1. Introduction
With the continuous development of agricultural modernization and intelligence levels, studies on the techniques of agricultural machinery, such as tractors, are increasingly improved [
1,
2,
3,
4,
5,
6]. Tractors generally work in the conditions of severe environment and variable load. Working steadily, as well as adapting to load changes and a wide variation range of speeds, compose the technical requirements for tractors to work in various working conditions, and meet the technical requirements of modernized precision agriculture on tractors’ operating speed and power output. The application of the HST (Hydrostatic Transmission) can meet the abovementioned technical requirements of tractors [
7].
The HST can realize the free changes of output speed in the working range through a pump-motor system and is a continuously variable speed transmission unit [
8]. The HST has the advantages of the hydraulic transmission system (compact structure, smooth transmission, strong carrying capacity and so on) [
9] and reduces the driver’s intensity of work through the electronic control technology (the tractor has a great number of gear states, and the traditional mechanical transmission has an impact during gear shifts [
10,
11]).
Currently, most studies on tractors’ continuously variable speed transmission focus on the HMCVT (Hydromechanical Continuously Variable Transmission) [
12,
13,
14,
15]. However, the HMCVT generally has a large volume compared with the HST, so the HST can better meet the lightweight requirement. Moreover, the HMCVT has a complicated transmission structure, while the HST can realize a large range of continuously variable speeds through the combination of itself and the mechanical transmission box. To date, there have been few studies on the HST of tractors. Ren et al. [
16], Jiang et al. [
7], Liu et al. [
17], Zhao et al. [
18] and Kim et al. [
19] researched the efficiency characteristics, fuel economy, dynamic system’s design, and matching and constant speed cruise control of the HST for tractors, respectively. However, the studies focused less on the open/closed-loop variable speed control of the tractor HST in the high-load working range. The tractor has different working loads in the field operation and transportation operation, and the constant-speed running is a key index representing the performance of the tractor. In addition, the working load of the tractor influences the adjustable speed transmission characteristics of the HST in the open-loop control mode. In this case, the HST’s output adjustable speed characteristics are not unique if there is no HST closed-loop feedback control system.
The signals measured and collected with the sensor have varying degrees of noise. To make the measured signals applicable to engineering technologies more accurately (for instance, the evaluation of the control system effect applied in the research), it is necessary to filter the measured signals obtained. The classical denoising methods (such as the wavelet denoising, which has been widely applied [
20,
21,
22]) can achieve a good denoising result in certain conditions. However, the methods primarily depend on the setting of the empirical parameters. If the parameters set in advance are not reasonable, then the signals may still have a lot of noise after denoising or the useful signals may be mistakenly removed. The empirical mode decomposition method (EMD) [
23,
24,
25] does not require a choice of primary function and is an adaptive signal decomposition method. However, when using the EMD, there will be a series of intrinsic mode functions obtained, of which some should be removed (i.e., the noise signals) and some should be reserved (i.e., the real signals). Therefore, how to choose and reserve reasonable intrinsic mode functions is the key scientific problem in the research.
Therefore, the paper researches the variable speed control of the HST of tractors with different loads, and analyzes and evaluates the variable speed control effect. Specifically, the paper first performs the open-loop control test with different loads using the HST test bench of the tractor built, and compares the test results with the theoretical results. Next, the paper performs the PID control test of the tractor HST in different loading conditions. In addition, the paper proposes a denoising method combined the EMD (Empirical Mode Decomposition), the Gaussian distribution probability density function fitting (GD-PDF-F) and the skewness-kurtosis test. Finally, according to the measured results of the tests and based on the PLS (Partial Least Squares), the paper evaluates and analyzes the PID control results in different working load ranges. The paper aims to offer a valuable reference for future studies on the control system design, strategy development, unmanned work and precision agriculture of the continuously variable transmission unit of the tractor.
4. Conclusions
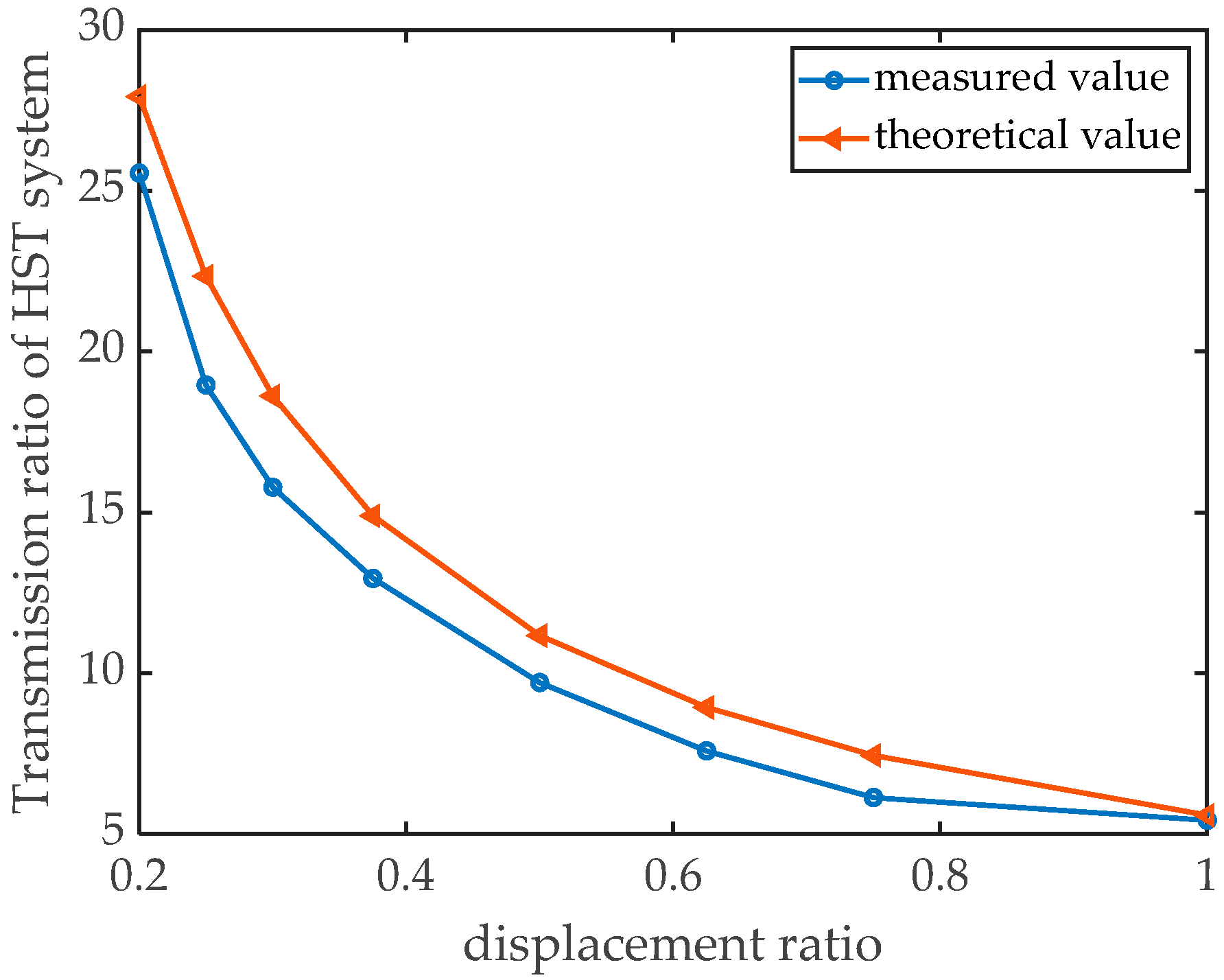
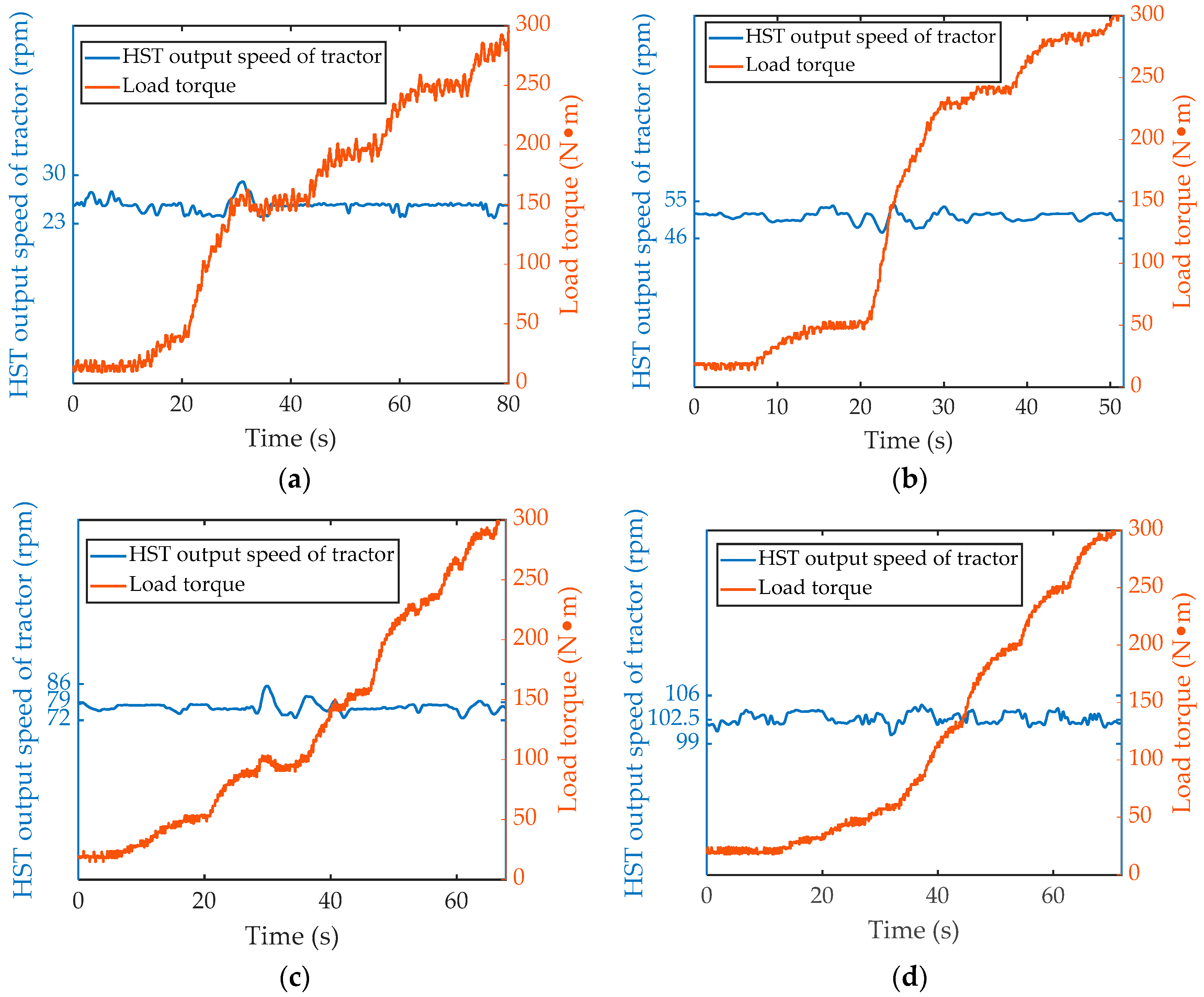
Estimating a tractor’s driving power performance according to the theoretical adjustable speed transmission characteristics of the HST only is not accurate. The step response test shows that the tractor consumes little time to step from one fixed working speed to the next fixed working speed, with an average rise of 0.87 s. The overshoot was generally lower than 5%, and the steady-state error was small. The load disturbance test results show that the researched PID control system can meet the load adaptation requirement well. When the load changes, the system can keep the output speed constant to a large extent (i.e., the error between output speed and target speed is small). In the four situations of closed-loop control, the errors between the average output speed and the target value set were 0.54% (25.75 rpm), 0.37% (51.50 rpm), 0.27% (77.25 rpm) and 0.30% (103 rpm), respectively, with relatively small standard deviation and maximum deviation.
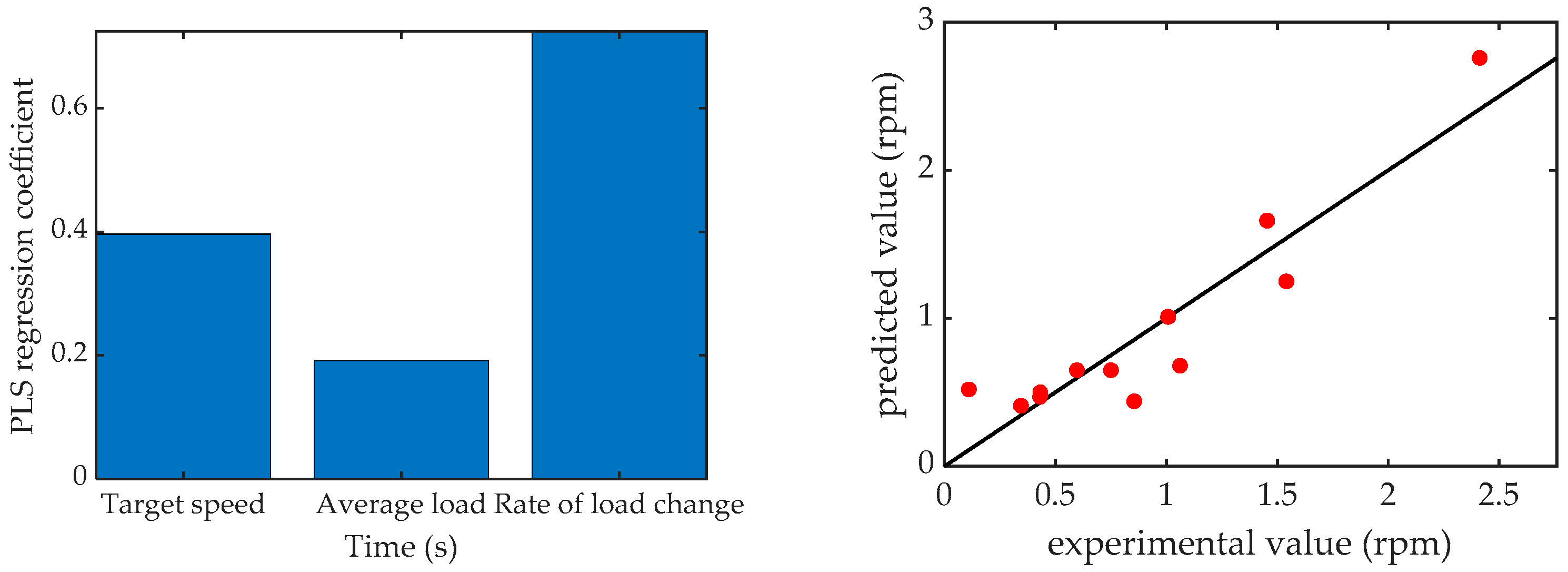
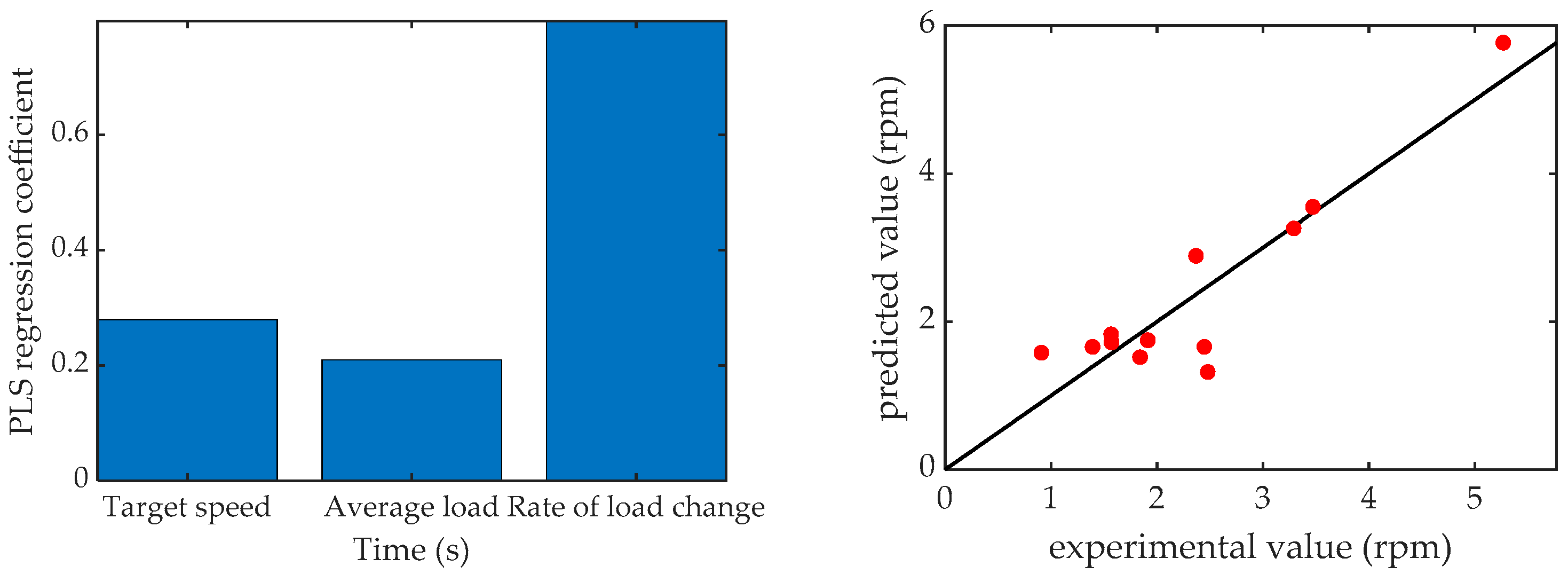
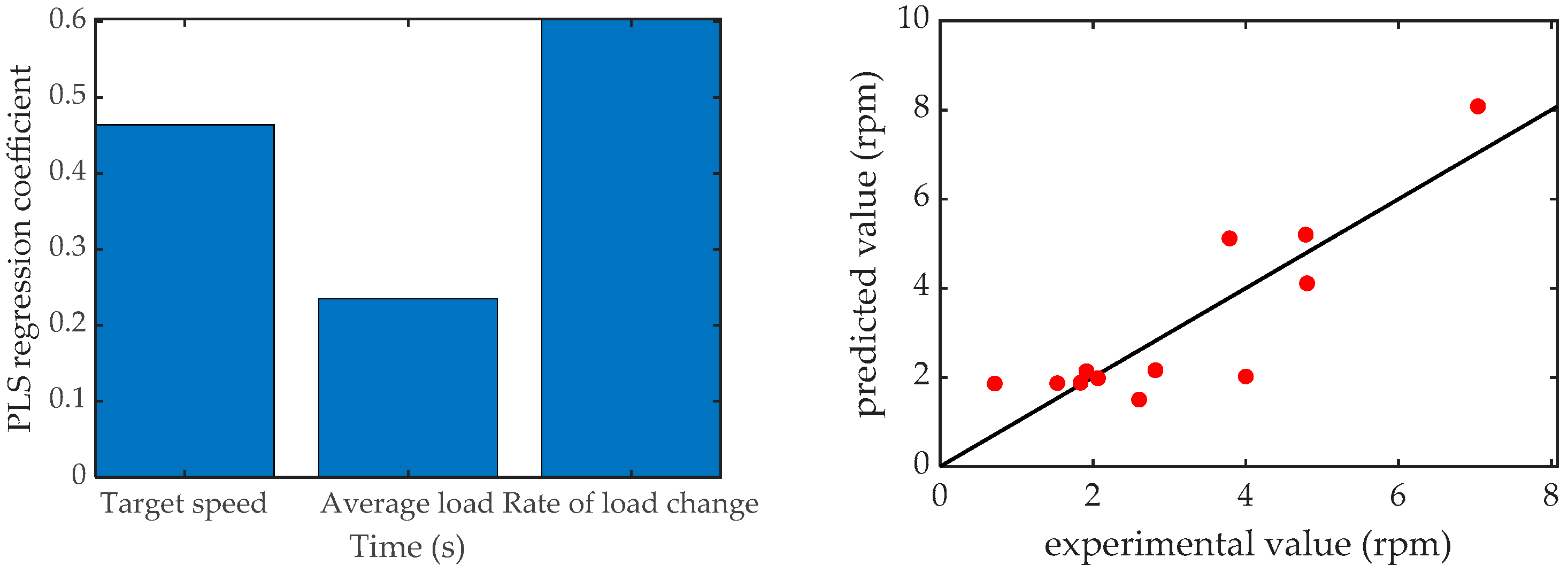
The paper proposes a denoising method combining the EMD, the GD-PDF-F and the skewness-kurtosis test. The research results show that the HST output speed signal tested should remove the first two orders of the IMF components. The rate of change of load torque has the biggest influence on the stability of the HST output speed, followed by the targe speed set, while the load torque has comparatively less influence on the HST output speed stability. It is recommended that the test and evaluation of the HST constant speed control performance of tractor should carefully consider the change of load torque in the future.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}