Seismic Control of SDOF Systems with Nonlinear Eddy Current Dampers


Abstract
:Featured Application
Abstract
1. Introduction
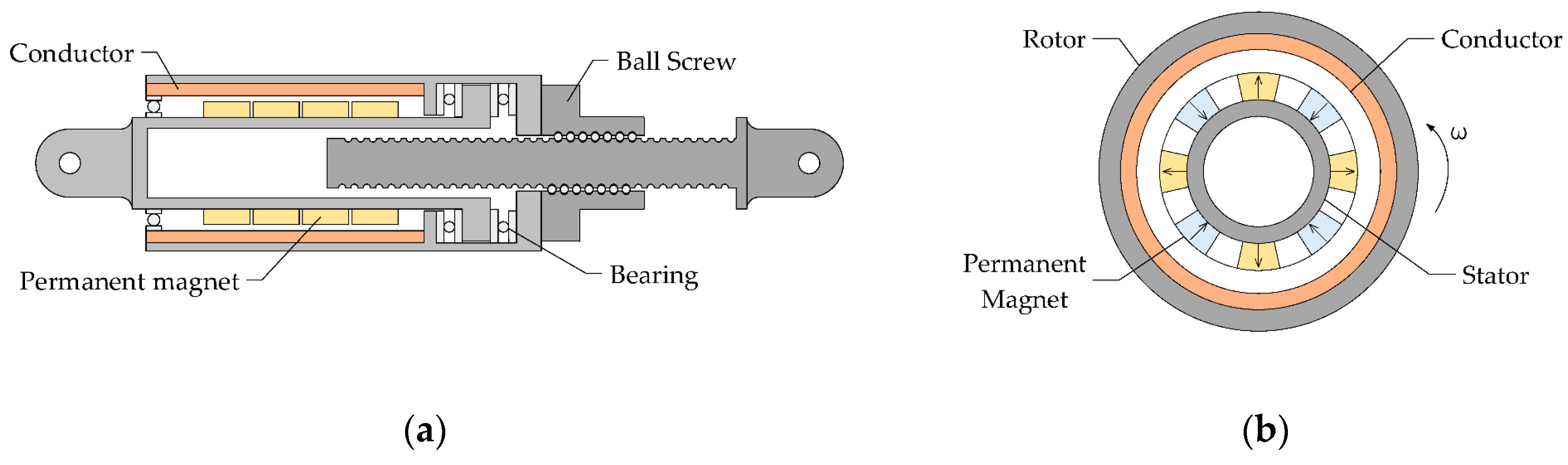
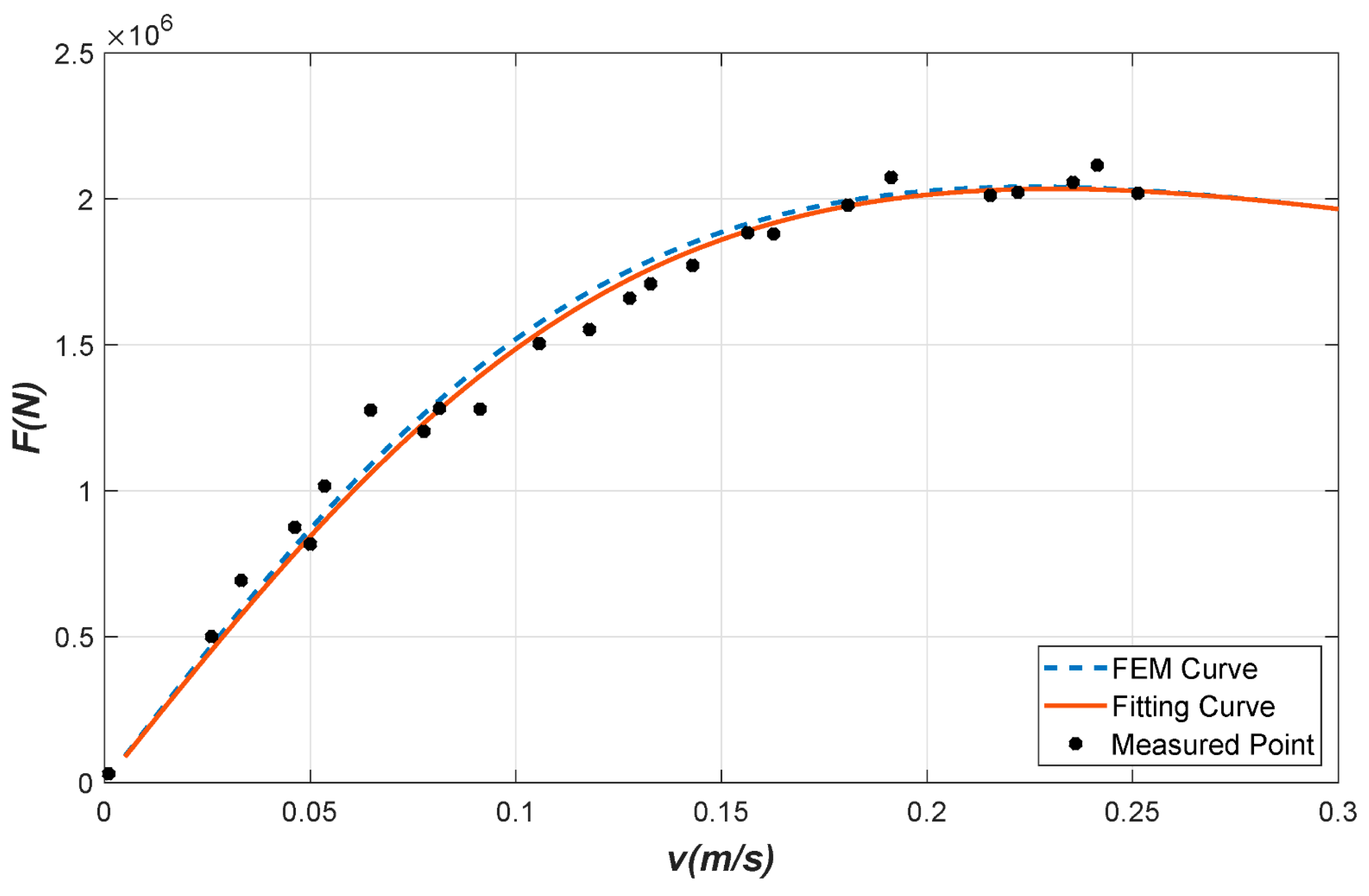
2. Nonlinear Constitutive Behavior of an Eddy Current Damper
3. Energy Dissipation Analysis
3.1. Energy Dissipation Capacity Under Harmonic Motion
3.2. Optimal Critical Velocity Under Harmonic Motion
4. SDOF Systems with Nonlinear Eddy Current Dampers
4.1. Equations of Motion and System Paramerts
4.2. Response to Harmonic Excitations
4.2.1. Displacement Response
4.2.2. Acceleration Response
4.3. Response to Seismic Excitations
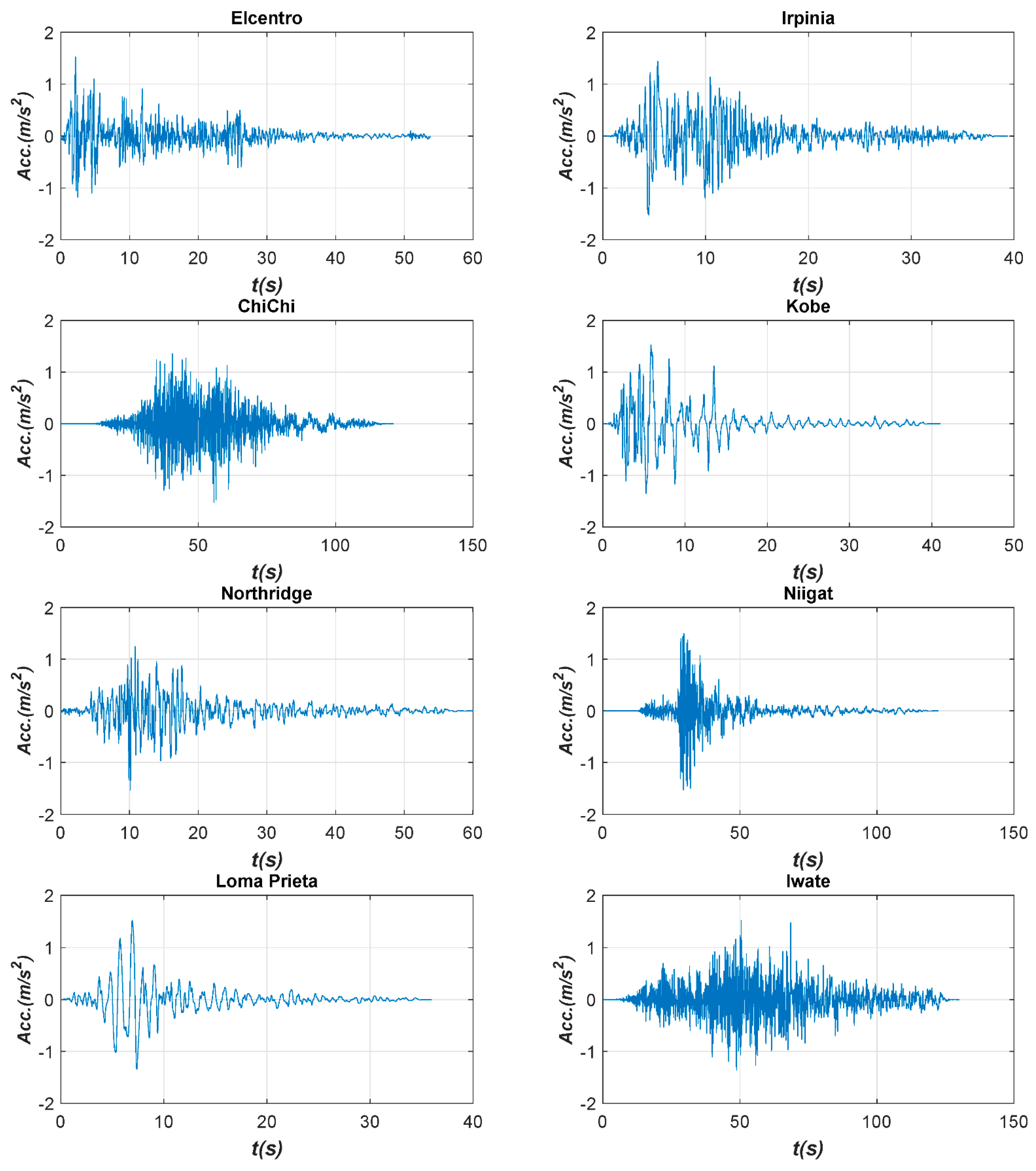
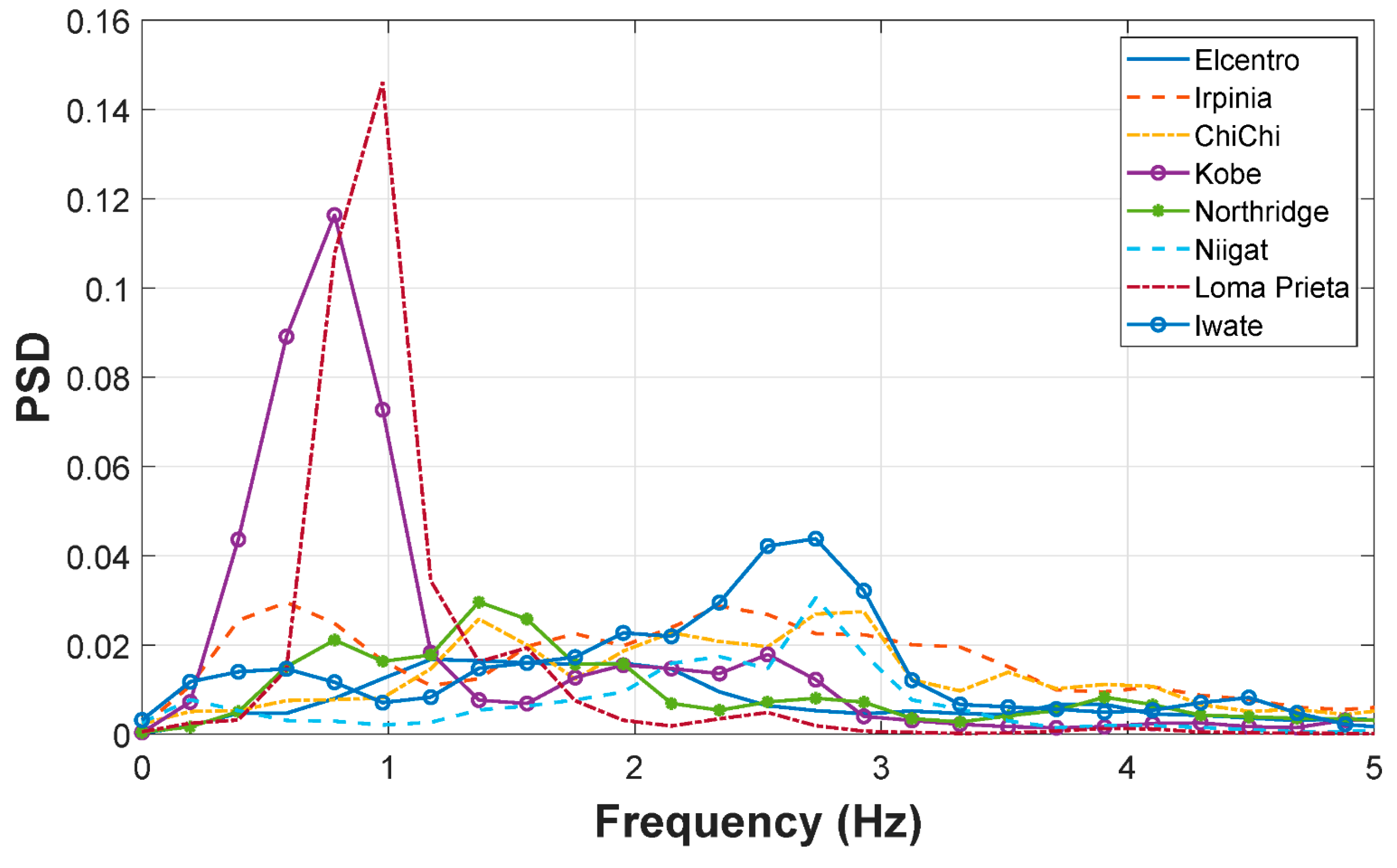
4.3.1. Characteristics of Selected Ground Motions
4.3.2. Displacement and Acceleration Responses to Real Earthquakes
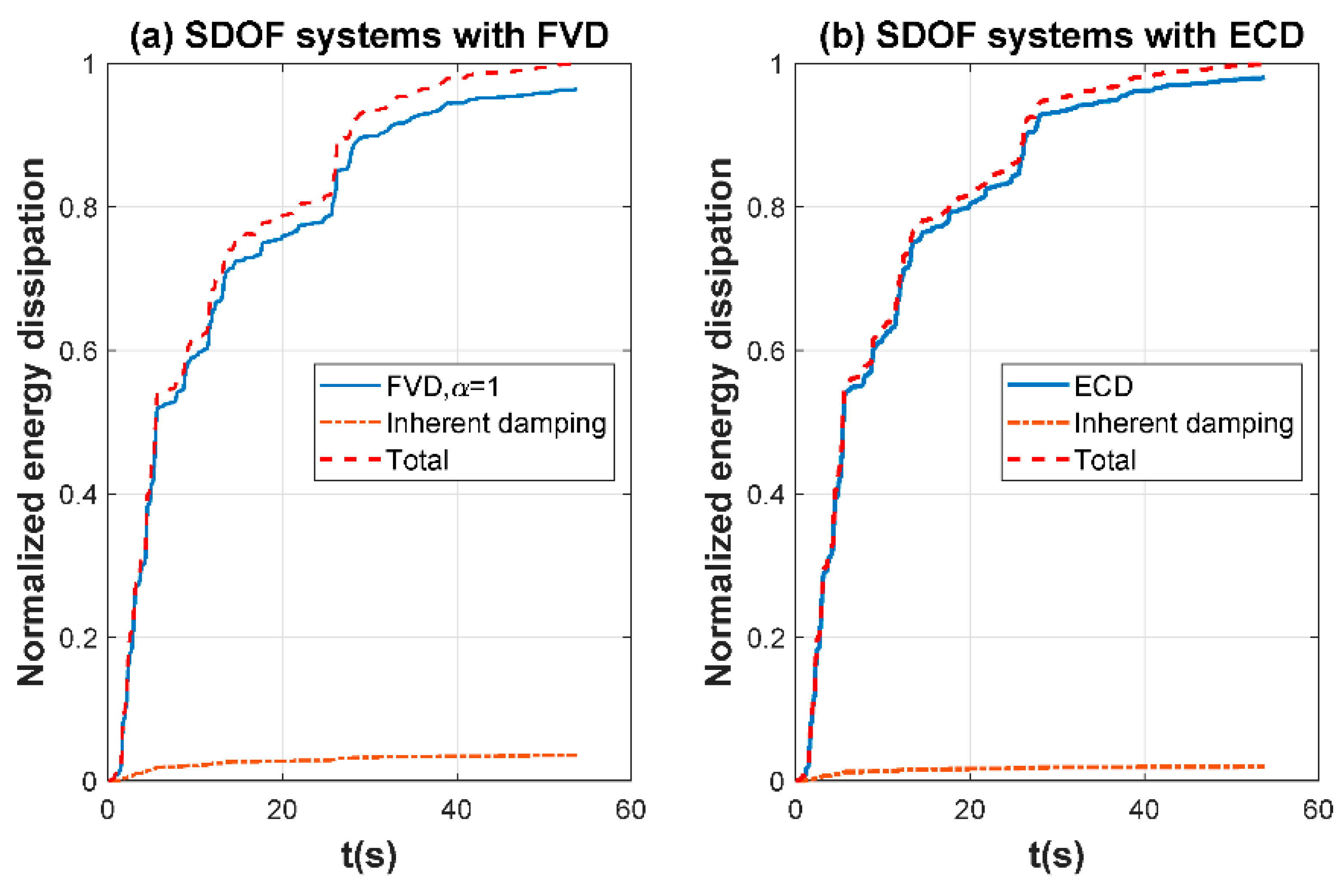
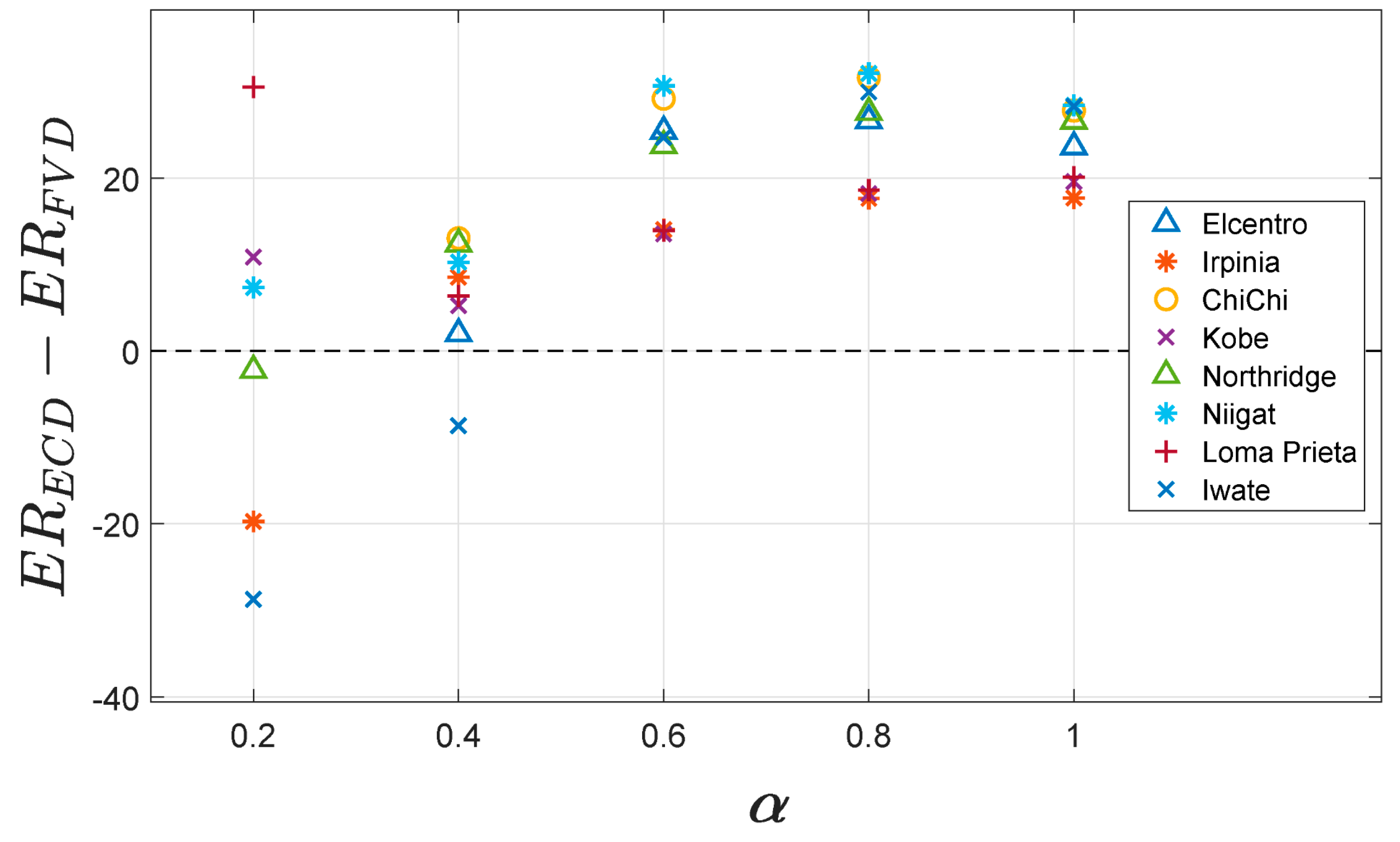
4.3.3. Energy Dissipation Analysis Under Seismic Excitations
5. Conclusions
- (1)
- The force-velocity constitutive behavior of the ECD can be well depicted by the Wouterse’s model. The eddy current damping force is linearly proportional to the velocity for low speed region, gradually increasing with decreasing slope when the velocity become higher, reaching a maximum at the critical speed, and then decreasing for much higher speeds. These unique characteristics can protect the damper and structure from damage when an over-load is exerted on the damper.
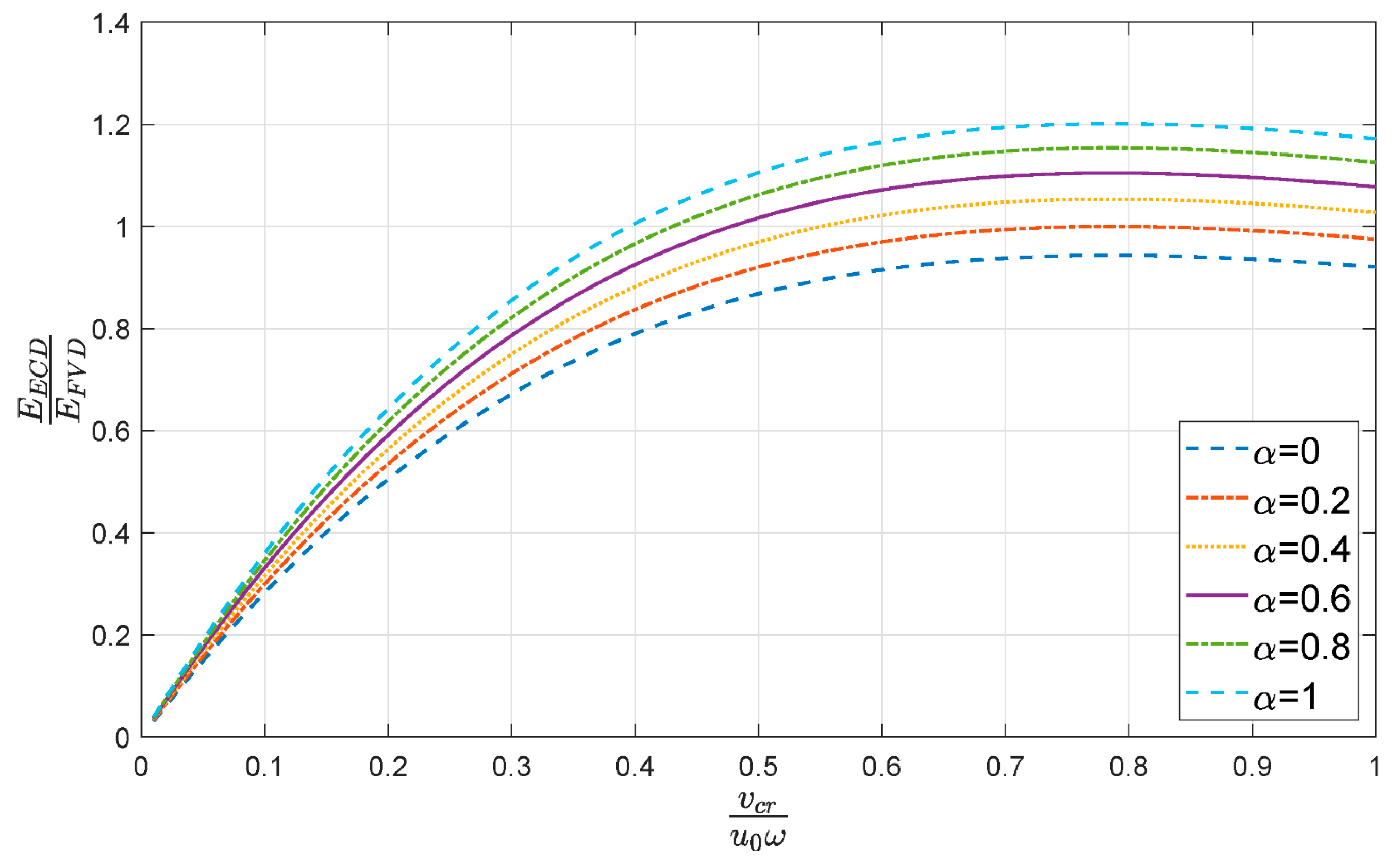
- (2)
- When the ratio of the critical velocity of the ECD to the maximum velocity is 0.786, the energy dissipation capacity of ECD reaches its maximum under harmonic motions. It always can find a better design of ECD when the velocity exponent α of FVD is larger than 0.2 such that the energy dissipation capacity of ECD is larger than that of FVD under the same harmonic motion.
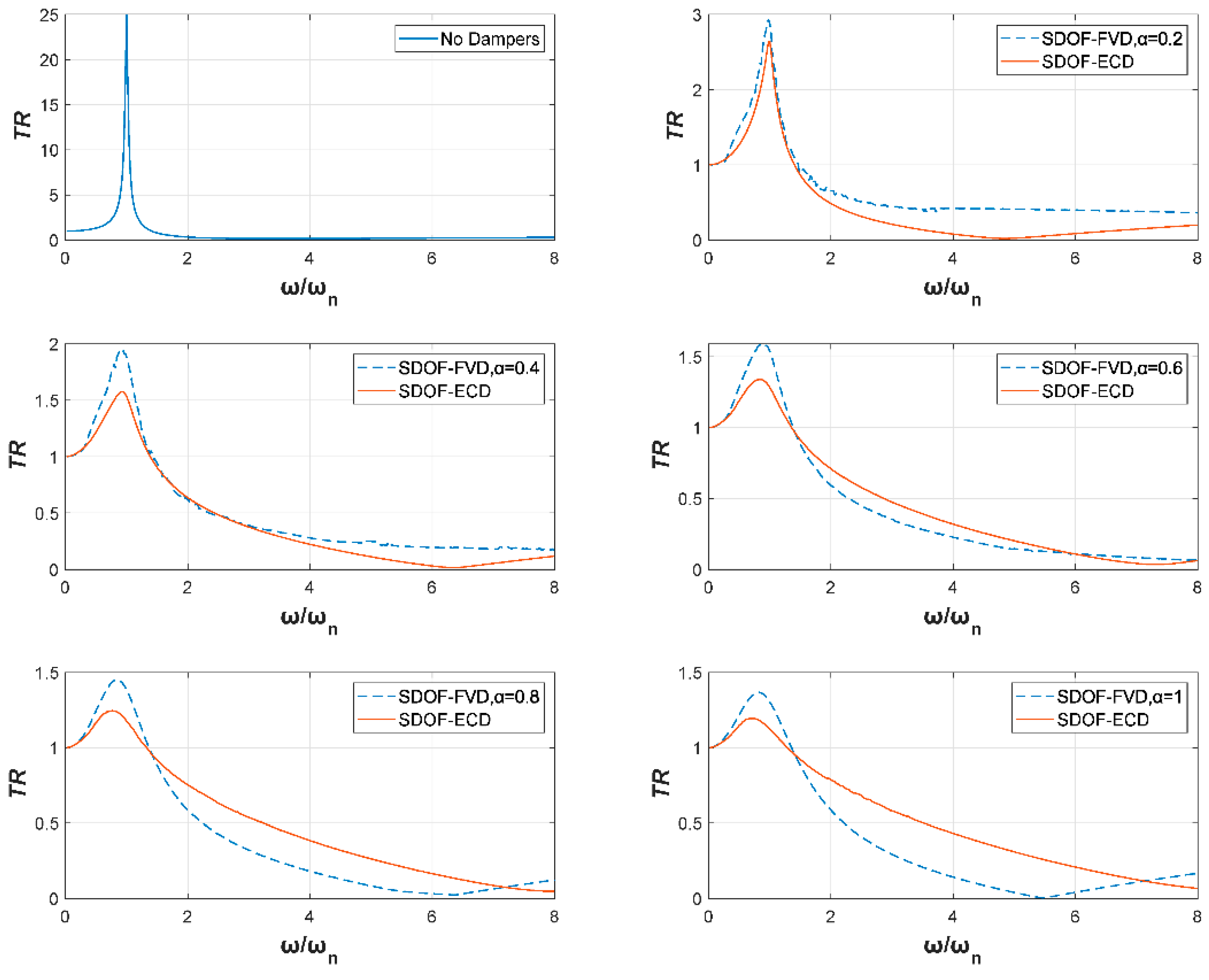
- (3)
- In the resonance frequency band, both the displacement and acceleration responses of SDOF-ECDs are smaller than those of SDOF-FVDs under the same harmonic excitation. As the velocity exponent α of the FVD increases, the control performance of the corresponding ECD gets better and better compared with that of FVD.
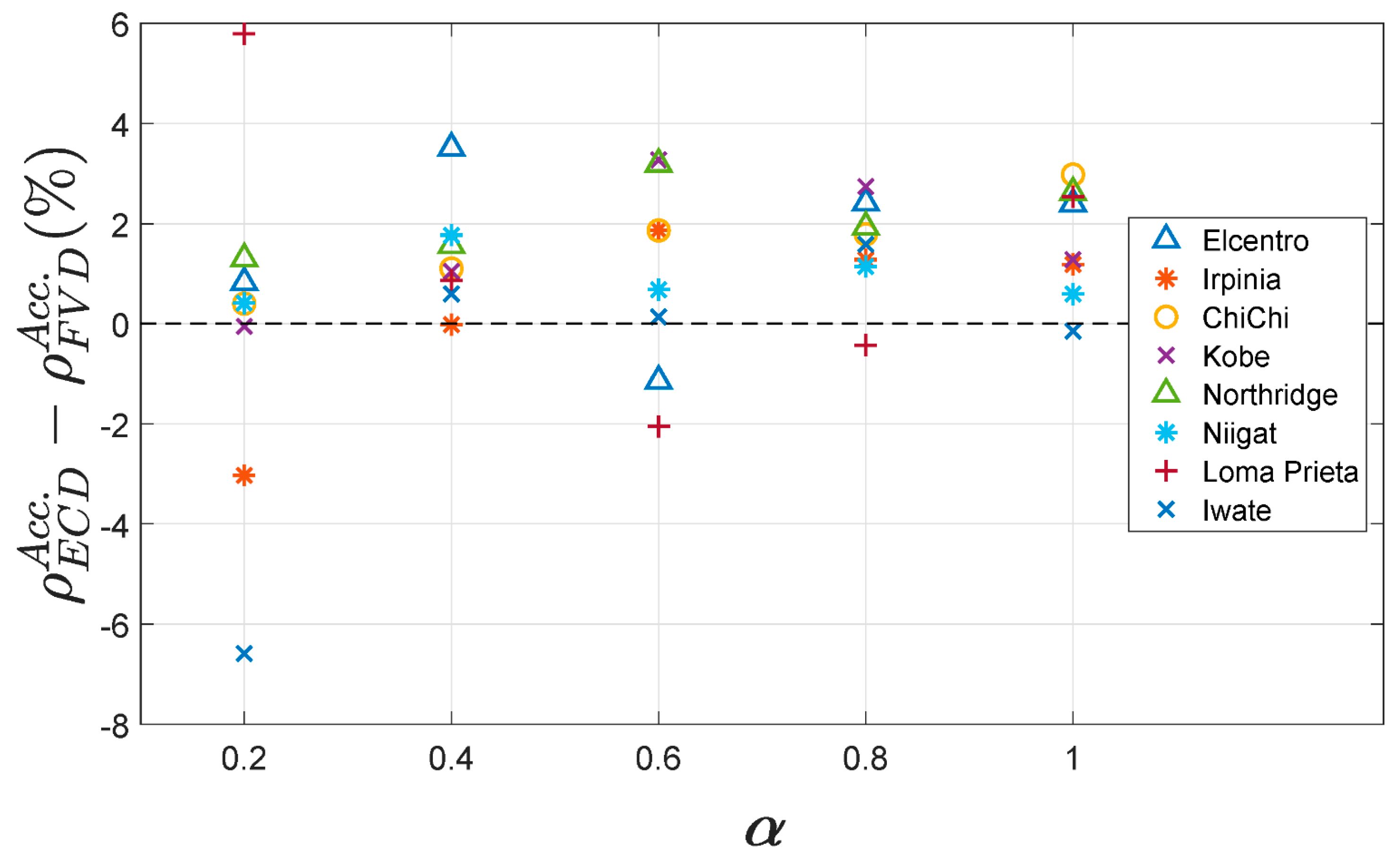
- (4)
- The displacement and acceleration reduction ratios of ECDs are larger than those of FVDs in most of the cases under real earthquake excitations, and the displacement reduction ratios are generally greater than the acceleration reduction ratios for both ECDs and FVDs. The energy dissipation capacity of ECDs outperforms that of FVDs in most of the cases under real earthquake excitations.
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Lu, X.; Chen, J. Mitigation of wind-induced response of Shanghai Center Tower by tuned mass damper. Struct. Des. Tall Spec. Build. 2011, 20, 435–452. [Google Scholar] [CrossRef]
- Lu, X.; Zhang, Q.; Weng, D.; Zhou, Z.; Wang, S.; Mahin, S.A.; Ding, S.; Qian, F. Improving performance of a super tall building using a new eddy-current tuned mass damper. Struct. Control Health Monit. 2017, 24, e1882. [Google Scholar] [CrossRef]
- Ji, X.; Liu, D.; Hutt, C.M. Seismic performance evaluation of a high-rise building with novel hybrid coupled walls. Eng. Struct. 2018, 169, 216–225. [Google Scholar] [CrossRef]
- Qian, H.; Li, H.; Song, G. Experimental investigations of building structure with a superelastic shape memory alloy friction damper subject to seismic loads. Smart Mater. Struct. 2016, 25, 125056. [Google Scholar] [CrossRef]
- Li, L.; Song, G.; Ou, J. Hybrid active mass damper (AMD) vibration suppression of nonlinear high-rise structure using fuzzy logic control algorithm under earthquake excitations. Struct. Control Health Monit. 2011, 18, 698–709. [Google Scholar] [CrossRef]
- Guo, T.; Liu, J.; Zhang, Y.; Pan, S. Displacement Monitoring and Analysis of Expansion Joints of Long-Span Steel Bridges with Viscous Dampers. J. Bridge Eng. 2015, 20, 04014099. [Google Scholar] [CrossRef]
- Yang, M.-G.; Chen, Z.-Q.; Hua, X.-G. An experimental study on using MR damper to mitigate longitudinal seismic response of a suspension bridge. Soil Dyn. Earthq. Eng. 2011, 31, 1171–1181. [Google Scholar] [CrossRef]
- Li, C.; Li, H.-N.; Hao, H.; Bi, K.; Chen, B. Seismic fragility analyses of sea-crossing cable-stayed bridges subjected to multi-support ground motions on offshore sites. Eng. Struct. 2018, 165, 441–456. [Google Scholar] [CrossRef]
- Wen, Q.; Hua, X.G.; Chen, Z.Q.; Yang, Y.; Niu, H.W. Control of Human-Induced Vibrations of a Curved Cable-Stayed Bridge: Design, Implementation, and Field Validation. J. Bridge Eng. 2016, 21, 04016028. [Google Scholar] [CrossRef]
- Varela, W.D.; Battista, R.C. Control of vibrations induced by people walking on large span composite floor decks. Eng. Struct. 2011, 33, 2485–2494. [Google Scholar] [CrossRef]
- Li, H.; Liu, M.; Li, J.; Guan, X.; Ou, J. Vibration Control of Stay Cables of the Shandong Binzhou Yellow River Highway Bridge Using Magnetorheological Fluid Dampers. J. Bridge Eng. 2007, 12, 401–409. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Wang, X.Y.; Ko, J.M.; Ni, Y.Q.; Spencer, B.F.; Yang, G.; Hu, J.H. MR damping system for mitigating wind-rain induced vibration on Dongting Lake Cable-Stayed Bridge. Wind Struct. 2004, 7, 293–304. [Google Scholar] [CrossRef]
- Shi, X.; Zhu, S.; Li, J.-Y.; Spencer, B.F., Jr. Dynamic behavior of stay cables with passive negative stiffness dampers. Smart Mater. Struct. 2016, 25, 075044. [Google Scholar] [CrossRef]
- Zhang, Z.; Staino, A.; Basu, B.; Nielsen, S.R.K. Performance evaluation of full-scale tuned liquid dampers (TLDs) for vibration control of large wind turbines using real-time hybrid testing. Eng. Struct. 2016, 126, 417–431. [Google Scholar] [CrossRef]
- Zhang, Z.; Nielsen, S.R.K.; Basu, B.; Li, J. Nonlinear modeling of tuned liquid dampers (TLDs) in rotating wind turbine blades for damping edgewise vibrations. J. Fluids Struct. 2015, 59, 252–269. [Google Scholar] [CrossRef]
- Zuo, H.; Bi, K.; Hao, H. Using multiple tuned mass dampers to control offshore wind turbine vibrations under multiple hazards. Eng. Struct. 2017, 141, 303–315. [Google Scholar] [CrossRef]
- Song, G.B.; Zhang, P.; Li, L.Y.; Singla, M.; Patil, D.; Li, H.N.; Mo, Y.L. Vibration Control of a Pipeline Structure Using Pounding Tuned Mass Damper. J. Eng. Mech. 2016, 142, 04016031. [Google Scholar] [CrossRef]
- Lin, W.-H.; Chopra, A.K. Earthquake response of elastic SDF systems with non-linear fluid viscous dampers. Earthq. Eng. Struct. Dyn. 2002, 31, 1623–1642. [Google Scholar] [CrossRef]
- Wang, W.; Wang, X.; Hua, X.; Song, G.; Chen, Z. Vibration control of vortex-induced vibrations of a bridge deck by a single-side pounding tuned mass damper. Eng. Struct. 2018, 173, 61–75. [Google Scholar] [CrossRef]
- Lin, W.; Song, G.; Chen, S. PTMD Control on a Benchmark TV Tower under Earthquake and Wind Load Excitations. Appl. Sci. 2017, 7, 425. [Google Scholar] [CrossRef]
- Zhang, P.; Song, G.; Li, H.-N.; Lin, Y.-X. Seismic Control of Power Transmission Tower Using Pounding TMD. J. Eng. Mech. 2013, 139, 1395–1406. [Google Scholar] [CrossRef]
- Huang, Z.W.; Hua, X.G.; Chen, Z.Q.; Niu, H.W. Modeling, Testing, and Validation of an Eddy Current Damper for Structural Vibration Control. J. Aerosp. Eng. 2018, 31, 04018063. [Google Scholar] [CrossRef]
- Shen, W.; Zhu, S.; Xu, Y. An experimental study on self-powered vibration control and monitoring system using electromagnetic TMD and wireless sensors. Sens. Actuators A Phys. 2012, 180, 166–176. [Google Scholar] [CrossRef] [Green Version]
- Shen, W.; Zhu, S.; Zhu, H.; Xu, Y. Electromagnetic energy harvesting from structural vibrations during earthquakes. Smart Struct. Syst. 2016, 18, 449–470. [Google Scholar] [CrossRef]
- Shen, W.; Zhu, S.; Zhu, H. Unify Energy Harvesting and Vibration Control Functions in Randomly Excited Structures with Electromagnetic Devices. J. Eng. Mech. 2019, 145, 04018115. [Google Scholar] [CrossRef]
- Zuo, L.; Chen, X.; Nayfeh, S. Design and Analysis of a New Type of Electromagnetic Damper With Increased Energy Density. J. Vib. Acoust. 2011, 133, 041006. [Google Scholar] [CrossRef]
- Chen, Z. Outer Cup Rotary Axial Eddy Current Damper. 15 September 2014. [Google Scholar]
- Pérez-Díaz, J.; Valiente-Blanco, I.; Cristache, C. Z-Damper: A New Paradigm for Attenuation of Vibrations. Machines 2016, 4, 12. [Google Scholar] [CrossRef]
- Wouterse, J.H. Critical torque and speed of eddy current brake with widely separated soft iron poles. IEE Proc. B (Electr. Power Appl.) 1991, 138, 153. [Google Scholar] [CrossRef]
- Constantinou, M.C.; Soong, T.T.; Dargush, G.F. Passive Energy Dissipation Systems for Structural Design and Retrofit; MCEER Monograph No. MCEER-98-MN01, SUNY; UBIR: Buffalo, NY, USA, 1998. [Google Scholar]
- Nehl, T.W.; Lequesne, B.; Gangla, V.; Gutkowski, S.A.; Robinson, M.J.; Sebastian, T. Nonlinear two-dimensional finite element modeling of permanent magnet eddy current couplings and brakes. IEEE Trans. Magn. 1994, 30, 3000–3003. [Google Scholar] [CrossRef]
- Canova, A.; Vusini, B. Analytical modeling of rotating eddy-current couplers. IEEE Trans. Magn. 2005, 41, 24–35. [Google Scholar] [CrossRef]
- Sharif, S.; Faiz, J.; Sharif, K. Performance analysis of a cylindrical eddy current brake. IET Electr. Power Appl. 2012, 6, 661. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Seismic Wave | Without Damper (m) | FVD-SDOF | ECD-SDOF | |||
|---|---|---|---|---|---|---|
| PDR (m) | PDR (m) | |||||
| Elcentro | 0.1553 | 0.2 | 0.0097 | 93.75% | 0.0158 | 89.81% |
| 0.4 | 0.0200 | 87.12% | 0.0186 | 88.04% | ||
| 0.6 | 0.0324 | 79.12% | 0.0273 | 82.43% | ||
| 0.8 | 0.0404 | 73.96% | 0.0333 | 78.56% | ||
| 1 | 0.0498 | 67.91% | 0.0441 | 71.63% | ||
| Irpinia | 0.1977 | 0.2 | 0.0399 | 79.82% | 0.0416 | 78.97% |
| 0.4 | 0.0634 | 67.92% | 0.0579 | 70.69% | ||
| 0.6 | 0.0846 | 57.22% | 0.0724 | 63.39% | ||
| 0.8 | 0.1033 | 47.75% | 0.0890 | 54.95% | ||
| 1 | 0.1155 | 41.54% | 0.1049 | 46.94% | ||
| ChiChi | 1.0532 | 0.2 | 0.0225 | 97.86% | 0.0225 | 97.86% |
| 0.4 | 0.0321 | 96.95% | 0.0316 | 97.00% | ||
| 0.6 | 0.0460 | 95.63% | 0.0417 | 96.04% | ||
| 0.8 | 0.0967 | 90.81% | 0.0561 | 94.67% | ||
| 1 | 0.1640 | 84.43% | 0.0787 | 92.53% | ||
| Kobe | 0.1271 | 0.2 | 0.0817 | 35.67% | 0.0778 | 38.80% |
| 0.4 | 0.0883 | 30.48% | 0.0802 | 36.89% | ||
| 0.6 | 0.0950 | 25.24% | 0.0863 | 32.11% | ||
| 0.8 | 0.0963 | 24.19% | 0.0936 | 26.37% | ||
| 1 | 0.0969 | 23.76% | 0.0981 | 22.80% | ||
| Northridge | 0.1441 | 0.2 | 0.0178 | 87.68% | 0.0161 | 88.82% |
| 0.4 | 0.0300 | 79.18% | 0.0248 | 82.76% | ||
| 0.6 | 0.0373 | 74.13% | 0.0329 | 77.15% | ||
| 0.8 | 0.0458 | 68.23% | 0.0396 | 72.50% | ||
| 1 | 0.0578 | 59.92% | 0.0447 | 68.97% | ||
| Niigat | 0.4533 | 0.2 | 0.0220 | 95.14% | 0.0252 | 94.43% |
| 0.4 | 0.0426 | 90.59% | 0.0384 | 91.52% | ||
| 0.6 | 0.0721 | 84.10% | 0.0554 | 87.77% | ||
| 0.8 | 0.1208 | 73.34% | 0.0795 | 82.47% | ||
| 1 | 0.1733 | 61.77% | 0.1023 | 77.44% | ||
| Loma Prieta | 0.1475 | 0.2 | 0.0749 | 49.21% | 0.0636 | 56.84% |
| 0.4 | 0.0652 | 55.80% | 0.0669 | 54.62% | ||
| 0.6 | 0.0646 | 56.17% | 0.0687 | 53.43% | ||
| 0.8 | 0.0636 | 56.86% | 0.0695 | 52.89% | ||
| 1 | 0.0684 | 53.59% | 0.0673 | 54.34% | ||
| Iwate | 0.6960 | 0.2 | 0.0466 | 93.30% | 0.0362 | 94.81% |
| 0.4 | 0.0629 | 90.96% | 0.0511 | 92.66% | ||
| 0.6 | 0.0830 | 88.07% | 0.0726 | 89.57% | ||
| 0.8 | 0.1304 | 81.26% | 0.0931 | 86.62% | ||
| 1 | 0.1767 | 74.61% | 0.1150 | 83.48% | ||
| Seismic Wave | Without Damper (m/s2) | SDOF-FVD | SDOF-ECD | |||
|---|---|---|---|---|---|---|
| PAR (m/s2) | PAR (m/s2) | |||||
| Elcentro | 2.98 | 0.2 | 2.57 | 13.60% | 2.55 | 14.43% |
| 0.4 | 2.69 | 9.58% | 2.59 | 13.09% | ||
| 0.6 | 2.72 | 8.68% | 2.75 | 7.54% | ||
| 0.8 | 2.88 | 3.13% | 2.81 | 5.54% | ||
| 1 | 2.93 | 1.59% | 2.86 | 3.99% | ||
| Irpinia | 3.08 | 0.2 | 2.96 | 3.92% | 3.05 | 0.89% |
| 0.4 | 2.84 | 7.80% | 2.84 | 7.77% | ||
| 0.6 | 2.98 | 3.29% | 2.92 | 5.16% | ||
| 0.8 | 2.98 | 3.12% | 2.94 | 4.40% | ||
| 1 | 3.01 | 2.20% | 2.97 | 3.39% | ||
| ChiChi | 3.26 | 0.2 | 2.57 | 21.14% | 2.56 | 21.54% |
| 0.4 | 2.78 | 14.67% | 2.74 | 15.78% | ||
| 0.6 | 2.91 | 10.83% | 2.85 | 12.70% | ||
| 0.8 | 2.97 | 8.72% | 2.92 | 10.51% | ||
| 1 | 3.05 | 6.49% | 2.95 | 9.47% | ||
| Kobe | 3.13 | 0.2 | 2.54 | 18.77% | 2.54 | 18.71% |
| 0.4 | 2.81 | 10.21% | 2.78 | 11.26% | ||
| 0.6 | 3.02 | 3.48% | 2.92 | 6.75% | ||
| 0.8 | 3.11 | 0.71% | 3.02 | 3.45% | ||
| 1 | 3.12 | 0.42% | 3.08 | 1.70% | ||
| Northridge | 2.99 | 0.2 | 2.55 | 14.65% | 2.51 | 15.96% |
| 0.4 | 2.71 | 9.43% | 2.66 | 11.00% | ||
| 0.6 | 2.85 | 4.72% | 2.75 | 7.91% | ||
| 0.8 | 2.92 | 2.14% | 2.87 | 4.07% | ||
| 1 | 2.98 | 0.26% | 2.90 | 2.88% | ||
| Niigat | 3.10 | 0.2 | 2.79 | 10.10% | 2.78 | 10.52% |
| 0.4 | 2.94 | 5.22% | 2.88 | 6.99% | ||
| 0.6 | 2.96 | 4.48% | 2.94 | 5.16% | ||
| 0.8 | 3.01 | 3.03% | 2.97 | 4.17% | ||
| 1 | 3.01 | 2.85% | 2.99 | 3.45% | ||
| Loma Prieta | 3.11 | 0.2 | 3.14 | −1.16% | 2.96 | 4.63% |
| 0.4 | 3.06 | 1.49% | 3.03 | 2.35% | ||
| 0.6 | 2.97 | 4.51% | 3.03 | 2.46% | ||
| 0.8 | 2.96 | 4.77% | 2.97 | 4.34% | ||
| 1 | 3.02 | 2.80% | 2.94 | 5.34% | ||
| Iwate | 3.18 | 0.2 | 2.61 | 17.77% | 2.82 | 11.19% |
| 0.4 | 2.98 | 6.15% | 2.96 | 6.75% | ||
| 0.6 | 3.03 | 4.49% | 3.03 | 4.62% | ||
| 0.8 | 3.12 | 1.88% | 3.07 | 3.47% | ||
| 1 | 3.09 | 2.73% | 3.09 | 2.58% | ||
| Seismic Wave | SDOF-FVD | SDOF-ECD | ||||
|---|---|---|---|---|---|---|
| Normalized Energy | ER | Normalized Energy | ER | |||
| Elcentro | 0.2 | 0.9974 | 383.51 | 0.9967 | 302.27 | |
| 0.4 | 0.9946 | 183.40 | 0.9946 | 185.37 | ||
| 0.6 | 0.9892 | 91.83 | 0.9915 | 117.22 | ||
| 0.8 | 0.9801 | 49.14 | 0.9870 | 75.77 | ||
| 1 | 0.9648 | 27.38 | 0.9808 | 50.98 | ||
| Irpinia | 0.2 | 0.9955 | 219.02 | 0.9950 | 199.28 | |
| 0.4 | 0.9914 | 114.72 | 0.9920 | 123.24 | ||
| 0.6 | 0.9857 | 68.99 | 0.9881 | 83.02 | ||
| 0.8 | 0.9771 | 42.62 | 0.9837 | 60.25 | ||
| 1 | 0.9649 | 27.50 | 0.9783 | 45.18 | ||
| ChiChi | 0.2 | 0.9976 | 424.25 | 0.9973 | 372.16 | |
| 0.4 | 0.9947 | 187.15 | 0.9950 | 200.18 | ||
| 0.6 | 0.9894 | 92.95 | 0.9919 | 122.12 | ||
| 0.8 | 0.9798 | 48.40 | 0.9877 | 80.03 | ||
| 1 | 0.9649 | 27.50 | 0.9822 | 55.29 | ||
| Kobe | 0.2 | 0.9919 | 122.42 | 0.9926 | 133.27 | |
| 0.4 | 0.9892 | 91.89 | 0.9898 | 97.12 | ||
| 0.6 | 0.9839 | 60.99 | 0.9868 | 74.52 | ||
| 0.8 | 0.9759 | 40.58 | 0.9833 | 58.78 | ||
| 1 | 0.9649 | 27.50 | 0.9792 | 47.06 | ||
| Northridge | 0.2 | 0.9974 | 383.35 | 0.9974 | 381.09 | |
| 0.4 | 0.9943 | 173.06 | 0.9946 | 185.42 | ||
| 0.6 | 0.9889 | 89.46 | 0.9912 | 113.20 | ||
| 0.8 | 0.9799 | 48.71 | 0.9871 | 76.30 | ||
| 1 | 0.9649 | 27.50 | 0.9818 | 54.08 | ||
| Niigat | 0.2 | 0.9968 | 315.39 | 0.9969 | 322.72 | |
| 0.4 | 0.9944 | 178.90 | 0.9947 | 189.16 | ||
| 0.6 | 0.9889 | 89.25 | 0.9917 | 119.90 | ||
| 0.8 | 0.9789 | 46.43 | 0.9874 | 78.53 | ||
| 1 | 0.9649 | 27.50 | 0.9824 | 55.89 | ||
| Loma Prieta | 0.2 | 0.9910 | 110.46 | 0.9930 | 140.99 | |
| 0.4 | 0.9895 | 94.66 | 0.9902 | 101.01 | ||
| 0.6 | 0.9843 | 62.67 | 0.9871 | 76.57 | ||
| 0.8 | 0.9763 | 41.12 | 0.9835 | 59.72 | ||
| 1 | 0.9649 | 27.47 | 0.9794 | 47.57 | ||
| Iwate | 0.2 | 0.9966 | 296.45 | 0.9963 | 267.73 | |
| 0.4 | 0.9942 | 171.17 | 0.9939 | 162.51 | ||
| 0.6 | 0.9882 | 83.77 | 0.9909 | 108.47 | ||
| 0.8 | 0.9785 | 45.54 | 0.9869 | 75.48 | ||
| 1 | 0.9649 | 27.50 | 0.9824 | 55.78 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, L.; Feng, Z.; Chen, Z. Seismic Control of SDOF Systems with Nonlinear Eddy Current Dampers. Appl. Sci. 2019, 9, 3427. https://doi.org/10.3390/app9163427
Liang L, Feng Z, Chen Z. Seismic Control of SDOF Systems with Nonlinear Eddy Current Dampers. Applied Sciences. 2019; 9(16):3427. https://doi.org/10.3390/app9163427
Chicago/Turabian StyleLiang, Longteng, Zhouquan Feng, and Zhengqing Chen. 2019. "Seismic Control of SDOF Systems with Nonlinear Eddy Current Dampers" Applied Sciences 9, no. 16: 3427. https://doi.org/10.3390/app9163427