
An Octopus-Inspired Bionic Flexible Gripper for Apple Grasping



Abstract
:1. Introduction
2. Materials and Methods
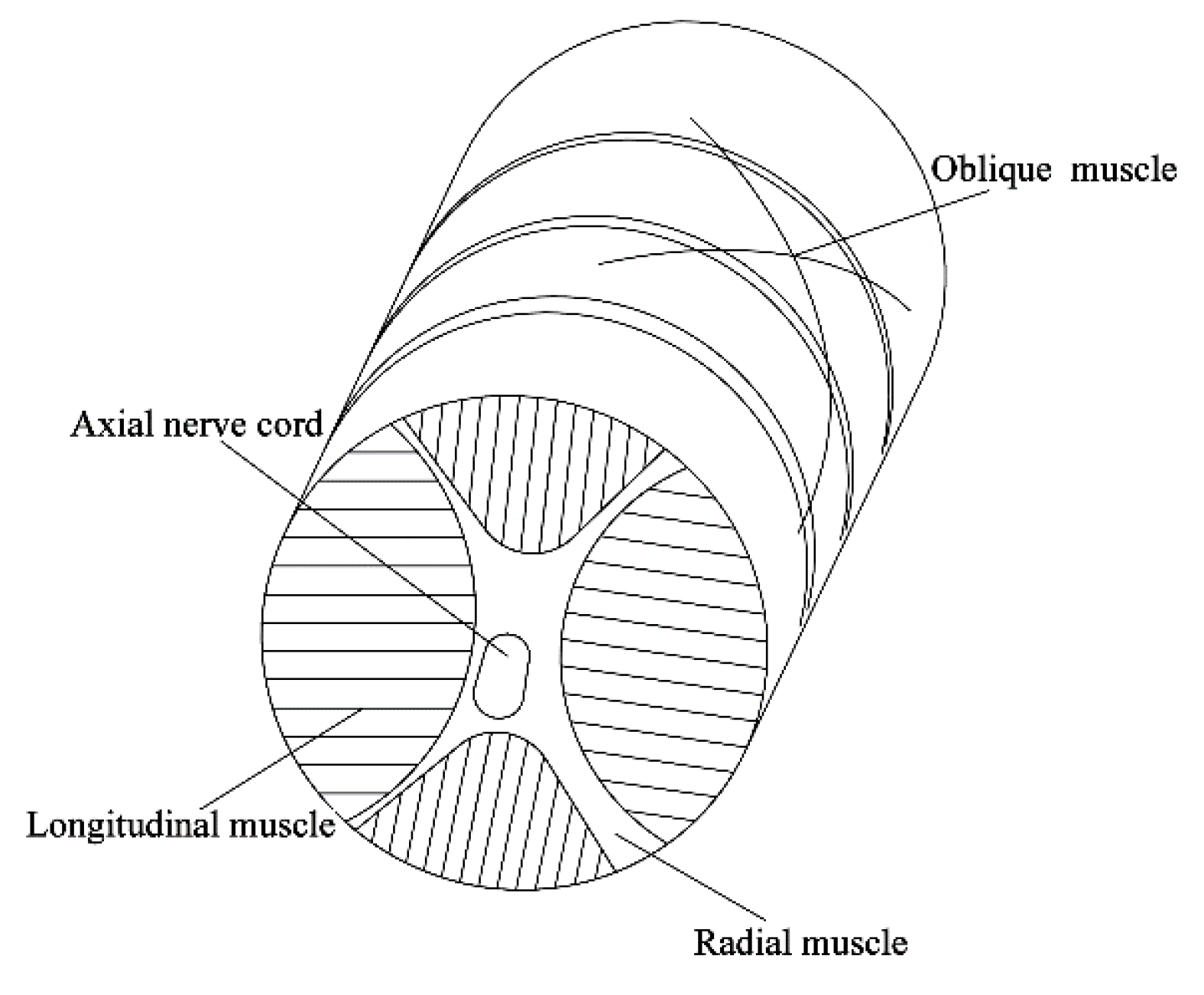
2.1. Analysis of the Tentacle Structure of Octopus
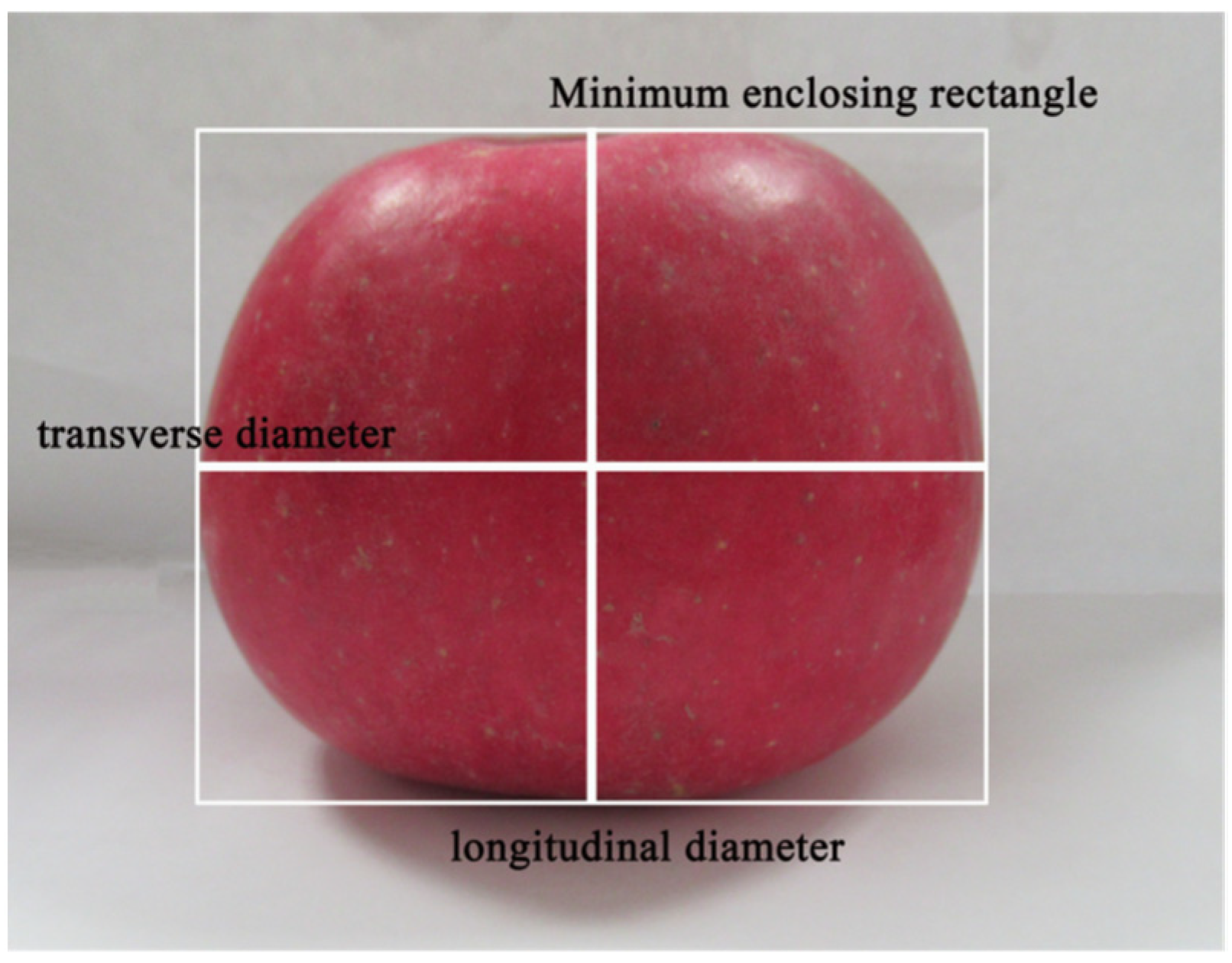
2.2. Analysis of Apple Morphology
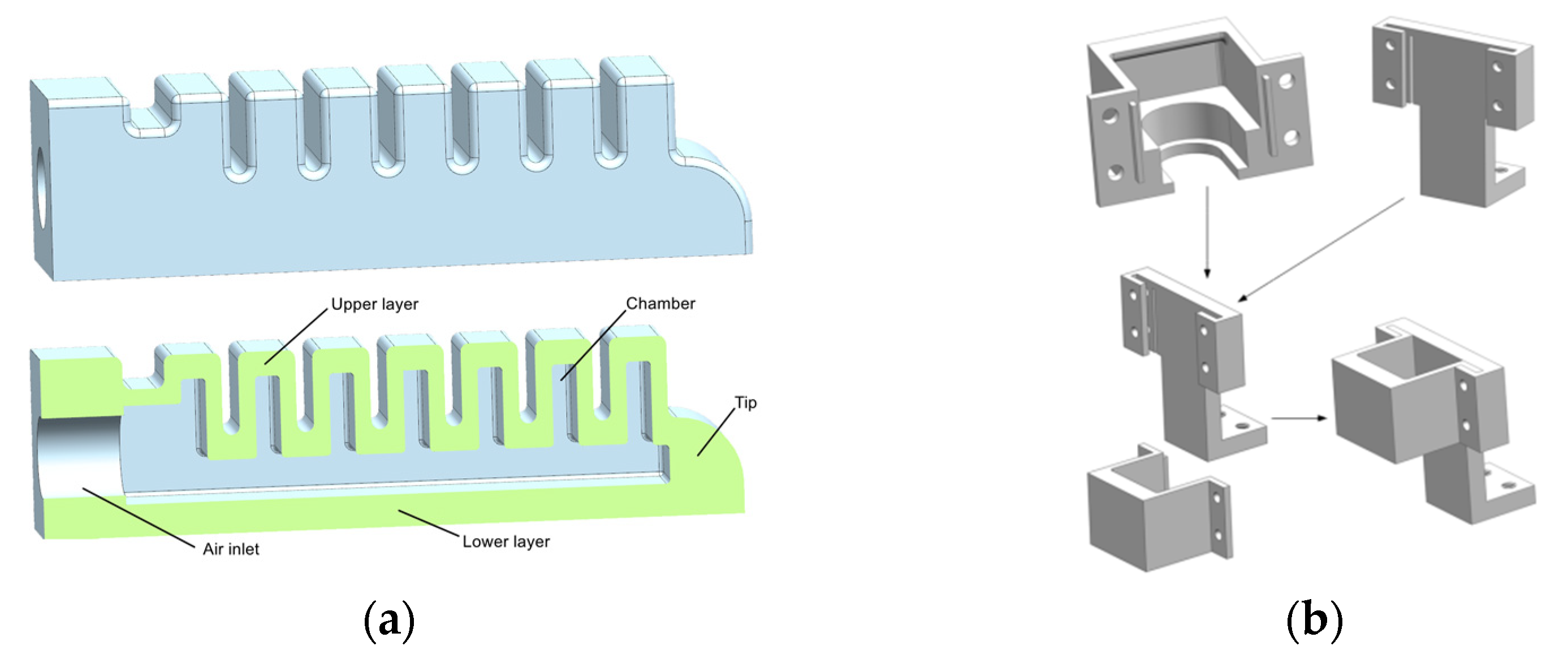
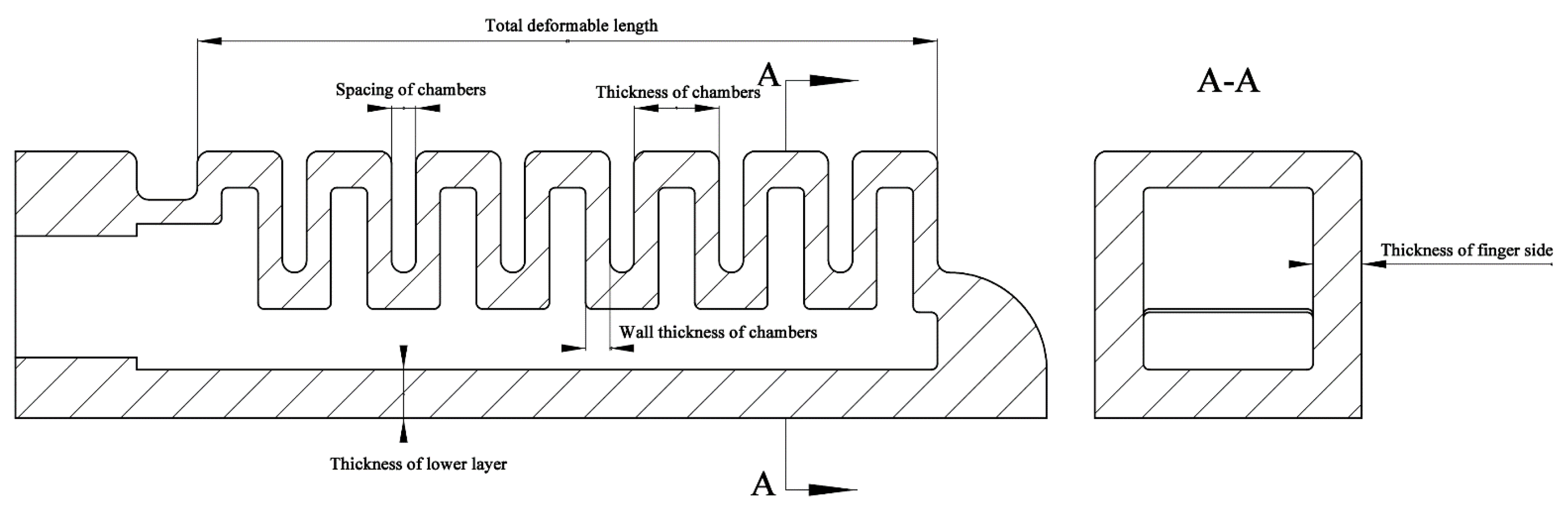
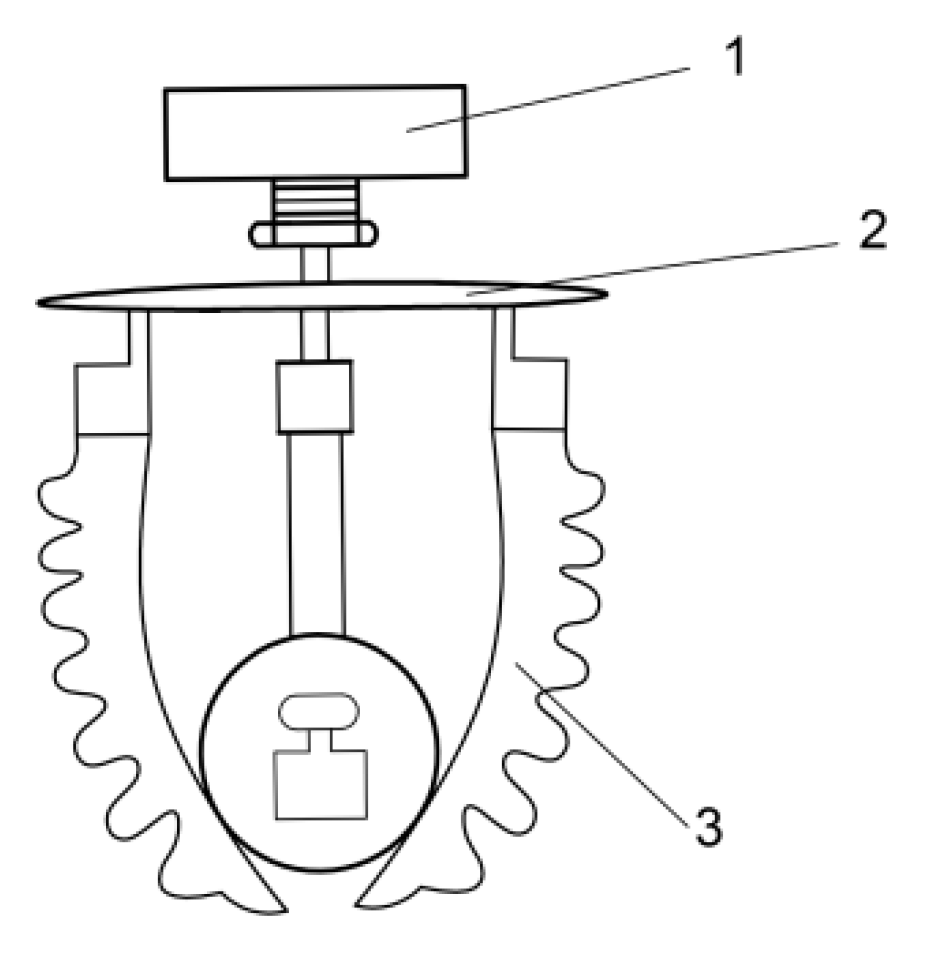
2.3. Design and Manufacture of a Single Flexible Finger
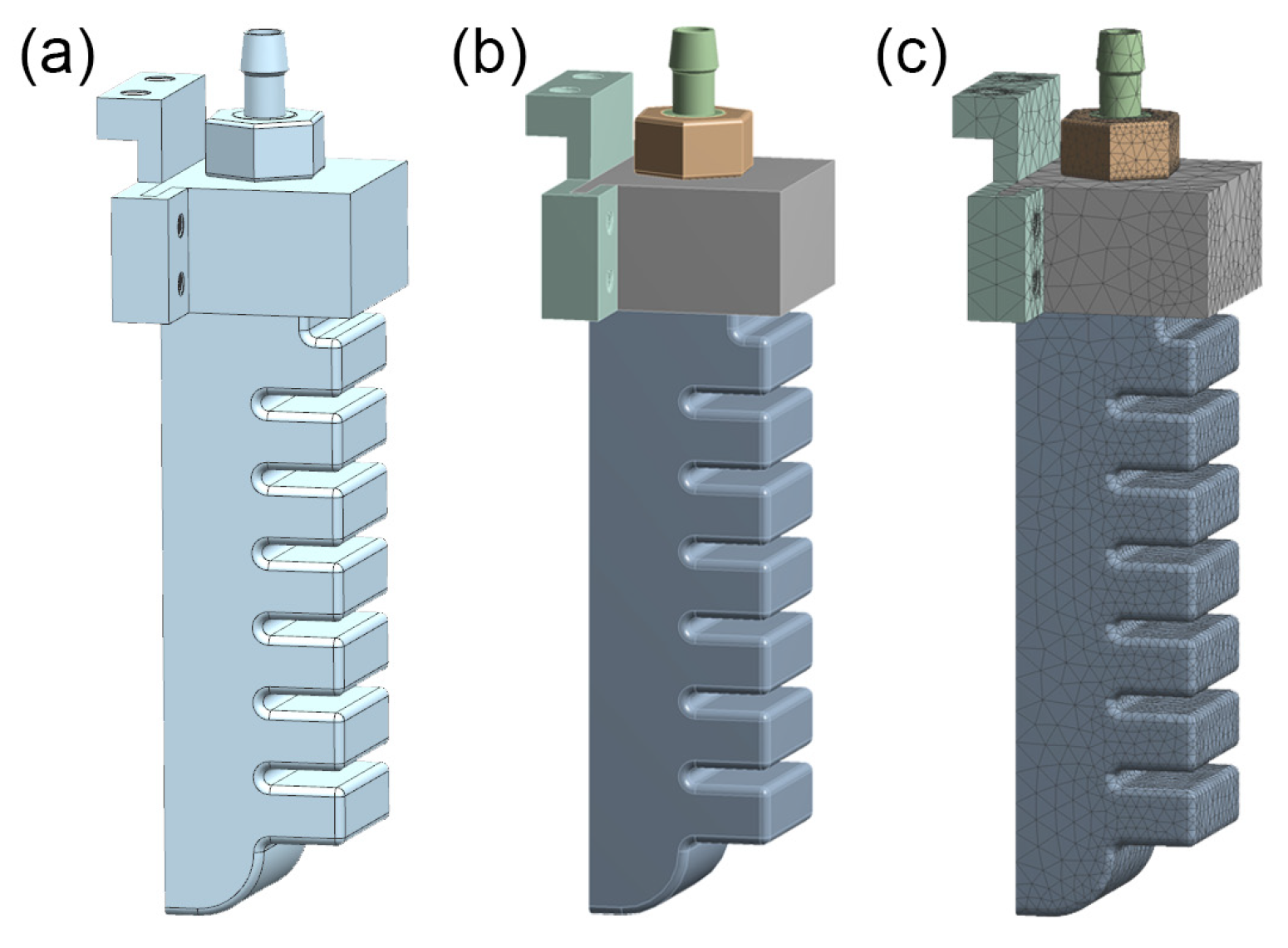
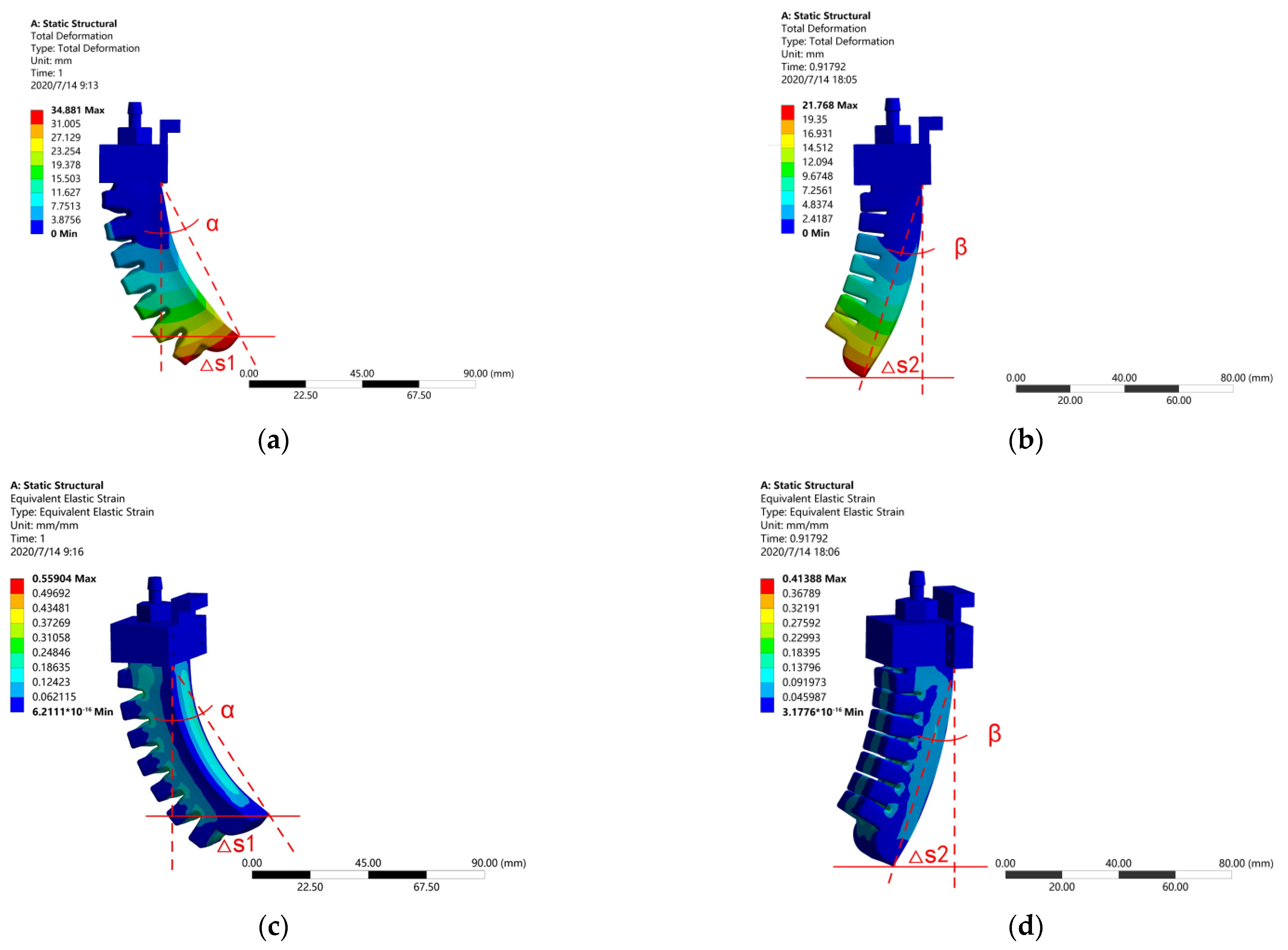
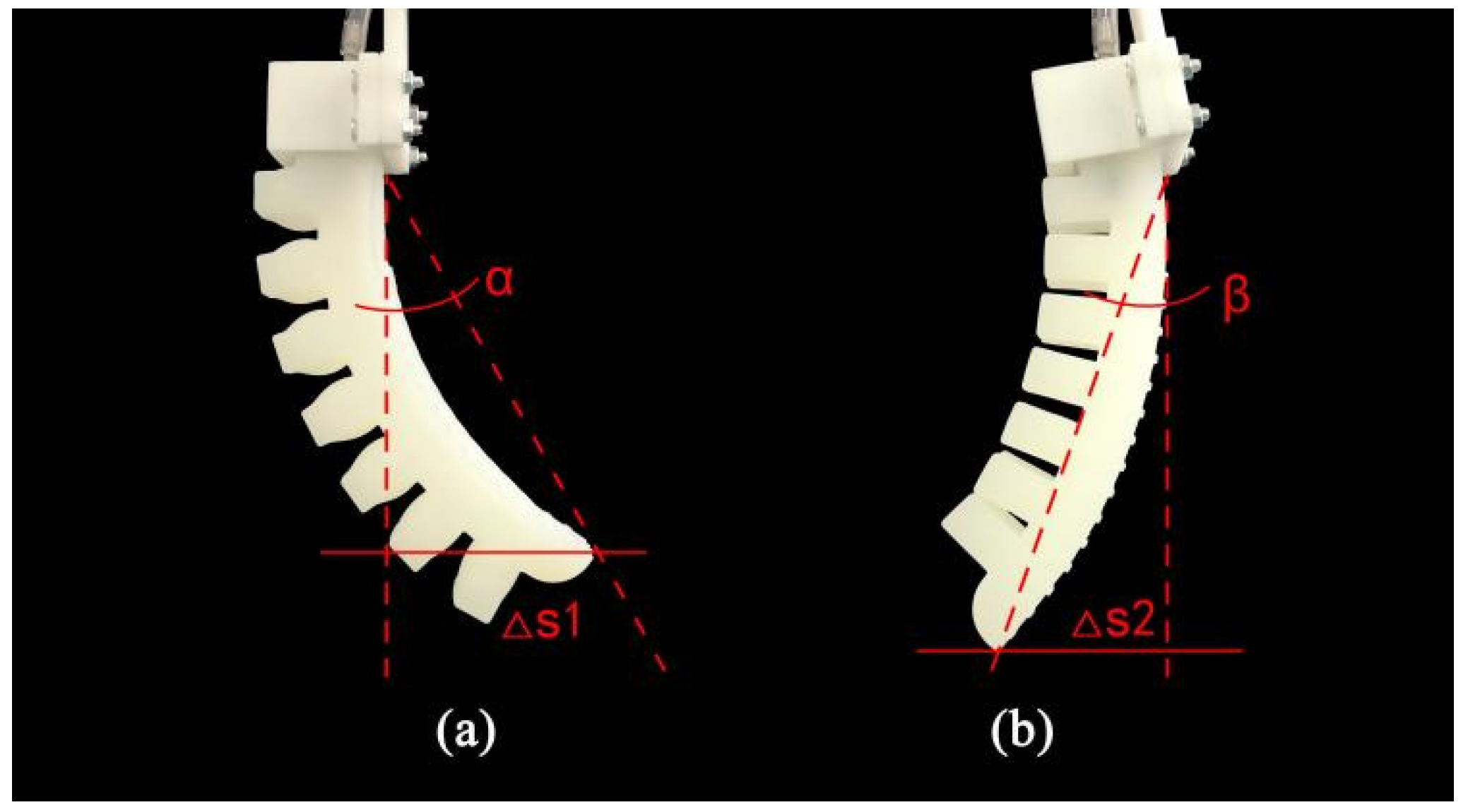
2.4. Finite-Element Analysis and Experimental Analysis of Flexible Finger
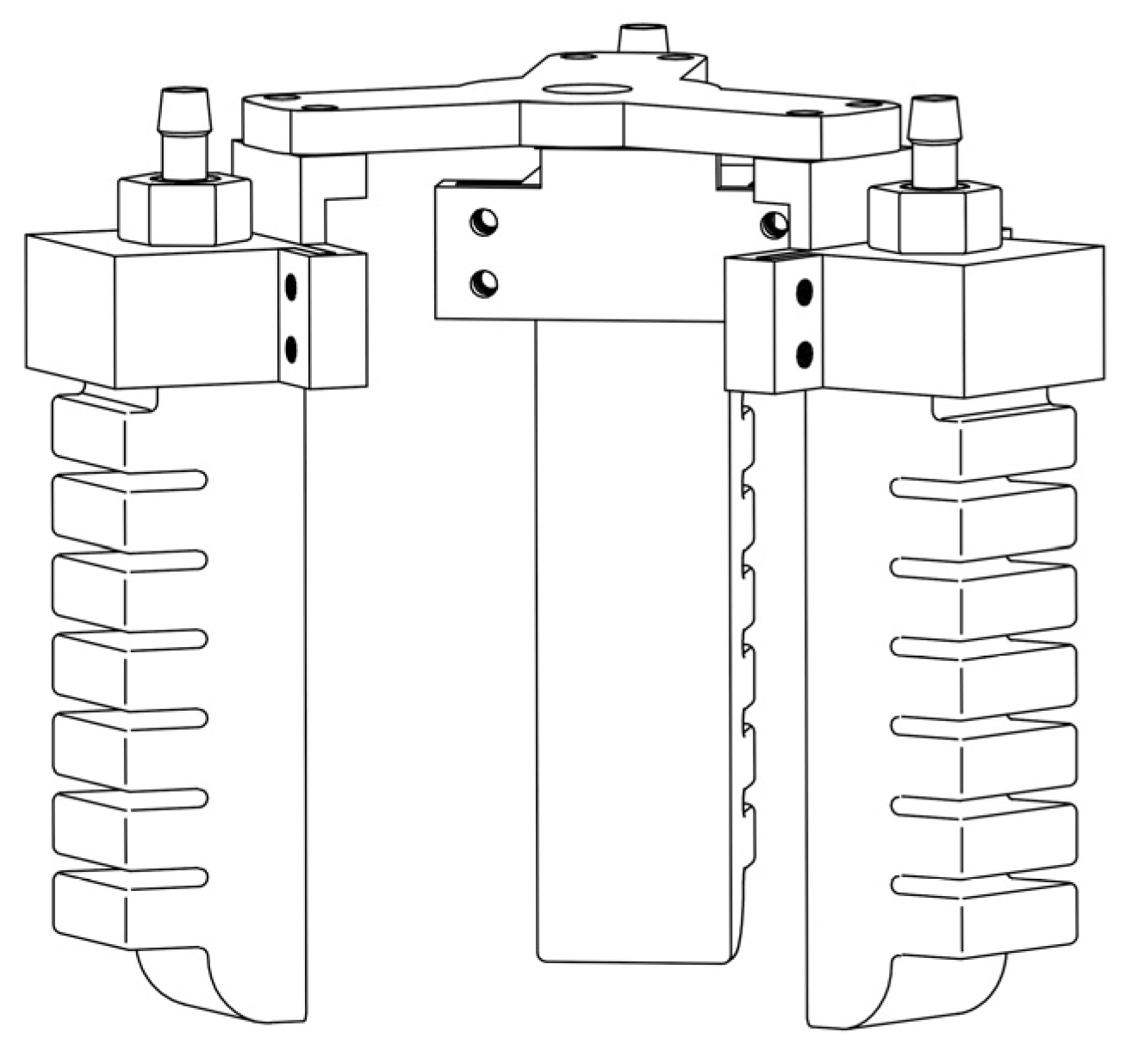
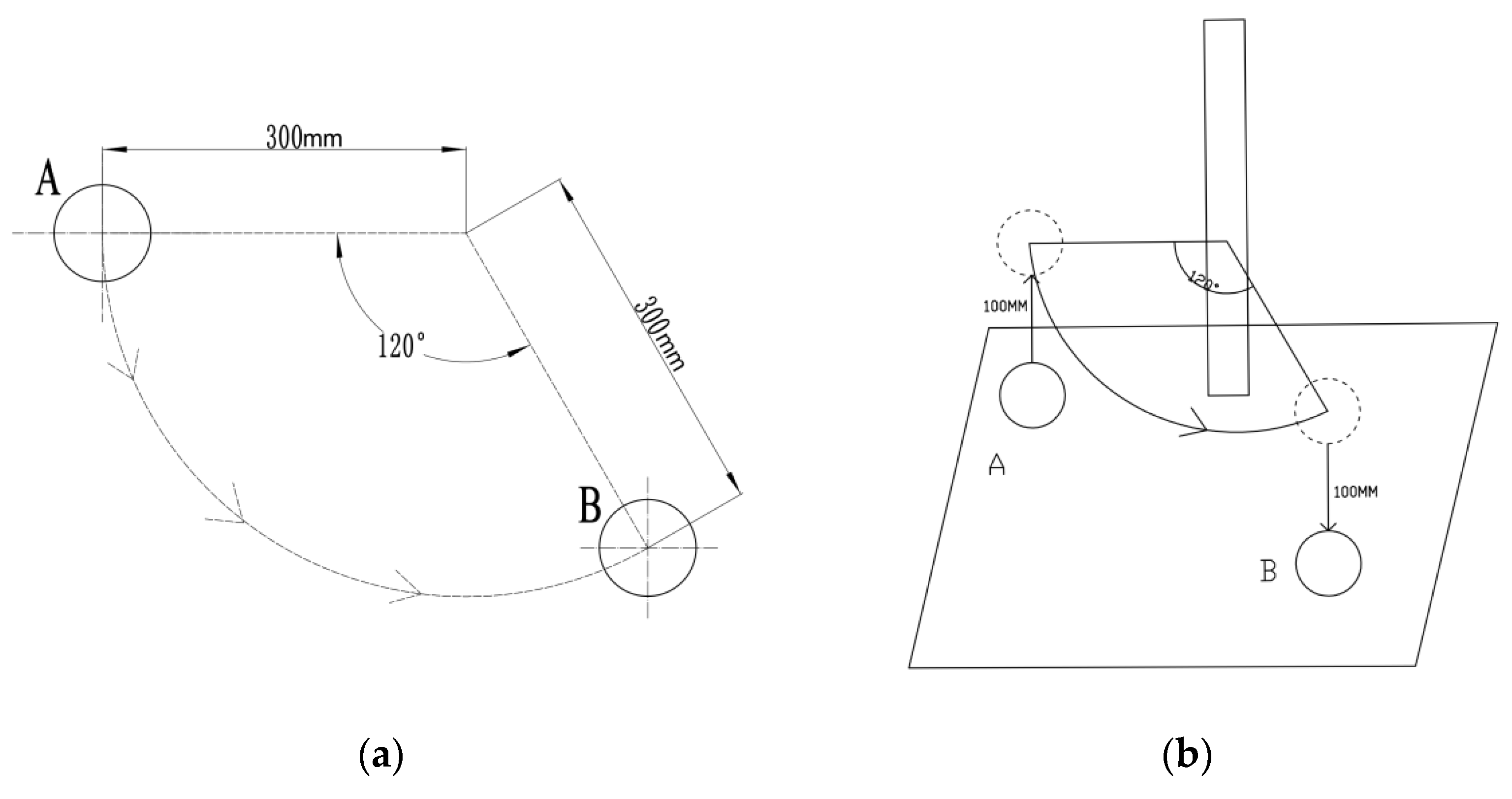
2.5. Experiment of Flexible Gripper
2.5.1. Experiment of Apple Grabbing
2.5.2. Experiment of Apple Damage
- (1)
- After completing the apple grab experiment, a 5× magnifying glass was used to observe whether there was any skin damage or juice overflow in the contact area between the apple and finger;
- (2)
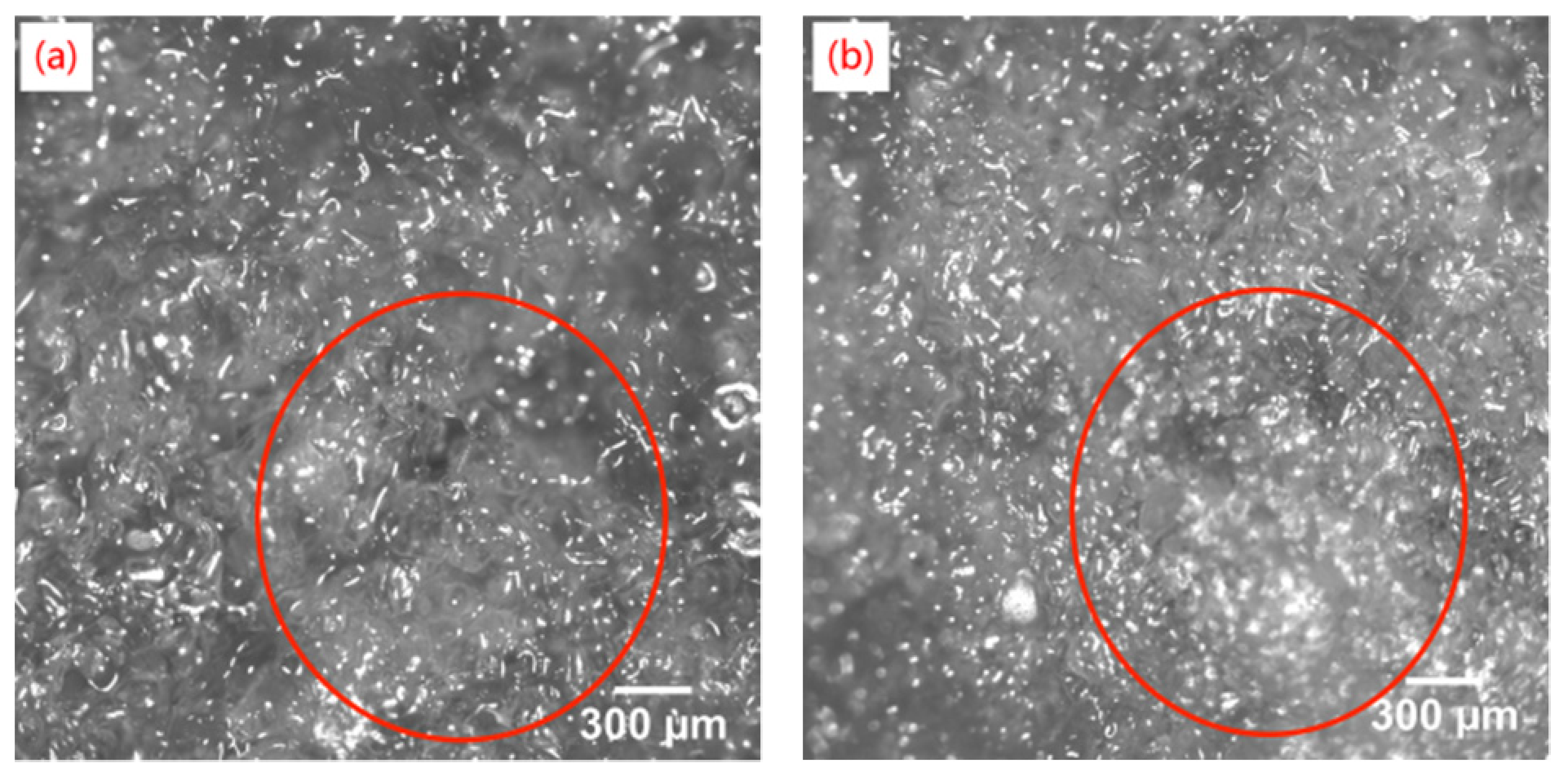
- The apple numbered 91 was selected, and grasped with a rigid claw. Subsequently, 10 apples were randomly selected from the successful grasping experiment. The surfaces which were touched by the finger were sliced respectively. The thickness was 2 mm, and placed under 5× microscope.
- (3)
- 20 apples were randomly selected from the successful grasping experiment, and 9 untested apples numbered 92–100 were stored in the same environment. The temperature was maintained at 25 °C, and the humidity at 80%. After seven days, the surface condition of the apples was observed. The contact area between the apple and finger was peeled to observe the internal pulp.
3. Results and Discussion
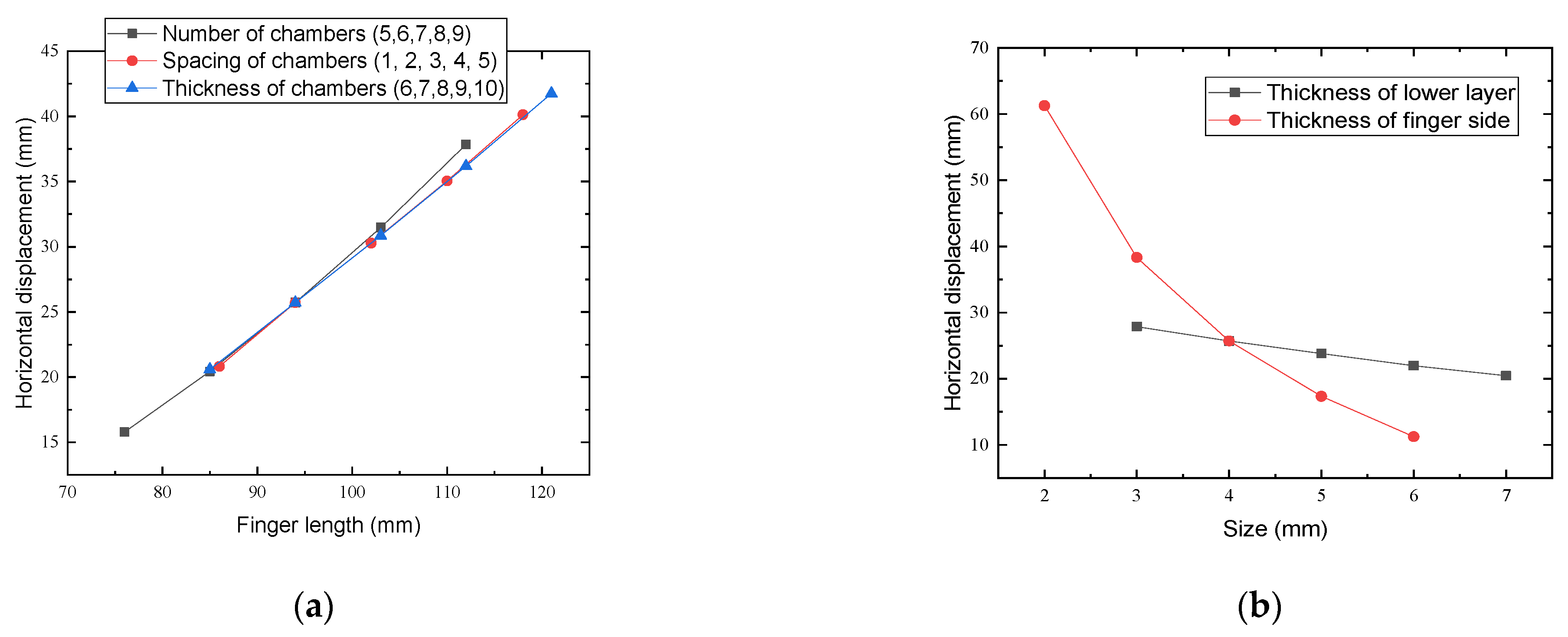
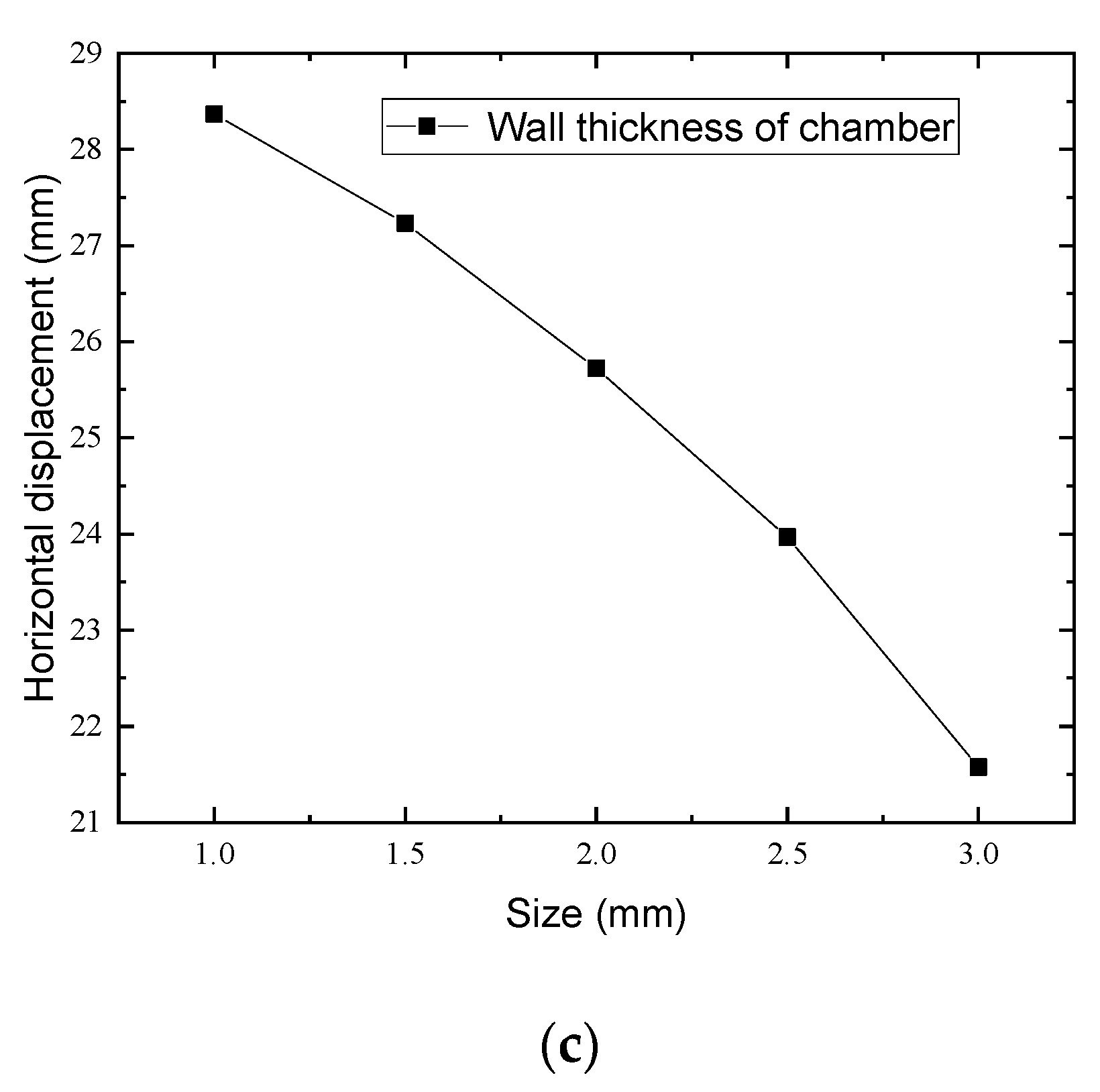
3.1. Simulation Results
3.2. Experiment Results and Analysis of Flexible Gripper
3.3. Experimental Results and Analysis for Apple Damage
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, J.J. Research on Design Methods of Flexible Grasping Devices with Variable Stiffness; University of Chinese Academy of Sciences: Beijing, China, 2019. [Google Scholar]
- Deng, X.L.; Luo, Z.W.; Pang, J.Q.; Zhang, Y.M.; Yang, C.J.; Li, R.Q. Design and experiment of bionic nondestructive handheld suction apple picker. J. China Agric. Univ. 2019, 24, 106–114. [Google Scholar]
- Ma, L.Z.; Yang, W.L.; Wang, C.J.; Chen, X.X.; Xue, C.; Lin, Y.Z.; Liu, A.R. Structure design and experiment of the end-effector for apple-harvesting robot. J. Agric. Mech. Res. 2009, 31, 65–67. [Google Scholar]
- Zhang, Q.L.; Ji, C.Y.; Gao, F.; Zhao, W.Y. Effect of apple picking manipulator on fruits damage. Sci. Technol. Food Ind. 2011, 32, 404–405. [Google Scholar]
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, L.; Follador, M.; Dario, P. Soft Robot Arm Inspired by the Octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Shen, Q.; Trabia, S.; Stalbaum, T.; Palmre, V.; Kim, K.; Oh, I. A multiple-shape memory polymer-metal composite actuator capable of programmable control, creating complex 3D motion of bending, twisting, and oscillation. Sci. Rep. 2016, 6, 24462. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cianchetti, M.; Calisti, M.; Margheri, L.; Kuba, M.; Laschi, C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspir. Biomim. 2015, 10, 035003. [Google Scholar] [CrossRef]
- Paek, J.; Cho, I.; Kim, J. Microrobotic tentacles with spiral bending capability based on shape-engineered elastomeric microtubes. Sci. Rep. 2015, 5, 10768. [Google Scholar] [CrossRef]
- Sun, Y.; Yap, H.K.; Liang, X.; Guo, J.; Qi, P.; Ang, M.H.; Yeow, C.H. Stiffness customization and ratterning for property Modulation of Silicone-Based Soft Pneumatic Actuators. Soft Robot. 2017, 4, 251–260. [Google Scholar] [CrossRef]
- Kashima, S.; Miyasaka, F.; Hirata, K. Novel soft actuator using magnetorheological elastomer. IEEE Trans. Magn. 2012, 48, 1649–1652. [Google Scholar] [CrossRef]
- Gafford, J.; Ding, Y.; Harris, A.; McKenna, T.; Polygerinos, P.; Holland, D.; Walsh, C.; Moser, A. Shape Deposition Manufacturing of a Soft, Atraumatic, and Deployable Surgical Grasper. J. Mech. Robot. 2015, 7, 021006. [Google Scholar] [CrossRef]
- Cho, K.-J.; Koh, J.-S.; Kim, S.; Chu, W.-S.; Hong, Y.; Ahn, S.-H. Review of manufacturing processes for soft biomimetic robots. Int. J. Precis. Eng. Manuf. 2009, 10, 171–181. [Google Scholar] [CrossRef]
- Bartlett, N.W.; Tolley, M.T.; Overvelde, J.T.B.; Weaver, J.C.; Mosadegh, B.; Bertoldi, K.; Whitesides, G.M.; Wood, R.J. A 3D-printed, functionally graded soft robot powered by combustion. Science 2015, 349, 161–165. [Google Scholar] [CrossRef] [Green Version]
- Morin, S.A.; Shepherd, R.F.; Kwok, S.W.; Stokes, A.A.; Nemiroski, A.; Whitesides, G.M. Camouflage and Display for Soft Machines. Science 2012, 337, 828–832. [Google Scholar] [CrossRef] [Green Version]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. Anintegrated design and fabrication strategy for entirelysoft autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.; Chen, X.; Whitesides, G.M. Soft Robotics for Chemists. Angew. Chem. Int. Ed. 2011, 50, 1890–1895. [Google Scholar] [CrossRef] [PubMed]
- Shepherda, R.F.; Ilievskia, F.; Choia, W.; Morina, S.A.; Stokesa, A.A.; Mazzeoa, A.D.; Chen, X.; Wanga, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Preter, A.D.; Anthonis, J.; Baerdemaeker, J.D. Development of a robot for harvesting strawberries. ScienceDirect 2018, 51, 14–19. [Google Scholar] [CrossRef]
- Hemming, J.; Van Tuijl, B.; Gauchel, W.; Wais, E. Field test of different end-effectors for robotic harvesting of sweet-pepper. Acta Hortic. 2016, 1130, 567–574. [Google Scholar] [CrossRef]
- Dimeas, F.; Sako, D.V.; Moulianitis, V.C.; Aspragathos, N.A. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotica 2015, 33, 1085–1098. [Google Scholar] [CrossRef]
- Yaguchi, H.; Nagahama, K.; Hasegawa, T.; Inaba, M. Development of an autonomous tomato harvesting robot with rotational plucking gripper. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; Volume 9, pp. 652–657. [Google Scholar] [CrossRef]
- Glick, P.; Suresh, S.A.; Ruffatto, D.; Cutkosky, M.; Tolley, M.T.; Parness, A. A Soft Robotic Gripper with Gecko-Inspired Adhesive. IEEE Robot. Autom. Lett. 2018, 3, 903–910. [Google Scholar] [CrossRef]
- Takahashi, T.; Kikuchi, S.; Suzuki, M.; Aoyagi, S. Octopus-bioinspired Vacuum Gripper with Micro Bumps. J. Robot. Soc. Jpn. 2017, 35, 62–69. [Google Scholar] [CrossRef] [Green Version]
- Tomokazu, T.; Kikuchi, S.; Suzuki, M.; Aoyagi, S. Vacuum gripper imitated octopus sucker-effect of liquid membrane for absorption. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 2929–2936. [Google Scholar]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef] [Green Version]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, e1707035. [Google Scholar] [CrossRef] [Green Version]
- Abundant Robotics. Apple-Picking Robot Prepares to Competer for Farm Jobs. [EB/OL] 2017, 5, 8. Available online: https://www.sohu.com/a/139050700_355045 (accessed on 23 August 2021).
- Ma, S.C.; Xie, R.P.; Huang, Q.; Liu, M. Experimental study on the interaction force between ground-wheel and soil of dibble-type transplanter. J. Agric. Mech. Res. 2018, 40, 158–161, 166. [Google Scholar]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Wang, T.; Wen, L. A Soft Bionic Gripper with Variable Effective Length. J. Bionic Eng. 2018, 15, 220–235. [Google Scholar] [CrossRef]
- Hao, Y.; Wang, T.; Ren, Z.; Gong, Z.; Wang, H.; Yang, X.; Guan, S.; Wen, L. Modeling and experiments of a soft robotic gripper in amphibious environments. Int. J. Adv. Robot. Syst. 2017, 14, 14. [Google Scholar] [CrossRef]
- Mazzolai, B.; Laschi, C.; Cianchetti, M.; Patane, F.; Bassi-Luciani, L.; Izzo, I.; Dario, P. Biorobotic Investigation on the Muscle Structure of an Octopus Tentacle. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Montréal, QC, Canada, 20–24 July 2007; Volume 2007, pp. 1471–1474. [Google Scholar]
- Tramacere, F.; Beccai, L.; Sinibaldi, E.; Laschi, C.; Mazzolai, B. Adhesion Mechanisms Inspired by Octopus Suckers. Procedia Comput. Sci. 2011, 7, 192–193. [Google Scholar] [CrossRef] [Green Version]
- Yekutieli, Y.; Sagiv-Zohar, R.; Aharonov, R.; Engel, Y.; Hochner, B.; Flash, T. Dynamic Model of the Octopus Arm. I. Biomechanics of the Octopus Reaching Movement. J. Neurophysiol. 2005, 94, 1443–1458. [Google Scholar] [CrossRef] [PubMed]
- Gutfreund, Y.; Flash, T.; Fiorito, G.; Hochner, B. Patterns of Arm Muscle Activation Involved in Octopus Reaching Movements. J. Neurosci. 1998, 18, 5976–5987. [Google Scholar] [CrossRef] [Green Version]
- Kier, W.M.; Smith, K.K. Tongues, tentacles and trunks: The biomechanics of movement in muscular-hydrostats. Zool. J. Linn. Soc. 1985, 83, 307–324. [Google Scholar] [CrossRef]
- Yekutieli, Y.; Sagiv-Zohar, R.; Hochner, B.; Flash, T. Dynamic Model of the Octopus Arm. II. Control of Reaching Movements. J. Neurophysiol. 2005, 94, 1459–1468. [Google Scholar] [CrossRef] [PubMed]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-De-Santos, P. Soft Grippers for Automatic Crop Harvesting: A Review. Sensors 2021, 21, 2689. [Google Scholar] [CrossRef] [PubMed]
- Chang, L.; Na, L.; Ja, L. Dynamic simulation analysis of ADAMS on pneumatic flexible strawberry picking manipulator. Chin. Sci. Pap. 2017, 12, 390–393. [Google Scholar]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A recipe for soft fluidic elastomer robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef] [PubMed] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicators | Quality m/g | Vertical Axis Diameter Dva/mm | Horizontal Axis Diameter Dha/mm | Fruit Shape Index Dva/Dha | Minimum Enclosing Rectangle A * b(mm) |
|---|---|---|---|---|---|
| Maximum | 350.0 | 75.0 | 99.0 | 0.76 | 75 * 99 |
| Minimum | 246.5 | 69.0 | 82.0 | 0.94 | 69 * 82 |
| Average | 288.2 | 74.5 | 86.9 | 0.86 | — |
| Standard deviation | 24.8 | 3.7 | 3.2 | 0.05 | — |
| Coefficient of variation | 0.09 | 0.05 | 0.04 | 0.05 | — |
| Name | Material Type | Density/(kg·m−3) | Other Parameters | ||
|---|---|---|---|---|---|
| Flexible fingers | Flexible | 1.08 × 109 | μ1 = 0.264 MPa | α1 = 3.0158 | D1 = 0 |
| Fixed structure | Fixed | 7850 | Modulus of elasticity: 2 × 105 MPa | Poisson’s ratio: 0.3 | |
| Number of Chambers/Units | Spacing of Chambers/mm | Thickness of Chambers/ mm | Total Length/ mm | Horizontal Displacement of Finger End/ mm |
|---|---|---|---|---|
| 7 | 2 | 7 | 76 | 15.791 |
| 8 | 2 | 7 | 85 | 20.434 |
| 9 | 2 | 7 | 94 | 25.719 |
| 10 | 2 | 7 | 103 | 31.468 |
| 11 | 2 | 7 | 112 | 37.841 |
| 7 | 1 | 7 | 86 | 20.824 |
| 7 | 2 | 7 | 94 | 25.719 |
| 7 | 3 | 7 | 102 | 30.286 |
| 7 | 4 | 7 | 110 | 35.053 |
| 7 | 5 | 7 | 118 | 40.131 |
| 7 | 2 | 6 | 85 | 20.824 |
| 7 | 2 | 7 | 94 | 25.719 |
| 7 | 2 | 8 | 103 | 30.286 |
| 7 | 2 | 9 | 112 | 35.053 |
| 7 | 2 | 10 | 121 | 40.131 |
| Thickness of Lower Layer/ mm | Thickness of Finger Side/ mm | Wall Thickness of Chambers/ mm | Horizontal Displacement of Finger End/ mm |
|---|---|---|---|
| 3 | 4 | 1.5 | 27.882 |
| 4 | 4 | 1.5 | 25.719 |
| 5 | 4 | 1.5 | 23.814 |
| 6 | 4 | 1.5 | 21.977 |
| 7 | 4 | 1.5 | 20.467 |
| 4 | 2 | 1.5 | 20.824 |
| 4 | 3 | 1.5 | 25.719 |
| 4 | 4 | 1.5 | 30.286 |
| 4 | 5 | 1.5 | 35.053 |
| 4 | 6 | 1.5 | 40.131 |
| 4 | 4 | 1.0 | 20.824 |
| 4 | 4 | 1.5 | 25.719 |
| 4 | 4 | 2.0 | 30.286 |
| 4 | 4 | 2.5 | 35.053 |
| 4 | 4 | 3.0 | 40.131 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pi, J.; Liu, J.; Zhou, K.; Qian, M. An Octopus-Inspired Bionic Flexible Gripper for Apple Grasping. Agriculture 2021, 11, 1014. https://doi.org/10.3390/agriculture11101014
Pi J, Liu J, Zhou K, Qian M. An Octopus-Inspired Bionic Flexible Gripper for Apple Grasping. Agriculture. 2021; 11(10):1014. https://doi.org/10.3390/agriculture11101014
Chicago/Turabian StylePi, Jie, Jun Liu, Kehong Zhou, and Mingyan Qian. 2021. "An Octopus-Inspired Bionic Flexible Gripper for Apple Grasping" Agriculture 11, no. 10: 1014. https://doi.org/10.3390/agriculture11101014