



Study on the Intercropping Mechanism and Seeding Improvement of the Cavity Planter with Vertical Insertion Using DEM-MBD Coupling Method


Abstract
:1. Introduction
2. Materials and Methods
2.1. Virtual Prototype Establishment of the Cavity Planter with Vertical Insertion
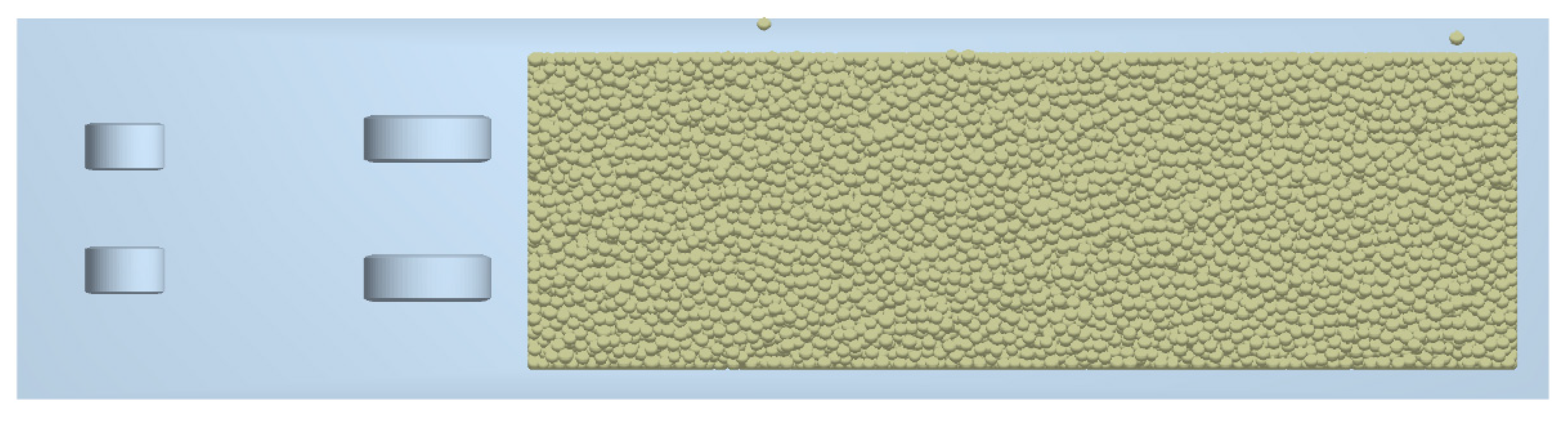
2.2. Soil Modeling
2.3. Maize Seed Modeling
2.4. Coupling Modeling
3. Results
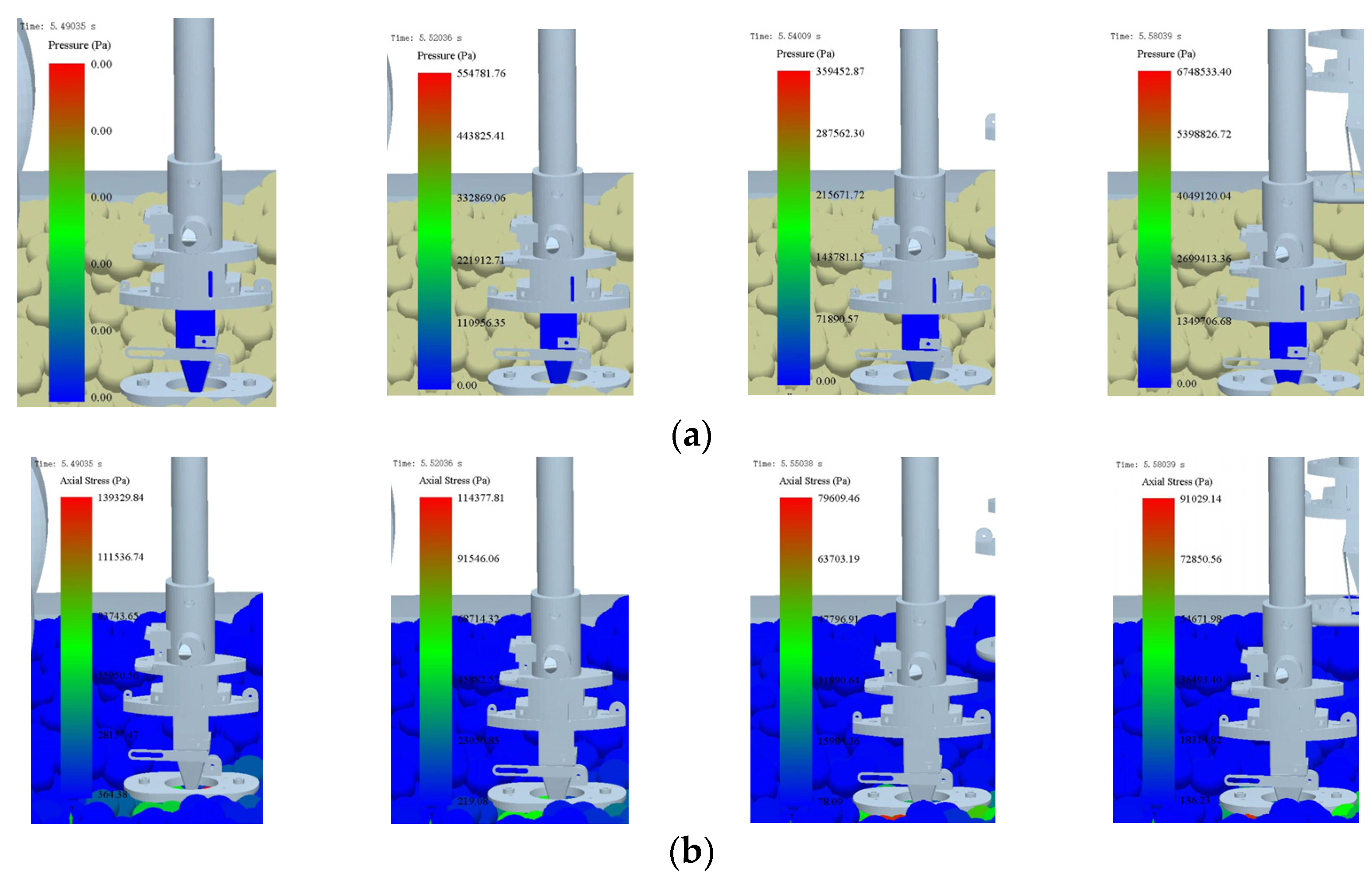
3.1. Coupling Process
3.2. Effect of Soil Type on Soil Disturbance
3.3. Effect of Water Content on the Amount of Soil Disturbance
3.4. Influence of the Rotation Speed Ratio on the Amount of Soil Disturbance
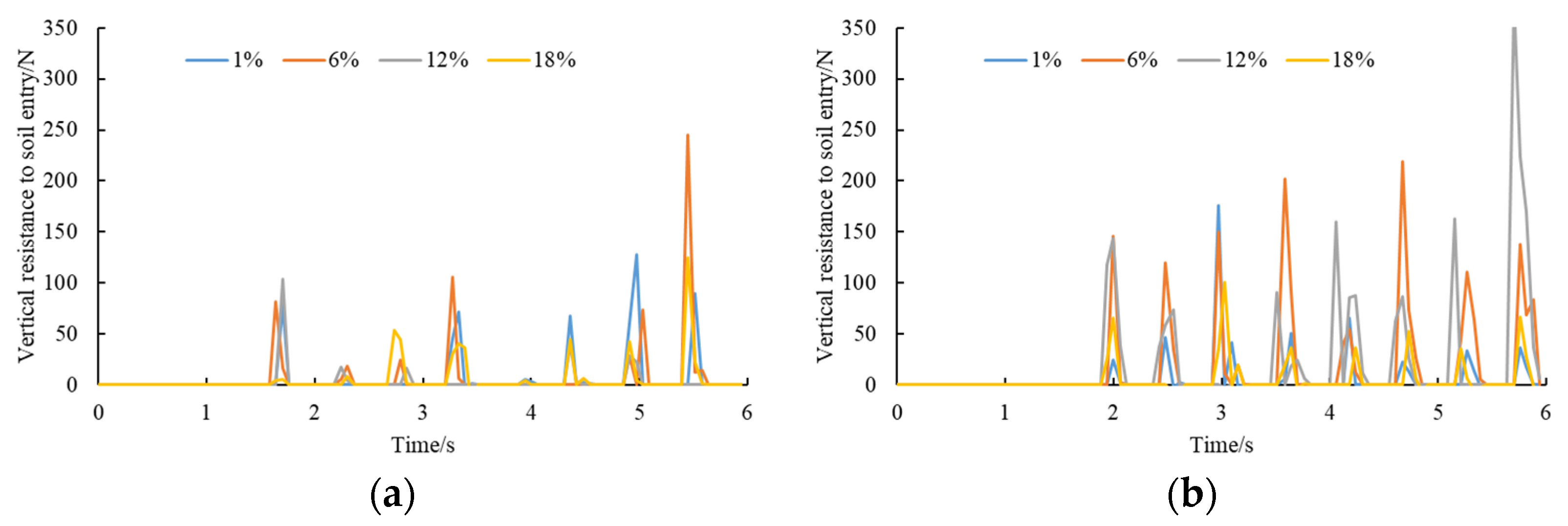
3.5. Effect of Water Content on the Resistance to Soil Entry
3.6. Effect of Maize Type on Seeding Performance
3.7. Effect of Maize Seeds’ Movement in Cavity Seeder on Seed Filling Performance
3.8. Simulation and Experimental Verification
4. Conclusions
- (1)
- The results of the simulation show that soil type and water content influence the trajectory of the cavity seeder. The slip rate of the cavity planter on sandy loam is significantly higher than that of sandy soils at the same water content. As the speed of the traction wheel decreases, the trajectory of the cavity planter gradually moves backward. As the ratio decreases, the traction wheel speed increases, and the motion trajectory gradually advances. The cavity planter causes soil disturbance due to the different types of soil. It is recommended to moderately disturb the soil above the intersection of trajectory to enlarge the hole seeder and increase air circulation.
- (2)
- During the cavity seeding machine’s operation, the resistance of the cavity planter basically increased with the rise in the water content of sandy soil and sandy loam. It was found that the entry resistance of sandy loam is significantly higher than that of sandy soil.
- (3)
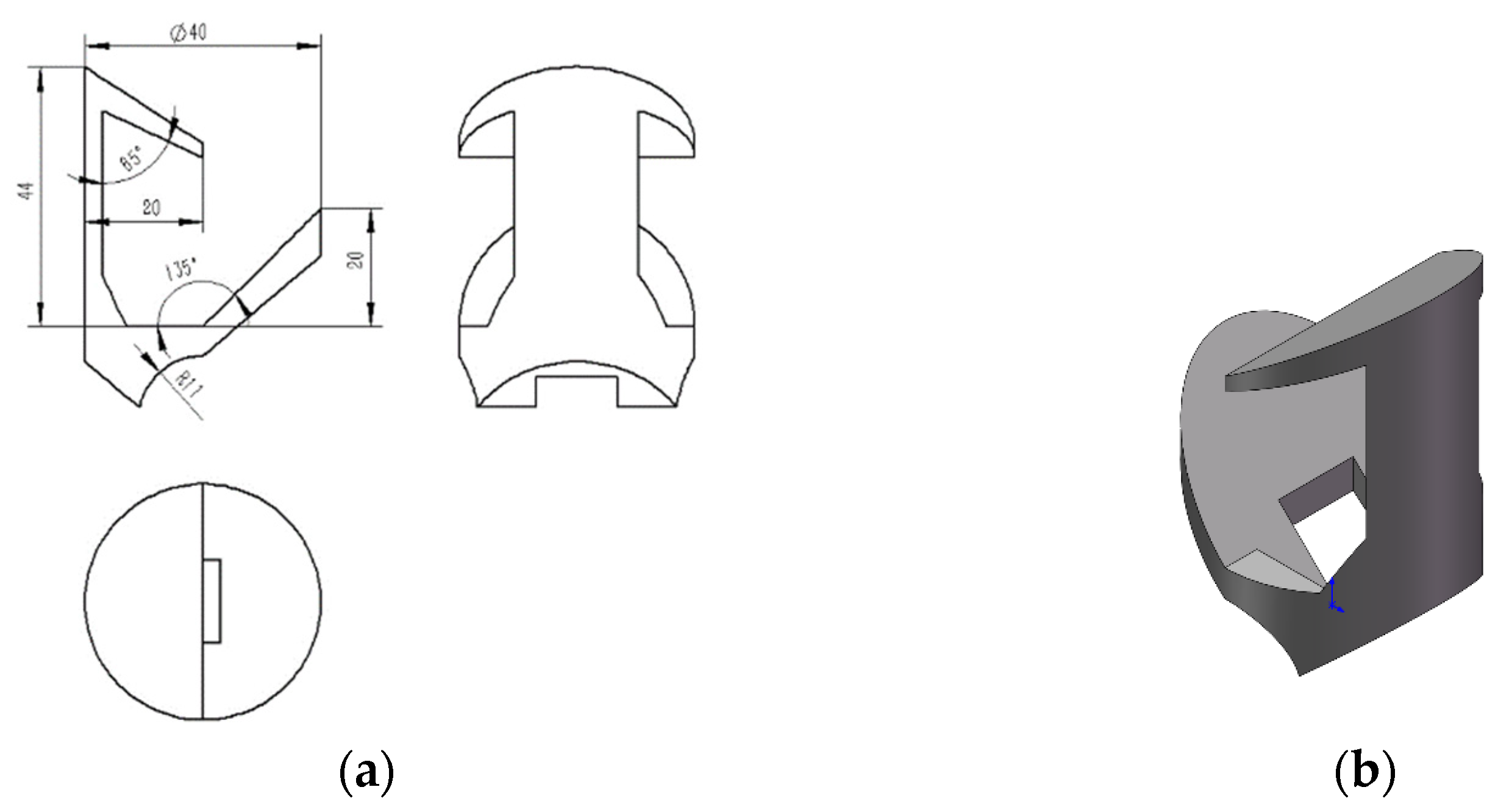
- As the contact height between maize and the inner wall was large, this did not facilitate seed filling. After two improvements to the inverted hook structure in the seed tube, the maize model above the inverted hook moved at a faster speed and had an uneven distribution. The inverted hook for guiding seeds enhanced the seed filling. Finally, the seeds’ seeding performance was verified under certain conditions of the shaped groove structure size with an angle of the inner groove line of 110°, the width of the shaped groove of 11.79 mm, the height of 7.23 mm, the length of 14.67 mm, the opening angle of 15°, and the maximum diameter of the spherical hole of 5.5 mm. The results showed that the empty cavity rate was 25%, and the seed number qualification was 75%, while the average empty cavity rate and the seed number qualification were 2.0% and 91.3%, respectively. The improved structure meets design and agronomic requirements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Zhao, C.G. Current status of soil mechanics and discussion of some problems in its numerical analysis methods. Geotechnical 2006, 27, 1361–1364. [Google Scholar]
- Cundall, P.A. A Computer Model for Simulating Progressive Large Scale Movement sin Blocky Rock Systems. Proc. Int. Symp. Rock Fract. 1971, 1, 8–11. [Google Scholar]
- Fielke, J.M.; Ucgul, M.; Saunders, C. Discrete element modeling of soil-implement interaction considering soil plasticity, cohesion and adhesion. In Proceedings of the 2013 ASABE Annual International Meeting, Kansas City, MO, USA, 21–24 July 2013; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2013. [Google Scholar]
- Zhang, Z.G.; Xue, H.T.; Wang, Y.C.; Xie, K.T.; Deng, Y.X. Design and Experiment of Panax notoginseng Bionic Excavating Shovel Based on EDEM. Trans. Chin. Soc. Agric. Mech. 2022, 53, 100–111. [Google Scholar]
- Ono, I.; Nakashima, H.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. Investigation of elemental shape for 3D DEM modeling of interaction between soil and a narrow cutting tool. J. Terramech. 2013, 50, 265–276. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.Y.; Huang, W.B. Three-dimensional discrete element modeling and simulation scheme planning for tillage soil mechanics. Trans. Chin. Soc. Agric. Eng. 2003, 19, 34–38. [Google Scholar]
- Zhang, R.; Li, J.Q. Simulation on mechanical behavior of cohesive soil by distinct element method. J. Terramech. 2006, 43, 303–316. [Google Scholar] [CrossRef]
- Zhang, R.; Li, J.Q.; Zhou, C.H.; Xu, S.C. Discrete element simulation of the effect of dozer surface morphology on soil dynamic behavior. Trans. Chin. Soc. Agric. Eng. 2007, 23, 13–19. [Google Scholar]
- Zhang, X.R.; Zeng, W.Q.; Liu, J.X.; Wu, P.; Dong, X.H.; Hu, H.N. Design and Experiment of Lateritic Soil Inclined Handle Folding Wing Subsoiling Shovel Based on Discrete Element Method. Trans. Chin. Soc. Agric. Mech. 2022, 53, 40–49. [Google Scholar]
- Markauskas, D.; Ramirez-Gomez, A.; Kacianauskas, R.; Zdancevicius, E. Maize grain shape approaches for DEM modeling. Comput. Electron. Agric. 2015, 118, 247–258. [Google Scholar] [CrossRef]
- Chen, Z.R.; Yu, J.Q.; Xue, D.M.; Wang, Y.; Zhang, Q.; Ren, L.Q. An approach to and validation of maize-seed-assembly modeling based on the discrete element method. Powder Technol. 2018, 328, 167–183. [Google Scholar] [CrossRef]
- Zhao, Y.C.; Teng, H.L.; Dong, W.T.; Zhao, X.L.; Jia, S.H.; Li, M.; Yuan, C. Application of ADAMS in the simulation design of agricultural machinery. Agric. Net. Inform. 2013, 41–44. [Google Scholar] [CrossRef]
- Zhang, C.Q. Application of virtual prototype technology on agricultural machinery design. Agric. Equip. Tech. 2021, 47, 48–49. [Google Scholar]
- Hu, J.P.; Pan, J.; Chen, F.; Yue, R.C.; Yao, M.J.; Li, J. Simulation Optimization and Experiment of Finger-clamping Seedling Picking Claw Based on EDEM-RecurDyn. Trans. Chin. Soc. Agric. Mech. 2022, 53, 75–85, 301. [Google Scholar]
- Zeng, Z.W.; Ma, X.; Cao, X.L.; Li, Z.H.; Wang, X.C. Current status and the prospect of application of discrete element method in agricultural engineering research. Trans. Chin. Soc. Agric. Mech. 2021, 52, 1–20. [Google Scholar]
- Ji, L.L.; Xie, H.X.; Yang, H.G.; Wei, H.; Yan, J.C.; Shen, O. Simulation analysis of dry soil clearing device for potato based on EDEM_Recurdyn coupling. Chin. J. Agric. Chem. 2021, 42, 109–115. [Google Scholar]
- Wang, X.L.; Hu, H.; Wang, Q.J.; Li, H.W.; He, J.; Chen, W.Z. Discrete element-based calibration method for soil model parameters. Trans. Chin. Soc. Agric. Mech. 2017, 48, 78–85. [Google Scholar]
- Zhang, X.C.; Li, H.W.; Du, R.C.; Ma, S.C.; He, J.; Wang, Q.J.; Chen, W.Z.; Zheng, Z.Q.; Zhang, Z.Q. Influence of key structural parameters of sliding trencher on soil characteristics of seed beds. Chin. Agric. Dig. Eng. 2017, 29, 7–15, 32. [Google Scholar]
- Shi, L.R.; Zhao, W.Y.; Sun, W. Discrete element-based particle contact model and parameter calibration for agricultural soils in dry areas of Northwest China. Trans. Chin. Soc. Agric. Eng. 2017, 33, 181–187. [Google Scholar]
- Das, B.M. Advanced Soil Mechanics; Taylor & Francis: New York, NY, USA, 1997; pp. 14–20. [Google Scholar]
- Li, X.F.; Liu, F.; Zhao, M.Q.; Zhang, T.; Li, F.L.; Zhang, Y. Determination of contact parameters between maize seed and seed rower. Agric. Mech. Res. 2018, 40, 149–153. [Google Scholar]
- Jia, G.X. Design and Experiment of Chain Spoon Type Ginseng Precision Seeder; Kunming University of Science and Technology: Kunming, China, 2021. [Google Scholar]
- Zhang, R.; Han, T.L.; Ji, Q.L.; He, Y.; Li, J.Q. Research on the calibration method of sand and soil parameters in discrete element simulation. Trans. Chin. Soc. Agric. Mech. 2017, 48, 49–56. [Google Scholar]
- Liu, J.; Cui, T.; Zhang, D.X.; Yang, L.; Gao, N.N.; Wang, B. Effect of seed grading treatment of maize on the sowing effect of pneumatic precision seeder. Trans. Chin. Soc. Agric. Eng. 2010, 26, 109–113. [Google Scholar]
- Li, Y.F.; Yi, S.J.; Sun, Z.J.; Chen, T.; Ma, C.C.; Dong, J. Research on the seed filling performance of nest-groove type cereal hole sowing and seeding device. Trans. Chin. Soc. Agric. Mech. 2021, 43, 57–63. [Google Scholar]
- Lai, Q.H.; Jia, G.X.; Su, W.; Hong, F.W.; Zhao, J.W. Design and experiment of convex packet shaped hole nest-groove wheel type ginseng precision seed rower. Trans. Chin. Soc. Agric. Mech. 2020, 51, 60–71. [Google Scholar]
- Wang, Y.X.; Liang, Z.J.; Zhang, D.X.; Cui, T.; Shi, S.; Li, K.H.; Yang, L. Calibration of interspecific contact parameters for discrete element-based maize seed particle model. Trans. Chin. Soc. Agric. Eng. 2016, 32, 36–42. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Content % | Coefficient of Static Friction | Yield Strength/kPa | Rolling Friction Coefficient | Stiffness Factor | Damping Factor | Coefficient of Restitution | Cohesion Strength/kPa |
|---|---|---|---|---|---|---|---|
| 1 | 0.06 | 10.38 × 106 | 0.01 | 0.73 | 0.95 | 0.6 | 7.04 |
| 6 | 0.05 | 9.55 × 106 | 0.01 | 0.73 | 0.95 | 0.6 | 6.13 |
| 12 | 0.05 | 8.89 × 106 | 0.01 | 0.73 | 0.95 | 0.6 | 6.14 |
| 18 | 0.03 | 8.78 × 106 | 0.01 | 0.73 | 0.95 | 0.6 | 3.64 |
| Water Content % | Coefficient of Static Friction | Rolling Friction Coefficient | Coefficient of Restitution | Cohesion Strength/kPa |
|---|---|---|---|---|
| 1 | 0.1 | 0.72 | 0.6 | 11.04 |
| 6 | 0.07 | 0.68 | 0.6 | 8.09 |
| 12 | 0.02 | 0.66 | 0.6 | 3.26 |
| 18 | 0.02 | 0.59 | 0.6 | 3.14 |
| Parameter | Value | Source | |||
|---|---|---|---|---|---|
| Water content of sandy soil/sandy loam/% | 1 | 6 | 12 | 18 | |
| Soil particle density of sandy soil/sandy loam/(kg/m3) | 1600/1200 | Measurement | |||
| Poisson’s ratio of sandy soil/sandy loam | 0.3/0.4 | Literature [18,19] | |||
| Shear modulus of sandy soil/sandy loam/MPa | 11.5/3.27 | Calculation [18,19] | |||
| Steel density/(kg/m3) | 7850 | Literature [20] | |||
| Steel Poisson’s ratio | 0.3 | Literature [20] | |||
| Steel shear modulus/MPa | 7.9 × 104 | Literature [20] | |||
| Coefficient of static friction between soil and steel | 0.5 | Literature [20] | |||
| Coefficient of rolling friction between soil and steel | 0.05 | Literature [20] | |||
| Coefficient of restitution between soil and steel | 0.6 | Literature [20] | |||
| Rubber density/(kg/m3) | 940 | Literature [16] | |||
| Rubber Poisson’s ratio | 0.47 | Literature [16] | |||
| Shear modulus of rubber/MPa | 2.9 × 103 | Literature [16] | |||
| Coefficient of static friction between soil and rubber | 0.57 | Literature [16] | |||
| Coefficient of rolling friction between soil and rubber | 0.31 | Literature [16] | |||
| Coefficient of restitution between soil and rubber | 0.6 | Literature [16] | |||
| Parameters | Value | ||||
|---|---|---|---|---|---|
| Rotation speed of forward speed compensation mechanism/(rad/s) | 11.50 | 11.50 | 11.50 | 11.50 | 11.50 |
| Rotation speed of traction wheel/(rad/s) | 4.44 | 3.72 | 3.2 | 2.81 | 2.51 |
| Ratio | 2.59 | 3.09 | 3.59 | 4.09 | 4.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, L.; Zhao, W.; Hua, C.; Rao, G.; Guo, J.; Wang, Z. Study on the Intercropping Mechanism and Seeding Improvement of the Cavity Planter with Vertical Insertion Using DEM-MBD Coupling Method. Agriculture 2022, 12, 1567. https://doi.org/10.3390/agriculture12101567
Shi L, Zhao W, Hua C, Rao G, Guo J, Wang Z. Study on the Intercropping Mechanism and Seeding Improvement of the Cavity Planter with Vertical Insertion Using DEM-MBD Coupling Method. Agriculture. 2022; 12(10):1567. https://doi.org/10.3390/agriculture12101567
Chicago/Turabian StyleShi, Linrong, Wuyun Zhao, Chengting Hua, Gang Rao, Junhai Guo, and Zun Wang. 2022. "Study on the Intercropping Mechanism and Seeding Improvement of the Cavity Planter with Vertical Insertion Using DEM-MBD Coupling Method" Agriculture 12, no. 10: 1567. https://doi.org/10.3390/agriculture12101567