

LR-MPIBS: A LoRa-Based Maritime Position-Indicating Beacon System
Abstract
:1. Introduction
2. Materials and Methods
2.1. Overall System Design
2.1.1. Function Analysis
- (1)
- The automatic detection function of man overboard is an important guarantee for improving the alarm rate in such emergency situations. The height from the ship deck to the sea surface is generally greater than 3 m, and the drowning person may lose consciousness or go into shock, making it difficult to manually operate the alarm. It is necessary to implement the automatic detection of such incidents. This will improve the timeliness of the alarm.
- (2)
- Accurately locating people overboard is the basis of efficient marine rescue. Rescue teams can use accurate location information to make reasonable rescue decisions [21]. The LR-MPIBS is required to provide accurate global positioning information for a person in distress overboard.
- (3)
- The timely acquisition of rescue information is the core of man overboard rescue. Rescue teams need to obtain position information and identify people in distress as early as possible. LR-MPIBS can utilize long-distance wireless communication to reliably and securely transmit location information to rescue teams.
- (4)
- The important function of the beacon system is to display the operating status of the equipment in a prominent and clear manner. Drowning people are prone to negative emotions such as fear, anxiety, and despair. They use the visual indicators to check the system status and external rescue information, which helps to stabilize their emotions.
2.1.2. System Architectural Design
- (1)
- System-Hardware Layer: This is the hardware foundation of LR-MPIBS. The system-hardware layer is divided into PIT and SMBS parts. The main control module of the PIT implements data acquisition, wireless communication, light indication, and other control functions. The Falling Water Detection (FWD) module monitors the situation of personnel falling into the water in real time, and automatically turns on the PIT after the crew falls into the water. The Beidou positioning module is used to realize the precise positioning of the drowning person. The wireless communication module uses LoRa technology to transmit data between the PIT and the SMBS under the harsh marine environment. The button and indicator module are used for switching the operation mode of the PIT and displaying the operation and rescue status to personnel in distress. The power-management module is responsible for voltage conversion and supplying power to the equipment. The master control module, wireless communication module, and power-management module of the SMBS have similar functions as their counterparts in the PIT. The computer communication module of the SMBS forwards valid rescue information from the PIT to the rescue team.
- (2)
- Communication Protocol Layer: This defines the communication protocol format of each module within the LR-MPIBS to ensure safe and accurate data transmission. The Beidou communication protocol of the PIT allows the positioning module to transmit NMEA-0813 messages to the main control module. The LoRa wireless communication protocol includes the rescue information protocol of PIT and the response information protocol of SMBS. The rescue information protocol is used to encapsulate basic rescue information such as personnel identifiers and locations, while the response information protocol is used to encapsulate communication responses and base station numbers. The SMBS drowning rescue data transmission protocol forwards distress rescue information to rescue teams.
- (3)
- Data-Processing Layer: It processes positioning and rescue data to ensure the validity and reliability of communication data. The verification of the validity of positioning data is used to filter data with large deviations. The extracting of key positioning data is used to extract key turning points in the trajectory of individuals drifting at sea. The compression of positioning data is used to compress key positioning data in wireless communication cycles and reduce communication traffic. The verification of SMBS rescue information is used to verify the integrity of rescue information.
2.2. Design and Implementation of System Hardware
2.2.1. Main Control Module
2.2.2. Falling-Water-Detection (FWD) Module of the Position-Indicating Terminal
2.2.3. Wireless Communication Module
2.2.4. Power-Management Module of the Position-Indicating Terminal
2.3. Workflow and Data-Processing Algorithm
2.3.1. Workflow of the LR-MPIBS System
2.3.2. The Positioning Data Processing Algorithm of PIT
- (1)
- Verify The Positioning Data Validity: A maximum distance estimation model for drowning drift is designed to test the effectiveness of the positioning data obtained during the receiving cycle, discarding large deviation data. The maximum drift distance () estimation formula is
- (2)
- Extract The Key Positioning Data: The positioning data collection frequency of LR-MPIBS is 1 Hz, and the minimum alarm transmission cycle is 30 s. If all valid data within the cycle are encapsulated and sent, there is a large amount of redundant information in the rescue information packet. Long data packets can lead to increased energy consumption and may reduce the success rate of data transmission [31]. We design a Key Positioning Data Extraction Algorithm (KPDEA) for the drift trajectory of personnel on the sea surface, which extracts key positioning data and stores it in the arrayKPD. These data are used for subsequent compression and encapsulation.
- (3)
- Compress The Key Positioning Data: arrayKPD contains multiple key positioning data, which are calculated and stored using floating-point data types. This article focuses on the continuous features of key positioning data in spatial distribution and designs an improved differential encoding method to reduce the space occupied by key positioning data. The compression method is as shown in Formula (10).
2.3.3. Design of Wireless Communication Protocol
- (1)
- Rescue Information Protocol for PIT: The frame format of the rescue information protocol of the PIT is shown in Table 2. This includes the header, message length, message body, check digit, and tail. The header and the tail are 0xEF and 0xFE, respectively. These are used to separate and identify the information. The message length helps the message content to be correctly parsed. The message body is the main object of transmission, and it includes the information required for emergency rescue. The CRC16 algorithm is employed for the check digit, which is used to detect whether the information has been tampered with, and the algorithm’s polynomials are

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Message Head | Message Length | Message Body | Check Digit | Message Tail |
|---|---|---|---|---|
| 0xEF | 4 i + 25 | Basic rescue information | Content validation | 0xFE |
- (2)
- Response Information Protocol for SMBS: The content of the SMBS response information is shown in Table 4. This includes ID information and function information. The ID information contains the base-station ID and personnel ID, which each consist of eight characters. The function information is used to convey the current status of the rescue team to the person in distress; a value of 0x11 indicates that the rescue operation has started and the indicator light of the PIT will be switched to white to pacify the person in distress.
3. Results and Discussion
3.1. Falling-Water-Detection Module Test of PIT
3.2. Initial Satellite-Search Performance Test of PIT
3.3. Communication Performance Test of LR-MPIBS
- (1)
- Urban Roadway Environment: Frequent occlusion by vehicles, trees, pedestrians, and buildings led to poorer communication success rates. Specifically, at a distance of 2000 m, the communication success rate was 18% higher than that at 1500 m, reflecting the fact that the communication performance was more affected when encountering strong occlusions.
- (2)
- Seashore Environment: In the seashore environment, there was less occlusion, and the communication success rate plummeted to 80% at 500 m where there was occlusion by a tall building in close proximity. However, in the process of getting farther away from this high-rise building, the communication quality gradually increased to 99%. Within a range of 3500 to 5000 m, there was a cattle island obstructing the communication of LR-MPIBS, but it still had a communication success rate of over 86%. This indicates that the communication system possesses excellent diffraction performance.
- (3)
- Sea-Surface Environment: A situation in which the PIT is floating on the sea surface with a man in distress was simulated. The sea surface had fewer strong obstructions, but there was periodic wave interference. A communication success rate of greater than 83% was demonstrated in all distance segments within 5000 m. At distances from 4000 to 5000 m, even in the presence of island occlusions, there was still an 85% communication success rate.
- (4)
- Summary: These experimental results show that the LR-MPIBS is able to transmit rescue information stably within 5 km.
3.4. Validation of Extracting of Key Positioning Data
3.5. Endurance Test of PIT
3.6. Marine Comprehensive Testing of LR-MPIBS
- (1)
- Man Overboard Detection Stage: We simulated the scene of personnel wearing equipment falling into the water and threw two PITs (named 13312 and 13568) onto the sea surface. After PIT fell into the water for 15 s and 13 s, respectively, SMBS received rescue information (without accurate positioning data). About 60 s after PIT fell into the water, SMBS received rescue information with accurate positioning data, as shown in Figure 15.
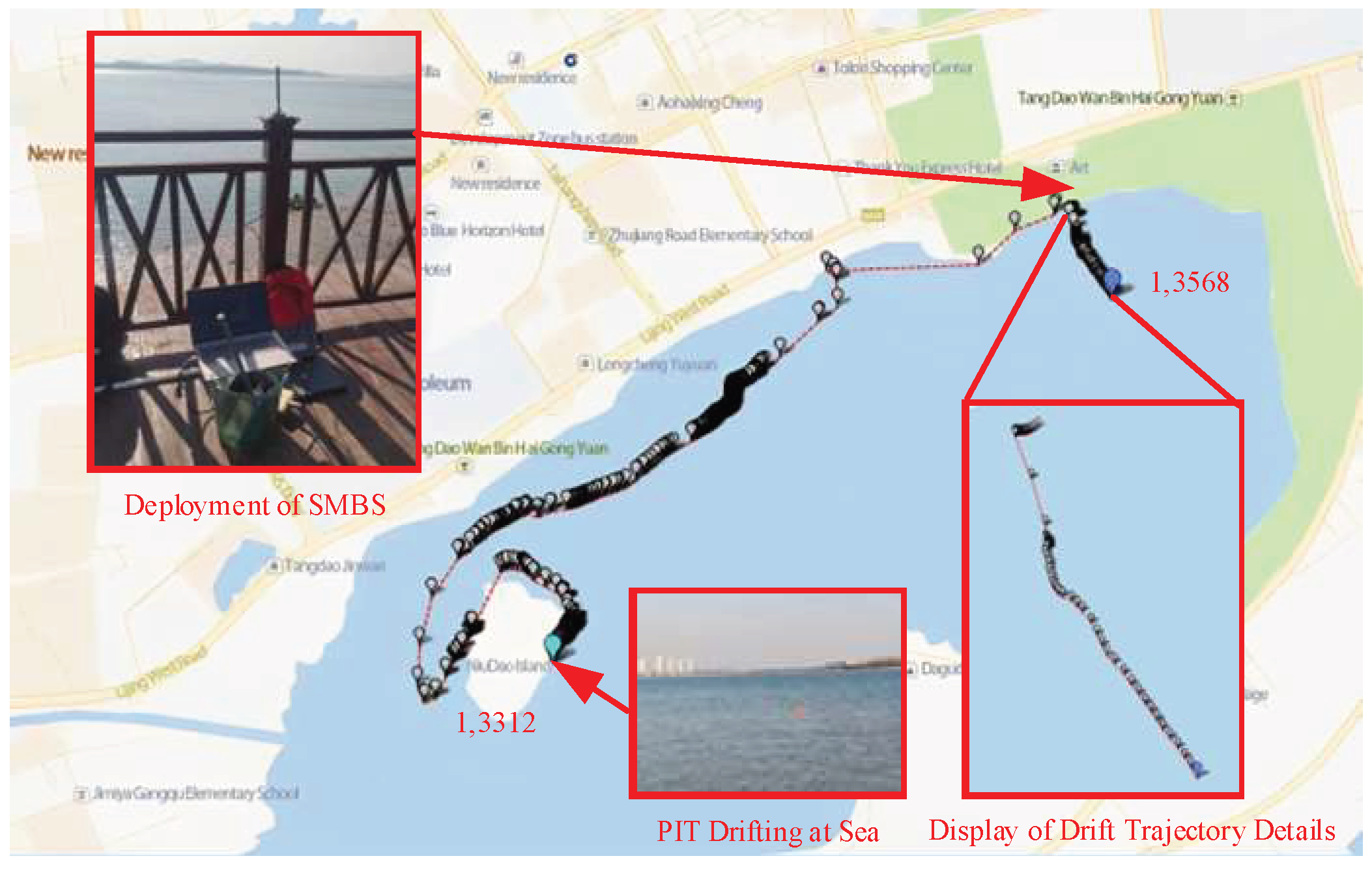
- (2)
- Rescue Information Transmission Stage: The 13568 was placed on the sea for free drifting, simulating a static drifting scene of a drowning person. The 13312 was dragged and moved by a speedboat, simulating the scene of a drowning person drifting with the waves. The drift trajectory of the sea comprehensive test is shown in Figure 16: the 13568 drifted freely at sea for 1 h, receiving a total of 120 alarm messages. The farthest communication distance was about 661.4 m, and the communication success rate was 100%. The 13312 drifted dynamically at sea for two hours (average speed: 3.7 m/s), receiving a total of 213 messages, with a maximum communication distance of approximately 3267.5 m and a communication success rate of 88.75%. During the process of towing 13312, the speedboat changed its course multiple times, and PIT was able to track and extract key positioning information in a timely manner and send it to SMBS.
- (3)
- Emergency Search and Rescue Phase: The rescue team carried out rescue PIT work based on the positioning data received by SMBS, and the rescue site is shown in Figure 17.
3.7. Performance Comparison
4. Conclusions
- (1)
- The design principles and methods of the falling water detection module are detailed, and the reliability of the circuit operation was tested. The FWD module can automatically detect and trigger startup after 3 s of falling into the water. Its current consumption during equipment shutdown is 10.1 µA, and its current consumption during water detection is less than 90 µA.
- (2)
- We analyzed the impact of the LoRa RF path impedance value on communication performance, and designed it to be 50 Ω through software simulation. The LoRa wireless communication protocol was designed, which includes the rescue protocol of PIT and the response protocol of SMBS. This aims to achieve reliable communication between personnel in distress and rescue teams.
- (3)
- The interference of power-supply ripple on RF was analyzed, along with the instabilities in the power-supply voltage caused by the sudden change in current during RF communication. In this study, we designed a power management module that can withstand a maximum transient current of 1 A, and its output voltage ripple is below 45 mV.
- (4)
- We designed positioning data processing algorithms, including those for verifying the effectiveness of positioning data, extracting key positioning data, and compressing key positioning data. The recognition rate of key positioning data was 97.67% and its compression rate was 50%.
- (5)
- The experimental results show that the system can automatically detect and sound the alarm for personnel drowning incidents. After the PIT is turned on, the search time for satellites does not exceed 50 s, the effective communication distance is no less than 5 km, and the battery life is 25 h during continuous operation. The experimental results are stable and reproducible. The marine comprehensive testing results of LR-MPIBS further demonstrate its practicality in the rescue process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Su, Z.; Liu, X.; Zheng, G.; Zhou, K.; Gao, S. Serviceability of the IAMSAR standard man overboard recovery maneuvers: A case-study of full-scale sea trials. Appl. Ocean Res. 2021, 114, 102782. [Google Scholar] [CrossRef]
- Armeniakos, C.K.; Nikolaidis, V.; Tsekenis, V.; Maliatsos, K.; Bithas, P.S.; Kanatas, A.G. Human fall detection using mmWaveradars: A cluster-assisted experimental approach. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 11657–11669. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, K.; Zhang, Y.; Gao, J. Design of underwater emergency positioning system based on BD/GPS. Foreign Electron. Meas. Technol. 2021, 40, 87–93. [Google Scholar] [CrossRef]
- Lin, W. Design and Realisation of Alarm Device for People Overboard; Dalian Maritime University: Dalian, China, 2011. [Google Scholar]
- Bing, Z. Research and Design of Maritime Search and Rescue System; Fudan University: Shanghai, China, 2013. [Google Scholar]
- Li, X.; Song, H.; Liu, C. Path loss modeling for wireless network deployment in water surface environments. IEEE Antennas Wirel. Propag. Lett. 2022, 21, 1090–1094. [Google Scholar] [CrossRef]
- El Agroudy, N.; Georgiades, G.; Joram, N.; Ellinger, F. RSSI overboard localization system for safe evacuation of large passengers ships. In Proceedings of the 13th Conference on Ph.D. Research in Microelectronics and Electronics, Taormina, Italy, 12–15 June 2017; Volume 2017, pp. 177–180. [Google Scholar] [CrossRef]
- Sheu, B.-H.; Yang, T.-C.; Yang, T.-M.; Huang, C.-I.; Chen, W.-P. Real-time Alarm, Dynamic GPS Tracking, and Monitoring System for Man Overboard. Sens. Mater. 2020, 32, 197. [Google Scholar] [CrossRef]
- Mao, X.; Liu, X.; Feng, T.; Chen, K. A communication protocol of man overboard system based on BeiDou. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1910–1911. [Google Scholar] [CrossRef]
- Xiang, S.; Peiren, W.U. Maritime emergency SAR system based on BeiDou satellite navigation system. Command Control Simul. 2018, 40, 43–49. [Google Scholar]
- Gürüler, H.; Altun, M.; Khan, F.; Whangbo, T. Man overboard detection system using iot for navigation model. Comput. Mater. Contin. 2022, 71, 4955–4969. [Google Scholar] [CrossRef]
- Huang, P.-F.; Du, Z.-X.; Cheng, C.-F.; Chen, J.-H. The design and development of man overboard alarm and rescue terminal. J. Discret. Math. Sci. Cryptogr. 2016, 19, 649–661. [Google Scholar] [CrossRef]
- Dong, Z. Design and Implementation of the Miniature, Personal and Nautical AIS-EPIRB; Xi’an University of Electronic Science and Technology: Xi’an, China, 2014. [Google Scholar]
- Huanhuan, H. Study Emergency Position Indicating Radio Beacon on AIS; Dalian Maritime University: Dalian, China, 2011. [Google Scholar]
- Li, Y.; Chung, K.L.; Xie, S.; Yang, Y.; Wang, M.; Geng, X. An improved design of automatic-identification-system-based man overboard device: A multidisciplinary product. IEEE Access 2018, 6, 25220–25229. [Google Scholar] [CrossRef]
- Wu, H.-T. The design discussion of a self-powered automatic identification system sensor. IEEE Sens. J. 2023, 23, 20766–20772. [Google Scholar] [CrossRef]
- Hu, B. Research of Maritime Fallen Overboard Automatic Alarm System Based on Beidou; Shanghai Ocean University: Shanghai, China, 2016. [Google Scholar]
- Horstmann, T.; Michael, R.; Marco, R.; Simon, W. Evaluation of LoRa in a Real-World Smart City: Selected Insights and Findings. Mobile Communication—Technologies and Applications. In Proceedings of the 27th ITG-Symposium, Osnabrück, Germany, 10–11 May 2023; pp. 91–96. [Google Scholar]
- Yang, Y.J. Design and research of low-power wireless water quality sensor based on LoRa. China New Commun. 2021, 23, 10–11. [Google Scholar]
- Patriti, T.; Mirri, S.; Girau, R. A LoRa-mesh based system for marine Social IoT. In Proceedings of the IEEE 20th Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2023; Volume 2023, pp. 329–332. [Google Scholar] [CrossRef]
- Zhou, F.; Chen, H.; Zhang, P. Performance evaluation of maritime search and rescue missions using automatic identification system data. J. Navig. 2020, 73, 1237–1246. [Google Scholar] [CrossRef]
- Brojdo, S. Characteristics of the dielectric diode and triode at very high frequencies. Solid State Electron. 1963, 6, 611–629. [Google Scholar] [CrossRef]
- Sevin, A.; Bayilmiş, C.; Ertürk, I.; Ekiz, H.; Karaca, A. Design and implementation of a man-overboard emergency discovery system based on wireless sensor networks. Turk. J. Electr. Eng. Comp. Sci. 2016, 24, 762–773. [Google Scholar] [CrossRef]
- Satheesh, J.; Nair, A.P.; Devipriya, M.; Chithra, A.; Mahesh, G.; Jayasree, P.R. Wireless communication-based water surface cleaning boat. In Proceedings of the 4th International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 15–17 June 2020; Volume 48184, pp. 716–720. [Google Scholar]
- Hoang, Q.L.; Jung, W.-S.; Yoon, T.; Yoo, D.; Oh, H. A real-time LoRa protocol for industrial monitoring and control systems. IEEE Access 2020, 8, 44727–44738. [Google Scholar] [CrossRef]
- Kang, E.; Min, W.; Choo, H. Stretchable helical antenna with an inverted-F feeding structure for man overboard devices. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 2220–2224. [Google Scholar] [CrossRef]
- Kaur, M.; Kakar, S.; Mandal, D. Electromagnetic interference. In Proceedings of the 3rd International Conference on Electronics Computer Technology, Kanyakumari, India, 8–10 April 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Dala, A.; Arslan, T. Design, implementation, and measurement procedure of underwater and water surface antenna for LoRa communication. Sensors 2021, 21, 1337. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.Y.; Dang, Y.M.; Xue, S.Q. Preliminary discussion of multipath effect model on the sea. J.Surv. Mapp. Sci. 2013, 1, 122–124. [Google Scholar]
- Yang, X.; Haas, K.A.; Fritz, H.M.; French, S.P.; Shi, X.; Neary, V.S.; Gunawan, B. National geodatabase of ocean current power resource in USA. Renew. Sustain. Energy Rev. 2015, 44, 496–507. [Google Scholar] [CrossRef]
- Zhao, H. On the link quality measurement in wireless sensor network. J. Northeast. Univ. Nat. Sci. Ed. 2008, 2, 193–196. [Google Scholar]
- Millero, F.J.; Feistel, R.; Wright, D.G.; McDougall, T.J. The composition of Standard Seawater and the definition of the Reference-Composition Salinity Scale. Deep Sea Res. Part I 2008, 55, 50–72. [Google Scholar] [CrossRef]
- Wu, J.; Cheng, L.; Chu, S. Modeling the leeway drift characteristics of persons-in-water at a sea-area scale in the seas of China. Ocean Eng. 2023, 270, 113444. [Google Scholar] [CrossRef]
- Qu, J.; Wang, J. A design and implementation of beidou beacon technology for therescue of the drowning personnel at sea. Electron. Meas. Technol. 2019, 42, 63–68. [Google Scholar] [CrossRef]

















| RF transmission line width (mil) | 6.5 | 7.5 | 10.5 | 12.5 | 21.71 |
| Simulated value of RF transmission line impedance (Ω) | 66.91 | 64.75 | 59.8 | 57.36 | 50 |
| Communication distance (m) | 28 | 113 | 1289 | 3126 | 3631 |
| Field Name | Content | Data Type | Length (Bytes) |
|---|---|---|---|
| Number information | Base-station number | Char | 16 |
| Personnel number | Char | ||
| Latest valid positioning data | Longitude data | Float | 8 |
| Latitude data | Float | ||
| (m)th key positioning information | Longitude increment | Short | 4 |
| Latitude increment | Short | ||
| (m − 1)th key positioning information | Longitude increment | Short | 4 |
| Latitude increments | Short | ||
| … | … | Short | … |
| … | … | Short | |
| (1)th key location information | Longitude increments | Short | 4 |
| Latitude increment | Short | ||
| Functional information | 0x22/0x23 | Char | 1 |
| Field Name | Contents | Data Type | Length (Bytes) |
|---|---|---|---|
| ID information | Personnel ID | Char | 8 |
| Base-station ID | Char | 8 | |
| Functional information | 0x10/0x11 | Char | 1 |
| Institute | This Work | GD Panco Co., Ltd. | XING YU Co., Ltd. | Dalian Scientific Test Inst [34] | XIDIAN UNIVERSITY [13] | NUC [3] |
|---|---|---|---|---|---|---|
| Communication/Positioning Methods | LoRa/BDS | RSMC/BDS | RSMC/BDS | LoRa/BDS | AIS/GPS | GPRS/GPS |
| Startup Time For Man Overboard Detection | 3 s | 5 s | 5 s | >60 s | - | 4~5 s |
| RNSS Cold Start | 50 s≤ | 60 s≤ | 40 s≤ | - | 27 s≤ | 60 s≤ |
| Positioning Error | 10 m< | 5 m< | 5 m< | 10 m< | 10 m< | 10 m< |
| Rescue Information Transmission Cycle | 30 s | 60 s | 60 s | 60 s | 60 s | 300 s |
| Communication Distance | ≥5 Km | The Coverage Area Of BDS | ≥3 Km | ≥9 Km | - | |
| Communication Success Rate | ≥85% | ≥95% | ≥95% | - | - | ≥98% |
| Key Information Extraction Of Drift Trajectory | Yea | No | No | No | No | No |
| Endurance | ≥25 H | ≥30 H | ≥17 H | - | ≥48 H | ≥8 H |
| Volume (mm) | 87 × 60 × 22 | 101 × 62 × 25 | 95 × 59 × 23 | - | - | - |
| ADDR | Guangdong, China | Nanjing, China | Dalian, China | Xi’an, China | Shanxi, China | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Dai, J.; Luan, Y.; Sun, N.; Du, L. LR-MPIBS: A LoRa-Based Maritime Position-Indicating Beacon System. Appl. Sci. 2024, 14, 1231. https://doi.org/10.3390/app14031231
Li Z, Dai J, Luan Y, Sun N, Du L. LR-MPIBS: A LoRa-Based Maritime Position-Indicating Beacon System. Applied Sciences. 2024; 14(3):1231. https://doi.org/10.3390/app14031231
Chicago/Turabian StyleLi, Zhengbao, Jianfeng Dai, Yuanxin Luan, Nan Sun, and Libin Du. 2024. "LR-MPIBS: A LoRa-Based Maritime Position-Indicating Beacon System" Applied Sciences 14, no. 3: 1231. https://doi.org/10.3390/app14031231