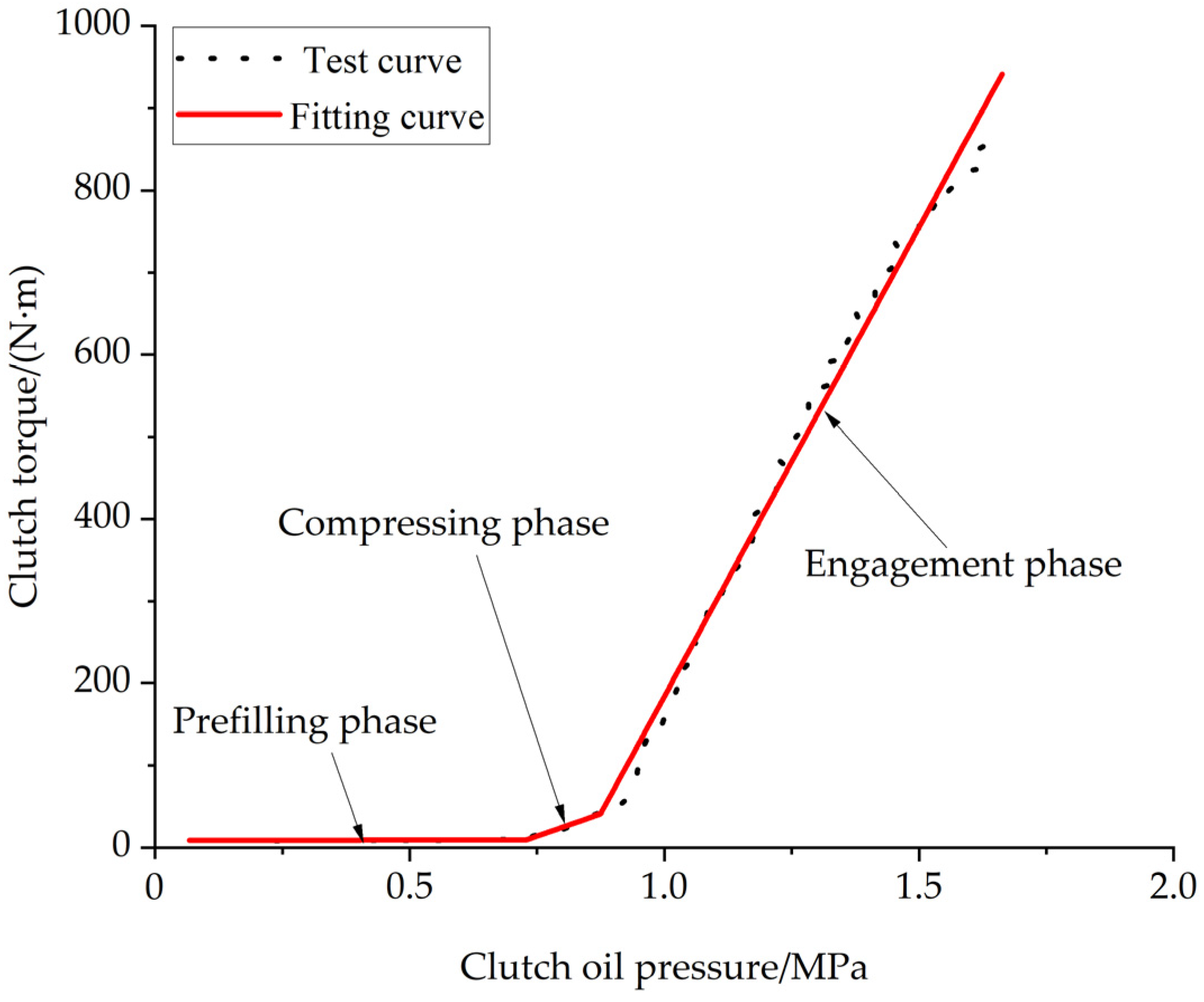
3.2. Dynamic Torque Characteristics of Wet Clutch
3.3. Simulation Analysis of Shift Quality Based on Engagement Characteristics
3.3.1. Speed and Torque of the HMCVT Output Shaft
3.3.2. Shift Quality Analysis
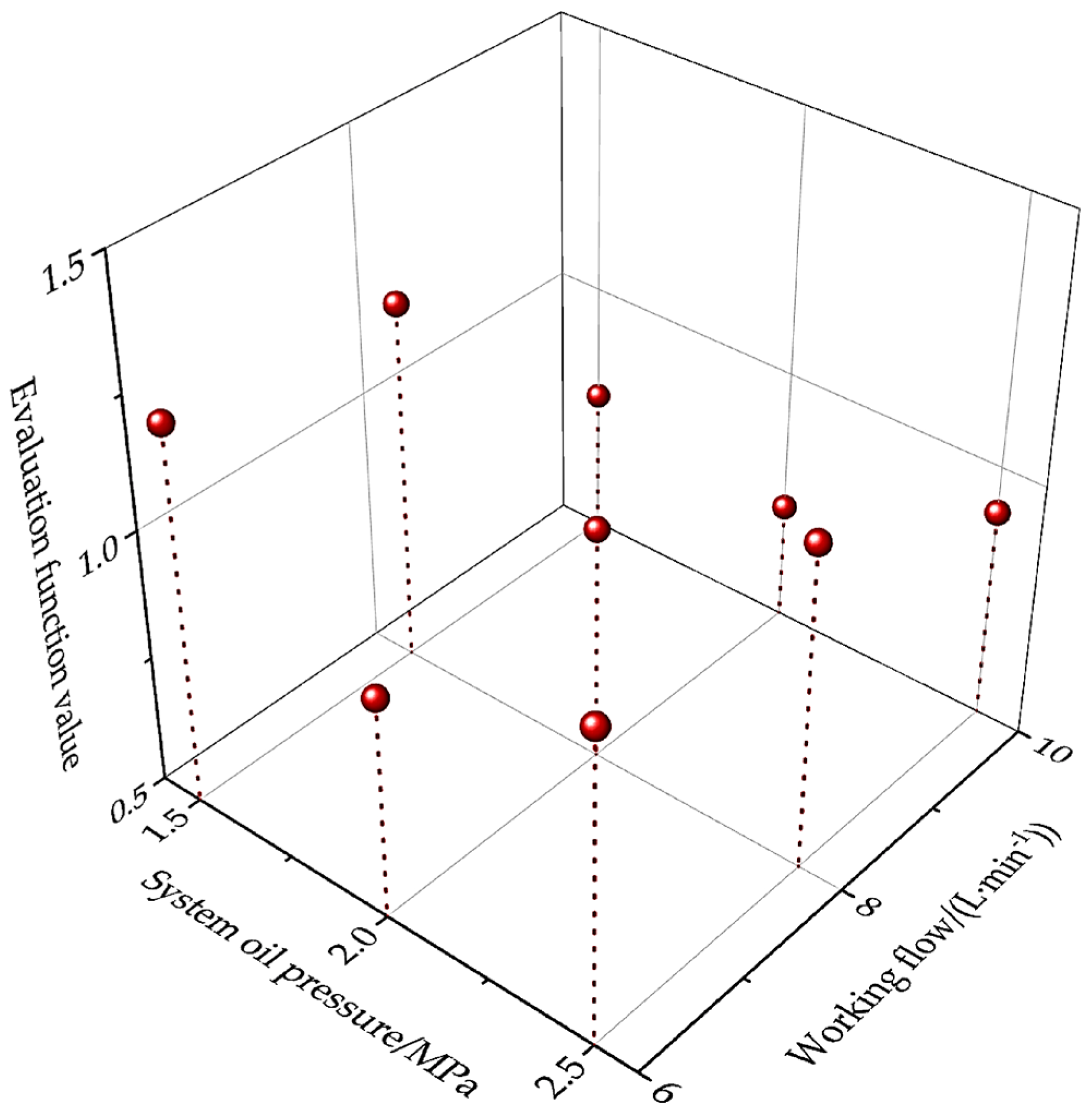
3.3.3. Optimal Combination of Working Flow and System Oil Pressure
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Linares, P.; Méndez, V.; Catalán, H. Design parameters for c ontinuously variable power-split transmissions using planetaries with 3 active shafts. J. Terramech. 2010, 47, 325–335. [Google Scholar] [CrossRef] [Green Version]
- Xie, B.; Wu, Z.B.; Mao, E.R. Development and prospect of key technologies on agricultural tractor. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–17. [Google Scholar]
- Cheng, Z.; Lu, Z.X. Research on Dynamic Load Characteristics of AdvancedVariable Speed Drive System for Agricultural Machineryduring Engagement. Agriculture 2022, 12, 161. [Google Scholar] [CrossRef]
- Gao, X.; Zhu, Z.; Zhu, Y. Analysis of transmission characteristics of HMCVT. J. Chongqing Jiaotong Univ. Nat. Sci. 2013, 32, 712–716. [Google Scholar]
- Zhong, Z.M.; Kong, G.L.; Yu, Z.P.; Kong, G.P. Review on torque interruption and its solution of automated mechanical transmission. J. Tongji Univ. Nat. Sci. 2011, 39, 1850–1855. [Google Scholar]
- Raikwar, S.; Tewari, V.K.; Mukhopadhyay, S.; Verma, C.R.B.; Sreenivasulu Rao, M. Simulation of components of a power shuttle transmission system for an agricultural tractor. Comput. Electron. Agric. 2015, 114, 114–124. [Google Scholar] [CrossRef]
- Zhao, E.H.; Ma, B.; Li, H.Y.; Du, Q.; Li, H.Z.; Ma, C.N. Influence of rotating speed on local lubrication and friction characteristics of wet clutch. Acta Armamentarii 2017, 38, 625–633. [Google Scholar]
- Zhao, E.H.; Ma, B.; Li, H.Y.; Du, Q.; WU, J.P.; Ma, C.N. Effect of non-uniform contact on friction characteristices of wet clutches. J. Jilin Univ. Eng. Technol. Ed. 2018, 48, 661–669. [Google Scholar]
- Ma, B.; Yu, L.; Chen, M.; Li, H.Y.; Zheng, L.J. Numerical and experimental studies on the thermal characteristics of the clutch hydraulic system with provision for oil flow. Ind. Lubr. Tribol. 2019, 71, 733–740. [Google Scholar] [CrossRef]
- Wang, Q.; Ma, B.; Yu, L.; Wang, L.Y.; Li, H.Z.; Chen, X.B. Effect of rotational speed on the friction-wear characteristics of a wet multi-disc clutch during the running-in process. Tribology 2019, in press.
- Ouyang, T.C.; Li, S.Y.; Huang, G.C.; Zhou, F.; Chen, N. Mathematical modeling and performance prediction of a clutch actuator for heavy-duty automatic transmission vehicles. Mech. Mach. Theory 2019, 136, 190–205. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, J.W.; Gao, J.; Yu, H.S.; Liu, D. Clutch pressure estimation for a power-split hybrid transmission using nonlinear robust observer. Mech. Syst. Sig. Pr. 2018, 106, 249–264. [Google Scholar] [CrossRef]
- Oh, J.Y.; Park, J.Y.; Cho, J.W.; Kim, J.G.; Kim, J.H.; Lee, G.H. Influence of a clutch control current profile to improve shift quality for a wheel loader automatic transmission. Int. J. Precis. Eng. Manuf. 2017, 18, 211–219. [Google Scholar] [CrossRef]
- Mishra, K.D.; Srinivasan, K. Robust control and estimation of clutch-to-clutch shifts. Control Eng. Pract. 2017, 65, 100–114. [Google Scholar] [CrossRef]
- Ni, X.D.; Zhu, S.H.; Zhang, H.J.; Chang, Y.L.; Ouyang, D.Y.; Wang, G.M. Experiment of shift quality factors for hydro-mechanical CVT. Trans. Chin. Soc. Agric. Mach. 2013, 44, 29–34. [Google Scholar]
- Lu, K.; Lu, Z.X.; Cheng, Z.; Zheng, S.Q. Study on Influence Rules of Clutch Parameters on HMCVT Shift Performance. Mech. Sci. Technol. Aerosp. Eng. 2019, 38, 1695–1701. [Google Scholar]
- Wei, C.; Ma, Z.Y.; Yin, X.F.; Zhao, J.; Li, X.Y. Research on the Influencing Factors of the Range-Shifting Impact on HMT. Trans. Beijing Inst. Technol. 2015, 35, 1122–1127. [Google Scholar]
- Cao, F.Y.; Feng, Q.; Yang, C.J.; Xu, L.Y. Clutch Switching Timing Optimization of Dual-Mode Hydro-mechanical Transmission Device. J. Xi’an Jiaotong Univ. 2021, 55, 86–93. [Google Scholar]
- Zhu, Z.; Gao, X.; Cao, L.L.; Cai, Y.M.; Pan, D.Y. Research on the shift strategy of HMCVT based on the physical parameters and shift time. Appl. Math. Model. 2016, 40, 6889–6907. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Zhou, X.J.; Shen, L.; Li, Y.J. Simulation and Experiment on Dynamic Engagement Characteristics of Wet Clutch. Chin. J. Highw. Transp. 2010, 23, 115–120. [Google Scholar]
- Wang, C.; Qin, D.T.; Wu, B.Z.; Fang, H.S.; Cheng, K. Simulation and analysis of wet clutch engagement characteristics. J. Chongqing Univ. 2020, 43, 38–51. [Google Scholar]
- Bao, H.Y.; Huang, W.; Lu, F.X. Investigation of engagement characteristics of a multi-disc wet friction clutch. Tribol. Int. 2021, 159, 106940. [Google Scholar]
- Huang, W.; Bao, H.Y.; Zhu, C.; Zhu, R.P. Analysis of squeeze process and engagement characteristics of wet clutch. J. Aerosp. Power 2021, in press.
- Zhang, Z.; Zhu, L.C.; Zheng, X.D. Simulations versus tests for dynamic engagement characteristics of wet clutch. Cogn. Robot. 2021, 1, 125–133. [Google Scholar] [CrossRef]
- Lingesten, N.; Marklund, P.; Höglund, E.; Lund, M.; Lundin, J.; Mäki, R. Apparatus for continuous wear measurements during wet clutch durability tests. Wear 2012, 288, 54–61. [Google Scholar] [CrossRef]
- Chen, Y.; Qian, Y.; Lu, Z.X.; Zhou, S.; Xiao, M.H.; Bartos, P.; Xiong, Y.P.; Jin, G.H.; Zhang, W. Dynamic Characteristic Analysis and Clutch Engagement Test of HMCVT in the High-Power Tractor. Complexity 2021, 2021, 8891127. [Google Scholar] [CrossRef]
- Zhao, J.; Xiao, M.H.; Bartos, P.; Bohata, A. Dynamic engagement characteristics of wet clutch based on hydro-mechanical continuously variable transmission. J. Cent. South Univ. 2021, 28, 1377–1389. [Google Scholar] [CrossRef]
- Cheng, Z.; Chen, Y.T.; Li, W.J.; Liu, J.H.; Li, L.; Zhou, P.F.; Chang, W.J.; Lu, Z.X. Full Factorial Simulation Test Analysis and I-GA Based Piecewise Model Comparison for Efficiency Characteristics of Hydro Mechanical CVT. Machines 2022, 10, 358. [Google Scholar] [CrossRef]
- Laukenmann, M.A.; Sawodny, O. Model-based control of a clutch actuator used in hybrid dual-clutch transmissions. Mechatronics 2021, 77, 102585. [Google Scholar] [CrossRef]
- Zhou, X.J.; Wu, P.H.; Ynag, Z.L.; Xu, J.; Shang, X.B.; Wang, Z.S. Simulation and Experimental Study on the Drag Torque Characteristics of Wet Clutches in High Speed Condition. Automot. Eng. 2019, 41, 1056–1064. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | k1 | k2 | k3 | i1 | i2 | i3 | i4 | i5 | i6 i7 | i8 |
|---|---|---|---|---|---|---|---|---|---|---|
| Value | 2.72 | 2.15 | 2.72 | 0.78 | 1.45 | 1.5 | 1.7 | 0.5 | 1.2 | 1.2 |
| Working Stage | C1 | C2 | C3 |
|---|---|---|---|
| HM1 | + | − | − |
| HM2 | − | + | − |
| HM3 | − | − | + |
| Parameters | Value |
|---|---|
| Oil density ρ/(kg/m3) | 860 |
| Equivalent bulk elastic modulus E/Pa | 1.7 × 109 |
| Clutch piston area Acl/mm2 | 10,293 |
| Number of friction pairs z | 14 |
| Friction plate outer radius r1/mm | 159 |
| Friction plate inner radius r2/mm | 122.3 |
| Piston outer radius R1/mm | 141.8 |
| Piston inner radius R2/mm | 80.1 |
| Return spring stiffness kp/(N/mm) | 573.7 |
| Friction coefficient μf | 0.14 |
| Initial volume of clutch cylinder Vc0/mm3 | 61,904 |
| Parameter | a1/(Nm) | b1/(Nm/Mpa) | b2/(Nm/Mpa) | b3/(Nm/Mpa) |
|---|---|---|---|---|
| Value | 8.616 | 1.43 | 217.27 | 1142.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.; Lu, Z. Analysis of HMCVT Shift Quality Based on the Engagement Characteristics of Wet Clutch. Agriculture 2022, 12, 2012. https://doi.org/10.3390/agriculture12122012
Lu K, Lu Z. Analysis of HMCVT Shift Quality Based on the Engagement Characteristics of Wet Clutch. Agriculture. 2022; 12(12):2012. https://doi.org/10.3390/agriculture12122012
Chicago/Turabian StyleLu, Kai, and Zhixiong Lu. 2022. "Analysis of HMCVT Shift Quality Based on the Engagement Characteristics of Wet Clutch" Agriculture 12, no. 12: 2012. https://doi.org/10.3390/agriculture12122012