Development of High-Efficiency, High-Speed and High-Pressure Ambient Temperature Filling System Using Pulse Volume Measurement


Abstract
:1. Introduction
2. Hardware Composition
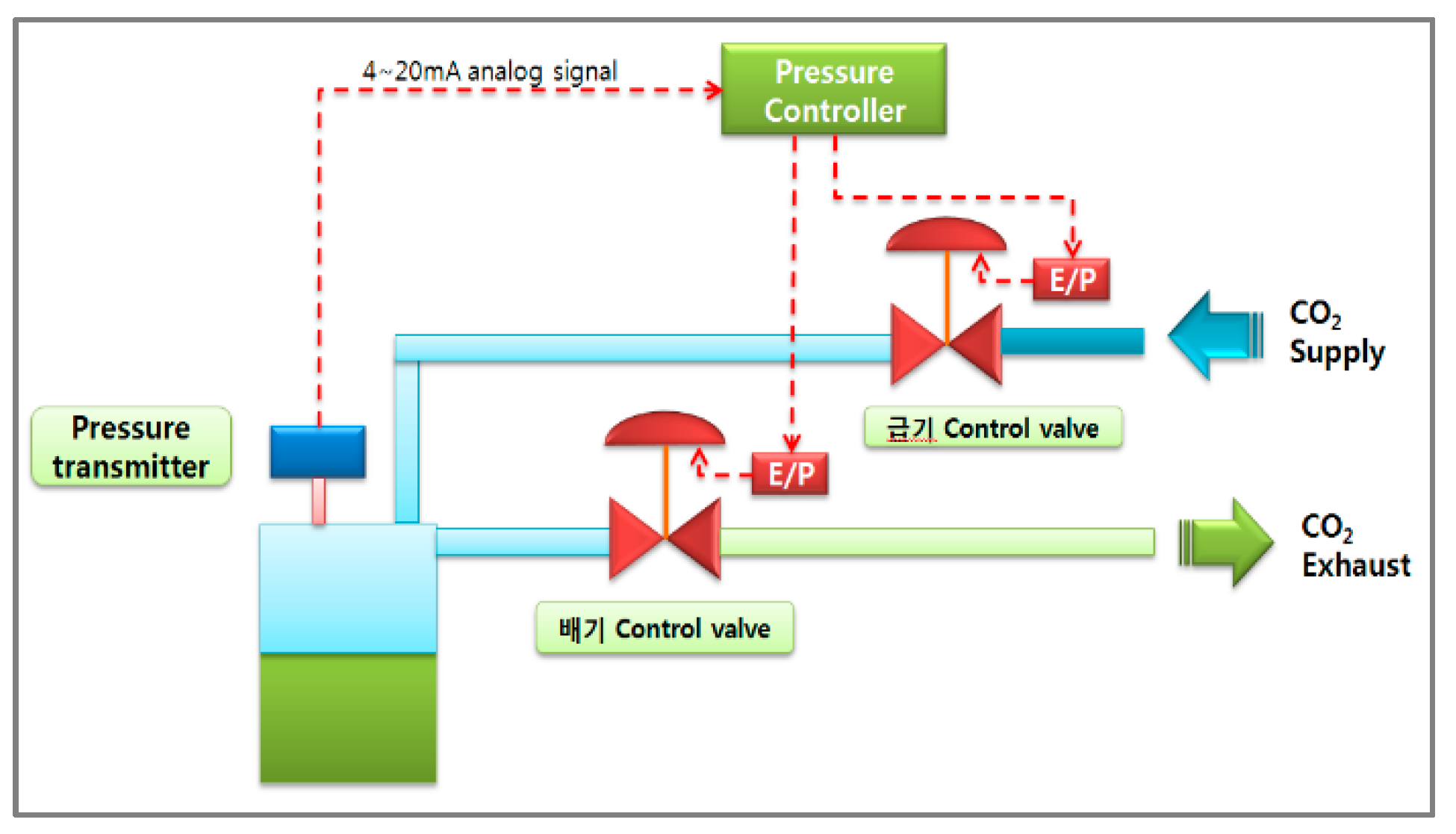
2.1. Component of the Flow Rate Filling System
2.2. Design of Filling Valve
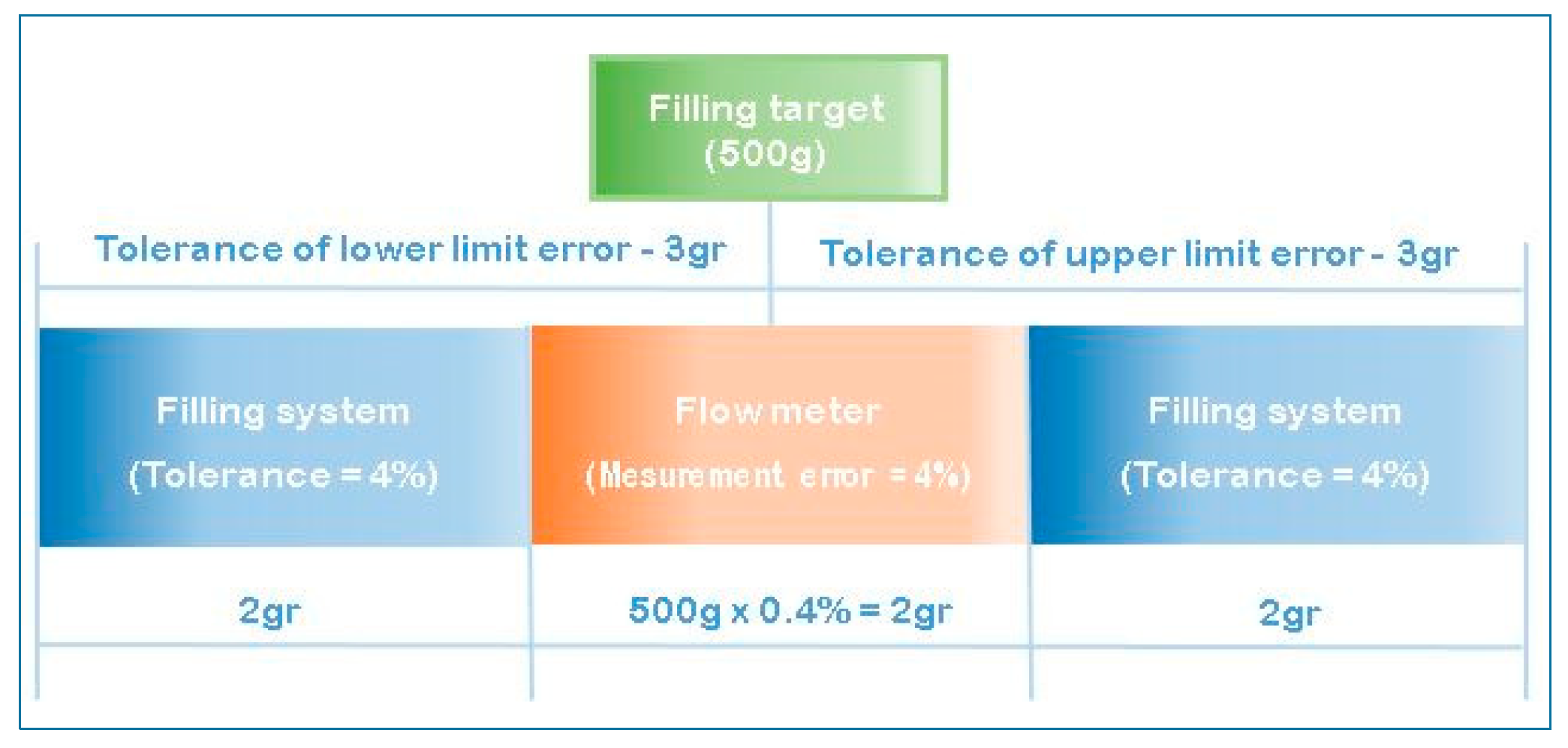
3. Filling Precision Design
3.1. The Control Method to Increase the Precision Level of Filling
3.2. Control Algorithm to Increase the Precision Level of Filling
3.2.1. Structured Function Block Program
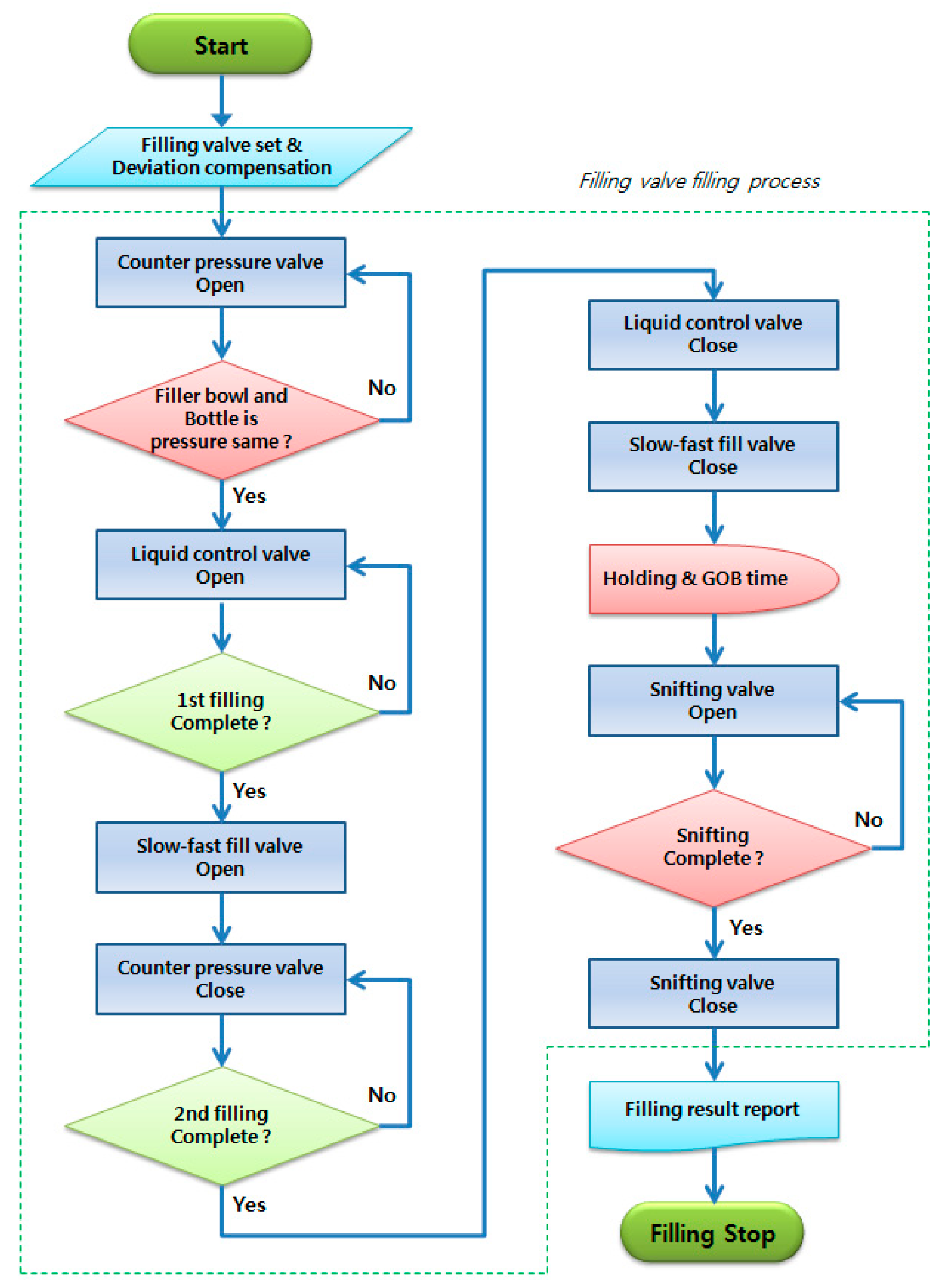
3.2.2. Filling Processing Algorithm
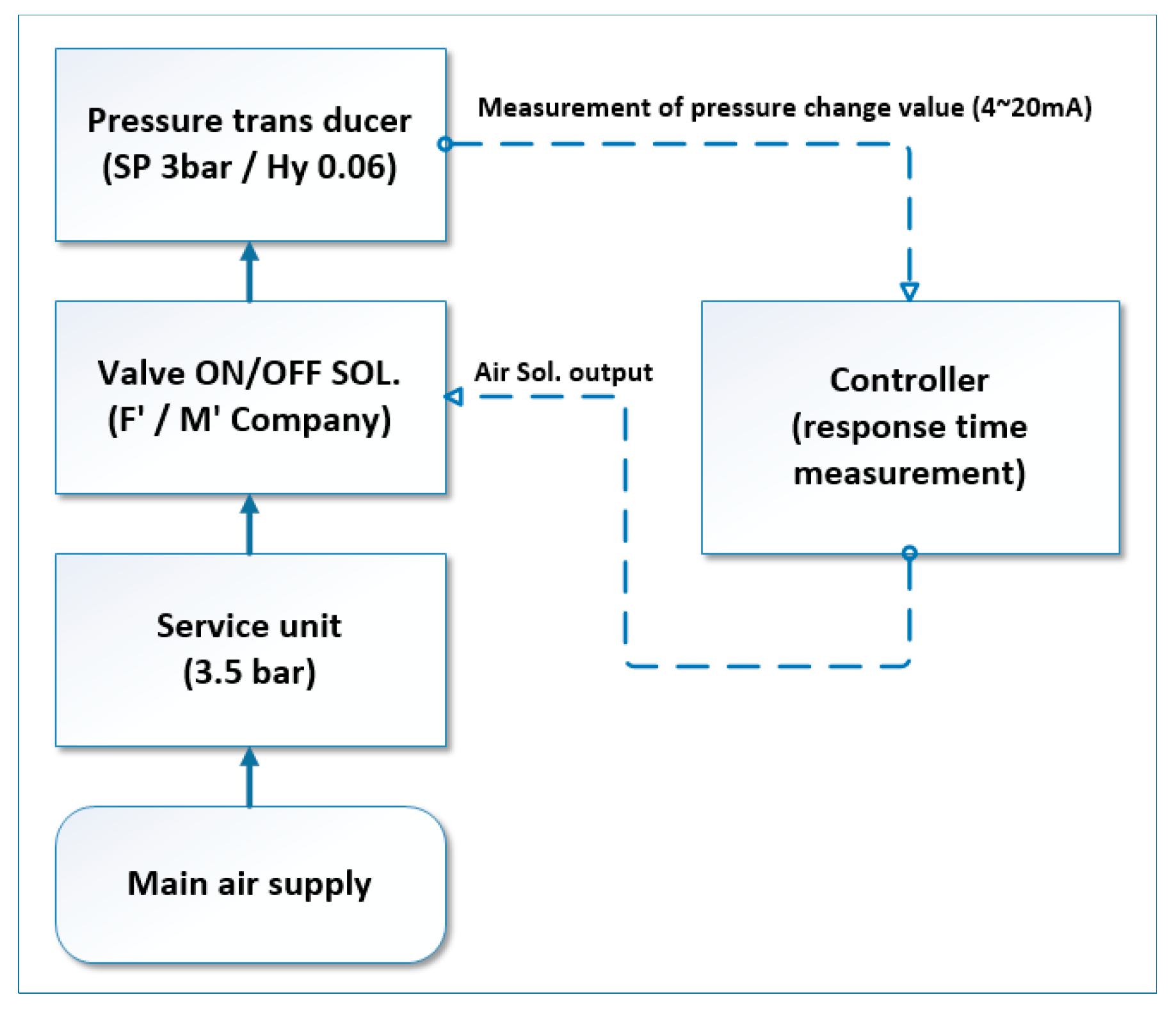
3.3. Experimental Design of Filling Valve Response
4. Results and Discussion
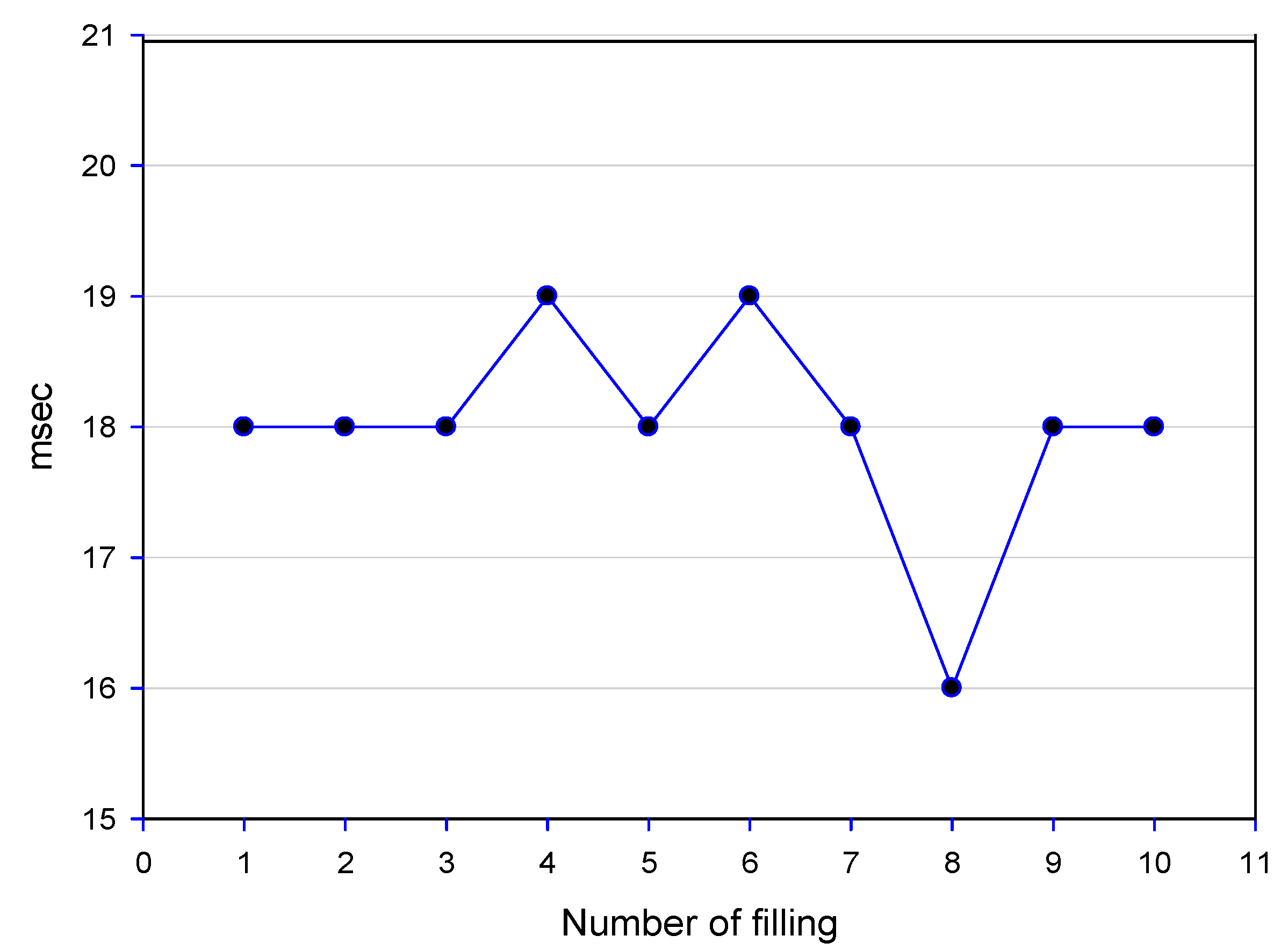
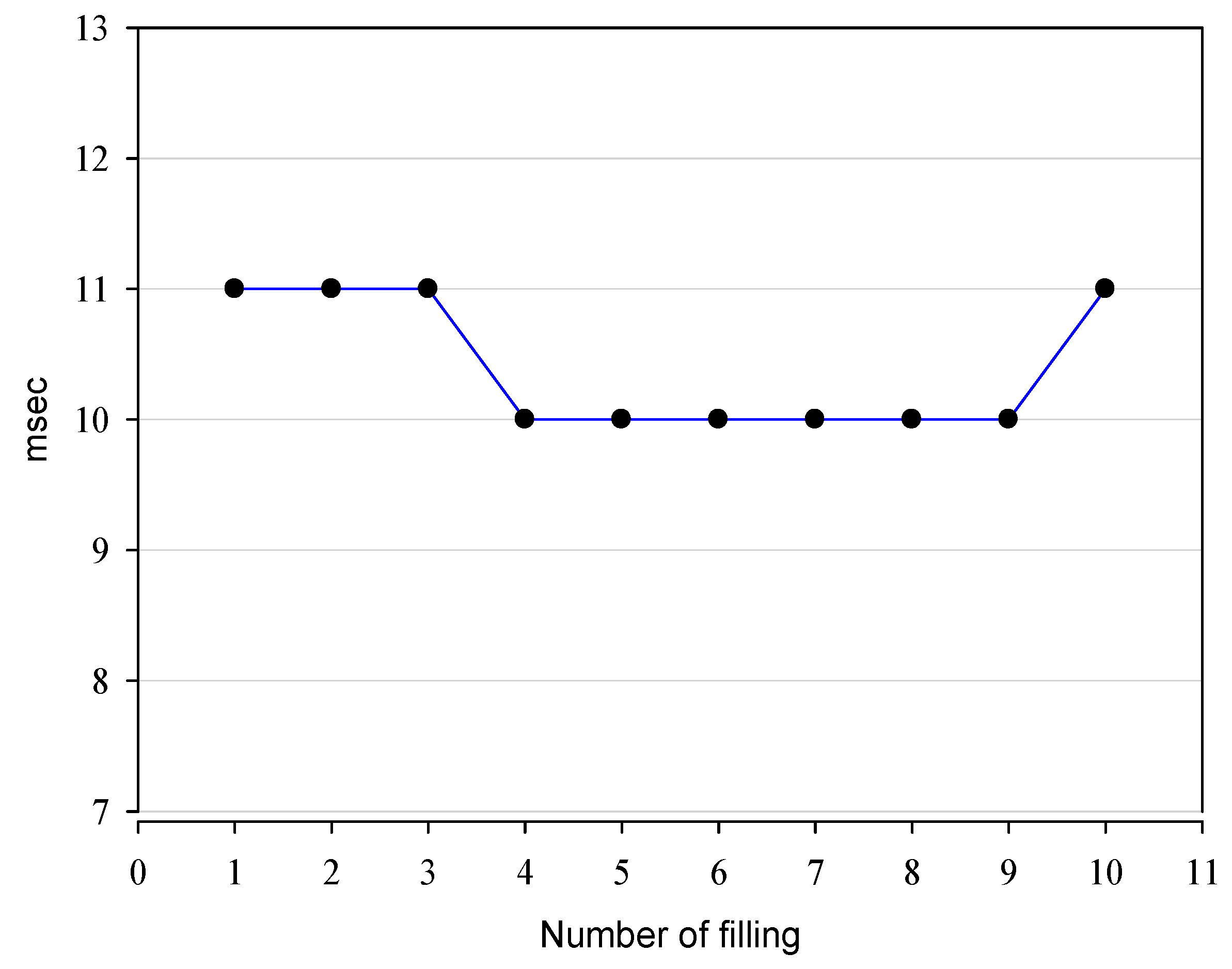
4.1. Analysis of the Response Characteristics of the Filling Valve
4.2. Comparison of the response characteristics of the filling valve
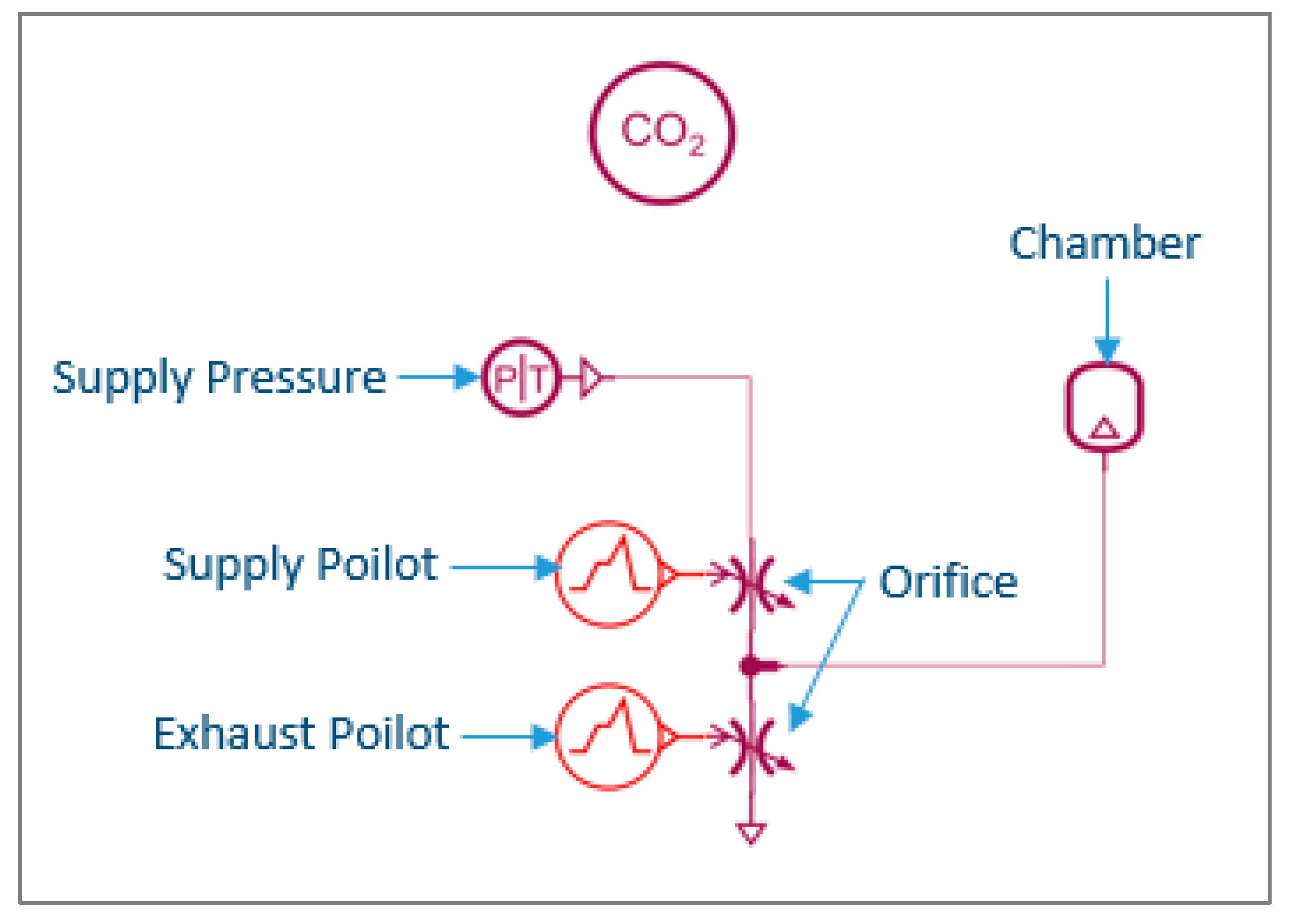
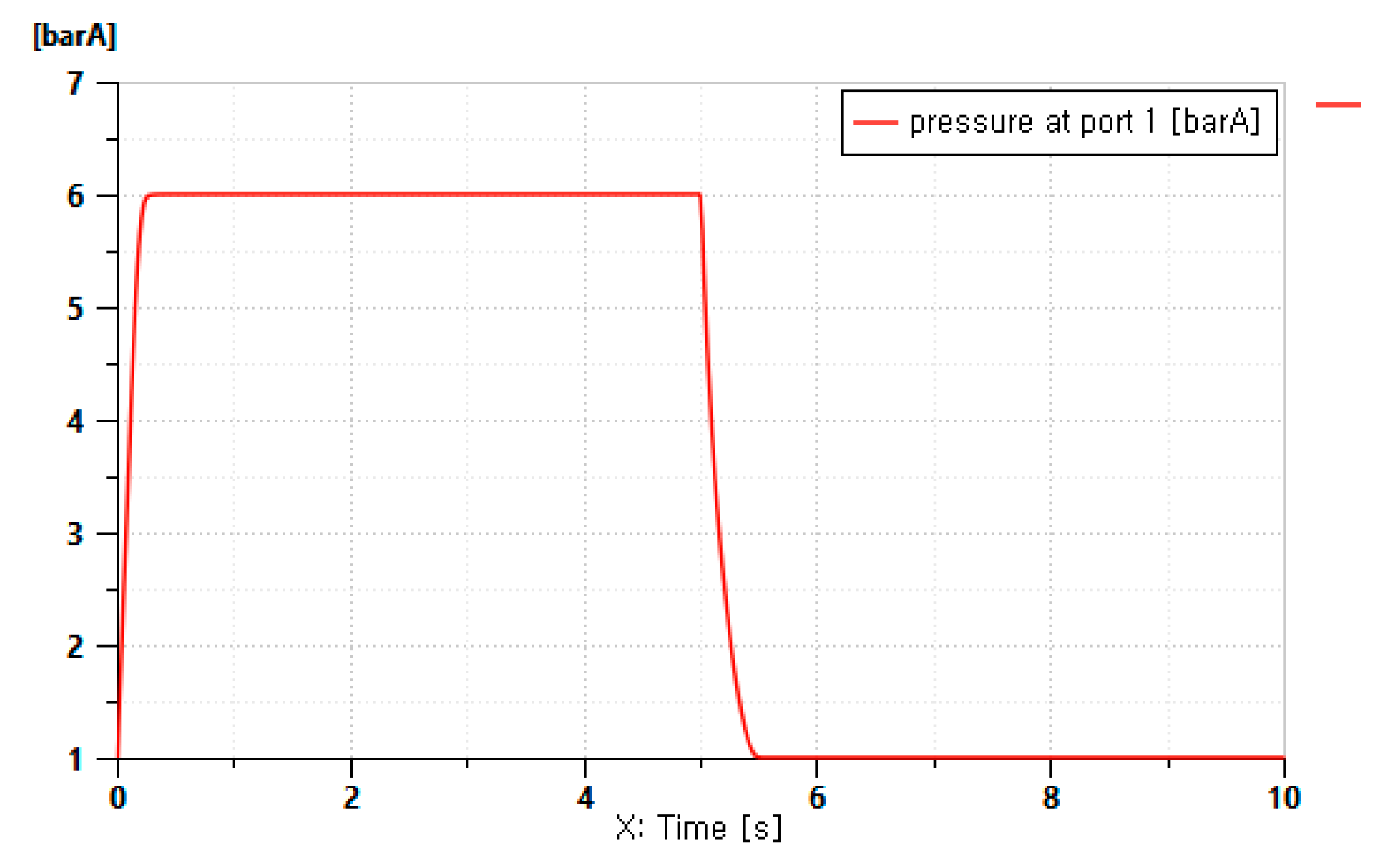
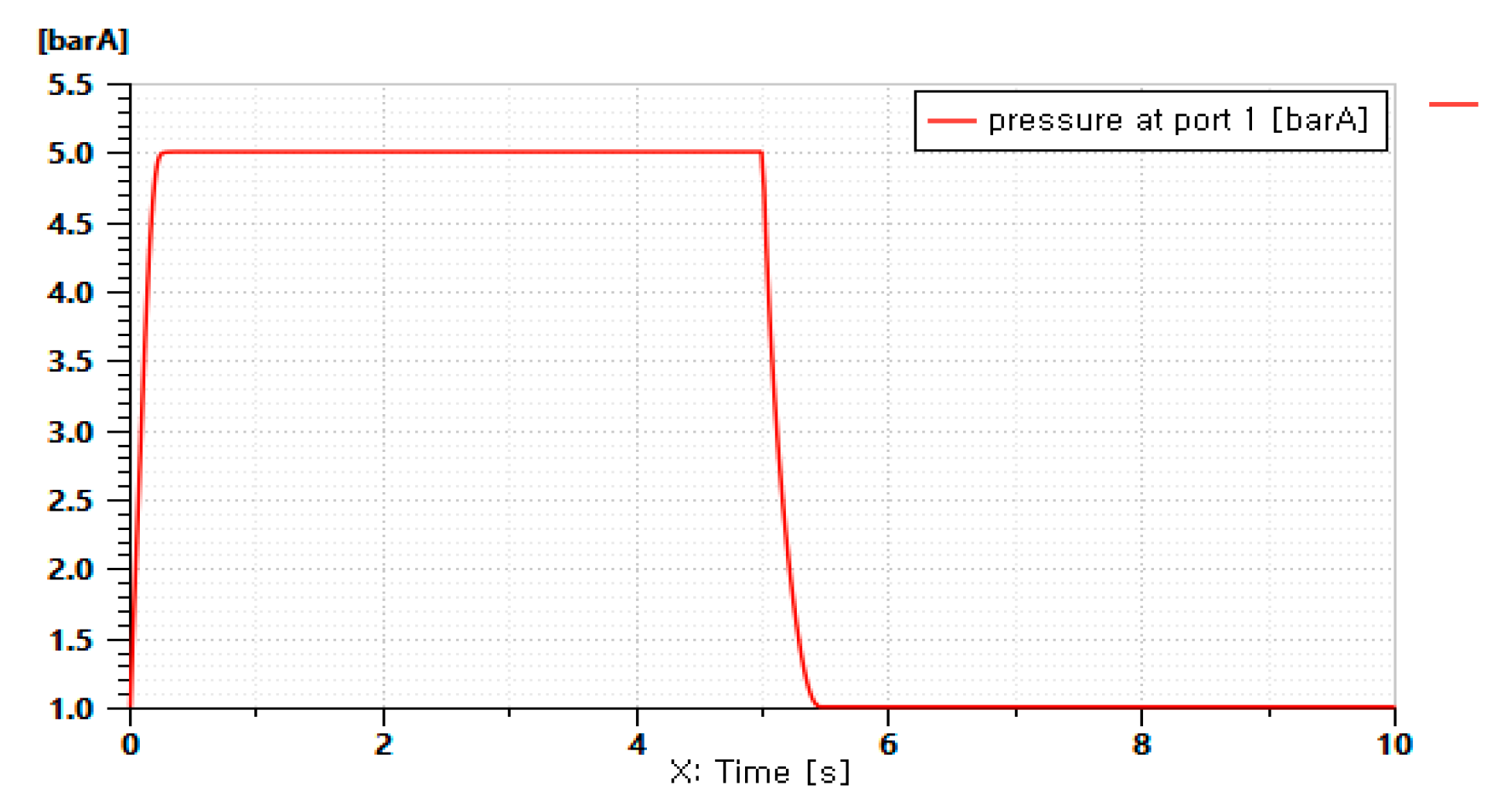
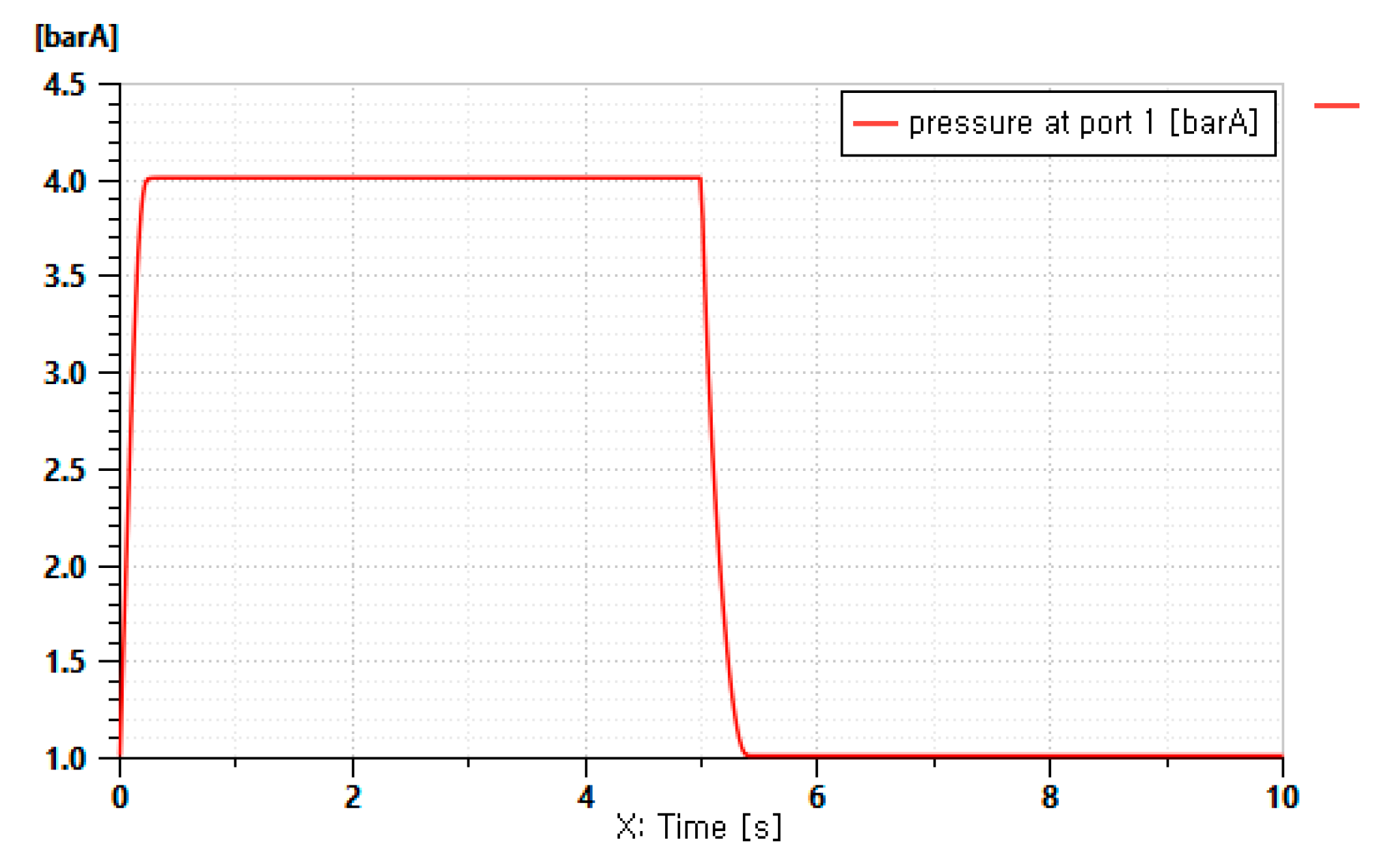
4.3. Counter Pressure and Exhaust Time Analysis of the Chamber
- -
- Chamber volume: 523 cc
- -
- Temperature: 293 K
- -
- Supply pressure: 5 bar
- -
- Orifice area: 19.625 mm2
- -
- Chamber initial pressure: 1.013 bar
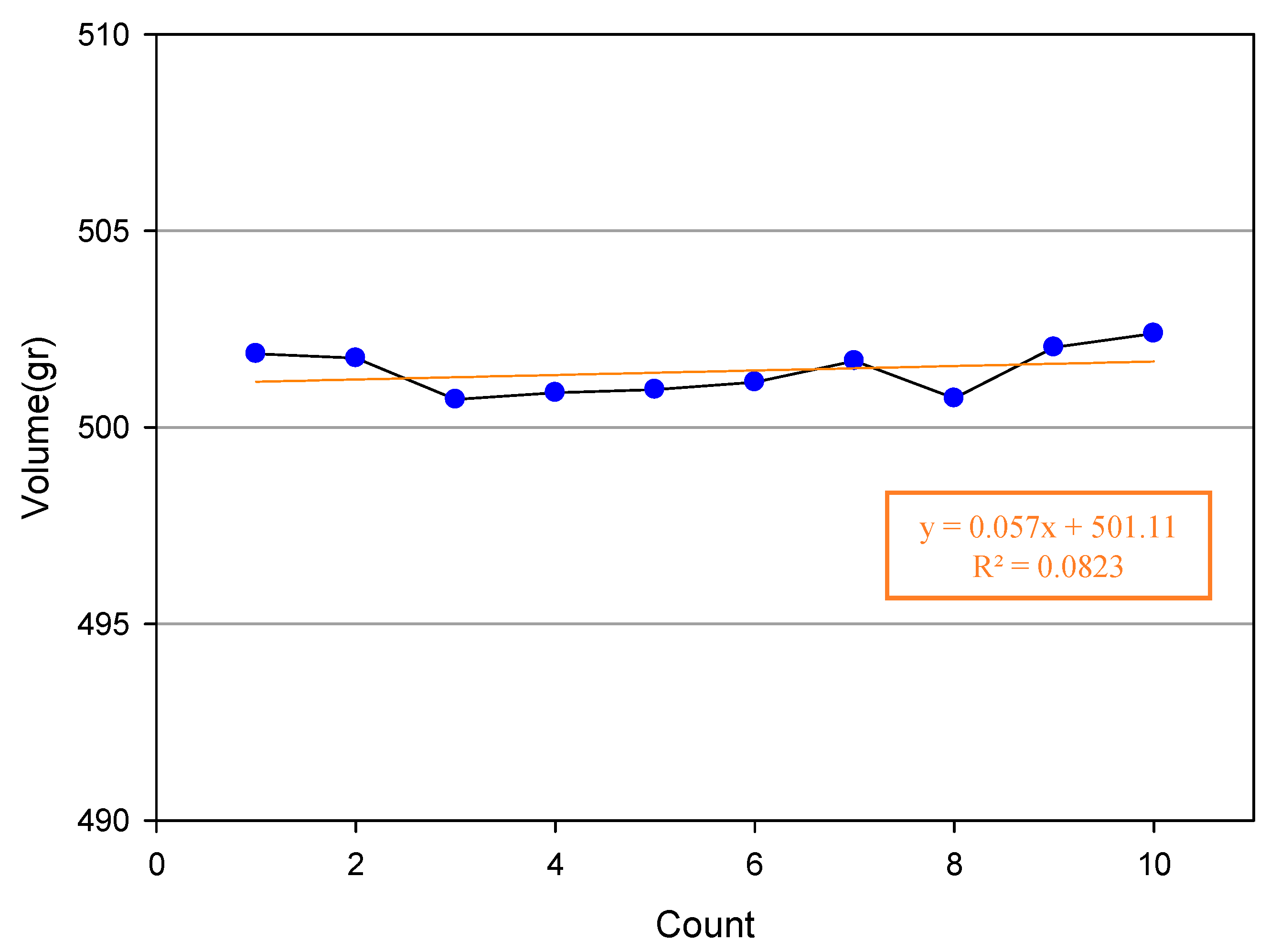
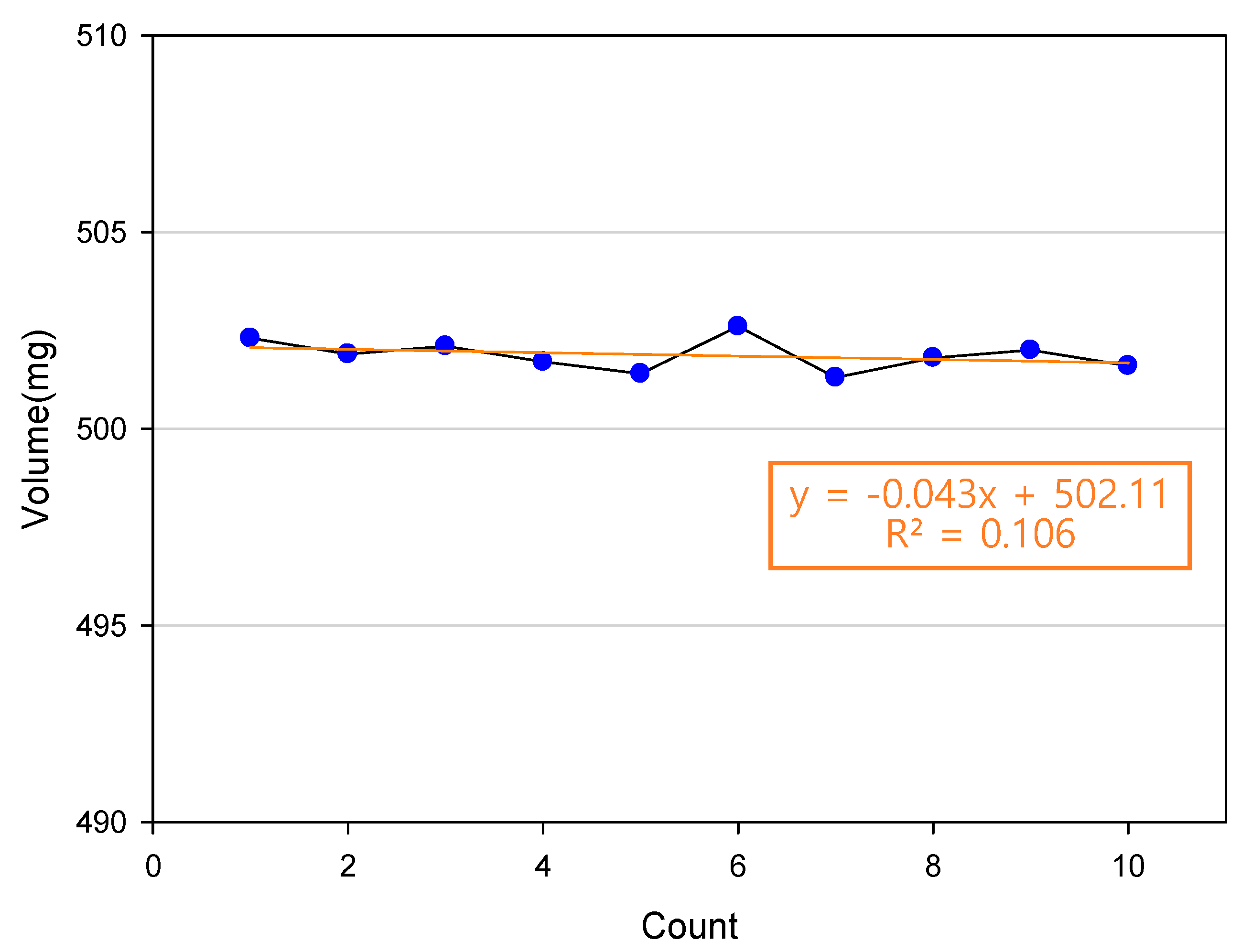
4.4. Performance Evaluation of the Developed Valve
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Gas pressure in the pilot cavity | |
| Pressure in the orifice inlet | |
| Cavity volume when initial stroke is 0 | |
| Gas temperature in the pilot cavity | |
| Flow to pilot cavity | |
| Flow through the orifice in the pilot cavity | |
| Surface area of the orifice | |
| Flow coefficient | |
| Gas inlet temperature | |
| Gas constant | |
| Travel distance of the bellows | |
| Chamber supply absolute pressure (Mpa) | |
| Chamber capacity (cm2) | |
| Orifice effective section area (cm2) |
References
- Thriveni, T.; Ahn, Y.J.; Choon, H.; Chilakala, R.; Ahn, J.W. A Strategy of Precipitated Calcium Carbonate (CaCO3) Fillers for Enhancing the Mechanical Properties of Polypropylene Polymers. Korean J. Chem. Eng. 2015, 32, 206–215. [Google Scholar]
- Eblinger, H.M. Handbook of Brewing: Processes, Technology, Markets; Wiley-VCH: Weinheim, Germany, 2009; pp. 292–293. [Google Scholar]
- Kuang, S.; Nie, Y. Preliminary Study on Processing Oil-Based Calcium Carbonate Mud (OBCCM) into Rubber Fillers. Environ. Eng. 2006, 24, 45–47. [Google Scholar]
- Middendorf, P.J.; Maclntosh, D.L.; Tow, L.V.; Williams, P.L. Performance of Electronic Flow Rate Meters Used for Calibration of Air Sampling Pumps. Am. Ind. Hyg. Assoc. 2010, 40, 472–476. [Google Scholar]
- Oh, S.B. Rotating-Type High-Speed Fluid Filling System Using Pulse-Type Electronic Flow Meter; WO2016/148325A1; WIPO: Geneva, Switzerland, 2016; pp. 1–23. [Google Scholar]
- Jang, J.S.; Kwon, O.S.; Lee, K.W.; Cho, I.H. Analysis of Operating Characteristics and Design Review of Oxidizer Fill-Drain Valve. Korea Aerosp. Res. Inst. 2011, 10, 79–88. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average | Standard Deviation | Dispe Rsion | Minimum Value | Middle Value | Maximum Value |
|---|---|---|---|---|---|
| 501.9 | 0.38 | 0.14 | 501.3 | 502.0 | 502.6 |
| Average | Standard Deviation | Dispe Rsion | Minimum Value | Middle Value | Maximum Value |
|---|---|---|---|---|---|
| 501.9 | 0.38 | 0.14 | 501.3 | 502.0 | 502.6 |
| Supply Pressure Condition [bar] | AMESim Analysis | |
|---|---|---|
| Counter Pressuring Time [s] | Exhaust Time [s] | |
| 5 | 0.25 | 0.5 |
| 4 | 0.23 | 0.45 |
| 3 | 0.21 | 0.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, S.; Oh, S.; Min, B. Development of High-Efficiency, High-Speed and High-Pressure Ambient Temperature Filling System Using Pulse Volume Measurement. Appl. Sci. 2019, 9, 2491. https://doi.org/10.3390/app9122491
Oh S, Oh S, Min B. Development of High-Efficiency, High-Speed and High-Pressure Ambient Temperature Filling System Using Pulse Volume Measurement. Applied Sciences. 2019; 9(12):2491. https://doi.org/10.3390/app9122491
Chicago/Turabian StyleOh, SeBu, SeHoon Oh, and ByeongRo Min. 2019. "Development of High-Efficiency, High-Speed and High-Pressure Ambient Temperature Filling System Using Pulse Volume Measurement" Applied Sciences 9, no. 12: 2491. https://doi.org/10.3390/app9122491