

Design and Operating Parameters Optimization of the Hook-and-Tooth Chain Rail Type Residual Film Picking Device
Abstract
:1. Introduction
2. Materials and Methods
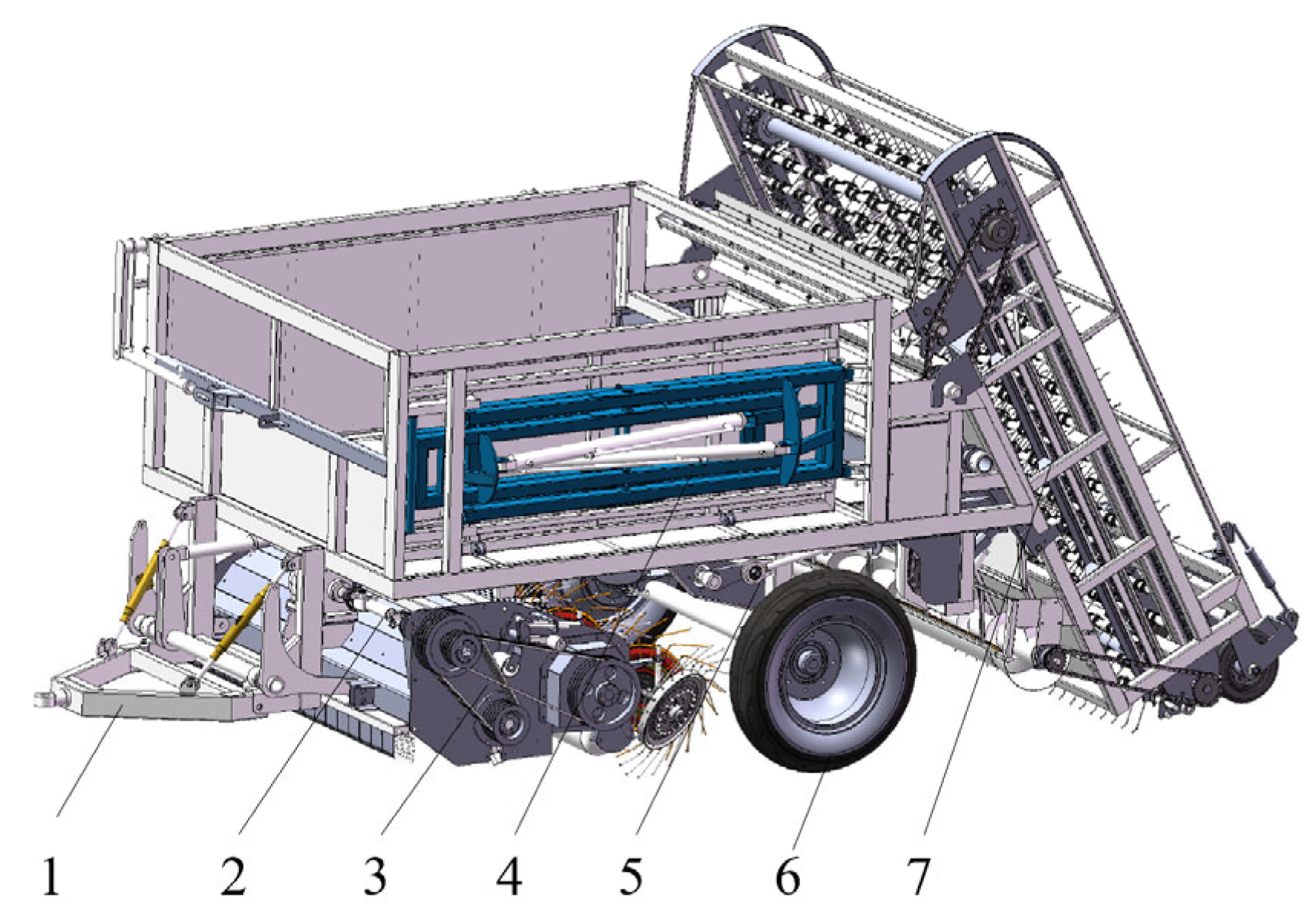
2.1. Structure and Working Principle of Residual Film Recycling Machine
2.1.1. The Main Components and Working Principle of The Picking Device
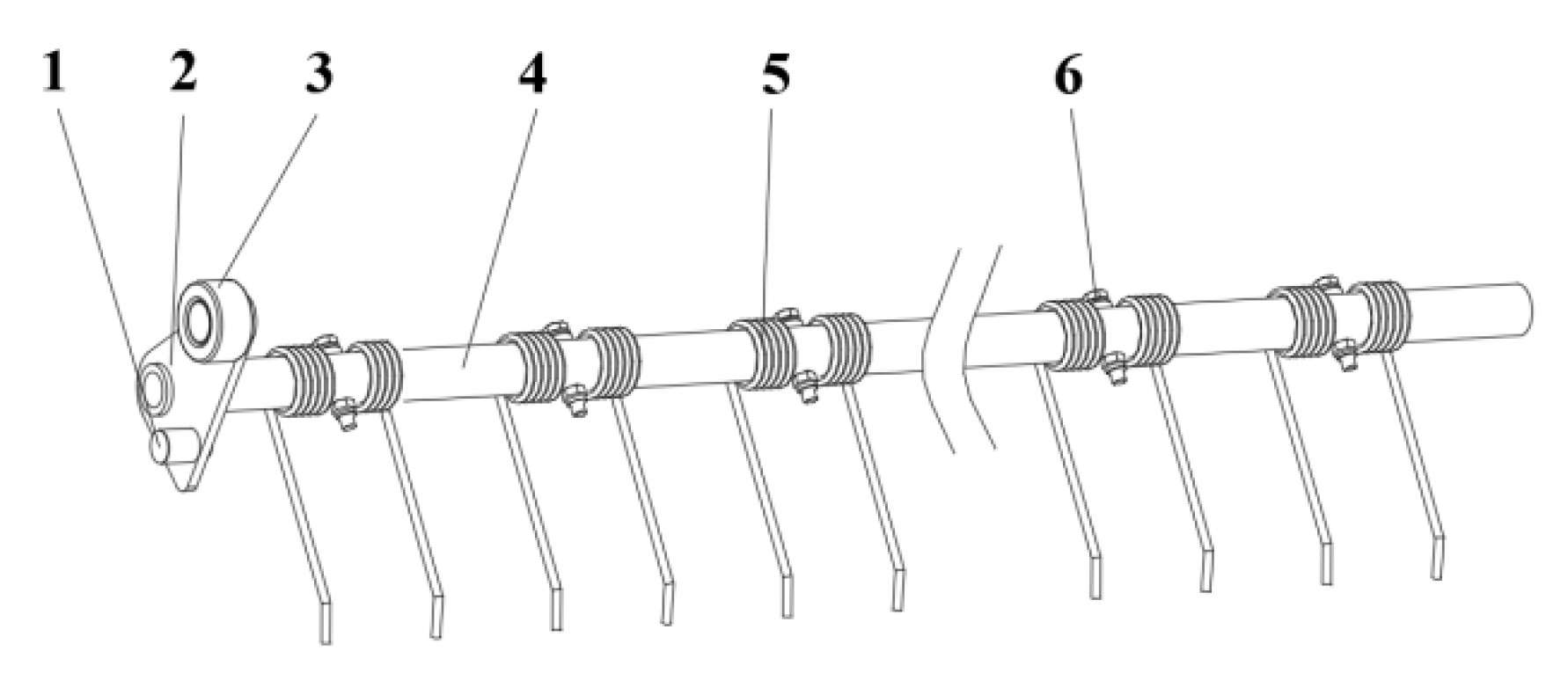
2.1.2. Hook Tooth Assembly
2.1.3. Pick-Up Film Hook Teeth
2.1.4. Hook Tooth Arrangement
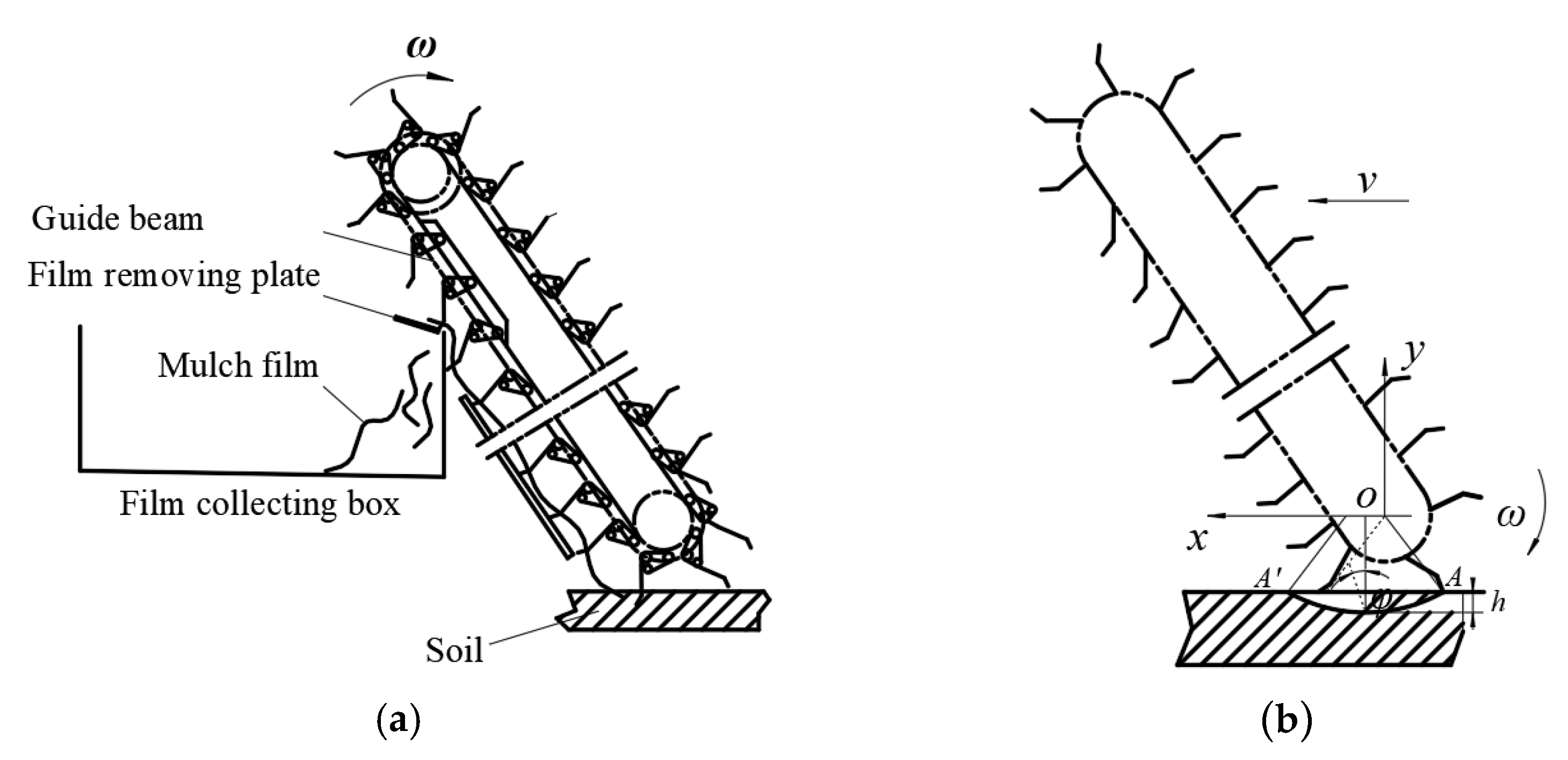
2.2. Analysis of Picking Process of Hook-Tooth Chain Rail Film Picking Device
2.2.1. Determination of Inclination Angle of Hook Teeth
2.2.2. Motion Analysis of Film-Picking Hook Teeth

2.2.3. Reliable Conditions for Residual Film Pickup
2.2.4. Force Analysis of Residual Film in Conveying Process
2.3. Analysis of the De-Filming Process
2.4. Field Tests
2.4.1. Test Materials
2.4.2. Test Methods
2.4.3. Test Results
3. Results and Discussion
- (1)
- Establishment of the regression equation and significance analysis of the residual film pick-up rate
- (2)
- Establishment of the regression equation and significance analysis of the residual film impurity rate
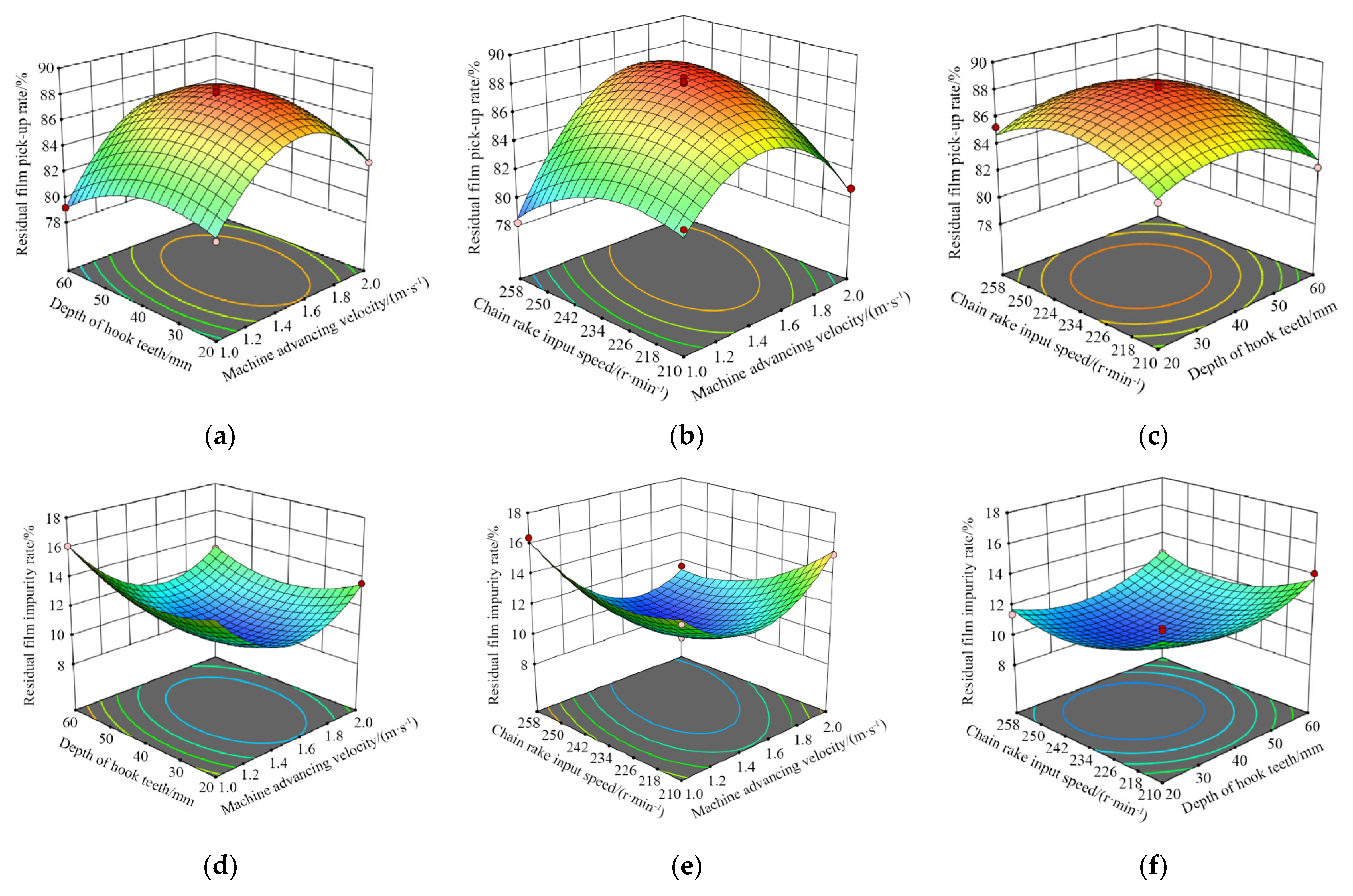
3.1. Response Surface Analysis
- (1)
- Analysis of the influence of the residual film pick-up rate
- (2)
- Effect of factor interaction of the residual film impurity rate
3.2. Parameter Optimization and Test Validation
3.3. Discrete Element Modeling of Hook Tooth Motion Process
3.3.1. Modeling and Parameter Setting of the Simulation Model
3.3.2. Analysis of Simulation Results
4. Conclusions
- 1.
- In response to the problems of high residual film pick-up rate and poor reliability of the existing film recovery machine, a Hook-and-Tooth Chain Rail Type Residual Film Picking Device was designed, introducing the structure and working principle of the main components. By analyzing the main working components of the picking device, the main design parameters of its components were determined.
- 2.
- Field tests were carried out with the machine advancing velocity, depth of hook tooth, and chain rake input speed as influencing factors and the residual film pick-up rate and residual film impurity rate as test indicators. Additionally, the response surface data were analyzed using Design Expert software, and multiple fittings obtained the regression equation of the residual film pick-up rate and the residual film impurity rate. The influence of the interaction of various factors on the residual film pick-up rate and the residual film impurity rate was determined.
- 3.
- Experimental tests on the device proved that when the machine advancing velocity was 1.6 m/s, the depth of the hook tooth was 38 mm, and the chain rake input speed was 241 rpm. With these working parameters, field trials yielded a residual film pick-up rate of 87.52% and a residual film impurity rate of 10.21%. The optimized operating parameters were verified experimentally. Relative errors between the experimental results and optimized theoretical values of the residual film pick-up rate and residual film impurity rate were 0.85% and 2.51%, respectively, which is relatively low. Thus, the model was highly reliable.
- 4.
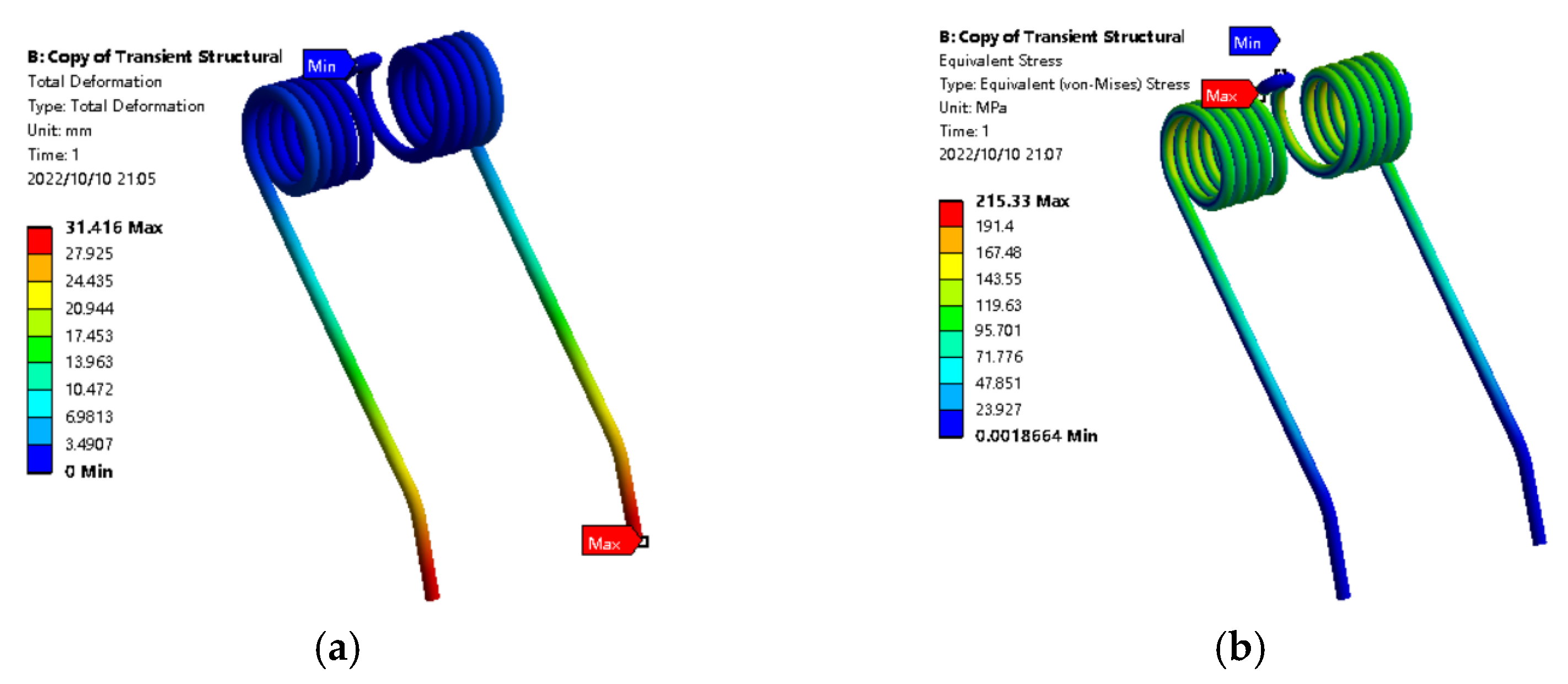
- EDEM simulated the motion process of the hook tooth and obtained the maximum force on the hook tooth during the working process. Then, ANSYS software was used to analyze the stress and deformation of the hook tooth under the state of maximum force, and the structural strength of the hook tooth was verified to meet the design requirements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, Y.; Chen, X.; Wen, H.; Zheng, X.; Niu, Q.; Kang, J. Research Status and Prospect of Control Technology for Residual Plastic Film Pollution in Farmland. Trans. Chin. Soc. Mach. 2017, 48, 1–14. [Google Scholar] [CrossRef]
- Yan, C.; Mei, X.; He, W.; Zheng, S. Present situation of residue pollution of mulching plastic film and controlling measures. Trans. Chin. Soc. Agric. Eng. 2006, 22, 269–272. [Google Scholar]
- Wang, Z.; Chen, X.; Yan, L.; Jiang, D.; Wang, M. Design and Experiment on Collecting and Removing Device for Profile Modeling Residual Plastic Film Collector. Trans. Chin. Soc. Mach. 2021, 52, 80–90. [Google Scholar] [CrossRef]
- Hu, C.; Wang, X.F.; Chen, X.G.; Tang, X.Y.; Zhao, Y.; Yan, C. Current situation and control strategies of residual film pollution in Xinjiang. Trans. Chin. Soc. Agric. Eng. 2019, 35, 223–234. [Google Scholar] [CrossRef]
- Lavo, G. Machine for Removing Wide Strips Laid Out on the Ground. 1995. Available online: https://patents.google.com/patent/US5386876A (accessed on 8 August 2022).
- Parish, R.L. An automated machine for removal of plastic mulch. Trans. ASAE 1999, 45, 49. [Google Scholar] [CrossRef]
- Rocca, A.R. Plastic Mulch Retrieve. 2012. Available online: https://patents.google.com/patent/US8302699B2 (accessed on 8 August 2022).
- Shi, Z.L.; Tang, X.P.; Zhen, J.; Yan, J.S.; Zhang, X.J.; Jin, W. Performance test and motion simulation analysis of nail tooth type mechanism for collecting plastic residue. Trans. Chin. Soc. Agric. Eng. 2019, 35, 64–71. [Google Scholar] [CrossRef]
- Liu, X.F.; Shi, X.; Guo, Z.F.; Wang, C.Y.; Wang, X.N. Performance test on roller type residual film recycling machine. Trans. Chin. Soc. Agric. Eng. 2017, 33, 26–31. [Google Scholar] [CrossRef]
- Tang, Y.; Zhao, Y.; Wang, J.; Wang, Z. Design and experiment of film removing device for clamping finger-chain type residual film collector. Trans. Chin. Soc. Agric. Eng. 2020, 36, 11–19. [Google Scholar] [CrossRef]
- Zhang, X.J.; Liu, J.Q.; Shi, Z.L.; Jin, W.; Yan, J.S.; Yu, M.J. Design and parameter optimization of reverse membrane and soil separation device for residual film recovery machine. Trans. Chin. Soc. Agric. Eng. 2019, 35, 46–55. [Google Scholar] [CrossRef]
- Guo, W.; Jian, J.; San, Y.; Li, G.; Gao, M.; Hou, S. Design and Experimental Optimization of 4CML-1000 Type Chain Rake Film Recycling Machine. Trans. Chin. Soc. Mach. 2018, 49, 66–73. [Google Scholar] [CrossRef]
- Xie, J.; Yang, Y.; Cao, S.; Zhang, Y.; Zhou, Y.; Ma, W. Design and experiments of rake type surface residual film recycling machine with guide chain. Trans. Chin. Soc. Agric. Eng. 2020, 36, 76–86. [Google Scholar] [CrossRef]
- Yin, J.; Liu, D.; Li, Y. Design and Parameters Analyses of Automatic Height Profiling Device of Quadrate-Bale Baler Pickup. Trans. Chin. Soc. Mach. 2014, 45, 86–92. [Google Scholar] [CrossRef]
- Kang, J.; Wang, S.; Yan, L. Design and Experiment of Loosen Shovel Installed on Plastic Film Collecting Machine. Trans. Chin. Soc. Mach. 2016, 47, 143–148. [Google Scholar] [CrossRef]
- Cheng, D.X. Handbook of Mechanical Design; Chemical Industry Press: Beijing, China, 2008. [Google Scholar]
- Zheng, Z.Q.; He, J.; Wang, Q.J.; Li, H.W.; Li, W.Y.; Chen, W.Z. Design and Experiment on Straw Pickup-chopping and Ditch-burying Integrated Machine. Trans. Chin. Soc. Mach. 2017, 48, 87–96. [Google Scholar] [CrossRef]
- Yang, S.; Yan, L.; Mo, Y.; Chen, X.; Zhang, H.; Jiang, D. Design and Experiment on Collecting Device for Profile Modeling Residual Plastic Film Collector. Trans. Chin. Soc. Mach. 2018, 49, 109–115+164. [Google Scholar] [CrossRef]
- Luo, K.; Yuan, P.; Jin, W.; Yan, J.S.; Bai, S.; Zhang, C.; Zhang, X.J. Design of chain-sieve type residual film recovery machine in plough layer and optimization of its working parameters. Trans. Chin. Soc. Agric. Eng. 2018, 34, 19–27. [Google Scholar] [CrossRef]
- Yan, W.; Hu, Z.; Wu, N.; Xu, H.; You, Z.; Zhou, X. Parameter optimization and experiment for plastic film transport mechanism of shovel screen type plastic film residue collector. Trans. Chin. Soc. Agric. Eng. 2017, 33, 17–24. [Google Scholar] [CrossRef]
- Xie, J.; Zhang, F.; Chen, X.; Han, Y.J.; Tang, W. Design and parameter optimization of arc tooth and rolling bundle type plastic film residue collector. Trans. Chin. Soc. Agric. Eng. 2019, 35, 26–37. [Google Scholar] [CrossRef]
- You, J.; Chen, X.; Zhang, B.; Wu, J. Design and experiment of 4JSM-2000 type combined operation machine for cotton stalk chopping and residual plastic film collecting. Trans. Chin. Soc. Agric. Eng. 2017, 33, 10–16. [Google Scholar] [CrossRef]
- You, Z.; Hu, Z.; Wu, H.; Zhang, Y.; Yan, J.; Yan, W.; Zhou, X. Design and experiment of 1MCDS-100A typed shovel-sieve residual film recovery machine. Trans. Chin. Soc. Agric. Eng. 2017, 33, 10–18. [Google Scholar]
- Zhang, Z.; Li, J.; Wang, X.; Zhao, Y.; Xue, S.; Su, Z. Parameters Optimization and Test of an Arc-Shaped Nail-Tooth Roller-Type Recovery Machine for Sowing Layer Residual Film. Agriculture 2022, 12, 660. [Google Scholar] [CrossRef]
- Zhong, W.Q.; Yu, A.B.; Liu, X.J.; Tong, Z.B.; Zhang, H. DEM/CFD-DEM Modelling of Non-spherical Particulate Systems: Theoretical Developments and Applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Wu, T.; Huang, W.; Chen, X.; Ma, X.; Han, Z.; Pan, T. Calibration of discrete element model parameters for cohesive soil considering the cohesion between particles. J. South China Agric. Univ. 2017, 38, 93–98. [Google Scholar] [CrossRef]
- Wang, X.; Hu, H.; Wang, Q.; Li, H.; He, J.; Chen, W. Calibration method of soil contact characteristic parameters based on DEM theory. Trans. Chin. Soc. Mach. 2017, 48, 78–85. [Google Scholar] [CrossRef]
- Wang, H.; Cao, S.; Liu, Y.; Yang, Y.; Meng, X.; Ji, P. Design of Cotton Recovery Device and Operation Parameters Optimization. Agriculture 2022, 12, 1296. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameters of the Picking Device | Value |
|---|---|
| Structure form | Traction type |
| Dimension (length × width × height)/mm | 2240 × 880 × 3170 |
| Matched power/kW | 88.20 |
| Operating speed/(km·h−1) | 4–8 |
| Effective operating width/mm | 1875 |
| Residual film pick-up rate/% | ≥85 |
| Residual film impurity rate/% | ≤12 |
| Coded Value | Machine Advancing Velocity X1 (m·s−1) | Depth of Hook Tooth X2 (mm) | Chain Rake Input Speed X3 (rpm) |
|---|---|---|---|
| −1 | 1.0 | 20 | 210 |
| 0 | 1.5 | 40 | 234 |
| 1 | 2.0 | 60 | 258 |
| Test | X1 | X2 | X3 | μ1 | μ2 |
|---|---|---|---|---|---|
| 1 | 0 | −1 | −1 | 84.1 | 13.4 |
| 2 | 1 | 1 | 0 | 83.8 | 13.2 |
| 3 | 1 | 0 | 1 | 85.2 | 11.6 |
| 4 | 0 | 0 | 0 | 87.6 | 10.5 |
| 5 | 0 | 0 | 0 | 88.5 | 9.8 |
| 6 | 1 | −1 | 0 | 82.8 | 13.6 |
| 7 | 0 | 0 | 0 | 88.1 | 10.2 |
| 8 | 1 | 0 | −1 | 80.7 | 15.3 |
| 9 | 0 | 1 | −1 | 82.3 | 14.1 |
| 10 | −1 | 0 | −1 | 82.4 | 14.2 |
| 11 | 0 | 1 | 1 | 84.8 | 12.6 |
| 12 | 0 | 0 | 0 | 88.2 | 10.3 |
| 13 | 0 | 0 | 0 | 87.9 | 10.3 |
| 14 | 0 | −1 | 1 | 85.3 | 11.4 |
| 15 | −1 | 0 | 1 | 78.2 | 16.4 |
| 16 | −1 | −1 | 0 | 81.3 | 14.7 |
| 17 | −1 | 1 | 0 | 79.2 | 16.1 |
| Source of Variation | DOF | Residua Film Pick-Up Rate μ1/% | Residua Film Impurity Rate μ2/% | ||||
|---|---|---|---|---|---|---|---|
| Sum of Squares | F | Significant Level p | Sum of Squares | F | Significant Level p | ||
| Models | 9 | 165.94 | 4.46 | <0.0001 ** | 74.63 | 65.92 | <0.0001 ** |
| X1 | 1 | 16.24 | 19.22 | 0.0001 ** | 7.41 | 58.92 | 0.0001 ** |
| X2 | 1 | 1.44 | 3.01 | 0.0671 | 1.05 | 8.36 | 0.0233 * |
| X3 | 1 | 2.00 | 1.61 | 0.0382 * | 3.13 | 24.84 | 0.0016 ** |
| X1 X2 | 1 | 2.4025 | 9.68 | 0.0268 * | 0.8100 | 6.44 | 0.0388 * |
| X1 X3 | 1 | 18.92 | 3.58 | <0.0001 ** | 8.70 | 69.19 | <0.0001 ** |
| X2 X3 | 1 | 0.4225 | 0.70 | 0.2799 | 0.0625 | 0.4969 | 0.5036 |
| X12 | 1 | 81.24 | 0.23 | <0.0001 ** | 33.96 | 269.99 | <0.0001 ** |
| X22 | 1 | 15.08 | 1.89 | 0.0002 ** | 7.56 | 60.11 | 0.0001 ** |
| X32 | 1 | 17.57 | 0.25 | 0.0001 ** | 7.28 | 57.88 | 0.0001 ** |
| Residual | 7 | 2.16 | 0.8805 | ||||
| Lack of fit | 3 | 1.70 | 1.96 | 0.0763 | 0.6125 | 3.05 | 0.1549 |
| Pure error | 4 | 0.4520 | 0.2680 | ||||
| Total | 16 | 168.10 | 75.51 | ||||
| Parameter | Residua Film Pick-Up Rate μ1/% | Residua Film Impurity Rate μ2/% |
|---|---|---|
| Theoretical optimization value | 88.27 | 9.96 |
| Test average | 87.52 | 10.12 |
| Relative error | 0.85 | 2.51 |
| Item | Parameter | Value |
|---|---|---|
| Soil particles | Poisson’s ratio | 0.30 |
| Shear modulus/Pa | 5 × 107 | |
| Density/(kg·m−3) | 2600.00 | |
| Hook teeth | Poisson’s ratio | 0.35 |
| Shear modulus/Pa | 7.27 × 1010 | |
| Density/(kg·m−3) | 7890.00 | |
| Soil particles-Soil particles | Recovery coefficient | 0.21 |
| Static friction coefficient | 0.68 | |
| Dynamic friction coefficient | 0.27 | |
| Soil particles-Hook teeth | Recovery coefficient | 0.32 |
| Static friction coefficient | 0.54 | |
| Dynamic friction coefficient | 0.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, S.; Xie, J.; Wang, H.; Yang, Y.; Zhang, Y.; Zhou, J.; Wu, S. Design and Operating Parameters Optimization of the Hook-and-Tooth Chain Rail Type Residual Film Picking Device. Agriculture 2022, 12, 1717. https://doi.org/10.3390/agriculture12101717
Cao S, Xie J, Wang H, Yang Y, Zhang Y, Zhou J, Wu S. Design and Operating Parameters Optimization of the Hook-and-Tooth Chain Rail Type Residual Film Picking Device. Agriculture. 2022; 12(10):1717. https://doi.org/10.3390/agriculture12101717
Chicago/Turabian StyleCao, Silin, Jianhua Xie, Hezheng Wang, Yuxin Yang, Yanhong Zhang, Jinbao Zhou, and Shihua Wu. 2022. "Design and Operating Parameters Optimization of the Hook-and-Tooth Chain Rail Type Residual Film Picking Device" Agriculture 12, no. 10: 1717. https://doi.org/10.3390/agriculture12101717