
Unmanned Helicopter Airborne Fourier Transform Infrared Spectrometer Remote Sensing System for Hazardous Vapors Detection
Abstract
:1. Introduction
- We proposed to use an unmanned helicopter as the FTIR carrying platform. The payload and endurance advantages of unmanned helicopters reduce the weight and power consumption requirements of the spectrometer. To the best of our knowledge, this is the first attempt to integrate the FTIR with unmanned helicopters.
- Aiming at the problem of removing the background and extracting the spectral characteristics of the gas of the spectrometer mounted on the unmanned helicopter, we proposed to collect multiple background spectra near the detection area to form a background spectral database, and use the algorithm based on robust principal component analysis to separate the low-rank background.
2. Materials and Methods
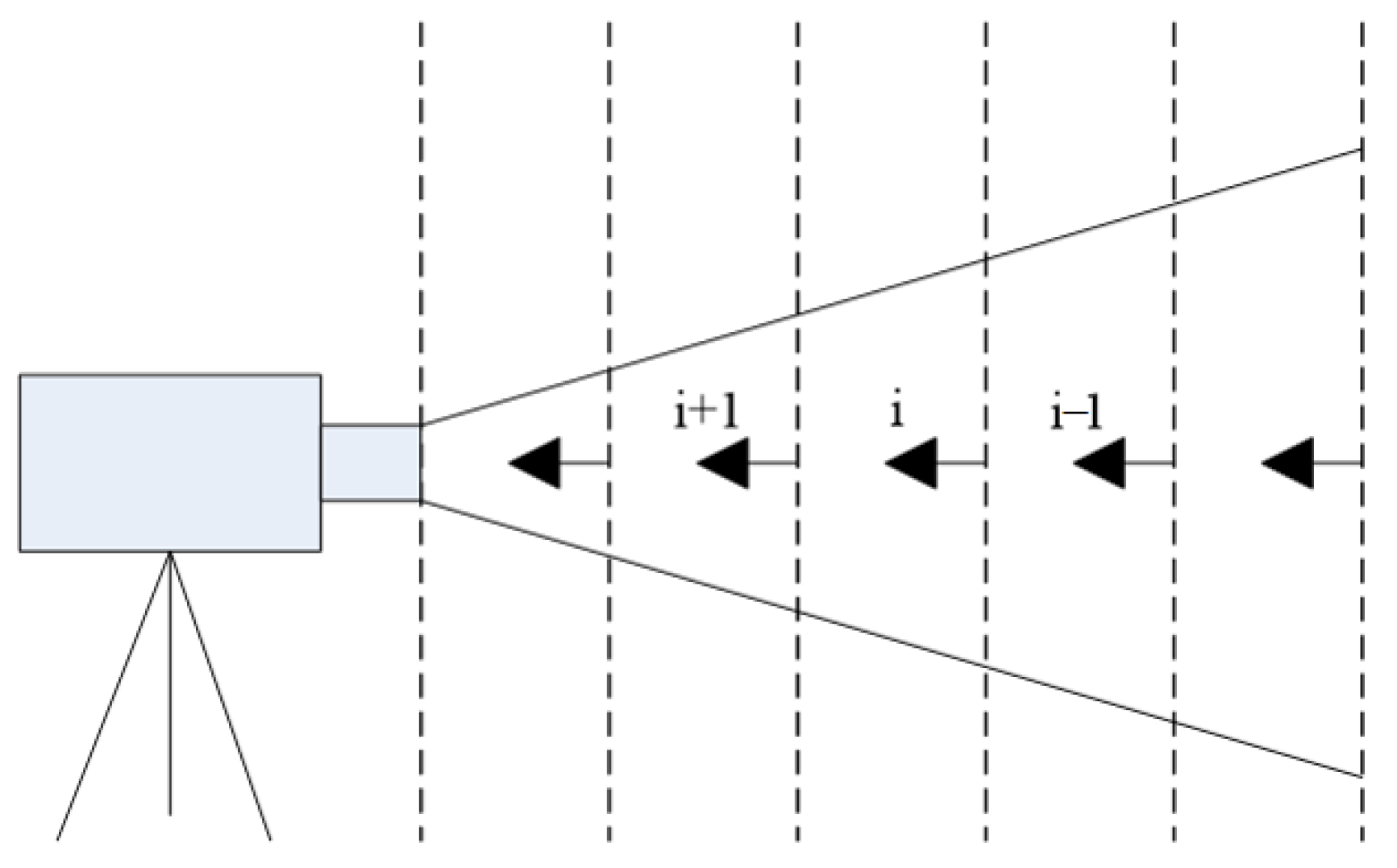
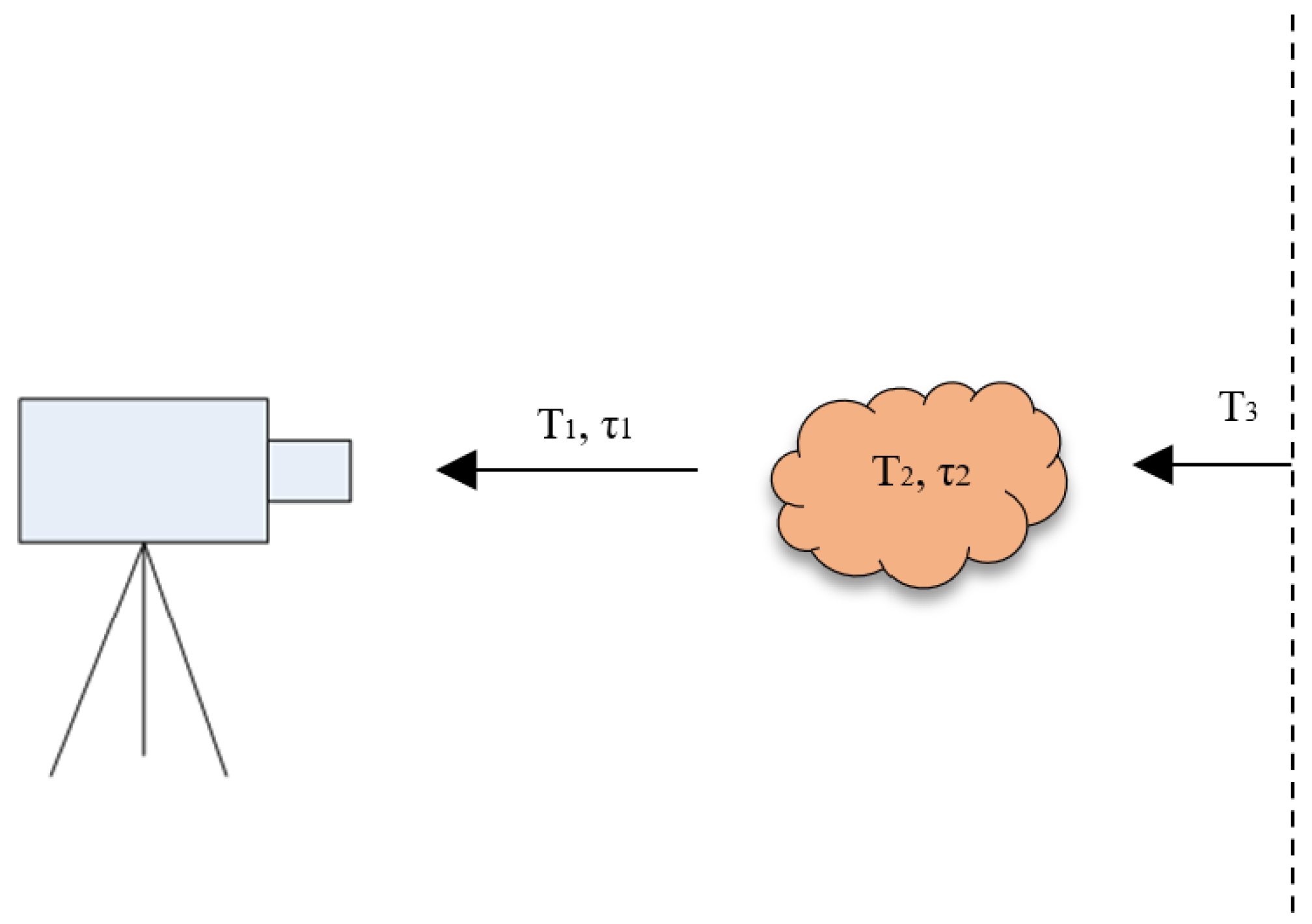
2.1. FTIR Passive Remote Sensing Model
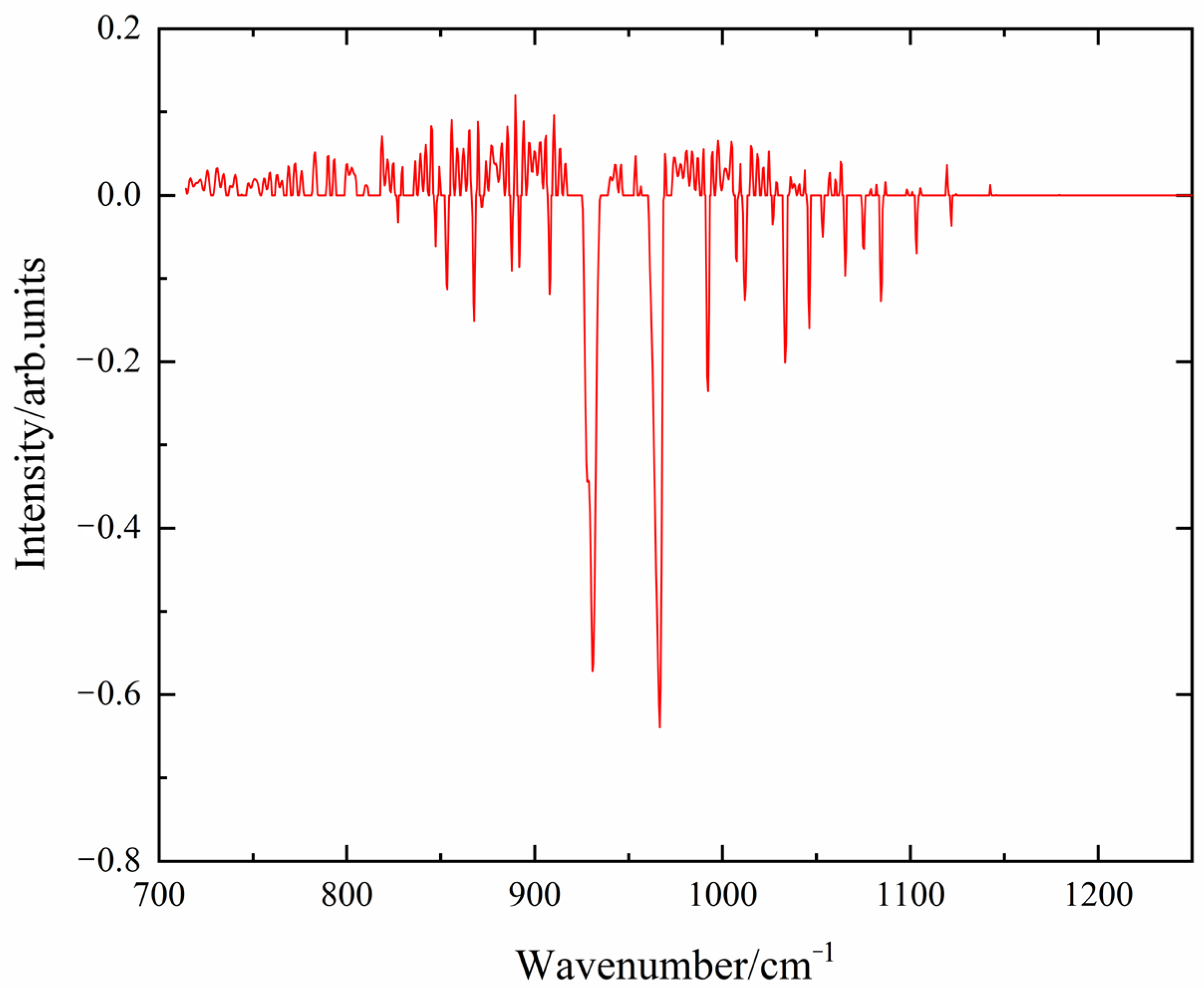
2.2. Gas Absorption Feature Extraction Based on RPCA
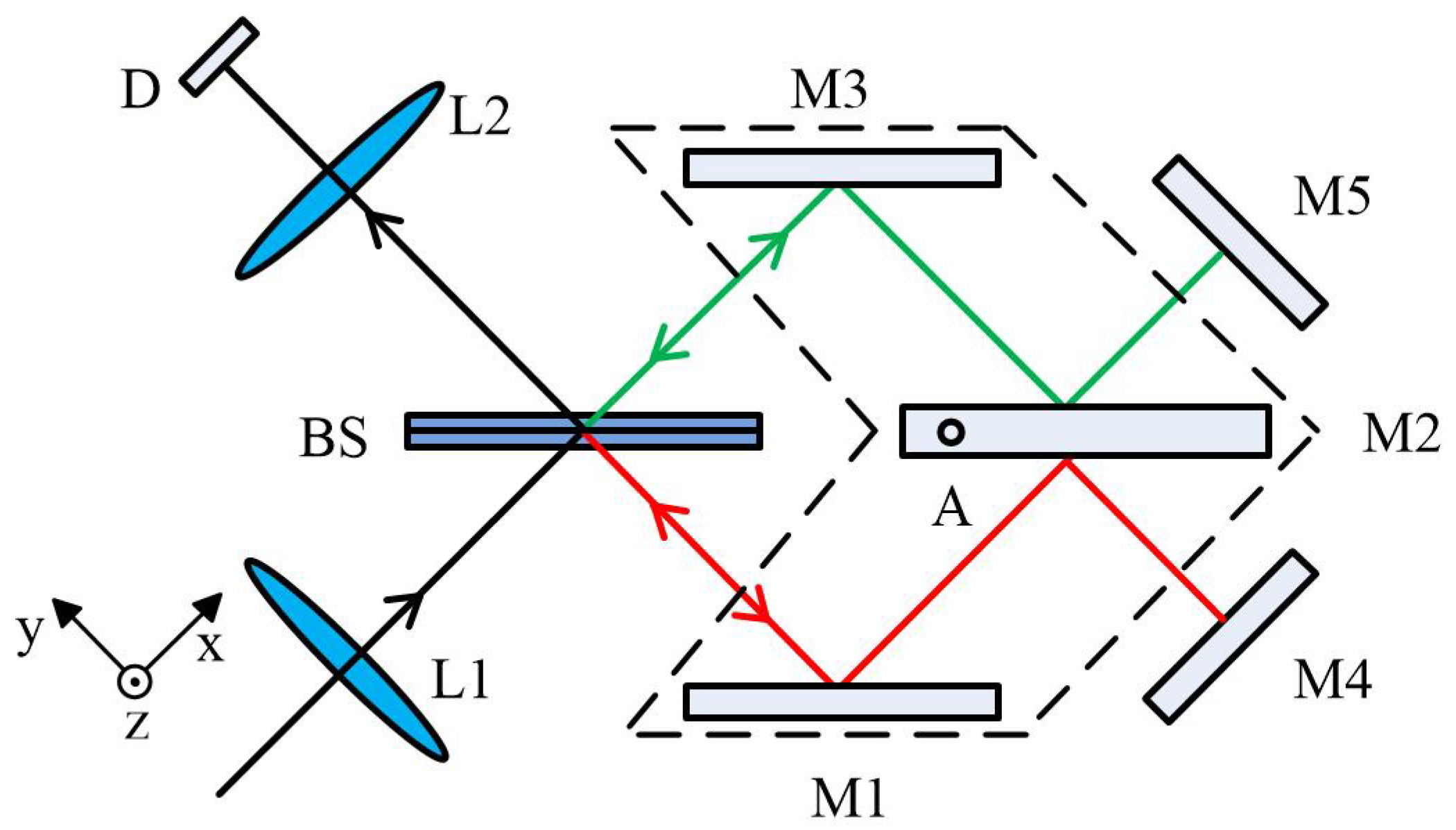
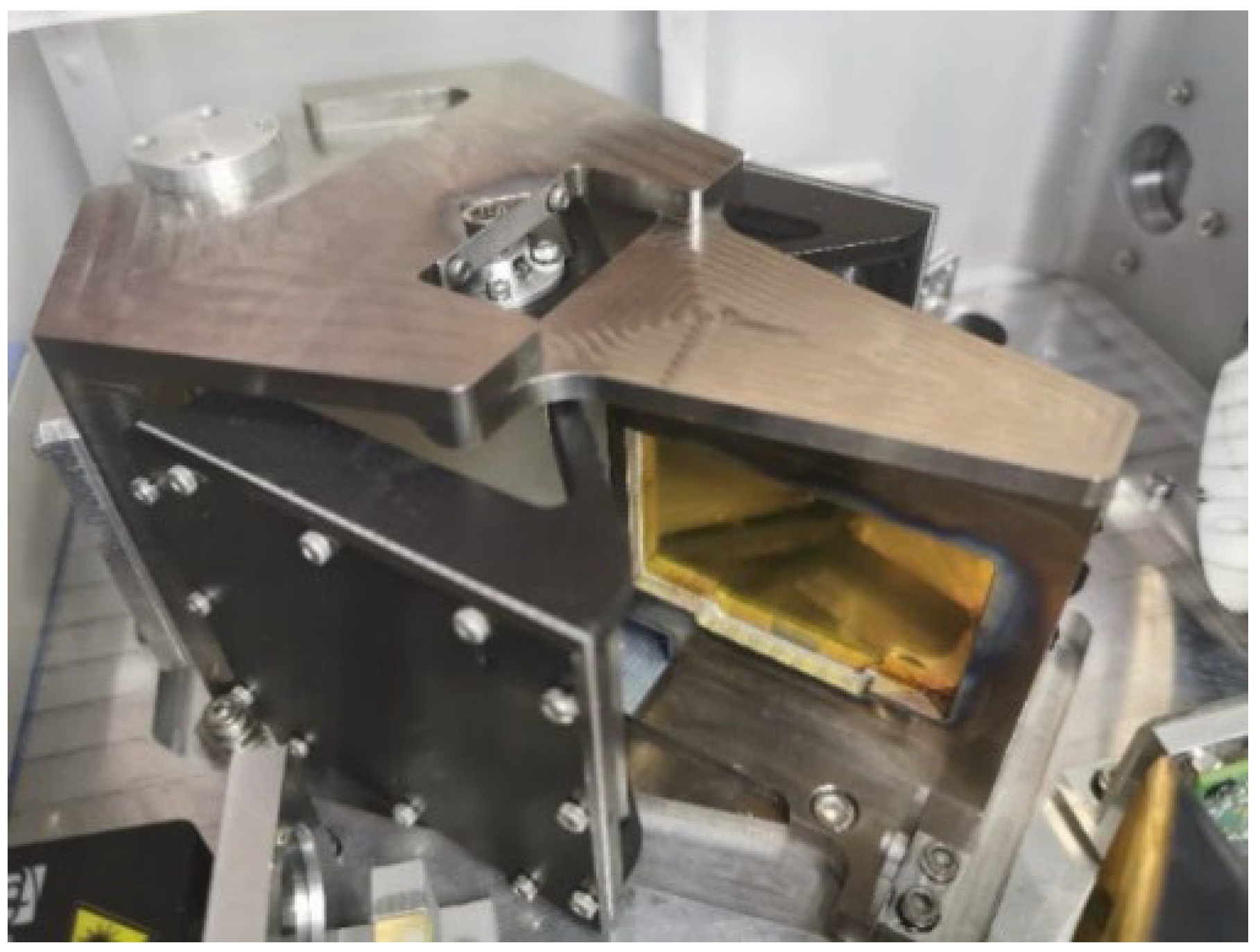
2.3. Dual-Channel Parallel Oscillating Mirror Interferometer
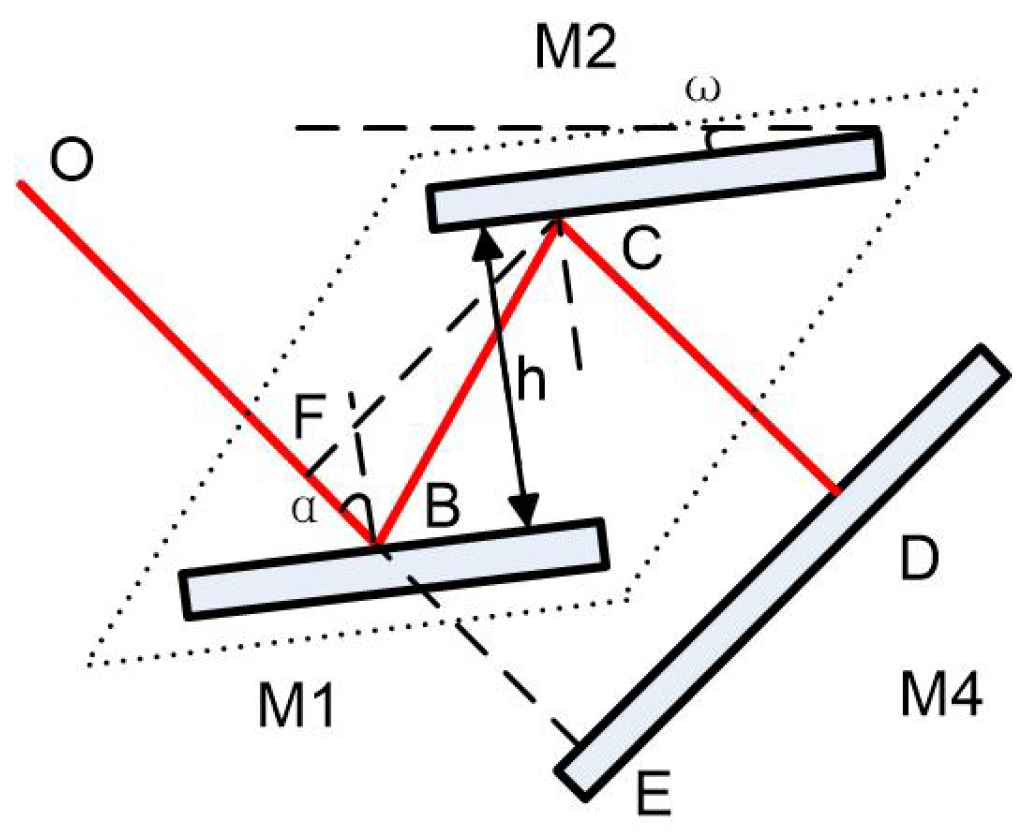
2.3.1. Basic Principle and Components
2.3.2. Physical Design
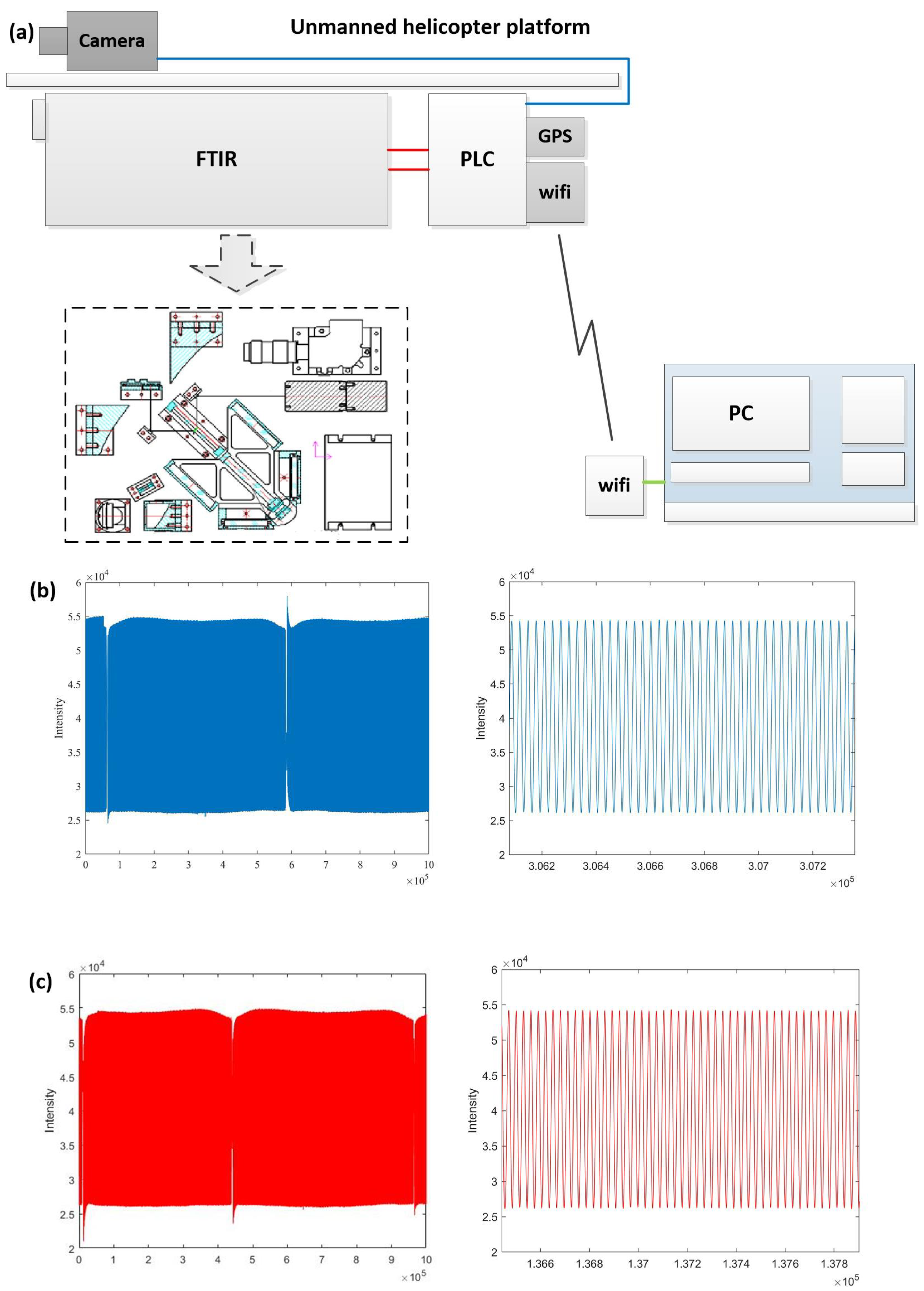
2.4. Unmanned Helicopter Airborne FTIR Remote Sensing System
3. Results
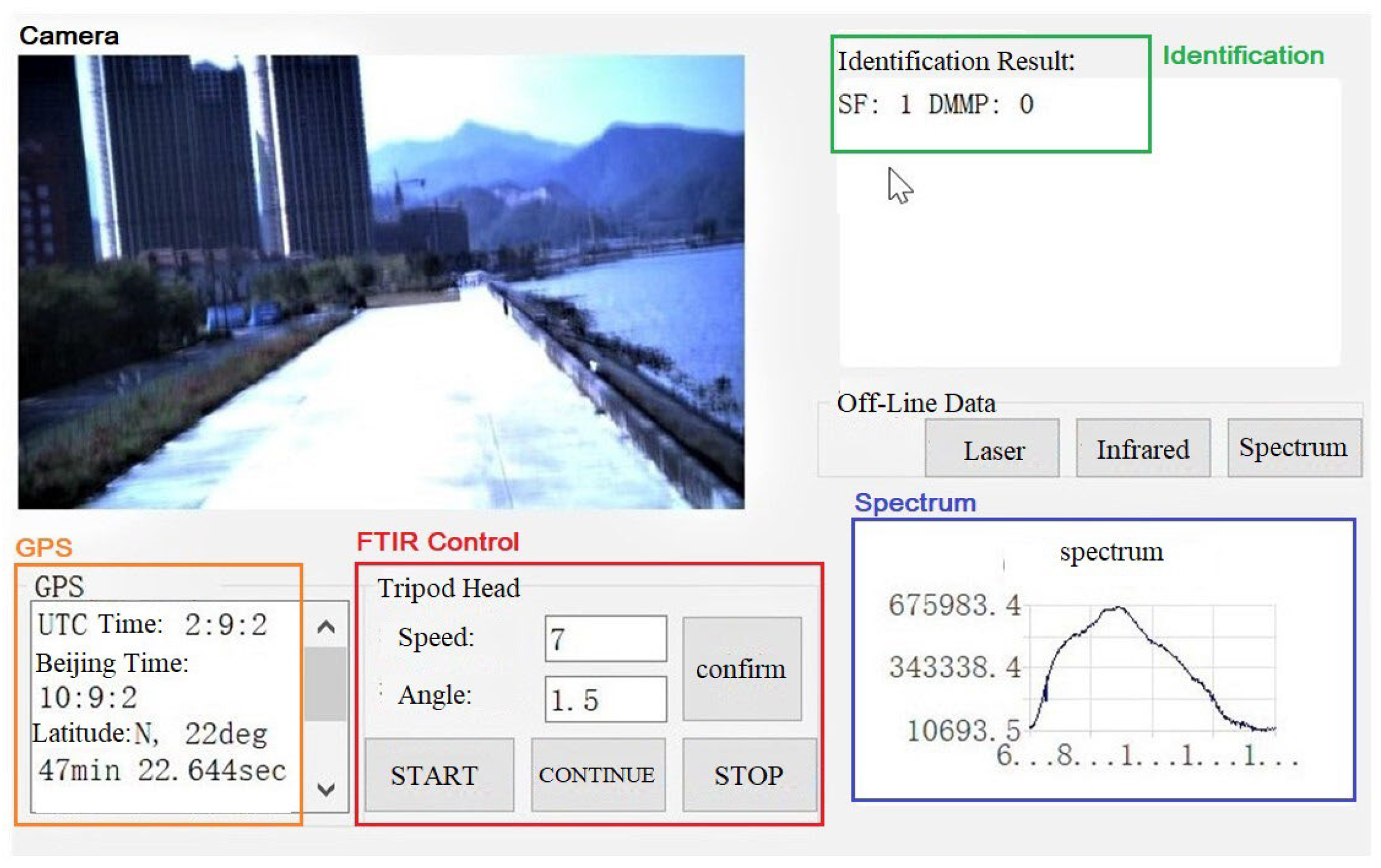
3.1. Ground Detection Experiment
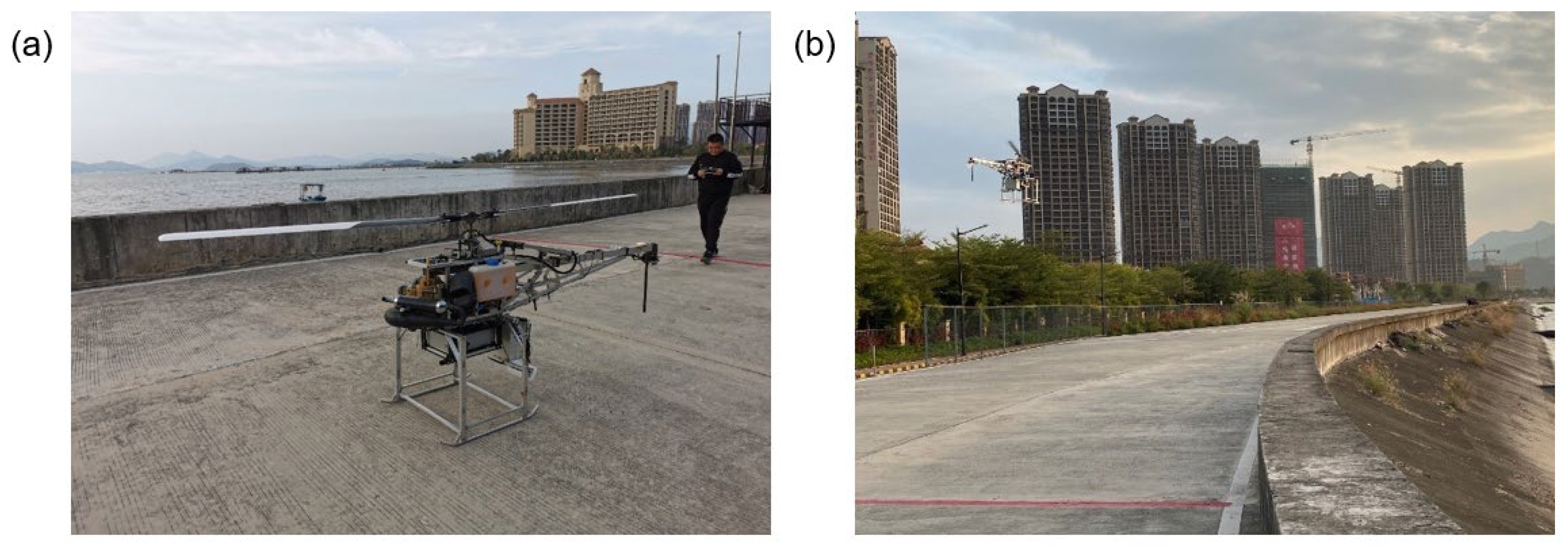
3.2. Flight Detection Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Beil, A.; Daum, R.; Harig, R.; Matz, G. Remote sensing of atmospheric pollution by passive FTIR spectrometry. In Proceedings of the Spectroscopic Atmospheric Environmental Monitoring Techniques, Barcelona, Spain, 15 December 1998; SPIE: Bellingham, WA, USA, 1998; pp. 32–43. [Google Scholar]
- Flanigan, D.F. Prediction of the limits of detection of hazardous vapors by passive infrared with the use of MODTRAN. Appl. Opt. 1996, 35, 6090–6098. [Google Scholar] [CrossRef] [PubMed]
- Harig, R.; Matz, G. Toxic cloud imaging by infrared spectrometry: A scanning FTIR system for identification and visualization. Field Anal. Chem. Technol. 2001, 5, 75–90. [Google Scholar] [CrossRef]
- Lee, J.H.; Yu, H.G.; Park, D.J.; Park, B.H.; Kim, J.H. Characterization of hazardous gases using an infrared hyperspectral imaging system. Instrum. Sci. Technol. 2015, 43, 469–484. [Google Scholar] [CrossRef]
- Kim, Y.C.; Yu, H.G.; Lee, J.H.; Park, D.J.; Nam, H.W. Hazardous gas detection for FTIR-based hyperspectral imaging system using DNN and CNN. In Proceedings of the Electro-Optical and Infrared Systems: Technology and Applications XIV, Warsaw, Poland, 13–14 September 2017; SPIE: Bellingham, WA, USA; pp. 341–349. [Google Scholar]
- Yu, H.G.; Lee, J.H.; Kim, Y.C.; Park, D.J. Intelligent detection algorithm of hazardous gases for FTIR-based hyperspectral imaging system using SVM classifier. In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XXIII, Anaheim, CA, USA, 11–13 April 2017; SPIE: Bellingham, WA, USA; pp. 75–83. [Google Scholar]
- Li, D.; Cui, F.; Wang, A.; Li, Y.; Wu, J.; Qiao, Y. Adaptive Detection Algorithm for Hazardous Clouds Based on Infrared Remote Sensing Spectroscopy and the LASSO Method. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8649–8664. [Google Scholar] [CrossRef]
- Schafer, K.; Jahn, C.; Utzig, S.; Flores-Jardines, E.; Harig, R.; Rusch, P. Remote measurement of the plume shape of aircraft exhausts at airports by passive FTIR spectrometry. In Proceedings of the Remote Sensing of Clouds and the Atmosphere IX, Maspalomas, Spain, 13–15 September 2004; SPIE: Bellingham, WA, USA, 2004; pp. 334–344. [Google Scholar]
- Flores-Jardines, E.; Schäfer, K.; Harig, R.; Rusch, P.; Grutter, M. Investigation of temperature and gas concentration distributions in hot exhausts (airplanes and burners) by scanning imaging FTIR spectrometry. In Proceedings of the Remote Sensing of Clouds and the Atmosphere, X, Bruges, Belgium, 29 October 2005; SPIE: Bellingham, WA, USA; pp. 365–376. [Google Scholar]
- Paulec, M.; Marciniak, M.; Gross, K.; Akers, B.; Azevedo, D. Tomographic reconstruction of a jet engine exhaust plume using an infrared hyperspectral imager. Opt. Eng. 2018, 57, 103103. [Google Scholar] [CrossRef]
- Harig, R. Passive remote sensing of pollutant clouds by Fourier-transform infrared spectrometry: Signal-to-noise ratio as a function of spectral resolution. Appl. Opt. 2004, 43, 4603–4610. [Google Scholar] [CrossRef] [PubMed]
- Harig, R.; Matz, G.; Rusch, P. Scanning infrared remote sensing system for identification, visualization, and quantification of airborne pollutants. In Proceedings of the Instrumentation for Air Pollution and Global Atmospheric Monitoring, Boston, MA, USA, 7 February 2001; SPIE: Bellingham, WA, USA, 2001; pp. 83–94. [Google Scholar]
- Thériault, J.M.; Puckrin, E.; Bouffard, F.; Déry, B. Passive remote monitoring of chemical vapors by differential Fourier-transform infrared radiometry: Results at a range of 1.5 km. Appl. Opt. 2004, 43, 1425–1434. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Xu, L.; Shen, X.; Jin, L.; Xu, H.; Deng, Y.; Liu, J.; Liu, W. Reconstruction of a leaking gas cloud from a passive FTIR scanning remote-sensing imaging system. Appl. Opt. 2021, 60, 9396–9403. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Xu, L.; Shen, X.; Jin, L.; Xu, H.; Deng, Y.; Liu, J.; Liu, W. Three-dimensional reconstruction of a leaking gas cloud based on two scanning FTIR remote-sensing imaging systems. Opt. Express 2022, 30, 25581–25596. [Google Scholar] [CrossRef] [PubMed]
- Hammer, S.; Griffith DW, T.; Konrad, G.; Vardag, S.; Caldow, C.; Levin, I. Assessment of a multi-species in situ FTIR for precise atmospheric greenhouse gas observations. Atmos. Meas. Tech. 2013, 6, 1153–1170. [Google Scholar] [CrossRef]
- Griffith, D.W.; Pöhler, D.; Schmitt, S.; Hammer, S.; Vardag, S.N.; Platt, U. Long open-path measurements of greenhouse gases in air using near-infrared Fourier transform spectroscopy. Atmos. Meas. Tech. 2018, 11, 1549–1563. [Google Scholar] [CrossRef]
- Byrne, B.; Strong, K.; Colebatch, O.; You, Y.; Wunch, D.; Ars, S.; Jones, D.B.A.; Fogal, P.; Mittermeier, R.L.; Worthy, D.; et al. Monitoring urban greenhouse gases using open-path Fourier transform spectroscopy. Atmos.-Ocean 2020, 58, 25–45. [Google Scholar] [CrossRef]
- Rutkauskas, M.; Asenov, M.; Ramamoorthy, S.; Reid, D.T. Autonomous multi-species environmental gas sensing using drone-based Fourier-transform infrared spectroscopy. Opt. Express 2019, 27, 9578–9587. [Google Scholar] [CrossRef] [PubMed]
- Sharma, R.; Arya, R. UAV based long range environment monitoring system with Industry 5.0 perspectives for smart city infrastructure. Comput. Ind. Eng. 2022, 168, 108066. [Google Scholar] [CrossRef]
- Golston, L.M.; Aubut, N.F.; Frish, M.B.; Yang, S.; Talbot, R.W.; Gretencord, C.; Spiritt, M.J.; Zondlo, M.A. Natural gas fugitive leak detection using an unmanned aerial vehicle: Measurement system description and mass balance approach. Atmosphere 2018, 9, 383. [Google Scholar] [CrossRef]
- Gu, Q.R.; Michanowicz, D.; Jia, C. Developing a modular unmanned aerial vehicle (UAV) platform for air pollution profiling. Sensors 2018, 18, 4363. [Google Scholar] [CrossRef] [PubMed]
- Goody, R.M.; Yung, Y.L. Atmospheric Radiation: Theoretical Basis; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? J. ACM 2011, 58, 1–37. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Spectral resolution/cm−1 | 4 |
| Spectral range/μm | 8–14 |
| Field of view/mrad | 30 |
| Scan rate/(scan/s) | 8 |
| Detector | Stirling MCT |
| Parameter | Specification |
|---|---|
| Product model | HuaYi UH1C100B, (HuaYi Shenzhen, China) |
| Max speed/(km/h) | 800 |
| Payload/kg | 40 |
| Duration of Flight/h | 1.5@30 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Z.; Huang, M.; Qian, L.; Han, W.; Zhang, G.; Lu, X. Unmanned Helicopter Airborne Fourier Transform Infrared Spectrometer Remote Sensing System for Hazardous Vapors Detection. Appl. Sci. 2024, 14, 1367. https://doi.org/10.3390/app14041367
Shi Z, Huang M, Qian L, Han W, Zhang G, Lu X. Unmanned Helicopter Airborne Fourier Transform Infrared Spectrometer Remote Sensing System for Hazardous Vapors Detection. Applied Sciences. 2024; 14(4):1367. https://doi.org/10.3390/app14041367
Chicago/Turabian StyleShi, Zhengyang, Min Huang, Lulu Qian, Wei Han, Guifeng Zhang, and Xiangning Lu. 2024. "Unmanned Helicopter Airborne Fourier Transform Infrared Spectrometer Remote Sensing System for Hazardous Vapors Detection" Applied Sciences 14, no. 4: 1367. https://doi.org/10.3390/app14041367