Autonomous Mowing and Turf-Type Bermudagrass as Innovations for An Environment-Friendly Floor Management of a Vineyard in Coastal Tuscany

 , , , , , , ,
, , , , , , ,
Abstract
:1. Introduction
2. Materials and Methods
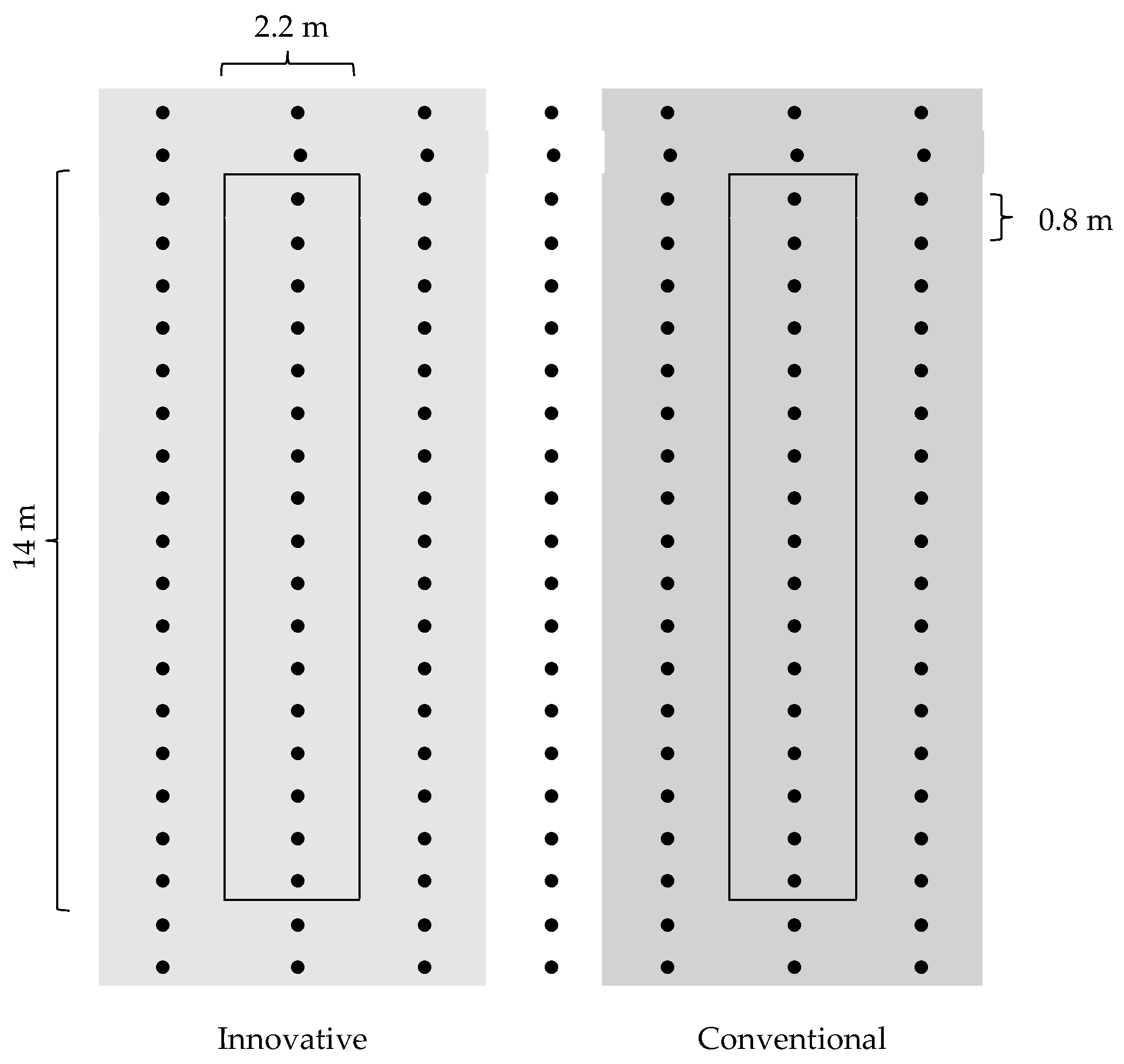
2.1. Conventional Floor Management
- a disc harrow with a working width of 150 cm (mod. PSME/P 17 16-51 Spedo Srl, Badia Polesine, Rovigo, Italy),
- a rotary harrow with a working width of 130 cm (mod. DL 1300 Maschio Gaspardo, Campodarsego, Padova, Italy),
- a flail mower with a working width of 135 cm (mod.SM135 Spedo Srl, Badia Polesine, Rovigo, Italy),
- a sprayer equipped with a 180-cm-wide spray bar (mod. PrM 800PBX Agri Perrone, Guagnano, Lecce, Italy) and
- an on-the-row mechanical weeder equipped with two lateral blades (mod. Expo Doppio H2 Arrizza Srl, Fossacesia, Chieti, Italy).
2.2. Innovative Floor Management
2.3. Assessments
2.3.1. Ground Cover
2.3.2. Energy Consumption
2.3.3. CO2 Emissions
2.3.4. Grapevine Assessments
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Corbo, C.; Lamastra, L.; Capri, E. From Environmental to Sustainability Programs: A Review of Sustainability Initiatives in the Italian Wine Sector. Sustainability 2014, 6, 2133–2159. [Google Scholar] [CrossRef] [Green Version]
- Jones, G.V. Sustainable vineyard developments worldwide. In Proceedings of the XXXIV Congress of Vine and Wine, Porto, Portugal, 20–27 June 2011. [Google Scholar]
- Qian, X.; Gu, J.; Pan, H.J.; Zhang, K.Y.; Sun, W.; Wang, X.J.; Gao, H. Effects of living mulches on the soil nutrient contents, enzyme activities, and bacterial community diversities of apple orchard soils. Eur. J. Soil Biol. 2015, 70, 23–30. [Google Scholar]
- Hartwig, N.L.; Ammon, H.U. Cover crops and living mulches. Weed Sci. 2002, 50, 688–699. [Google Scholar] [CrossRef]
- Song, B.Z.; Zhang, J.; Hu, J.H.; Wu, H.Y.; Kong, Y.; Yao, Y.C. Temporal dynamics of the arthropod community in pear orchards intercropped with aromatic plants. Pest Manag. Sci. 2011, 67, 1107–1114. [Google Scholar]
- Guerra, B.; Steenwerth, K. Influence of floor management technique on grapevine growth, disease pressure, and juice and wine composition: A Review. Am. J. Enol. Vitic. 2012, 63, 149–164. [Google Scholar] [CrossRef]
- De Castro, A.I.; Peña, J.M.; Torres-Sánchez, J.; Jiménez-Brenes, F.; López-Granados, F. Mapping Cynodon dactylon in vineyards using UAV images for site-specific weed control. Adv. Anim. Biosci. Precis. Agric. ECPA 2017, 8, 267–271. [Google Scholar] [CrossRef]
- Pardini, A.; Faiello, C.; Longhi, F.; Mancuso, S.; Snowball, R. Cover crop species and their management in vineyards and olive groves. Adv. Hortic. Sci. 2002, 16, 225–234. [Google Scholar]
- Grossi, N.; Gaetani, M.; Volterrani, M.; Pardini, G.; Scalabrelli, G. L’inerbimento del vigneto: Un triennio di sperimentazione in un ambiente della Maremma toscana. Rivista Agron. 2000, 34, 41–47. [Google Scholar]
- Garcia, L.; Celettec, F.; Gary, C.; Ripoche, A.; Valdés-Gómez, H.; Metay, A. Management of service crops for the provision of ecosystem services in vineyards: A review. Agr. Ecosyst. Environ. 2018, 251, 158–170. [Google Scholar] [CrossRef] [Green Version]
- Novara, A.; Cerdà, A.; Gristina, L. Sustainable vineyard floor management: An equilibrium between water consumption and soil conservation. Curr. Opin. Environ. Sci. Health 2018, 5, 33–37. [Google Scholar] [CrossRef]
- Baumgartner, K.; Steenwerth, K.L.; Veilleux, L. Cover-crop systems affect weed communities in a California vineyard. Weed Sci. 2008, 56, 596–605. [Google Scholar] [CrossRef]
- Mercenaro, L.; Nieddu, G.; Pulina, P.; Porqueddu, C. Sustainable management of an intercropped Mediterranean vineyard. Agr. Ecosyst. Environ. 2014, 192, 95–104. [Google Scholar] [CrossRef]
- Caturegli, L.; Lulli, F.; Foschi, L.; Guglielminetti, L.; Bonari, E.; Volterrani, M. Turfgrass spectral reflectance: Simulating satellite monitoring of spectral signatures of main C3 and C4 species. Precis. Agric. 2015, 16, 297–310. [Google Scholar] [CrossRef]
- Taliaferro, C.M. Bermudagrass. In Turfgrass Biology, Genetics, and Breeding; Casler, M.D., Duncan, R.R., Eds.; Wiley & Sons, Inc.: Haboken, NY, USA, 2003. [Google Scholar]
- Magni, S.; Gaetani, M.; Caturegli, L.; Leto, C.; Tuttolomondo, T.; La Bella, S.; Virga, G.; Ntoulas, N.; Volterrani, M. Phenotypic traits and establishment speed of 44 turf bermudagrass accessions. Acta Agr. Scand. 2014, 64, 722–733. [Google Scholar] [CrossRef]
- Celette, F.; Wery, J.; Chantelot, E.; Celette, J.; Gary, C. Belowground interaction in a vine (Vitis vinifera L.)-tall fescue (Festuca arundinacea Shreb.) intercropping system: Water relations and growth. Plant Soil 2005, 276, 205–217. [Google Scholar] [CrossRef]
- Celette, F.; Gaudin, R.; Gary, C. Spatial and temporal changes to the water regime of a Mediterranean vineyard due to the adoption of cover cropping. Eur. J. Agron. 2008, 29, 153–162. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Labanca, F.; Sportelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; et al. Energetic aspects of turfgrass mowing: Comparison of different rotary mowing systems. Agriculture 2019, 9, 178. [Google Scholar] [CrossRef] [Green Version]
- Grossi, N.; Fontanelli, M.; Garramone, E.; Peruzzi, A.; Raffaelli, M.; Pirchio, M.; Martelloni, L.; Frasconi, C.; Caturegli, L.; Gaetani, M.; et al. Autonomous mower saves energy and improves quality of tall fescue lawn. HortTechnology 2016, 26, 825–830. [Google Scholar] [CrossRef] [Green Version]
- Hicks, R.W.; Hall, E.L. Survey of robot lawn mowers. In Proceedings SPIE 4197, Intelligent Robots and Computer Vision XIX: Algorithms, Techniques, and Active Vision; Society of Photo-Optical Instrumentation Engineers (SPIE): Boston, MA, USA, 2000; pp. 262–269. [Google Scholar]
- Ragonese, A.; Marx, J. The applications of sensor technology in the design of the autonomous robotic lawn mower, Paper No. 5094. In Proceedings of the 15th Annual Freshman Engineering Conference, Pittsburgh, PA, USA, 11 April 2015. [Google Scholar]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Caturegli, L.; Gaetani, M.; Magni, S.; Volterrani, M.; et al. Autonomous rotary mower versus ordinary reel mower-effects of cutting height and nitrogen rate on manila grass turf quality. HortTechnology 2018, 28, 509–515. [Google Scholar] [CrossRef] [Green Version]
- Sportelli, M.; Pirchio, M.; Fontanelli, M.; Volterrani, M.; Frasconi, C.; Martelloni, L.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, M.; et al. Autonomous mowers working in narrow spaces: A possible future application in agriculture? Agronomy 2020, 10, 553. [Google Scholar] [CrossRef] [Green Version]
- MacLaren, C.; Bennett, J.; Dehnen-Schmutz, K. Management practices influence the competitive potential of weed communities and their value to biodiversity in South African vineyards. Weed Res. 2019, 59, 93–106. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; Caturegli, L.; Volterrani, M.; et al. Autonomous mower vs. rotary mower: Effects on turf quality and weed control in tall fescue lawn. Agronomy 2018, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Volterrani, M.; Grossi, N.; Lulli, F.; Gaetani, M. Establishment of warm-season turfgrass species by transplant of single potted plants. Acta Hort. 2008, 783, 77–84. [Google Scholar] [CrossRef]
- Husqvarna. Husqvarna Automower 105/310/315/320/330X/420/430X/450X Operator’s Manual. Available online: http://www.husqvarna.com/uk/support/manuals-downloads/ (accessed on 27 April 2020).
- Morris, K.N.; Shearman, R.C. NTEP Turfgrass Evaluation Guidelines. 2018. Available online: http://www.ntep.org/pdf/ratings (accessed on 27 April 2020).
- ISPRA—Istituto Superiore per la Protezione e la Ricerca Ambientale. Rapporti 280/2018. Available online: http://www.isprambiente.gov.it/it/pubblicazioni/rapporti/fattori-di-emissione-in-atmosfera-di-gasa-effetto-serra-e-altri-gas-nel-settore-elettrico (accessed on 27 April 2020).
- Hoepli, Manuali Hoepli.it. 2019. Available online: http://www.manualihoepli.it/media/doc/pr243.pdf (accessed on 27 April 2020).
- ISPRA—Istituto Superiore per la Protezione e la Ricerca Ambientale. Italian Greenhouse Gas Inventory 1990–2015. National Inventory Report 2017. Available online: http://www.isprambiente.gov.it/files2017/pubblicazioni/rapporto/R_261_17.pdf (accessed on 27 April 2020).
- Martelloni, L.; Fontanelli, M.; Pieri, S.; Frasconi, C.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; Pirchio, M.; Raffaelli, M.; et al. Assessment of the cutting performance of a robot mower using custom built software. Agronomy 2019, 9, 230. [Google Scholar] [CrossRef] [Green Version]
- Slaughter, D.; Giles, D.K.; Downey, D. Autonomous robotic weed control systems: A review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
- Ripoche, A.; Metay, A.; Celette, F.; Gary, C. Changing the soil surface management in vineyards: Immediate and delayed effects on the growth and yield of grapevine. Plant Soil 2011, 339, 259–271. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Parameter | Method | Unit | Value |
|---|---|---|---|
| Sand (20–2000 µm) | Hydrometer ISSS | % | 84.4 |
| Loam (2–20 µm) | Hydrometer ISSS | % | 8.1 |
| Clay (<2 µm) | Hydrometer ISSS | % | 7.5 |
| pH | Extract 1:2.5 | 7.1 | |
| Organic Matter | Walkley-Black | % | 1.2 |
| Total Nitrogen | Kjeldahl | ‰ | 0.9 |
| C/N | 7.6 | ||
| Assimilable Phosphorus | Olsen | P2O5 ppm | 99 |
| Exchangeable Potassium | BaCl2 | K2O ppm | 535 |
| Operation | Average Duration (h ha−1) | Number of Operations Per Year |
|---|---|---|
| 2018 | ||
| Flail Mowing | 1.53 | 3 |
| Herbicide | 1.40 | 1 |
| Rotary Harrowing | 2.21 | 1 |
| 2019 | ||
| Mowing | 1.38 | 4 |
| Herbicide | 1.45 | 2 |
| Rotary Harrowing | 2.13 | 2 |
| Disc Harrowing | 1.33 | 1 |
| Mechanical Intrarow weeding | 1.50 | 1 |
| Management System | Ground Cover Percentage (%) | |||||
|---|---|---|---|---|---|---|
| 2018 | 2019 | |||||
| Total | Resident 1 | Bermuda 2 | Total | Resident 1 | Bermuda 2 | |
| 22 May | 15 May | |||||
| Conventional | 35 | 35 | na | 25 | 25 | na |
| Innovative | 60 | 58 | 2 | 74 | 35 | 39 |
| LSD (0.05) | 10 | 18 | - | 9 | ns | - |
| 20 June | 12 June | |||||
| Conventional | 12 | 12 | na | 15 | 15 | na |
| Innovative | 62 | 55 | 7 | 69 | 20 | 49 |
| LSD (0.05) | 7 | 10 | - | 11 | ns | - |
| 25 July | 10 July | |||||
| Conventional | 38 | 38 | na | 28 | 28 | na |
| Innovative | 63 | 45 | 18 | 73 | 15 | 58 |
| LSD (0.05) | 12 | ns | - | 10 | ns | - |
| 10 August | 12 August | |||||
| Conventional | 51 | 51 | na | 34 | 34 | na |
| Innovative | 67 | 35 | 32 | 82 | 11 | 71 |
| LSD (0.05) | ns | ns | - | 15 | 17 | - |
| 10 September | 16 September | |||||
| Conventional | 55 | 55 | na | 54 | 54 | na |
| Innovative | 69 | 28 | 41 | 85 | 7 | 78 |
| LSD (0.05) | ns | 16 | - | 20 | 18 | - |
| 10 October | 16 October | |||||
| Conventional | 81 | 81 | na | 87 | 87 | na |
| Innovative | 67 | 20 | 47 | 95 | 5 | 90 |
| LSD (0.05) | 15 | 13 | - | ns | 12 | - |
| 07 November | 05 November | |||||
| Conventional | 84 | 84 | na | 94 | 94 | na |
| Innovative | 67 | 16 | 51 | 98 | 4 | 94 |
| LSD (0.05) | 12 | 15 | - | ns | 15 | - |
| Parameter | Unit | 2018 | 2019 |
|---|---|---|---|
| Innovative | |||
| Daily Mowing Time (no recharging) | h d−1 | 7.86 | 7.82 |
| Total Working Time | h y−1 ha−1 | 4810.32 | 7663.60 |
| Electric Energy Consumption | kWh y−1 ha−1 | 188.56 | 301.54 |
| Primary Energy Consumption | kWh y−1 ha−1 | 345.34 | 552.26 |
| Total CO2 Emissions | kg y−1 ha−1 | 114.65 | 183.35 |
| Conventional | |||
| Total Working Time | h y−1 ha−1 | 8.20 | 15.48 |
| Total Fuel Consumption | kg y−1 ha−1 | 59.63 | 111.73 |
| Primary Energy Consumption | kWh y−1 ha−1 | 717.40 | 1344.07 |
| Total CO2 Emissions | kg y−1 ha−1 | 190.11 | 356.18 |
| Management System | Stem Water Potential (MPa) | ||
|---|---|---|---|
| 28 June | 6 August | 7 September | |
| Conventional | −0.27 ± 0.03 | −0.28 ± 0.03 | −0.30 ± 0.04 |
| Innovative | −0.27 ± 0.03 | −0.28 ± 0.07 | −0.33 ± 0.03 |
| LSD (0.05) | ns | ns | ns |
| Greenness Index (SPAD) | |||
| Conventional | 45.6 ± 2.16 | 48.1 ± 2.47 | 46.3 ± 1.59 |
| Innovative | 45.1 ± 3.29 | 46.3 ± 1.59 | 45.2 ± 5.61 |
| LSD (0.05) | ns | ns | ns |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magni, S.; Sportelli, M.; Grossi, N.; Volterrani, M.; Minelli, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Gaetani, M.; Martelloni, L.; et al. Autonomous Mowing and Turf-Type Bermudagrass as Innovations for An Environment-Friendly Floor Management of a Vineyard in Coastal Tuscany. Agriculture 2020, 10, 189. https://doi.org/10.3390/agriculture10050189
Magni S, Sportelli M, Grossi N, Volterrani M, Minelli A, Pirchio M, Fontanelli M, Frasconi C, Gaetani M, Martelloni L, et al. Autonomous Mowing and Turf-Type Bermudagrass as Innovations for An Environment-Friendly Floor Management of a Vineyard in Coastal Tuscany. Agriculture. 2020; 10(5):189. https://doi.org/10.3390/agriculture10050189
Chicago/Turabian StyleMagni, Simone, Mino Sportelli, Nicola Grossi, Marco Volterrani, Alberto Minelli, Michel Pirchio, Marco Fontanelli, Christian Frasconi, Monica Gaetani, Luisa Martelloni, and et al. 2020. "Autonomous Mowing and Turf-Type Bermudagrass as Innovations for An Environment-Friendly Floor Management of a Vineyard in Coastal Tuscany" Agriculture 10, no. 5: 189. https://doi.org/10.3390/agriculture10050189