
Variations of Sensorimotor Representation (Structure): The Functional Interplay between Object Features and Goal-Directed Grasping Actions


Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Stimuli Design
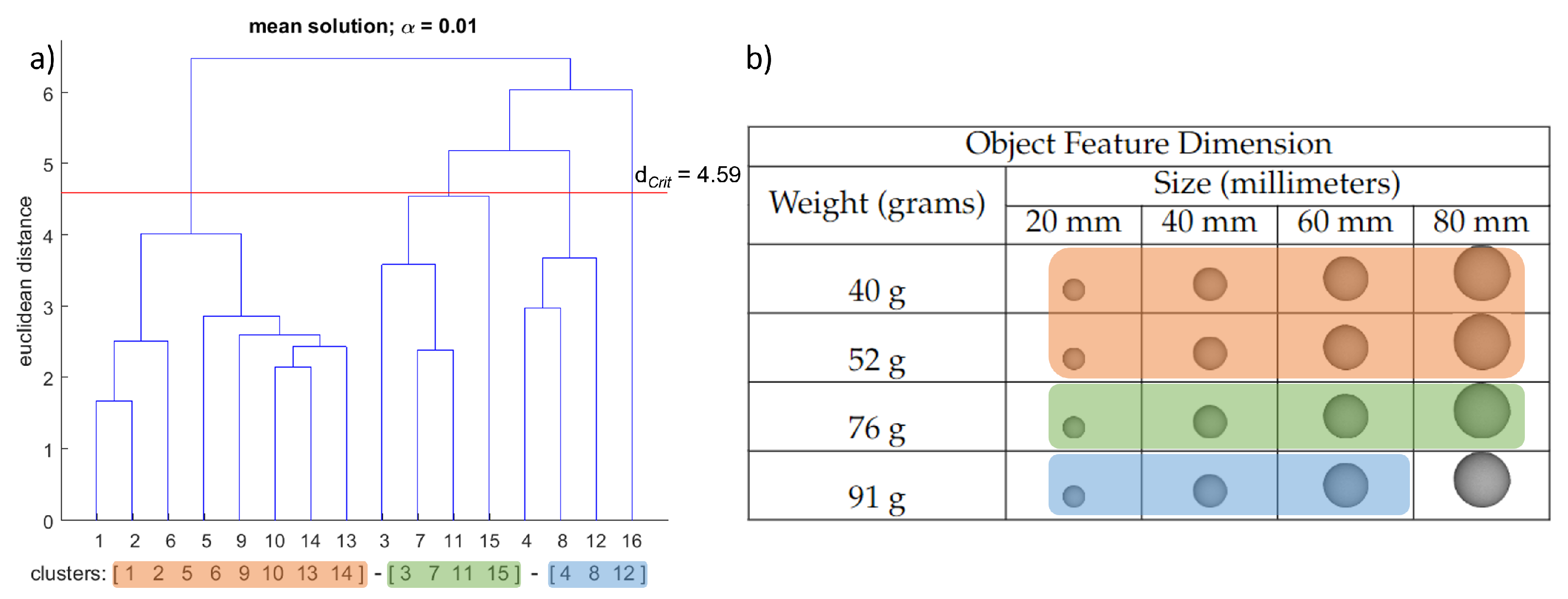
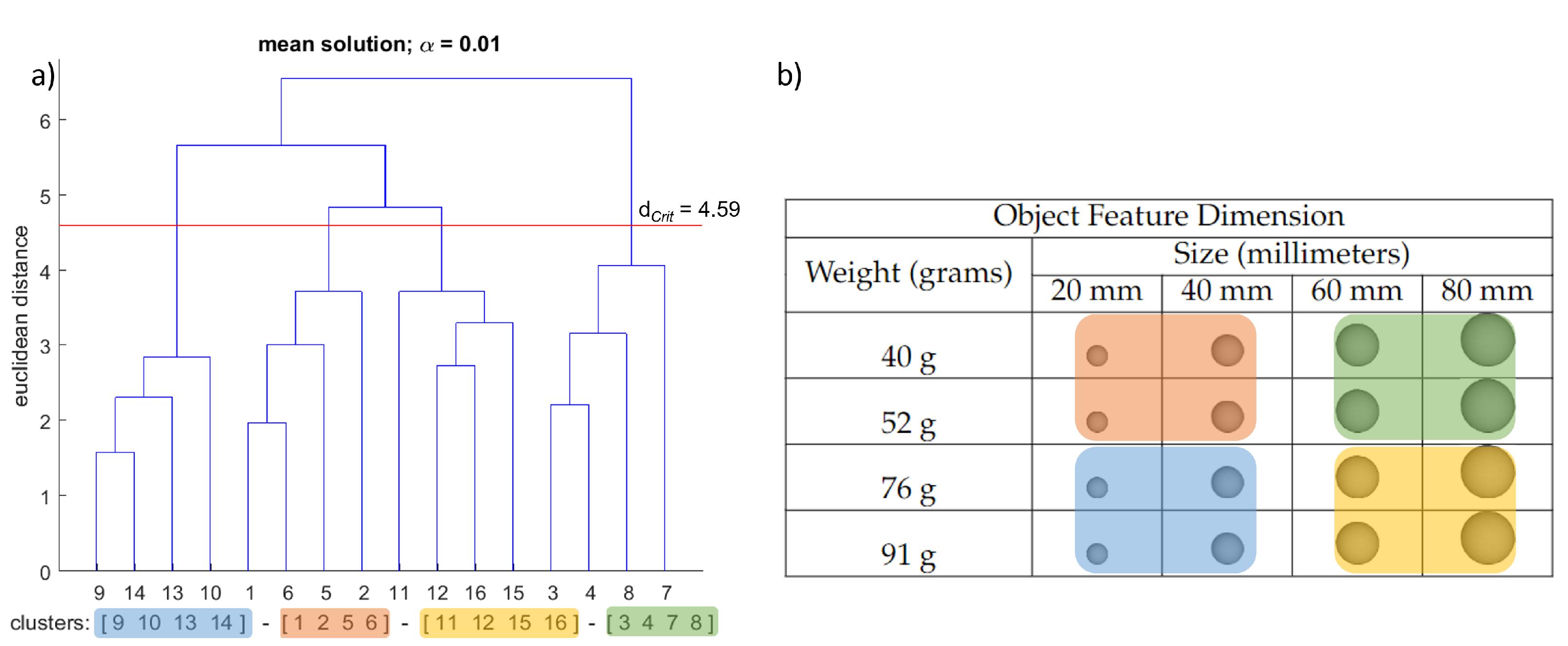
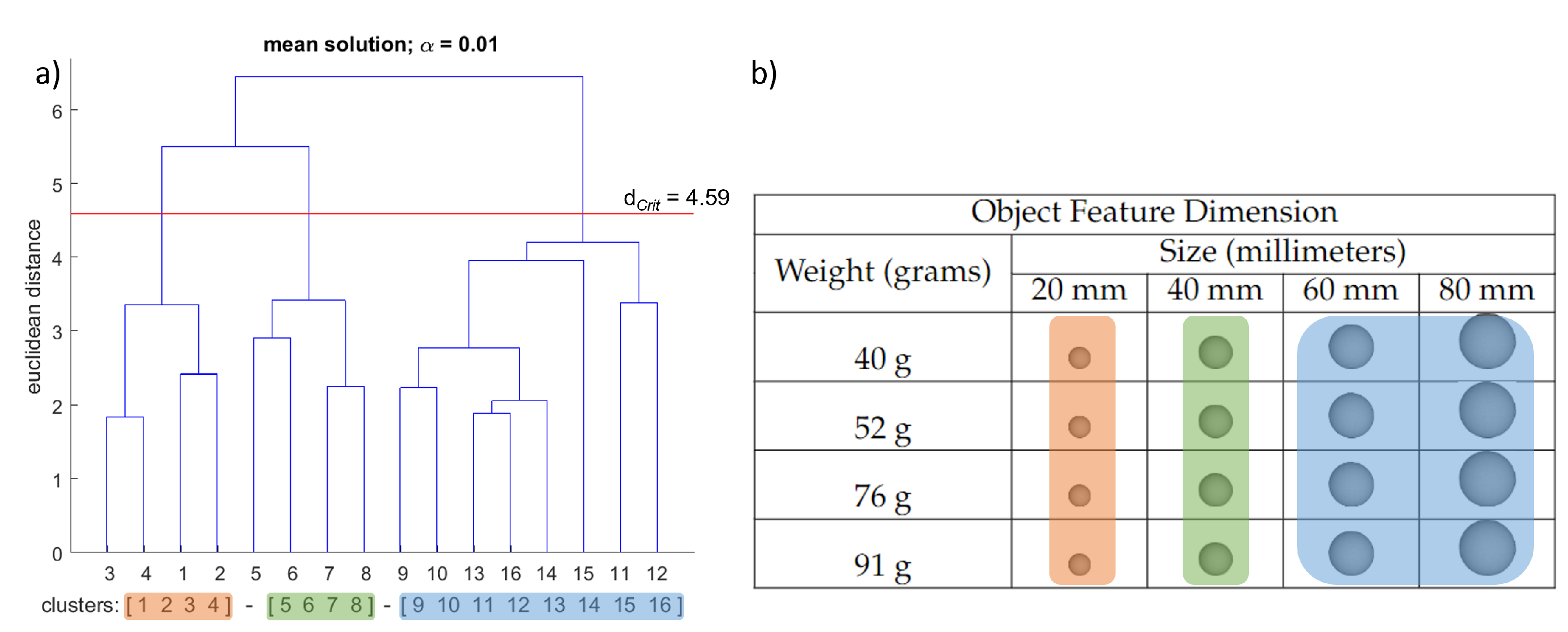
- Size (diameter): 20 mm, 40 mm, 60 mm, 80 mm.
- Weight: 40 g, 52 g, 76 g, 91 g.
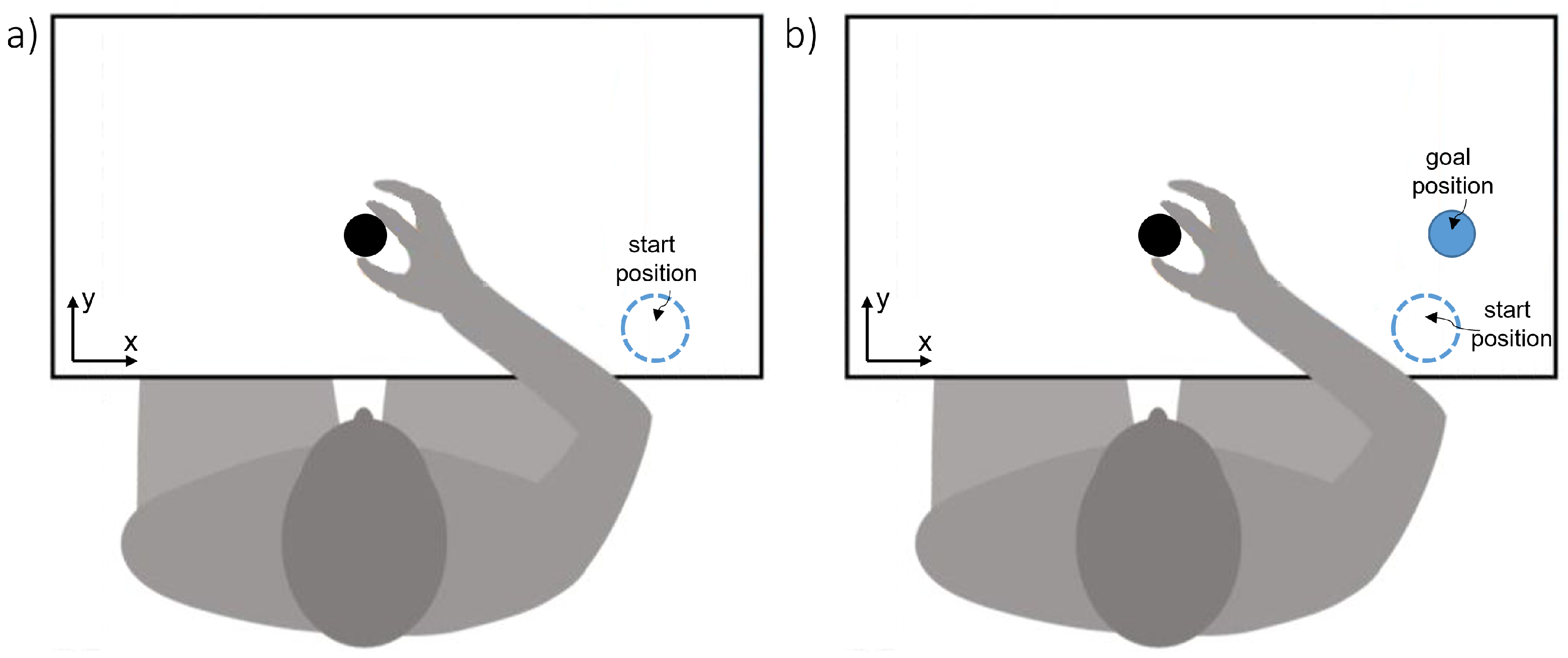
2.3. Measurement
2.4. Setup and Procedure
2.5. Data Analysis
3. Results
3.1. Mental Representation Structure
3.2. Invariance Analysis
4. Discussion
4.1. Study Limitations
4.2. Implications for Research and Practice
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miall, R.C.; Rosenthal, O.; Ørstavik, K.; Cole, J.D.; Sarlegna, F.R. Loss of haptic feedback impairs control of hand posture: A study in chronically deafferented individuals when grasping and lifting objects. Exp. Brain Res. 2019, 237, 2167–2184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gibson, J.J. The Ecological Approach to Visual Perception: Classic Edition; Psychology Press: London, UK, 2014. [Google Scholar] [CrossRef]
- Gentilucci, M.; Castiello, U.; Corradini, M.; Scarpa, M.; Umiltà, C.; Rizzolatti, G. Influence of different types of grasping on the transport component of prehension movements. Neuropsychologia 1991, 29, 361–378. [Google Scholar] [CrossRef]
- Jakobson, L.; Goodale, M. Factors affecting higher-order movement planning: A kinematic analysis of human prehension. Exp. Brain Res. 1991, 86, 199–208. [Google Scholar] [CrossRef] [PubMed]
- Mckee, S.P.; Welch, L. The precision of size constancy. Vis. Res. 1992, 32, 1447–1460. [Google Scholar] [CrossRef]
- Jeannerod, M. The Neural and Behavioural Organization of Goal-Directed Movements; Clarendon Press/Oxford University Press: Oxfordu, UK, 1988. [Google Scholar]
- Marteniuk, R.G.; Leavitt, J.L.; MacKenzie, C.L.; Athenes, S. Functional relationships between grasp and transport components in a prehension task. Hum. Mov. Sci. 1990, 9, 149–176. [Google Scholar] [CrossRef]
- Smeets, J.B.; Brenner, E. A New View on Grasping. Motor. Control. 1999, 3, 237–271. [Google Scholar] [CrossRef] [Green Version]
- Chainay, H.; Brüers, S.; Martin, H.; Osiurak, F. Transport and use of common objects: Influence of weight on action planning. Vis. Cogn. 2014, 22, 1154–1172. [Google Scholar] [CrossRef]
- Thomas, L.E. Grasp posture alters visual processing biases near the hands. Psychol. Sci. 2015, 26, 625–632. [Google Scholar] [CrossRef] [Green Version]
- Armbrüster, C.; Spijkers, W. Movement Planning in Prehension: Do Intended Actions Influence the Initial Reach and Grasp Movement? Mot. Control. 2006, 10, 311–329. [Google Scholar] [CrossRef]
- Ansuini, C.; Santello, M.; Massaccesi, S.; Castiello, U. Effects of End-Goal on Hand Shaping. J. Neurophysiol. 2006, 95, 2456–2465. [Google Scholar] [CrossRef] [PubMed]
- Sartori, L.; Straulino, E.; Castiello, U. How Objects Are Grasped: The Interplay between Affordances and End-Goals. PLoS ONE 2011, 6, e25203. [Google Scholar] [CrossRef] [PubMed]
- Quarona, D.; Raffuzzi, M.; Costantini, M.; Sinigaglia, C. Preventing action slows down performance in perceptual judgment. Exp. Brain Res. 2020, 238, 2857–2864. [Google Scholar] [CrossRef] [PubMed]
- Bernstein, N.A. The Co-ordination and Regulation of Movements: Conclusions towards the Study of Motor Co-Ordination, Biodynamics of Locomotion, 1st ed.; Pergamon Press: Oxford, UK; New York, NY, USA,, 1967. [Google Scholar]
- Hommel, B.; Müsseler, J.; Aschersleben, G.; Prinz, W. The Theory of Event Coding (TEC): A framework for perception and action planning. Behav. Brain Sci. 2001, 24, 849–878. [Google Scholar] [CrossRef]
- Mechsner, F.; Kerzel, D.; Knoblich, G.; Prinz, W. Perceptual basis of bimanual coordination. Nature 2001, 414, 69–73. [Google Scholar] [CrossRef]
- Jeannerod, M. Neural Simulation of Action: A Unifying Mechanism for Motor Cognition. NeuroImage 2001, 14, S103–S109. [Google Scholar] [CrossRef] [PubMed]
- Schack, T.; Mechsner, F. Representation of motor skills in human long-term memory. Neurosci. Lett. 2006, 391, 77–81. [Google Scholar] [CrossRef] [PubMed]
- Shin, Y.K.; Proctor, R.W.; Capaldi, E.J. A review of contemporary ideomotor theory. Psychol. Bull. 2010, 136, 943–974. [Google Scholar] [CrossRef]
- Schack, T. The cognitive architecture of complex movement. Int. J. Sport Exerc. Psychol. 2004, 2, 403–438. [Google Scholar] [CrossRef]
- Schack, T. Knowledge and performance in action. J. Knowl. Manag. 2004, 8, 38–53. [Google Scholar] [CrossRef]
- Rosenbaum, D.A.; Cohen, R.G.; Jax, S.A.; Weiss, D.J.; van der Wel, R. The problem of serial order in behavior: Lashley’s legacy. Hum. Mov. Sci. 2007, 26, 525–554. [Google Scholar] [CrossRef]
- Schack, T.; Ritter, H. The cognitive nature of action—functional links between cognitive psychology, movement science, and robotics. In Mind and Motion: The Bidirectional Link between Thought and Action; Raab, M., Johnson, J.G., Heekeren, H.R., Eds.; Elsevier: Amsterdam, The Netherlands, 2009; Volume 174, pp. 231–250. [Google Scholar] [CrossRef]
- Brodie, E.E.; Ross, H.E. Sensorimotor mechanisms in weight discrimination. Percept. Psychophys. 1984, 36, 477–481. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grandy, M.S.; Westwood, D.A. Opposite perceptual and sensorimotor responses to a size-weight illusion. J. Neurophysiol. 2006, 95, 3887–3892. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Flanagan, J.R.; Beltzner, M.A. Independence of perceptual and sensorimotor predictions in the size-weight illusion. Nat. Neurosci. 2000, 3, 737–741. [Google Scholar] [CrossRef]
- O’Shea, H.; Redmond, S.J. A review of the neurobiomechanical processes underlying secure gripping in object manipulation. Neurosci. Biobehav. Rev. 2021, 123, 286–300. [Google Scholar] [CrossRef] [PubMed]
- Gallivan, J.P.; Chapman, C.S.; Wolpert, D.M.; Flanagan, J.R. Decision-making in sensorimotor control. Nat. Rev. Neurosci. 2018, 19, 519–534. [Google Scholar] [CrossRef]
- Camponogara, I.; Volcic, R. Grasping movements toward seen and handheld objects. Sci. Rep. 2019, 9, 3665. [Google Scholar] [CrossRef] [Green Version]
- Wenzelburger, R.; Kopper, F.; Frenzel, A.; Stolze, H.; Klebe, S.; Brossmann, A.; Kuhtz-Buschbeck, J.; Gölge, M.; Illert, M.; Deuschl, G. Hand coordination following capsular stroke. Brain 2005, 128, 64–74. [Google Scholar] [CrossRef] [Green Version]
- Duque, J.; Thonnard, J.; Vandermeeren, Y.; Sébire, G.; Cosnard, G.; Olivier, E. Correlation between impaired dexterity and corticospinal tract dysgenesis in congenital hemiplegia. Brain 2003, 126, 732–747. [Google Scholar] [CrossRef] [Green Version]
- Andersen, C.K.; Wittrup-Jensen, K.U.; Lolk, A.; Andersen, K.; Kragh-Sørensen, P. Ability to perform activities of daily living is the main factor affecting quality of life in patients with dementia. Health Qual. Life Outcomes 2004, 2, 52. [Google Scholar] [CrossRef] [Green Version]
- Schack, T. A method for Measuring Mental Representation. In Handbook of Measurement in Sport; Human Kinetics: Champaign, IL, USA, 2012. [Google Scholar]
- Stöckel, T.; Hughes, C.M.; Schack, T. Representation of grasp postures and anticipatory motor planning in children. Psychol. Res. 2012, 76, 768–776. [Google Scholar] [CrossRef]
- Braun, S.M.; Beurskens, A.J.; Schack, T.; Marcellis, R.G.; Oti, K.C.; Schols, J.M.; Wade, D.T. Is it possible to use the Structural Dimension Analysis of Motor Memory (SDA-M) to investigate representations of motor actions in stroke patients? Clin. Rehabil. 2007, 21, 822–832. [Google Scholar] [CrossRef] [PubMed]
- Schack, T.; Ritter, H. Representation and learning in motor action – bridges between experimental research and cognitive robotics. New Ideas Psychol. 2013, 31, 258–269. [Google Scholar] [CrossRef]
- Weigelt, M.; Ahlmeyer, T.; Lex, H.; Schack, T. The cognitive representation of a throwing technique in judo experts—Technological ways for individual skill diagnostics in high-performance sports. Psychol. Sport Exerc. 2011, 12, 231–235. [Google Scholar] [CrossRef]
- Kim, T.; Frank, C.; Schack, T. A systematic investigation of the effect of action observation training and motor imagery training on the development of mental representation structure and skill performance. Front. Hum. Neurosci. 2017, 11, 499. [Google Scholar] [CrossRef] [Green Version]
- Girardi, G.; Lindemann, O.; Bekkering, H. Context effects on the processing of action-relevant object features. J. Exp. Psychol. Hum. Percept. Perform. 2010, 36, 330. [Google Scholar] [CrossRef] [Green Version]
- Dragovic, M. Towards an improved measure of the Edinburgh Handedness Inventory: A one-factor congeneric measurement model using confirmatory factor analysis. Laterality Asymmetries Body Brain Cogn. 2004, 9, 411–419. [Google Scholar] [CrossRef] [PubMed]
- Ellis, R.R.; Lederman, S.J. The material-weight illusion revisited. Percept. Psychophys. 1999, 61, 1564–1576. [Google Scholar] [CrossRef] [Green Version]
- McGraw, P.V.; Whitaker, D. Perceptual distortions in the neural representation of visual space. Exp. Brain Res. 1999, 125, 122–128. [Google Scholar] [CrossRef]
- Holmes, S.A.; Heath, M. Goal-directed grasping: The dimensional properties of an object influence the nature of the visual information mediating aperture shaping. Brain Cogn. 2013, 82, 18–24. [Google Scholar] [CrossRef]
- Kawai, S. Heaviness perception. Exp. Brain Res. 2002, 147, 23–28. [Google Scholar] [CrossRef]
- Dix, A.; Schwendicke, A.; Pannasch, S.; Altinsoy, E.; Helmert, J.R. Augmented perception and interaction. In Tactile Internet; Fitzek, F.H., Li, S.C., Speidel, S., Strufe, T., Simsek, M., Reisslein, M., Eds.; Academic Press: Cambridge, MA, USA, 2021; Chapter 7; pp. 151–167. [Google Scholar] [CrossRef]
- Lander, H.J.; Lange, K. Untersuchung zur Struktur- und Dimensionsanalyse begrifflich-repräsentierten Wissens. Zeitschrift für Psychologie 1996, 204, 55–74. [Google Scholar]
- Land, W.M.; Volchenkov, D.; Bläsing, B.; Schack, T. From action representation to action execution: Exploring the links between cognitive and biomechanical levels of motor control. Front. Comput. Neurosci. 2013, 7, 127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lander, H.J. Ein methodischer Ansatz zur Ermittlung der Struktur und der Dimensionierung einer intern-repräsen- tierten Begriffsmenge [A methodological approach for determining the structure and dimensions of an internally represented set of concepts]. Zeitschrift für Psychologie Mit Zeitschrift für Angewandte Psychologie 1991, 199, 167–176. [Google Scholar]
- Schack, T. Zur kognitiven Architektur von Bewegungshandlungen—modelltheoretischer Zugang und experimentelle Untersuchungen. Ph.D. Thesis, Deutsche Sporthochschule Köln, Köln, Germany, 2002. [Google Scholar]
- McCloskey, D.; Ebeling, P.; Goodwin, G. Estimation of weights and tensions and apparent involvement of a “sense of effort”. Exp. Neurol. 1974, 42, 220–232. [Google Scholar] [CrossRef]
- Goodwin, G.M.; McCloskey, D.I.; Matthews, P.B. The contribution of muscle afferents to kinaesthesia shown by vibration induced illusions of movement and by the effects of paralysing joint afferents. Brain 1972, 95, 705–748. [Google Scholar] [CrossRef] [Green Version]
- Buckingham, G.; Goodale, M.A. The influence of competing perceptual and motor priors in the context of the size–weight illusion. Exp. Brain Res. 2010, 205, 283–288. [Google Scholar] [CrossRef]
- Buckingham, G.; Goodale, M.A. Size Matters: A Single Representation Underlies Our Perceptions of Heaviness in the Size-Weight Illusion. PLoS ONE 2013, 8, e54709. [Google Scholar] [CrossRef] [Green Version]
- Wolf, C.; Drewing, K. The size-weight illusion comes along with improved weight discrimination. PLoS ONE 2020, 15, e0236440. [Google Scholar] [CrossRef]
- Dijker, A.J.M. The role of expectancies in the size-weight illusion: A review of theoretical and empirical arguments and a new explanation. Psychon. Bulletin Rev. 2014, 21, 1404–1414. [Google Scholar] [CrossRef]
- Kawai, S.; Henigman, F.; MacKenzie, C.L.; Kuang, A.B.; Faust, P.H. A reexamination of the size–weight illusion induced by visual size cues. Exp. Brain Res. 2007, 179, 443–456. [Google Scholar] [CrossRef]
- Goodale, M.A. Visuomotor control: Where does vision end and action begin? Curr. Biol. 1998, 8, R489–R491. [Google Scholar] [CrossRef] [Green Version]
- Maschke, M.; Tuite, P.J.; Krawczewski, K.; Pickett, K.; Konczak, J. Perception of heaviness in Parkinson’s disease. Mov. Disord. 2006, 21, 1013–1018. [Google Scholar] [CrossRef] [PubMed]
- Jeannerod, M.; Arbib, M.; Rizzolatti, G.; Sakata, H. Grasping objects: The cortical mechanisms of visuomotor transformation. Trends Neurosci. 1995, 18, 314–320. [Google Scholar] [CrossRef]
- Goodale, M.A.; Keith Humphrey, G. The objects of action and perception. Cognition 1998, 67, 181–207. [Google Scholar] [CrossRef]
- Srinivasan, D.; Martin, B. Object and Target Size Interactions in Placement Tasks. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2008, 52, 940–944. [Google Scholar] [CrossRef]
- Eastough, D.; Edwards, M.G. Movement kinematics in prehension are affected by grasping objects of different mass. Exp. Brain Res. 2007, 176, 193–198. [Google Scholar] [CrossRef] [Green Version]
- Buckingham, G.; Cant, J.S.; Goodale, M.A. Living in A Material World: How Visual Cues to Material Properties Affect the Way That We Lift Objects and Perceive Their Weight. J. Neurophysiol. 2009, 102, 3111–3118. [Google Scholar] [CrossRef]
- Goodale, M.A.; Milner, A.D.; Jakobson, L.S.; Carey, D.P. A neurological dissociation between perceiving objects and grasping them. Nature 1991, 349, 154–156. [Google Scholar] [CrossRef]
- Tucker, M.; Ellis, R. On the relations between seen objects and components of potential actions. J. Exp. Psychol. Hum. Percept. Perform. 1998, 24, 830–846. [Google Scholar] [CrossRef]
- Cuijpers, R.H.; Smeets, J.B.J.; Brenner, E. On the Relation Between Object Shape and Grasping Kinematics. J. Neurophysiol. 2004, 91, 2598–2606. [Google Scholar] [CrossRef]
- Castiello, U. The neuroscience of grasping. Nat. Rev. Neurosci. 2005, 6, 726–736. [Google Scholar] [CrossRef] [PubMed]
- Ansuini, C.; Giosa, L.; Turella, L.; Altoè, G.; Castiello, U. An object for an action, the same object for other actions: Effects on hand shaping. Exp. Brain Res. 2008, 185, 111–119. [Google Scholar] [CrossRef] [PubMed]
- Shimojo, S.; Shams, L. Sensory modalities are not separate modalities: Plasticity and interactions. Curr. Opin. Neurobiol. 2001, 11, 505–509. [Google Scholar] [CrossRef]
- Maravita, A.; Spence, C.; Driver, J. Multisensory integration and the body schema: Close to hand and within reach. Curr. Biol. 2003, 13. [Google Scholar] [CrossRef] [Green Version]
- Lloyd, D.M.; Shore, D.I.; Spence, C.; Calvert, G.A. Multisensory representation of limb position in human premotor cortex. Nat. Neurosci. 2003, 6, 17–18. [Google Scholar] [CrossRef] [PubMed]
- Kauffman, T.; Théoret, H.; Pascual-Leone, A. Braille character discrimination in blindfolded human subjects. NeuroReport 2002, 13, 571–574. [Google Scholar] [CrossRef] [PubMed]
- Radziun, D.; Ehrsson, H.H. Short-term visual deprivation boosts the flexibility of body representation. Sci. Rep. 2018, 8, 6284. [Google Scholar] [CrossRef]
- Memelink, J.; Hommel, B. Intentional weighting: A basic principle in cognitive control. Psychol. Res. 2013, 77, 249–259. [Google Scholar] [CrossRef] [Green Version]
- Hommel, B. Goal-directed actions. In The Oxford handbook of causal reasoning; Waldmann, M.R., Ed.; Oxford University Press: Oxford, UK, 2017; pp. 265–277. [Google Scholar] [CrossRef]
- Maycock, J.; Bläsing, B.; Bockemühl, T.; Ritter, H.; Schack, T. Motor synergies and object representation in virtual and real grasping. In Proceedings of the 1st International Conference on Applied Bionics and Biomechanics (ICABB), Venice, Italy, 14–16 October 2010. [Google Scholar]
- Bläsing, B.E.; Güldenpenning, I.; Koester, D.; Schack, T. Expertise affects representation structure and categorical activation of grasp postures in climbing. Front. Psychol. 2014, 5, 1008. [Google Scholar] [CrossRef] [Green Version]
- Kawato, M. Internal models for motor control and trajectory planning. Curr. Opin. Neurobiol. 1999, 9, 718–727. [Google Scholar] [CrossRef]
- Wolpert, D.M.; Flanagan, J. Motor prediction. Curr. Biol. 2001, 11, R729–R732. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.C.H.; Wolpert, D.M.; Lengyel, M. Theoretical perspectives on active sensing. Curr. Opin. Behav. Sci. 2016, 11, 100–108. [Google Scholar] [CrossRef]
- Koch, I.; Keller, P.; Prinz, W. The Ideomotor approach to action control: Implications for skilled performance. Int. J. Sport Exerc. Psychol. 2004, 2, 362–375. [Google Scholar] [CrossRef]
- Stock, A.; Stock, C. A short history of ideo-motor action. Psychol. Res. 2004, 68, 176–188. [Google Scholar] [CrossRef] [PubMed]
- Hommel, B. Theory of Event Coding (TEC) V2.0: Representing and controlling perception and action. Atten. Percept. Psychophys. 2019, 81, 2139–2154. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schack, T.; Hackfort, D. Action-Theory Approach to Applied Sport Psychology. In Handbook of Sport Psychology, 3rd ed.; Tenenbaum, G., Eklund, R.C., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007; Chapter 15; pp. 332–351. [Google Scholar] [CrossRef]
- Schack, T.; Frank, C. Mental Representation and the Cognitive Architecture of Skilled Action. Rev. Philos. Psychol. 2021, 12, 527–546. [Google Scholar] [CrossRef]
- Kim, T.; Park, H.; Schack, T. A functional link between mental representation in long-term memory and cognitive performance in working memory. Adv. Cogn. Psychol. 2019, 15, 11–20. [Google Scholar] [CrossRef]
- Flanagan, J.R.; Bittner, J.P.; Johansson, R.S. Experience can change distinct size-weight priors engaged in lifting objects and judging their weights. Curr. Biol. 2008, 18, 1742–1747. [Google Scholar] [CrossRef] [Green Version]
- Bub, D.N.; Masson, M.E.J.; van Noordenne, M. Motor representations evoked by objects under varying action intentions. J. Exp. Psychol. Hum. Percept. Perform. 2021, 47, 53–80. [Google Scholar] [CrossRef]
- Ferguson, T.D.; Bub, D.N.; Masson, M.E.J.; Krigolson, O.E. The role of cognitive control and top-down processes in object affordances. Atten. Percept. Psychophys. 2021, 83, 2017–2032. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef] [Green Version]
- Melnik, A.; Lach, L.; Plappert, M.; Korthals, T.; Haschke, R.; Ritter, H. Using Tactile Sensing to Improve the Sample Efficiency and Performance of Deep Deterministic Policy Gradients for Simulated In-Hand Manipulation Tasks. Front. Robot. AI 2021, 8. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object Feature Dimension | ||||
|---|---|---|---|---|
| Weight (Grams) | Size (Millimeters) | |||
| 20 mm | 40 mm | 60 mm | 80 mm | |
| 40 g |  |  |  |  |
| 52 g |  |  |  |  |
| 76 g |  |  |  |  |
| 91 g |  |  |  |  |
| Number | BAC | Number | BAC |
|---|---|---|---|
| 1 | S1W1 | 9 | S3W1 |
| 2 | S1W2 | 10 | S3W2 |
| 3 | S1W3 | 11 | S3W3 |
| 4 | S1W4 | 12 | S3W4 |
| 5 | S2W1 | 13 | S4W1 |
| 6 | S2W2 | 14 | S4W2 |
| 7 | S2W3 | 15 | S4W3 |
| 8 | S2W4 | 16 | S4W4 |
| Weighting | Lifting | |
|---|---|---|
| Lifting | 0.47 | - |
| Transporting | 0.46 | 0.58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cienfuegos, M.; Kim, T.; Schack, T. Variations of Sensorimotor Representation (Structure): The Functional Interplay between Object Features and Goal-Directed Grasping Actions. Brain Sci. 2022, 12, 873. https://doi.org/10.3390/brainsci12070873
Cienfuegos M, Kim T, Schack T. Variations of Sensorimotor Representation (Structure): The Functional Interplay between Object Features and Goal-Directed Grasping Actions. Brain Sciences. 2022; 12(7):873. https://doi.org/10.3390/brainsci12070873
Chicago/Turabian StyleCienfuegos, Miguel, Taeho Kim, and Thomas Schack. 2022. "Variations of Sensorimotor Representation (Structure): The Functional Interplay between Object Features and Goal-Directed Grasping Actions" Brain Sciences 12, no. 7: 873. https://doi.org/10.3390/brainsci12070873