
Building an Information Modeling-Based System for Automatically Generating the Assembly Sequence of Precast Concrete Components Using a Genetic Algorithm


Abstract
:1. Introduction
1.1. Literature Review
1.1.1. Assembly Phase Considerations in the OSC Environment
1.1.2. Methodology for On-Site Construction Planning Automation and Optimization
1.1.3. Genetic Algorithm-Based Automated Assembly Planning
1.2. Limitations of Previous Studies
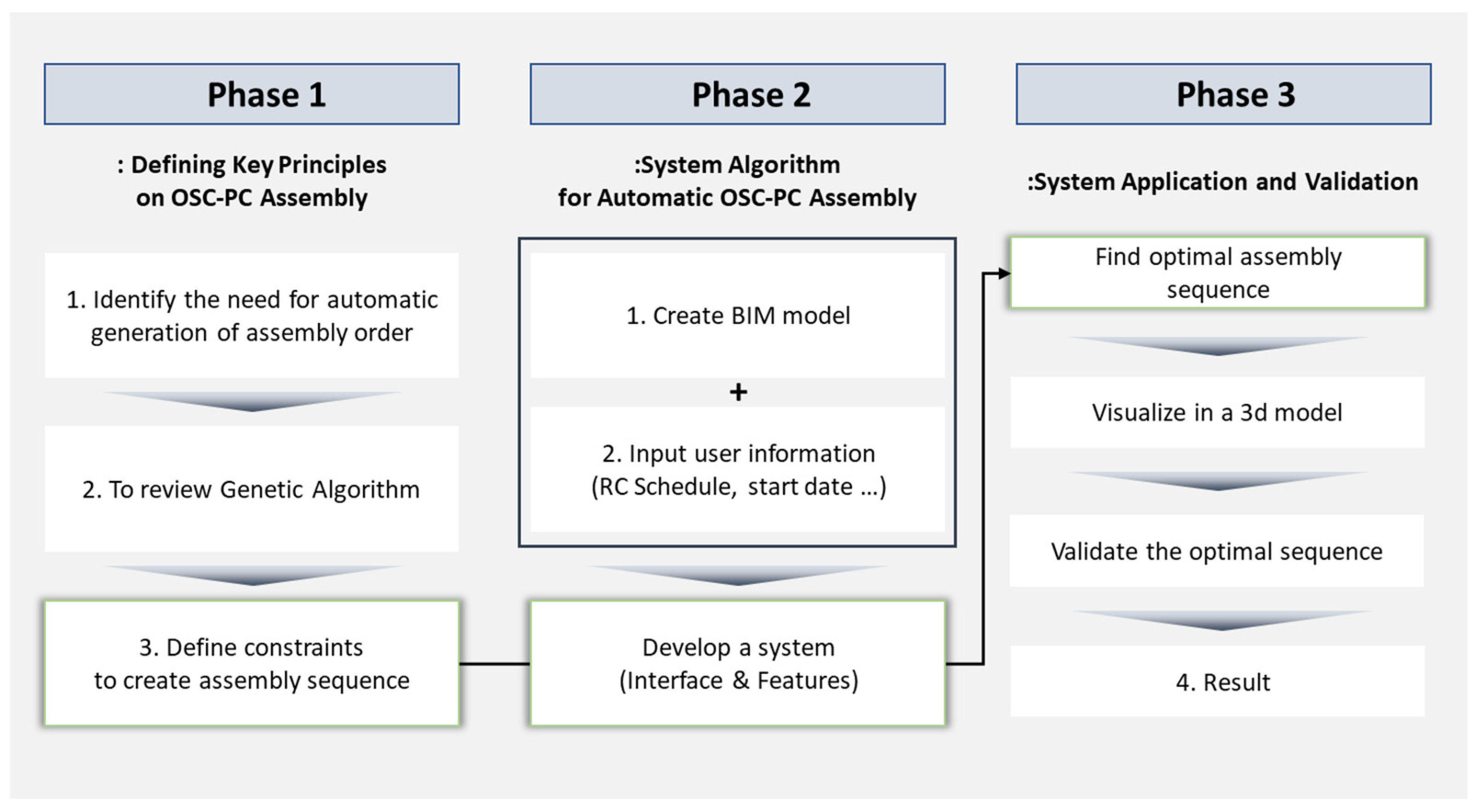
2. Materials and Methods
- Establishment of Principles for Assembly Sequence Generation: This initial phase focuses on developing a comprehensive system framework integrating BIM and GA. The objective of this study is to understand the influence of various complex constraints and principles on the assembly sequence generation process.
- Development of an on-site assembly sequence automation interface: The second phase involves the development of a system interface tailored for practical on-site applications. This includes the creation of software applications, definition of system functionalities, and integration of relevant aspects to facilitate real-time utilization.
- Validation and Adaptability Assessment in On-site Applications: In the final phase, the research outcomes were applied in real on-site scenarios to validate the efficacy and versatility of the automated assembly sequence system. This involves the exploration of diverse assembly sequences and simulations to determine the adaptability of the system to evolving on-site conditions.
3. Results
3.1. Phase I: Defining PC On-site Assembly Optimization Principles via BIM-GA Hybrid System
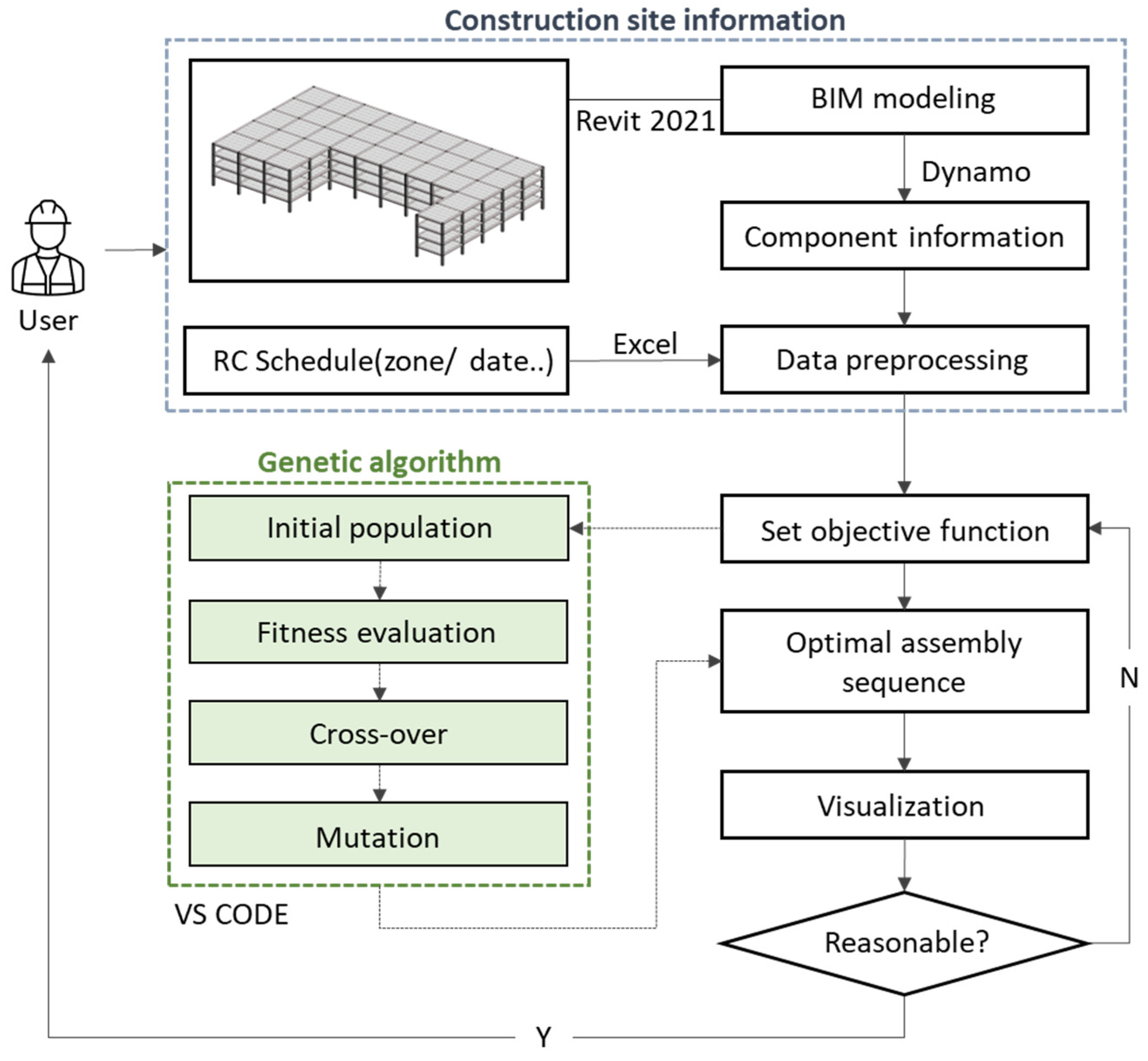
3.1.1. System Framework
3.1.2. Constraints of Optimizing Assembly Sequence
- Time-Efficient Sequencing: Sequential installation of similar components, typically in the order of columns, beams, and slabs within specific zones, optimizing workflow dependencies.
- Minimized delays and movement: Adjacent components within the work area are prioritized to save waiting times and unnecessary equipment and labor movements, ensuring efficient installation. The validation of component adjacency within a feasible radius is pivotal.
- External Factors and Coordination: Weather fluctuations and other external elements can disrupt project schedules. Daily coordination in precast concrete assemblies, particularly during crane activity, is critical. Factors such as component damage, delivery delays, and on-site hindrances must be considered.
3.1.3. Complexity of Works
- A = sum of penalty score of complexity
- = complexity penalty score between ith and i + 1th components of the assembly sequence
- n = the number of components
3.1.4. Adjacency of Works
- B = sum of penalty score of adjacency
- = adjacency penalty score between ith and i + 1th component in the assembly sequence
- =distance between ith and i + 1th component in the assembly sequence
- n = the number of components
3.1.5. Interference of Works
- C = sum of penalty score of interference
- = interference penalty score per component in the assembly sequence
- n = the number of components
- P = composite penalty score of all PC components
- = weight of complexity (constraint 1)
- = weight of adjacency (constraint 2)
- = weight of interference (constraint 3)
- n = The number of components
- P = composite penalty score of all PC components
3.2. Phase II: Development of an Automatic Assembly Sequence Generation System Based on the PC Construction Site
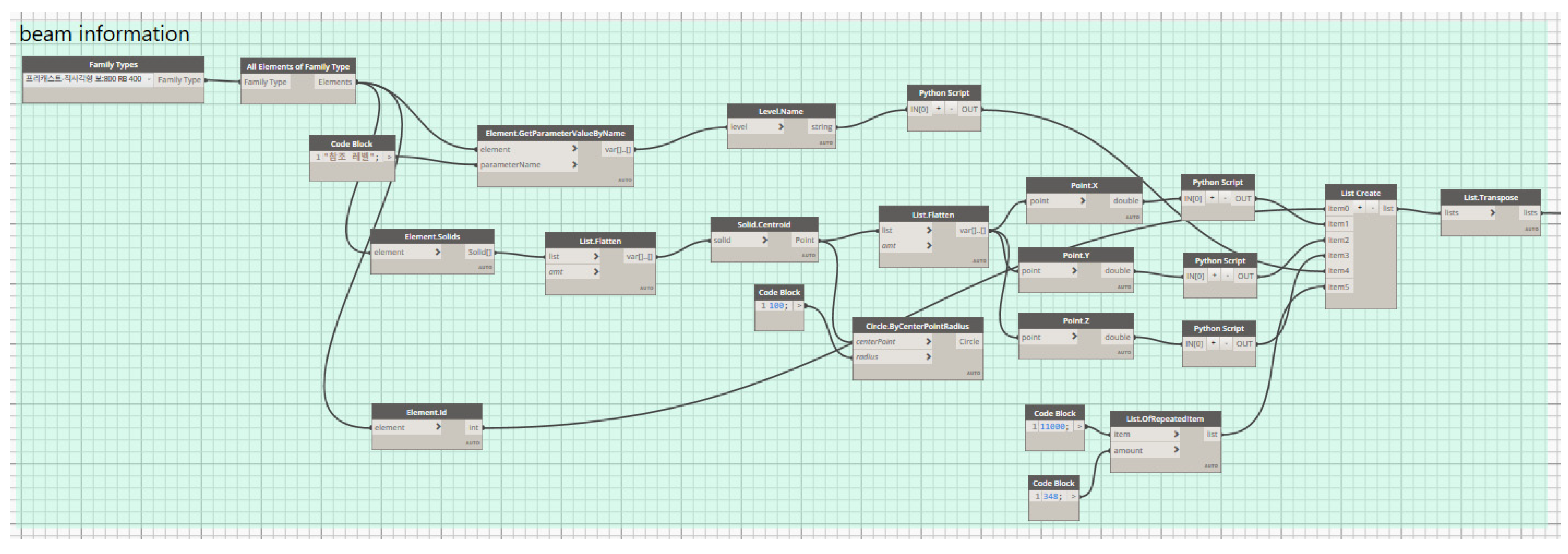
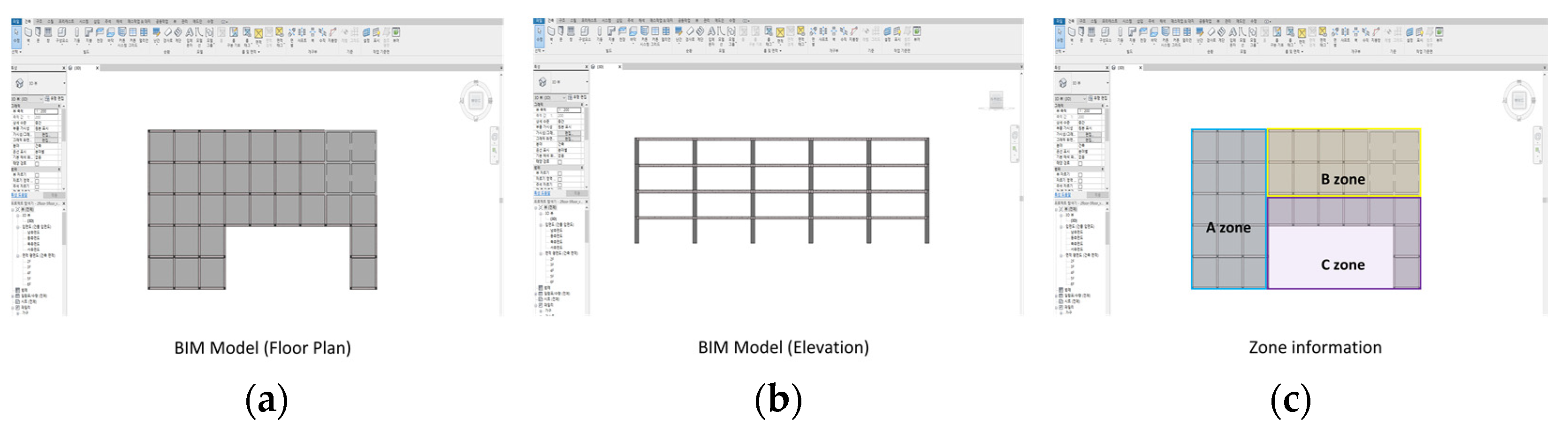
3.2.1. PC Site Modeling and Component Information Extraction
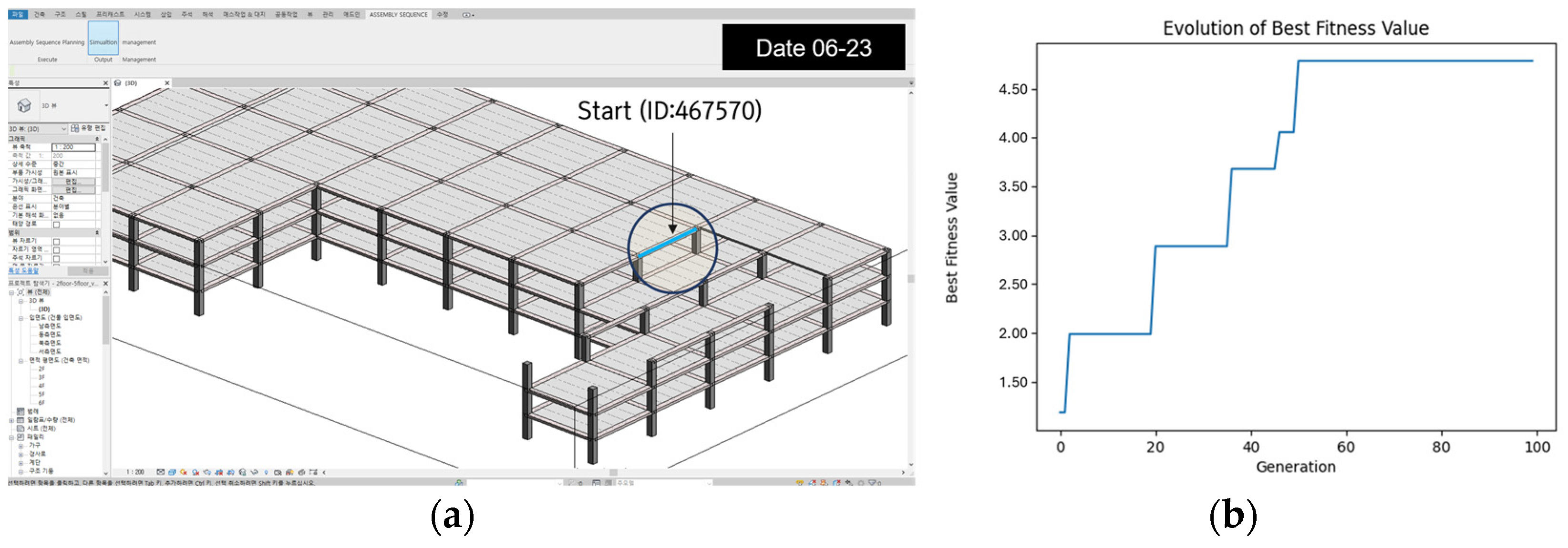
3.2.2. Application of Genetic Algorithm
| Algorithm 1 Type penalty |
| # complexity penalty |
| for i in range(start_index,n): |
| prev_component = result_uninstalled.iloc[individual[i−1]] |
| current_component = result_uninstalled.iloc[individual[i]] |
| prev_type = prev_component['installation time'] |
| current_type = current_component['installation time'] |
| if prev_type == current_type: |
| penalty1 = 0 |
| else: |
| if prev_type == 'column': |
| penalty1 = 1 |
| elif prev_type == 'beam': |
| penalty1 = 2 |
| elif prev_type == 'slab': |
| penalty1 = 3 |
| penalty_matrix.append(penalties1) |
| Algorithm 2 Distance penalty |
| #adjacency penalty |
| for i in range(start_index,n): |
| prev_component = result_uninstalled.iloc[individual[i−1]] |
| current_component = result_uninstalled.iloc[individual[i]] |
| diff = np.sqrt((current_component['x coordinate'] - prev_component['x coordinate'])**2 + |
| (current_component['y coordinate'] - prev_component['y coordinate'])**2 + |
| (current_component['z coordinate'] - prev_component['z coordinate'])**2) |
| if i > start_index and diff > prev_diff: |
| penalty2 = diff/prev_diff |
| penalties2.append(penalty2) |
| else: |
| penalty2 = 0 |
| penalties2.append(penalty2) |
| prev_diff = diff |
| penalties2.append(penalty2) |
| penalty_matrix.append(penalties2) |
| Algorithm 3 Interference penalty |
| #interference penalty |
| for i in range(start_index,n): |
| prev_component = result_uninstalled.iloc[individual[i−1]] |
| current_component = result_uninstalled.iloc[individual[i]] |
| for rc_index in range(len(rc_activities)): |
| if (current_member_x == rc_x[rc_index] and |
| current_member_y == rc_y[rc_index]) and |
| current_member_z == rc_z[rc_index])and |
| current_date == rc_date[rc_index]): |
| interference_count += 1 |
| penalty3 = interference_count |
| print(interference_count) |
| penalties3.append(penalty3) |
| penalty_matrix.append(penalties3) |
| Algorithm 4 Assigning Data Date |
| start_date = pd.Timestamp(“23 June 2023) |
| installation_date = start_date + pd.Timedelta(days=installation_date_count // 15) |
| if installation_date_count % 15 == 0 and installation_date_count != 0: |
| installation_date += pd.Timedelta(days=1) |
| current_date = installation_date.date() |
| installation_dates[member_index] = current_date |
| installation_date_count += 1 |
| Algorithm 5 Evaluation |
| def evaluate_fitness(individual): |
| penalty = calculate_total_penalty(individual) |
| fitness = 1/(penalty) |
| return fitness, |
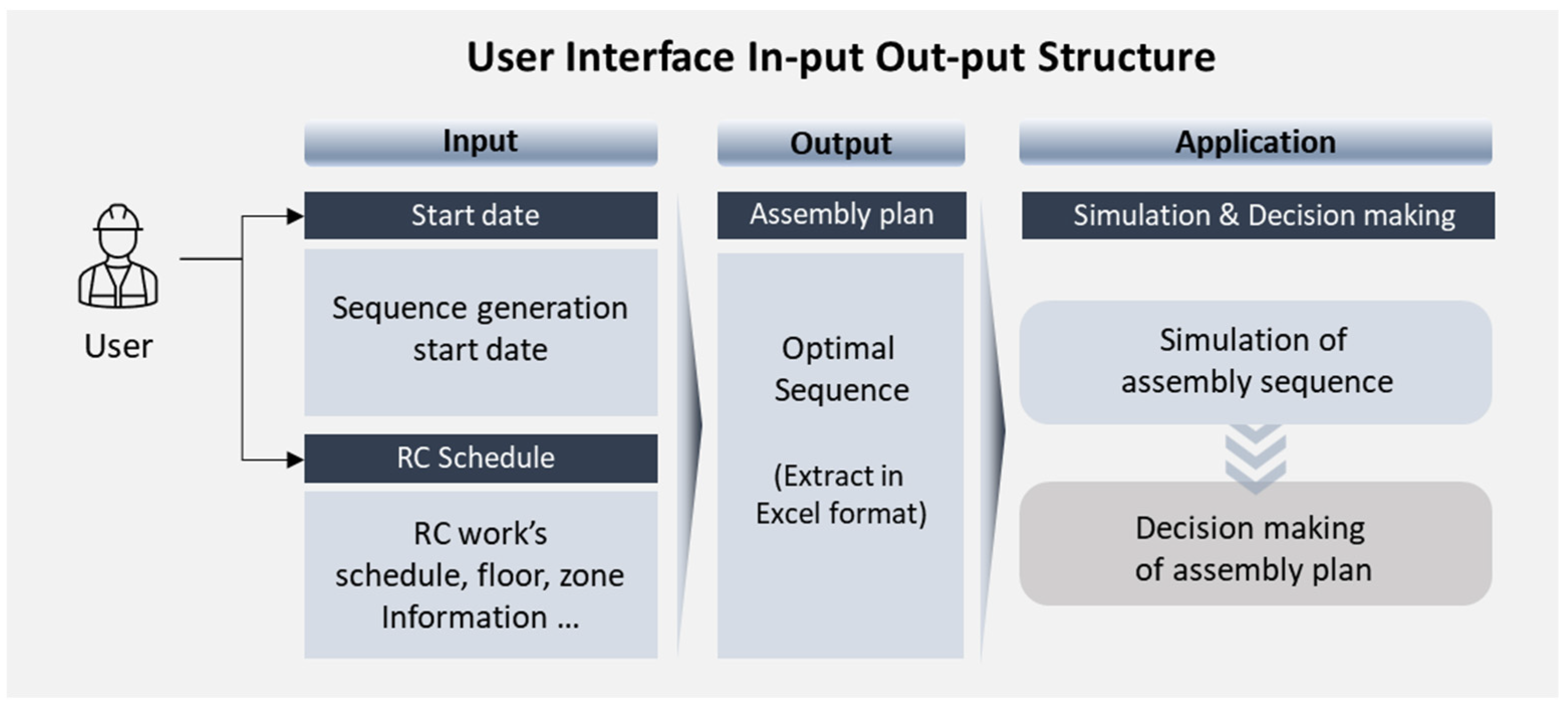
3.2.3. Development of Graphic User Interface (GUI)
3.3. Phase III: Application and Validation of the Automatic Assembly Sequence Generation System Based on the PC Construction Site
- Commencing on 23 June, the first strategy involved prioritizing the installation of components in areas expected to face interference, aiming to prevent clashes. However, while emphasizing installation in interference-prone zones without violating the component installation feasibility (Constraint 3), additional penalties for adjacency were incurred.
- Another strategy commenced by placing the column components in the upper-left corner and postponing the areas susceptible to interference. This sequence aligned with the component installation feasibility but resulted in higher penalties (Constraint 3), primarily because the initial component placement did not meet specific conditions.
- The third strategy begins with the installation of the upper-left column component, followed by the immediate installation of interference-related components post-overlapping dates. Although this approach prioritizes component feasibility (constraint 3), it incurs penalties for task complexity and adjacency.
- The fourth approach outlined an assembly plan that deviated from the feasibility of component installation (Constraint 3). In real-world scenarios, construction cannot proceed without timely delivery of PC components. Moreover, in instances where interference with other construction activities occurs, prioritizing PC installations is imperative. Consequently, this assembly plan was excluded because of its impracticality in meeting essential construction requirements.
4. Validation and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Goodier, C.; Gibb, A. Future opportunities for offsite in the UK. Constr. Manag. Econ. 2007, 25, 585–595. [Google Scholar] [CrossRef]
- Hwang, B.-G.; Shan, M.; Looi, K.-Y. Knowledge-based decision support system for prefabricated prefinished volumetric construction. Autom. Constr. 2018, 94, 168–178. [Google Scholar] [CrossRef]
- Hwang, B.-G.; Shan, M.; Looi, K.-Y. Key constraints and mitigation strategies for prefabricated prefinished volumetric construction. J. Clean. Prod. 2018, 183, 183–193. [Google Scholar] [CrossRef]
- Liu, D.; Li, X.; Chen, J.; Jin, R. Real-time optimization of precast concrete component transportation and storage. Adv. Civ. Eng. 2020, 2020, 5714910. [Google Scholar] [CrossRef]
- Weber-Lewerenz, B.C. Accents of Added Value in Construction 4.0; Springer Fachmedien: Wiesbaden, Germany, 2022. [Google Scholar] [CrossRef]
- Weber-Lewerenz, B.C.; Traverso, M. Innovation Empowerment in Construction 4.0 by the Corporate Digital Responsibility (CDR)—Approach. A New Field of Scientific Research for the Digital Breakthrough. J. Archit. Environ. Struct. Eng. Res. 2023, 6, 41–64. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, Z.; Sun, C. Research on assembly sequence planning and optimization of precast concrete buildings. J. Civ. Eng. Manag. 2018, 24, 106–115. [Google Scholar] [CrossRef]
- Arashpour, M.; Wakefield, R.; Lee, E.; Chan, R.; Hosseini, M.R. Analysis of interacting uncertainties in on-site and off-site activities: Implications for hybrid construction. Int. J. Proj. Manag. 2016, 34, 1393–1402. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, F.; Zhang, H.; Shi, Z.; Zhu, H. Optimization of assembly sequence of building components based on simulated annealing genetic algorithm. Alex. Eng. J. 2023, 62, 257–268. [Google Scholar] [CrossRef]
- Huang, Y.; Shi, Q.; Zuo, J.; Pena-Mora, F.; Chen, J. Research status and challenges of data-driven construction project management in the big data context. Adv. Civ. Eng. 2021, 2021, 6674980. [Google Scholar] [CrossRef]
- Agostinelli, S.; Cumo, F.; Marzo, R.; Muzi, F. Digital Construction Strategy for Project Management Optimization in a Building Renovation Site: Machine Learning and Big Data Analysis; Lecture Notes in Civil Engineering; Springer International Publishing: Cham, Switzerland, 2022. [Google Scholar] [CrossRef]
- Piras, G.; Agostinelli, S.; Muzi, F. Digital Twin Framework for Built Environment: A Review of Key Enablers. Energies 2024, 17, 436. [Google Scholar] [CrossRef]
- Wuni, I.Y.; Shen, G.Q.; Saka, A.B. Computing the severities of critical onsite assembly risk factors for modular integrated construction projects. Eng. Constr. Archit. Manag. 2022, 30, 1864–1882. [Google Scholar] [CrossRef]
- Jain, V.; Sethi, P.; Arya, S.; Verma, R.; Chawla, C. Project Evaluation Using Critical Path Method & Project Evaluation Review Technique. Wesley. J. Res. 2020, 13, 1–9. [Google Scholar]
- Xie, L.; Chen, Y.; Chang, R. Scheduling optimization of prefabricated construction projects by genetic algorithm. Appl. Sci. 2021, 11, 5531. [Google Scholar] [CrossRef]
- Zhu, A.; Dai, T.; Xu, G.; Pauwels, P.; De Vries, B.; Fang, M. Deep Reinforcement Learning for Real-Time Assembly Planning in Robot-Based Prefabricated Construction. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1515–1526. [Google Scholar] [CrossRef]
- Faghihi, V.; Reinschmidt, K.F.; Kang, J.H. Construction scheduling using genetic algorithm based on building information model. Expert Syst. Appl. 2014, 41, 7565–7578. [Google Scholar] [CrossRef]
- Oltra-Badenes, R.; Guerola-Navarro, V.; Gil-Gómez, J.-A.; Botella-Carrubi, D. Design and Implementation of Teaching–Learning Activities Focused on Improving the Knowledge, the Awareness and the Perception of the Relationship between the SDGs and the Future Profession of University Students. Sustainability 2023, 15, 5324. [Google Scholar] [CrossRef]
- Cavallo, M.A.; Ledesma, A.B.; Diaz, L.P.; Facco, S.M.d.L.; Benzi, C.S.; Schmidt Strano, E. Convergencia ODS-universidad. Una propuesta para conocer las expectativas y percepciones de la comunidad académica acerca de la agenda 2030. Inf. Investig. IIATA 2020, 5, 69–81. [Google Scholar] [CrossRef]
- Gong, P.; Teng, Y.; Li, X.; Luo, L. Modeling constraints for the on-site assembly process of prefabrication housing production: A social network analysis. Sustainability 2019, 11, 1387. [Google Scholar] [CrossRef]
- Ji, Y.; Qi, L.; Liu, Y.; Liu, X.; Li, H.X.; Li, Y. Assessing and prioritising delay factors of prefabricated concrete building projects in China. Appl. Sci. 2018, 8, 2324. [Google Scholar] [CrossRef]
- Hong, Y.; Xie, H.; Agapaki, E.; Brilakis, I. Graph-Based Automated Construction Scheduling without the Use of BIM. J. Constr. Eng. Manag. 2023, 149, 05022020. [Google Scholar] [CrossRef]
- Liu, H.; Lei, Z.; Li, H.X.; Al-Hussein, M. An automatic scheduling approach: Building information modeling-based onsite scheduling for panelized construction. In Proceedings of the Construction Research Congress 2014: Construction in a Global Network, Atlanta, Georgia, 19–21 May 2014. [Google Scholar] [CrossRef]
- Zhou, J.; Love, P.E.D.; Wang, X.; Teo, K.L.; Irani, Z. A review of methods and algorithms for optimizing construction scheduling. J. Oper. Res. Soc. 2013, 64, 1091–1105. [Google Scholar] [CrossRef]
- Ng, S.T.; Zhang, Y. Optimizing construction time and cost using ant colony optimization approach. J. Constr. Eng. Manag. 2008, 134, 721–728. [Google Scholar] [CrossRef]
- Zhang, H.; Li, H.; Tam, C. Particle swarm optimization for resource-constrained project scheduling. Int. J. Proj. Manag. 2006, 24, 83–92. [Google Scholar] [CrossRef]
- Moon, H.; Kim, H.; Kamat, V.R.; Kang, L. BIM-based construction scheduling method using optimization theory for reducing activity overlaps. J. Comput. Civ. Eng. 2015, 29, 04014048. [Google Scholar] [CrossRef]
- Nusen, P.; Boonyung, W.; Nusen, S.; Panuwatwanich, K.; Champrasert, P.; Kaewmoracharoen, M. Construction planning and scheduling of a renovation project using BIM-based multi-objective genetic algorithm. Appl. Sci. 2021, 11, 4716. [Google Scholar] [CrossRef]
- Anvari, B.; Angeloudis, P.; Ochieng, W. A multi-objective GA-based optimisation for holistic Manufacturing, transportation and Assembly of precast construction. Autom. Constr. 2016, 71, 226–241. [Google Scholar] [CrossRef]
- Gonçalves, J.F.; Mendes, J.; Resende, M. A genetic algorithm for the resource constrained multi-project scheduling problem. Eur. J. Oper. Res. 2008, 189, 1171–1190. [Google Scholar] [CrossRef]
- Al-Tabtabai, H.; Alex, A.P. Using genetic algorithms to solve optimization problems in construction. Eng. Constr. Archit. Manag. 1999, 6, 121–132. [Google Scholar] [CrossRef]
- Essam, N.; Khodeir, L.; Fathy, F. Approaches for BIM-based multi-objective optimization in construction scheduling. Ain Shams Eng. J. 2023, 14, 102114. [Google Scholar] [CrossRef]
- Faghihi, V.; Nejat, A.; Reinschmidt, K.F.; Kang, J.H. Automation in construction scheduling: A review of the literature. Int. J. Adv. Manuf. Technol. 2015, 81, 1845–1856. [Google Scholar] [CrossRef]
- Huang, L.; Pradhan, R.; Dutta, S.; Cai, Y. BIM4D-based scheduling for assembling and lifting in precast-enabled construction. Autom. Constr. 2022, 133, 103999. [Google Scholar] [CrossRef]
- Shehata, M.E.; El-Gohary, K.M. Towards improving construction labor productivity and projects’ performance. Alex. Eng. J. 2011, 50, 321–330. [Google Scholar] [CrossRef]
- Kang, L.S.; Park, I.C.; Lee, B.H. Optimal schedule planning for multiple, repetitive construction process. J. Constr. Eng. Manag. 2001, 127, 382–390. [Google Scholar] [CrossRef]
- Vaux, J.S.; Kirk, W.M. Relationship conflict in construction management: Performance and productivity problem. J. Constr. Eng. Management 2018, 144, 04018032. [Google Scholar] [CrossRef]
- Moon, H.; Dawood, N.; Kang, L. Development of workspace conflict visualization system using 4D object of work schedule. Adv. Eng. Inform. 2014, 28, 50–65. [Google Scholar] [CrossRef]
- Kim, S.I.; Noh, Y.; Kang, Y.J.; Park, S.; Ahn, B. Fault classification model based on time domain feature extraction of vibration data. J. Comput. Struct. Eng. Inst. Korea 2021, 34, 25–33. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | ID | x | y | z | Level | Zone | Installation |
|---|---|---|---|---|---|---|---|
| 0 | 442407 | −43,609 | −112,333 | 3800 | 3 | A | 1 |
| 1 | 442452 | −32,609 | −112,333 | 3800 | 3 | B | 1 |
| 2 | 442559 | −21,609 | −112,333 | 3800 | 3 | A | 0 |
| 3 | 442636 | −10,609 | −112,333 | 3800 | 3 | B | 0 |
| 4 | 442687 | 390 | −112,333 | 3800 | 3 | A | 0 |
| Project Name | P knowledge Industry Center |
|---|---|
| Period | 2022~2024 |
| Structure | Precast concrete |
| Purpose | Knowledge industry center |
| Site area | |
| Building area | |
| Floor area | |
| No. of Floors | B1~10F |
| No. | ID | x | y | z | Level | Zone | Installation |
|---|---|---|---|---|---|---|---|
| 0 | 442407 | −43,609 | −112,233 | 3800 | 2 | A | 1 |
| 1 | 442452 | −32,609 | −112,233 | 3800 | 2 | A | 1 |
| 2 | 442559 | −390 | −112,233 | 3800 | 2 | A | 1 |
| … | … | … | … | … | … | … | … |
| 206 | 471581 | 390 | −161,853 | 15,850 | 5 | B | 0 |
| 207 | 471896 | 44,390 | −150,833 | 15,850 | 5 | B | 0 |
| 208 | 471941 | 21,609 | −150,833 | 15,850 | 5 | B | 0 |
| No. | Assembly Sequence (Component ID) | Penalty Score |
|---|---|---|
| 1 | 467570, 467680, 468432, 467598, 470266, 467678, 468567, 470268, 470279, 468477, 469197, 470288, 470297, … | 0.215 |
| 2 | 467650, 467670, 467676, 469242, 468522, 470278, 467572, 467652, 467648, 467570, 467554, 467598, 467668, 470257,… | 0.229 |
| 3 | 470297, 469242, 469197, 467678, 470278, 470265, 470268, 470264, 470259, 467572, 467570, … | 0.284 |
| 4 | 470279, 470269, 470257, 470266, 470276, 467648, 470265, 467590, 467606, 470297, 467650, … | 0.409 |
| 5 | 467676, 470278, 470287, 467678, 467648, 467570, 468567, 470279, 470288, 470259, 470297, 467552, … | 0.232 |
| 6 | 469242, 467668, 468477, 470269, 467598, 470277, 470266, 470303, 467590, 470265, 470268, 470257, … | 0.573 |
| 7 | 467598, 467646, 467570, 467590, 467674, 467668, 467676, 470276, 470264, 467652, 470297, … | 0.308 |
| … | ||
| 18 | 470257, 467674, 467552, 467676, 467606, 470276, 470266, 470259, 468477, 467680, 467648, … | 0.349 |
| 19 | 470266, 470279, 470269, 470259, 470287, 470257, 467606, 467676, 468522, 470276, 467588, 467650, … | 0.487 |
| 20 | 470258, 470276, 467646, 467570, 467588, 467676, 470297, 467670, 470303, 467678, 467606, … | 0.490 |
| … | ||
| N | Nth Assembly sequence | P |
| Type | No. | Evaluation |
|---|---|---|
| Advantage | 1 | In digitized construction sites, such management approaches are essential, and they are expected to aid in systematic on-site management. |
| 2 | When undertaking construction projects with PC structures in urban or similar areas, the scarcity of space for PC component storage necessitates a thorough assembly and delivery plan. Considering this, the study is anticipated to contribute by identifying the optimal assembly sequence to address these challenges. | |
| 3 | A system that verifies the anticipated assembly sequence through simulation proves highly beneficial for on-site management. | |
| Limitation | 1 | Consideration of additional variables occurring on site is essential. Developing an assembly plan that comprehensively integrates factors such as weather, manpower, and equipment would contribute to a more systematic assembly plan. |
| 2 | As construction sites continue to heavily depend on manpower, a successful application of this methodology requires a comprehensive management system, encompassing not only the construction phase but also information from all preceding stages, including transportation and delivery, to enhance feasibility. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bae, S.; Cha, H.; Jiang, S. Building an Information Modeling-Based System for Automatically Generating the Assembly Sequence of Precast Concrete Components Using a Genetic Algorithm. Appl. Sci. 2024, 14, 1358. https://doi.org/10.3390/app14041358
Bae S, Cha H, Jiang S. Building an Information Modeling-Based System for Automatically Generating the Assembly Sequence of Precast Concrete Components Using a Genetic Algorithm. Applied Sciences. 2024; 14(4):1358. https://doi.org/10.3390/app14041358
Chicago/Turabian StyleBae, Subin, Heesung Cha, and Shaohua Jiang. 2024. "Building an Information Modeling-Based System for Automatically Generating the Assembly Sequence of Precast Concrete Components Using a Genetic Algorithm" Applied Sciences 14, no. 4: 1358. https://doi.org/10.3390/app14041358