

Drive-by Bridge Damage Detection Using Continuous Wavelet Transform


Abstract
:1. Introduction
- The proposed method aims to utilize the changes in the static response of the bridge, which was shown to be much more sensitive to damage than its dynamic counterpart. As such, it eliminates the dependence on modal parameters, which are known to be significantly affected by factors other than damage such as environmental factors.
- Unlike the methods that depend on contact point acceleration, the proposed method does not require a priori knowledge about the mechanical properties of the instrumented vehicle such as its suspension stiffness and damping. The only vehicle parameter that is required to apply the proposed framework is the vehicle frequency, which can be easily measured.
- The proposed framework attenuates the negative impacts of road roughness by using the residual accelerations computed as the difference between front-axle and rear-axle accelerations.
- The proposed framework can detect and locate damage in the absence of corresponding data from the undamaged bridge.
2. Numerical Models
3. Continuous Wavelet Transform and Development of the Proposed Method
- Drive the instrumented vehicle over the bridge and record the accelerations at the front and rear axles.
- Subtract the rear-axle accelerations from the front-axle accelerations with a time lag to compute the residual accelerations.
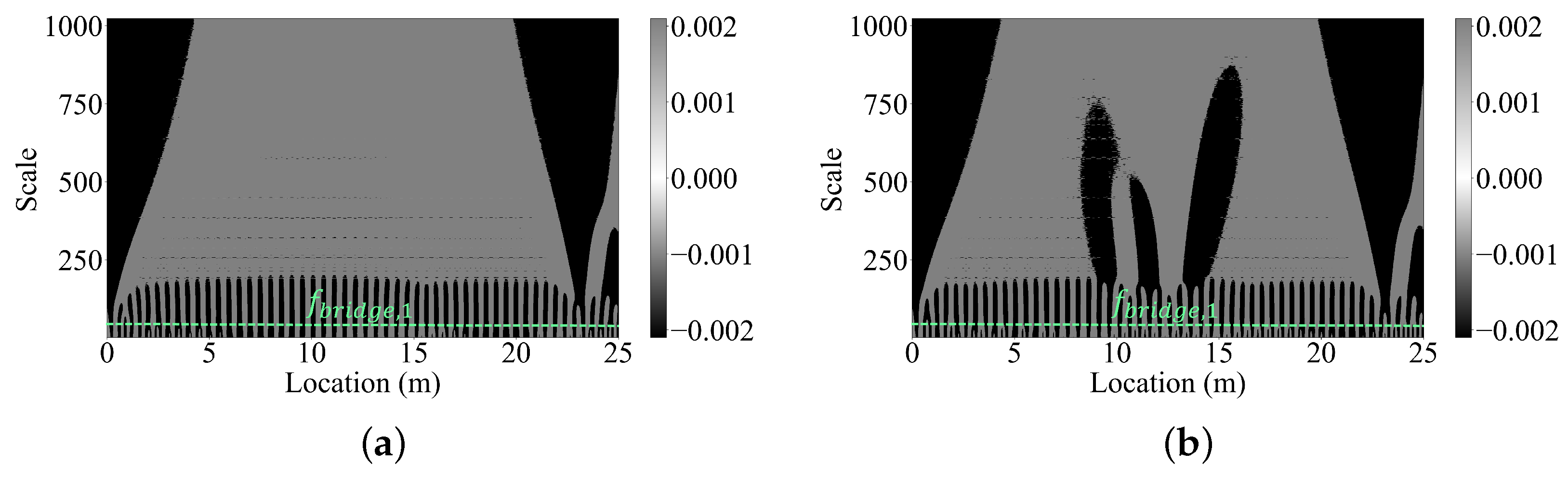
- Conduct a continuous wavelet transform of the residual accelerations to obtain the wavelet coefficient map.
- Determine the window which is sufficiently lower than the scale corresponding to the driving frequency and higher than the scales corresponding to the vehicle and the bridge frequencies. Decide on the scale where the horizontal section will be taken. Although, any scale within this window can be a viable option for the horizontal section, as they correspond to relatively low frequencies that capture static response, some engineering judgment can be required to select the final horizontal section.
- Plot the horizontal section of the WCM at the selected scale for a bridge segment between 0.2 L and 0.8 L and evaluate the variation of the wavelet coefficients over the length of the bridge. Due to the edge effects that are commonly encountered in WCM of signals, the proposed method cannot detect damage that is located between 0–0.2 L and 0.8–1 L.
- If the wavelet coefficients remain stable around zero, the bridge can be assessed to be undamaged. However, disturbances of the wavelet coefficients similar to those in Figure 9 indicate presence of damage.
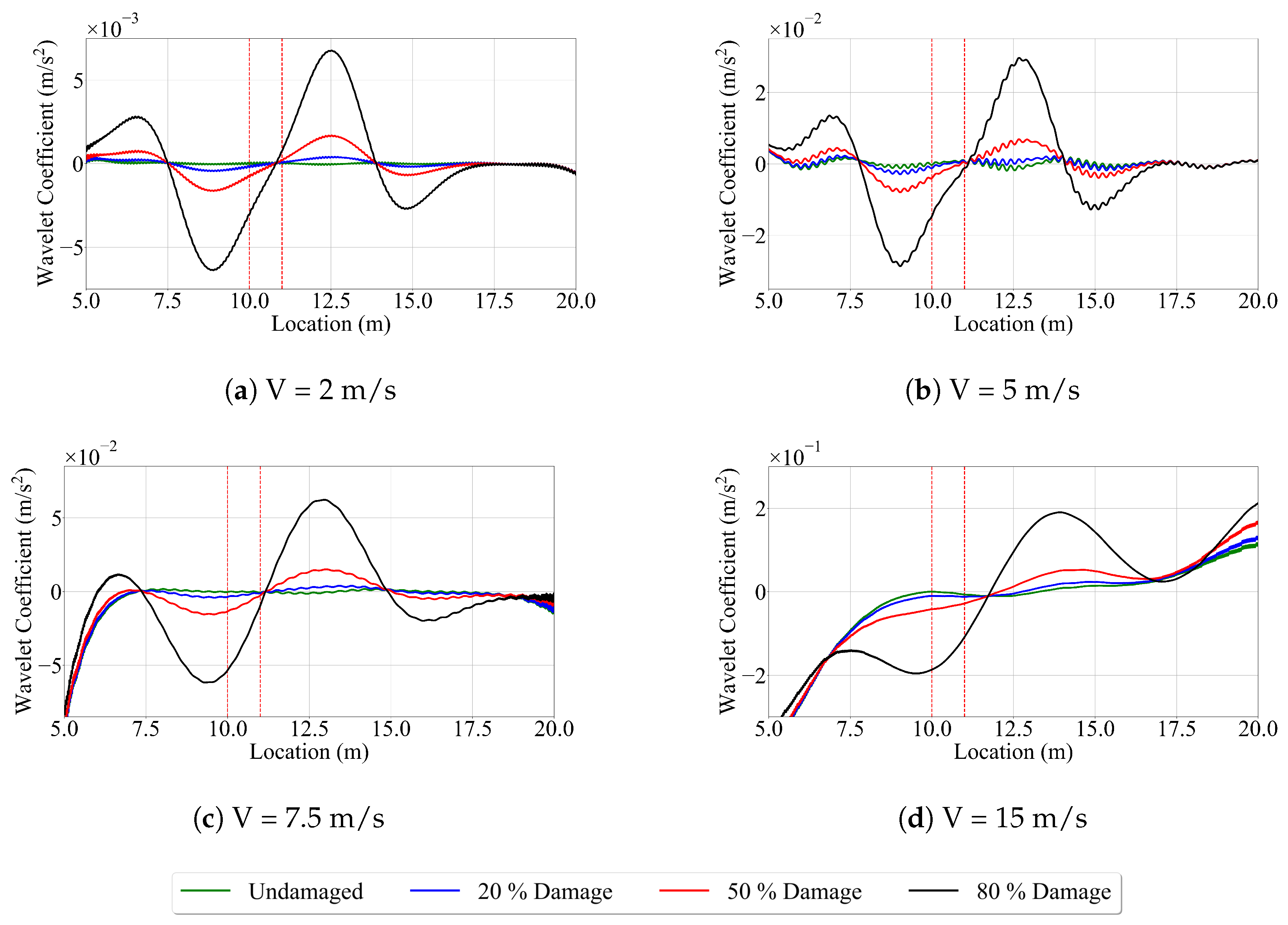
- Once damage is detected, its approximate location can be estimated as the point where the wavelet coefficients crosses the zero line between the negative and the positive peaks of the disturbance; see Figure 9.
4. Parametric Study
4.1. Damage Location and Level
4.2. Vehicle Speed
4.3. Road Roughness Level
4.4. Boundary Conditions
4.5. Multiple Damage
5. Concluding Remarks
- The proposed method can successfully detect damage as low as at different locations of the bridge even in the presence of road roughness.
- The proposed method illustrated that, as the damage level increases, perturbations in the wavelet coefficient maps also increase, potentially facilitating the quantification of damage. However, the proposed method cannot quantify the damage level in its current form when the damage is detected for the first time. However, as the damage propagates with time, repeated application of the proposed method enables the detection of the escalating damage levels.
- The vehicle speed has a negative impact on damage detection using the proposed method because, as the vehicle speed increases the driving frequency becomes closer to the vehicle and bridge frequencies, minimizing the window that we select the scale used for damage detection. Hence, the proposed method should be used with low vehicle speeds to ensure successful damage detection.
- Although using the residual accelerations largely eliminates the negative impacts of road roughness when road roughness is limited to low levels, for higher levels of road roughness, only higher levels of damage can be detected successfully.
- Owing to the edge effects encountered in CWT, the proposed method is constrained to identifying and locating damage in regions where these edge effects are less pronounced.
- When the bridge is seated on relatively soft bearings, the edge effects associated with continuous wavelet transform, is amplified and extends to a longer section of the bridge at the ends. As such, the segment of the bridge where damage can be detected becomes shorter. However, when the damage is close to the middle of the span and sufficiently away from the supports, the proposed method can successfully detect and locate damage.
- The proposed method was also shown to detect and locate presence of multiple damaged sections. In the numerical analysis where we introduced damage in two separate sections of the bridge, we can clearly observe two peaks, both negative and positive, close to the damage locations, while we could only observe a single peak when only one bridge section was damaged. Further, as in the case of single damage, the wavelet coefficients reach a negative peak just before the damage location, increase after this peak, and cross the time axis at the middle of the bridge location before attaining a positive peak. Thus, using the proposed method, we can locate both damaged sections successfully.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Corbally, R.; Malekjafarian, A. A data-driven approach for drive-by damage detection in bridges considering the influence of temperature change. Eng. Struct. 2022, 253, 113783. [Google Scholar] [CrossRef]
- Salehi, M.; Demirlioglu, K.; Erduran, E. Evaluation of the effect of operational modal analysis algorithms on identified modal parameters of railway bridges. In Proceedings of the IABSE Congress, Ghent—Structural Engineering for Future Societal Needs, Ghent, Belgium, 22–24 September 2021; pp. 22–24. [Google Scholar]
- Kamariotis, A.; Chatzi, E.; Straub, D. A framework for quantifying the value of vibration-based structural health monitoring. Mech. Syst. Signal Process. 2023, 184, 109708. [Google Scholar] [CrossRef]
- Gonen, S.; Demirlioglu, K.; Erduran, E. Optimal sensor placement for structural parameter identification of bridges with modeling uncertainties. Eng. Struct. 2023, 292, 116561. [Google Scholar] [CrossRef]
- Erduran, E.; Gonen, S.; Alkanany, A. Parametric analysis of the dynamic response of railway bridges due to vibrations induced by heavy-haul trains. Struct. Infrastruct. Eng. 2022, 20, 326–339. [Google Scholar] [CrossRef]
- Demirlioglu, K.; Gonen, S.; Erduran, E. On the Selection of Mode Shapes Used in Optimal Sensor Placement. In Sensors and Instrumentation, Aircraft/Aerospace and Dynamic Environments Testing, Volume 7: Proceedings of the 40th IMAC, A Conference and Exposition on Structural Dynamics 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 85–92. [Google Scholar]
- Seo, J.; Hu, J.W.; Lee, J. Summary review of structural health monitoring applications for highway bridges. J. Perform. Constr. Facil. 2016, 30, 04015072. [Google Scholar] [CrossRef]
- Huffman, J.T.; Xiao, F.; Chen, G.; Hulsey, J.L. Detection of soil-abutment interaction by monitoring bridge response using vehicle excitation. J. Civ. Struct. Health Monit. 2015, 5, 389–395. [Google Scholar] [CrossRef]
- Gonen, S.; Demirlioglu, K.; Erduran, E. Modal Identification of a Railway Bridge Under Train Crossings: A Comparative Study. In Dynamics of Civil Structures, Volume 2: Proceedings of the 40th IMAC, A Conference and Exposition on Structural Dynamics 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 33–40. [Google Scholar]
- Flammini, F.; Pragliola, C.; Smarra, G. Railway infrastructure monitoring by drones. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; pp. 1–6. [Google Scholar]
- Kalaitzakis, M.; Kattil, S.R.; Vitzilaios, N.; Rizos, D.; Sutton, M. Dynamic structural health monitoring using a DIC-enabled drone. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 321–327. [Google Scholar]
- Yang, Y.B.; Lin, C.; Yau, J. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Hajializadeh, D. Deep learning-based indirect bridge damage identification system. Struct. Health Monit. 2023, 22, 897–912. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; OBrien, E. Drive-by bridge frequency identification under operational roadway speeds employing frequency independent underdamped pinning stochastic resonance (FI-UPSR). Sensors 2018, 18, 4207. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.P. Using acceleration residual spectrum from single two-axle vehicle at contact points to extract bridge frequencies. Eng. Struct. 2022, 266, 114538. [Google Scholar] [CrossRef]
- Erduran, E.; Pettersen, F.M.; Gonen, S.; Lau, A. Identification of Vibration Frequencies of Railway Bridges from Train-Mounted Sensors Using Wavelet Transformation. Sensors 2023, 23, 1191. [Google Scholar] [CrossRef]
- Li, Z.; Lin, W.; Zhang, Y. Bridge Frequency Scanning Using the Contact-Point Response of an Instrumented 3D Vehicle: Theory and Numerical Simulation. Struct. Control Health Monit. 2023, 2023. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Khan, M.A.; OBrien, E.J.; Micu, E.A.; Bowe, C.; Ghiasi, R. Indirect monitoring of frequencies of a multiple span bridge using data collected from an instrumented train: A field case study. Sensors 2022, 22, 7468. [Google Scholar] [CrossRef]
- Sitton, J.D.; Rajan, D.; Story, B.A. Bridge frequency estimation strategies using smartphones. J. Civ. Struct. Health Monit. 2020, 10, 513–526. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Xiang, Z. Damage detection by mode shape squares extracted from a passing vehicle. J. Sound Vib. 2012, 331, 291–307. [Google Scholar] [CrossRef]
- Demirlioglu, K.; Gonen, S.; Erduran, E. Efficacy of vehicle scanning methods in estimating the mode shapes of bridges seated on elastic supports. Sensors 2023, 23, 6335. [Google Scholar] [CrossRef]
- Xu, H.; Liu, Y.; Yang, M.; Yang, D.; Yang, Y. Mode shape construction for bridges from contact responses of a two-axle test vehicle by wavelet transform. Mech. Syst. Signal Process. 2023, 195, 110304. [Google Scholar] [CrossRef]
- He, W.Y.; Ren, W.X.; Zuo, X.H. Mass-normalized mode shape identification method for bridge structures using parking vehicle-induced frequency change. Struct. Control Health Monit. 2018, 25, e2174. [Google Scholar] [CrossRef]
- Demirlioglu, K.; Gonen, S.; Erduran, E. Mode Shape Identification using Drive-by Monitoring: A comparative study. In Society for Experimental Mechanics Annual Conference and Exposition; Springer: Berlin/Heidelberg, Germany, 2023; pp. 57–66. [Google Scholar]
- González, A.; OBrien, E.J.; McGetrick, P. Identification of damping in a bridge using a moving instrumented vehicle. J. Sound Vib. 2012, 331, 4115–4131. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, B.; Chen, Y.; Qian, Y.; Wu, Y. Bridge damping identification by vehicle scanning method. Eng. Struct. 2019, 183, 637–645. [Google Scholar] [CrossRef]
- Shi, Z.; Uddin, N. Extracting multiple bridge frequencies from test vehicle–a theoretical study. J. Sound Vib. 2021, 490, 115735. [Google Scholar] [CrossRef]
- Keenahan, J.; Ren, Y.; OBrien, E.J. Determination of road profile using multiple passing vehicle measurements. Struct. Infrastruct. Eng. 2020, 16, 1262–1275. [Google Scholar] [CrossRef]
- Feng, K.; Casero, M.; González, A. Characterization of the road profile and the rotational stiffness of supports in a bridge based on axle accelerations of a crossing vehicle. Comput. Aided Civ. Infrastruct. Eng. 2023, 38, 1935–1954. [Google Scholar] [CrossRef]
- González, A.; Feng, K.; Casero, M. Detection, localisation and quantification of stiffness loss in a bridge using indirect drive-by measurements. Struct. Infrastruct. Eng. 2023, 2023, 1–19. [Google Scholar] [CrossRef]
- Lin, C.; Yang, Y. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Kim, J.; Lynch, J.P. Experimental analysis of vehicle–bridge interaction using a wireless monitoring system and a two-stage system identification technique. Mech. Syst. Signal Process. 2012, 28, 3–19. [Google Scholar] [CrossRef]
- Siringoringo, D.M.; Fujino, Y. Estimating bridge fundamental frequency from vibration response of instrumented passing vehicle: Analytical and experimental study. Adv. Struct. Eng. 2012, 15, 417–433. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, H.; Zhang, B.; Xiong, F.; Wang, Z. Measuring bridge frequencies by a test vehicle in non-moving and moving states. Eng. Struct. 2020, 203, 109859. [Google Scholar] [CrossRef]
- McGetrick, P.J.; Kim, C.W.; González, A.; Brien, E.J. Experimental validation of a drive-by stiffness identification method for bridge monitoring. Struct. Health Monit. 2015, 14, 317–331. [Google Scholar] [CrossRef]
- Xiao, F.; Sun, H.; Mao, Y.; Chen, G.S. Damage identification of large-scale space truss structures based on stiffness separation method. In Structures; Elsevier: Amsterdam, The Netherlands, 2023; Volume 53, pp. 109–118. [Google Scholar]
- OBrien, E.J.; Malekjafarian, A. A mode shape-based damage detection approach using laser measurement from a vehicle crossing a simply supported bridge. Struct. Control Health Monit. 2016, 23, 1273–1286. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamamoto, K.; Sugiura, K. Damage assessment of a bridge based on mode shapes estimated by responses of passing vehicles. Smart Struct. Syst. 2014, 13, 731–753. [Google Scholar] [CrossRef]
- Zhang, Y.; Lie, S.T.; Xiang, Z. Damage detection method based on operating deflection shape curvature extracted from dynamic response of a passing vehicle. Mech. Syst. Signal Process. 2013, 35, 238–254. [Google Scholar] [CrossRef]
- Tan, C.; Zhao, H.; OBrien, E.J.; Uddin, N.; Fitzgerald, P.C.; McGetrick, P.J.; Kim, C.W. Extracting mode shapes from drive-by measurements to detect global and local damage in bridges. Struct. Infrastruct. Eng. 2021, 17, 1582–1596. [Google Scholar] [CrossRef]
- Tan, C.; Elhattab, A.; Uddin, N. “Drive-by’’ bridge frequency-based monitoring utilizing wavelet transform. J. Civ. Struct. Health Monit. 2017, 7, 615–625. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M.; Boay, M. Indirect health monitoring of bridges using Mel-frequency cepstral coefficients and principal component analysis. Mech. Syst. Signal Process. 2019, 119, 523–546. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M. A crowdsourcing-based methodology using smartphones for bridge health monitoring. Struct. Health Monit. 2019, 18, 1602–1619. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M.; Shirzad-Ghaleroudkhani, N. Towards smart cities: Crowdsensing-based monitoring of transportation infrastructure using in-traffic vehicles. J. Civ. Struct. Health Monit. 2020, 10, 653–665. [Google Scholar] [CrossRef]
- Sarwar, M.Z.; Cantero, D. Deep autoencoder architecture for bridge damage assessment using responses from several vehicles. Eng. Struct. 2021, 246, 113064. [Google Scholar] [CrossRef]
- Locke, W.; Sybrandt, J.; Redmond, L.; Safro, I.; Atamturktur, S. Using drive-by health monitoring to detect bridge damage considering environmental and operational effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar] [CrossRef]
- Kildashti, K.; Alamdari, M.M.; Kim, C.; Gao, W.; Samali, B. Drive-by-bridge inspection for damage identification in a cable-stayed bridge: Numerical investigations. Eng. Struct. 2020, 223, 110891. [Google Scholar] [CrossRef]
- Zhang, B.; Qian, Y.; Wu, Y.; Yang, Y. An effective means for damage detection of bridges using the contact-point response of a moving test vehicle. J. Sound Vib. 2018, 419, 158–172. [Google Scholar] [CrossRef]
- Erduran, E.; Gonen, S. Contact point accelerations, instantaneous curvature, and physics-based damage detection and location using vehicle-mounted sensors. Eng. Struct. 2024, 304, 117608. [Google Scholar] [CrossRef]
- Hester, D.; González, A. A wavelet-based damage detection algorithm based on bridge acceleration response to a vehicle. Mech. Syst. Signal Process. 2012, 28, 145–166. [Google Scholar] [CrossRef]
- Hester, D.; González, A. A discussion on the merits and limitations of using drive-by monitoring to detect localised damage in a bridge. Mech. Syst. Signal Process. 2017, 90, 234–253. [Google Scholar] [CrossRef]
- Zhang, T.; Zhu, J.; Xiong, Z.; Zheng, K.; Wu, M. A new drive-by method for bridge damage inspection based on characteristic wavelet coefficient. Buildings 2023, 13, 397. [Google Scholar] [CrossRef]
- Salehi, M.; Erduran, E. Identification of boundary conditions of railway bridges using artificial neural networks. J. Civ. Struct. Health Monit. 2022, 12, 1223–1246. [Google Scholar] [CrossRef]
- Demirlioglu, K.; Gonen, S.; Erduran, E. Effect of Road Roughness on the Dynamic Response of Vehicles in Vehicle-Bridge Interaction Modeling. In International Conference on Experimental Vibration Analysis for Civil Engineering Structures; Springer Nature: Cham, Switzerland, 2023. [Google Scholar]
- Dodds, C.; Robson, J. The description of road surface roughness. J. Sound Vib. 1973, 31, 175–183. [Google Scholar] [CrossRef]
- ISO 8608; Road Surface Profiles–Reporting of Measured Data. International Standards Organisation: Geneva, Switzerland, 2016.
- Mallat, S. A Wavelet Tour of Signal Processing; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Yang, Y.; Li, Y.; Chang, K. Effect of road surface roughness on the response of a moving vehicle for identification of bridge frequencies. Interact. Multiscale Mech. 2012, 5, 347–368. [Google Scholar] [CrossRef]
- González, A.; O’brien, E.J.; Li, Y.Y.; Cashell, K. The use of vehicle acceleration measurements to estimate road roughness. Veh. Syst. Dyn. 2008, 46, 483–499. [Google Scholar] [CrossRef]
- Harris, N.K.; González, A.; OBrien, E.J.; McGetrick, P. Characterisation of pavement profile heights using accelerometer readings and a combinatorial optimisation technique. J. Sound Vib. 2010, 329, 497–508. [Google Scholar] [CrossRef]
- Zhan, Y.; Au, F. Bridge surface roughness identification based on vehicle–bridge interaction. Int. J. Struct. Stab. Dyn. 2019, 19, 1950069. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.; Kong, B. Numerically extracting bridge modal properties from dynamic responses of moving vehicles. J. Eng. Mech. 2016, 142, 04016025. [Google Scholar] [CrossRef]
- Erduran, E.; Nordli, C.; Gonen, S. Effect of Elastomeric Bearing Stiffness on the Dynamic Response of Railway Bridges Considering Vehicle–Bridge Interaction. Appl. Sci. 2022, 12, 1952. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, H.; Wang, Z.L.; Shi, K. Using vehicle–bridge contact spectra and residue to scan bridge’s modal properties with vehicle frequencies and road roughness eliminated. Struct. Control Health Monit. 2022, 29, e2968. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bridge | Mass per length | ρ = 2 t/m |
| Young’s modulus | GPa | |
| Moment of inertia | I = 0.20 m4 | |
| First mode frequency | = 4.35 Hz | |
| Second mode frequency | = 17.23 Hz | |
| Third mode frequency | = 38.06 Hz | |
| Vehicle | Mass | = 5 t |
| Mass moment of Inertia | = 3.5 t·m2 | |
| Stiffness coefficient (front) | = 5750 kN/m | |
| Stiffness coefficient (rear) | = 2875 kN/m | |
| Damping coefficient (front) | = 2.5 kN·s/m | |
| Damping coefficient (rear) | = 2.5 kN·s/m | |
| Axle distance to the mass | = = 1 m | |
| Bounce frequency | = 5.77 Hz | |
| Pitching frequency | = 8.53 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demirlioglu, K.; Erduran, E. Drive-by Bridge Damage Detection Using Continuous Wavelet Transform. Appl. Sci. 2024, 14, 2969. https://doi.org/10.3390/app14072969
Demirlioglu K, Erduran E. Drive-by Bridge Damage Detection Using Continuous Wavelet Transform. Applied Sciences. 2024; 14(7):2969. https://doi.org/10.3390/app14072969
Chicago/Turabian StyleDemirlioglu, Kultigin, and Emrah Erduran. 2024. "Drive-by Bridge Damage Detection Using Continuous Wavelet Transform" Applied Sciences 14, no. 7: 2969. https://doi.org/10.3390/app14072969