


Comparison of Unsteady Low- and Mid-Fidelity Propeller Aerodynamic Methods for Whirl Flutter Applications
 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
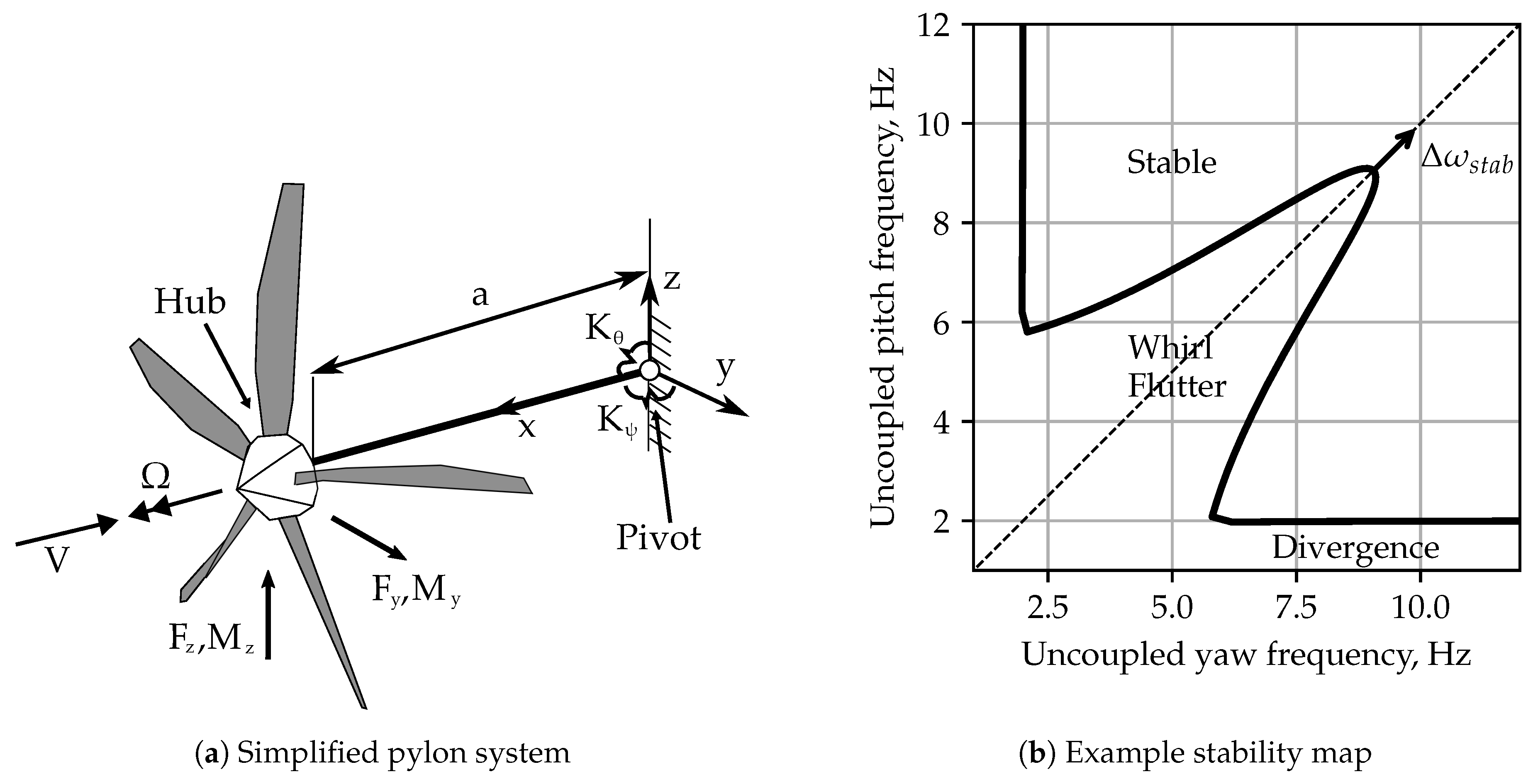
2.1. Houbolt/Reed Method
2.2. Aerodynamic Methods
- No compressibility effects: It is known from the literature that compressibility has a significant impact on whirl flutter stability through the change in the lift curve slope [28]. As most methods compared in this paper are based on potential flow aerodynamics, they neglect compressibility and can only account for it using correction techniques like Prandtl–Glauert correction factors. Despite being available in most codes, this correction is skipped for better comparability.
- Linear airfoil polars: To keep the number of parameters small and to make the comparison among codes easier, linear airfoil polars for a symmetric NACA 0008 airfoil in potential flow are used. This results in a linear lift curve with slope . All other contributions, like drag or camber effects, are neglected in this study.
- Limited number of operating conditions: The study is limited to a single operating range, a turboprop propeller in fast forward flight, since operating conditions with high advance ratios are the most relevant for whirl flutter.
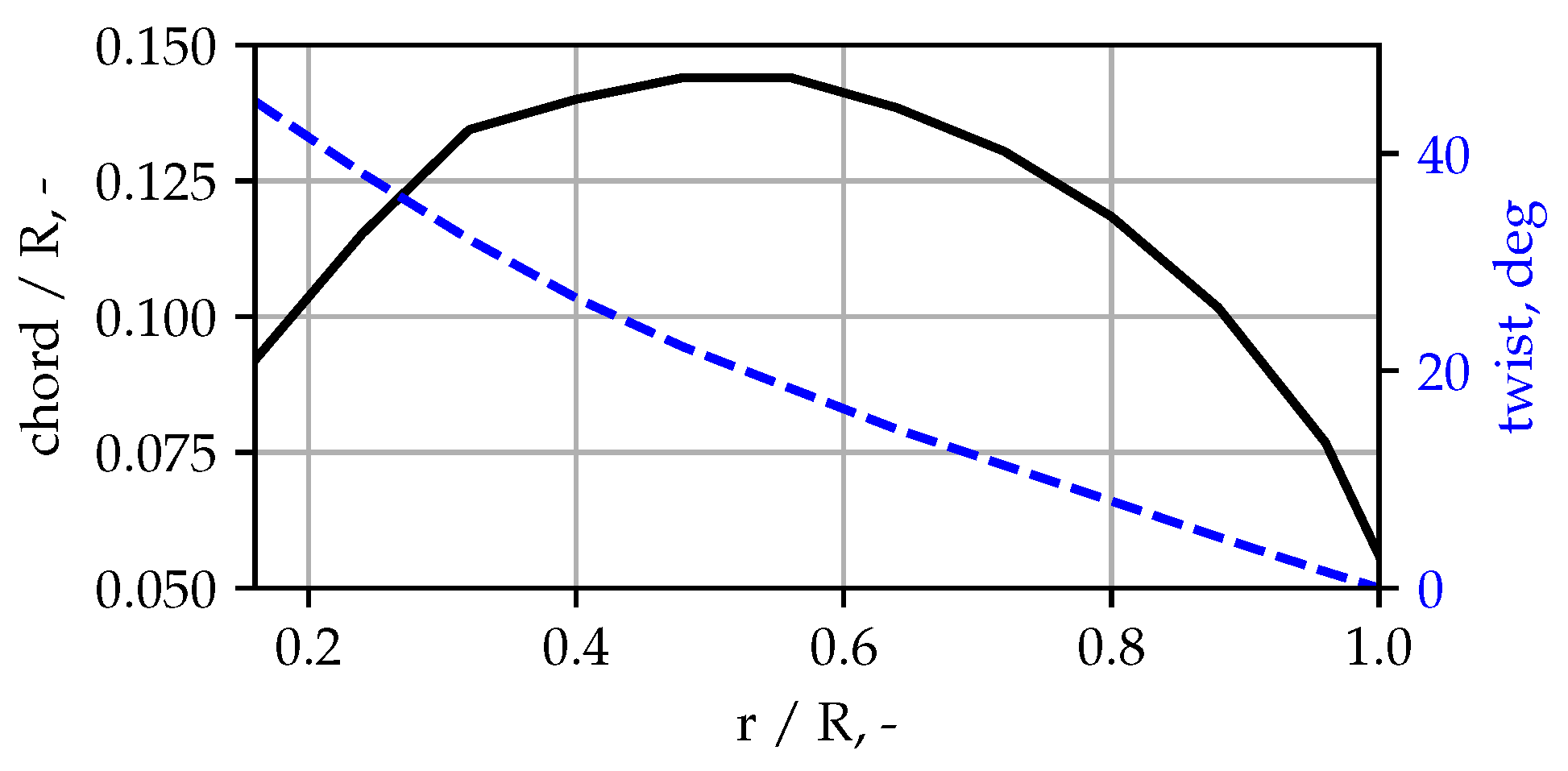
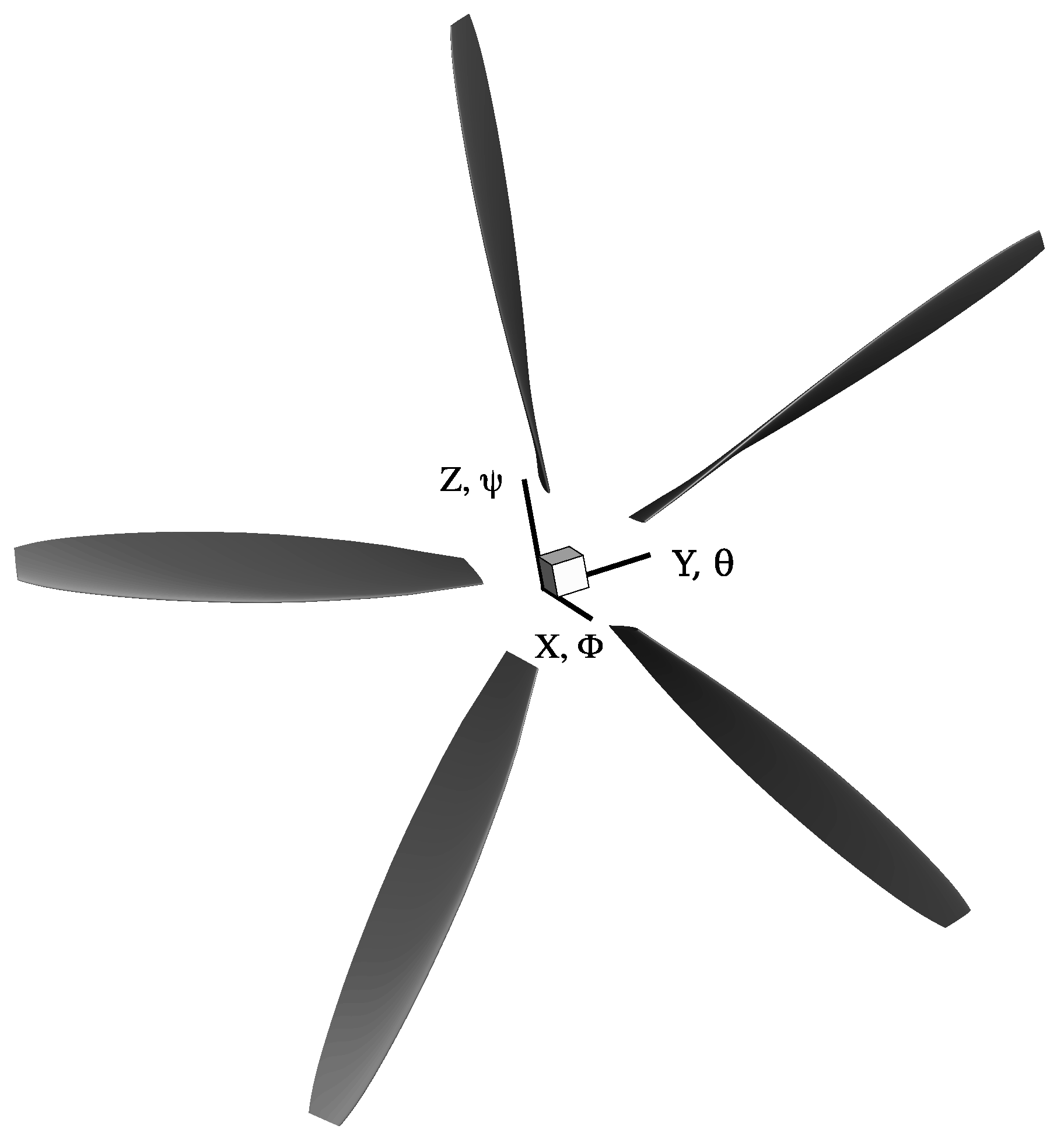
- Only one geometry: Only a generic five-bladed turboprop propeller is used for this study. No variations with respect to the blade aspect ratio, the number of blades or the blade geometry are conducted.
- Only blade aerodynamics: In this work, only the unsteady aerodynamics attributed to the propeller blades are studied. Contributions from the spinner, nacelle or wing are neglected.
- Rigid propeller blades: To perform a comparison with the classical Houbolt/Reed derivatives, the propeller blades are assumed to be rigid. For a study on the influence of elasticity, the reader is referred to the literature (e.g., Koch and Koert [15]).
2.3. Transfer Matrix Method
- Trimming to a steady operating point in axial flowThe propeller is trimmed to achieve a target steady thrust coefficient and to bring the system to an equilibrium, around which the perturbations are employed. Trimming is achieved by iteratively changing the blade pitch angle until matches the desired thrust. For each iteration, the system is integrated in time with a fixed blade pitch until a steady state in the hub loads is reached. The resulting equilibrium is saved for further restarts.
- Response of the system to steady disc pitch perturbation (1P hub loads)Instead of directly identifying the full, frequency-dependent transfer functions for hub motion perturbations, the quasi-steady response to disc pitch (or disc angle of attack) is identified first. Starting from the equilibrium point in "1.", the disc pitch angle is perturbed by a steady inclination, and the system is integrated in time until a steady state in the hub loads is achieved over one period.
- Perturbation of the hub motion and recording of the hub load responseTo identify the frequency-dependent transfer matrices, the propeller is perturbed in y-translation and disc pitch using unsteady pulse-shaped excitation (for low-fidelity methods) or harmonic forced motion (for mid-fidelity codes). The response of the hub load components in the time domain is recorded. The system is integrated in time until the transient response has decayed. For harmonic forced motion, this process is repeated for several perturbation frequencies (5 Hz, 10 Hz, 20 Hz) to cover the desired range for the frequency-domain flutter analysis.
- Identification of the frequency-domain transfer function from motion to loadsBy converting both motion and load time histories into the frequency domain using Fourier transformation, the frequency-domain transfer function from hub motion to hub loads can be identified through division. The scalar transfer functions (e.g., disc pitch to moment about the z-axis) are then arranged into the transfer matrices in Equation (12). Due to axial symmetry, the transfer functions for z-translation and disc yaw can be derived from symmetry and do not have to be calculated separately.
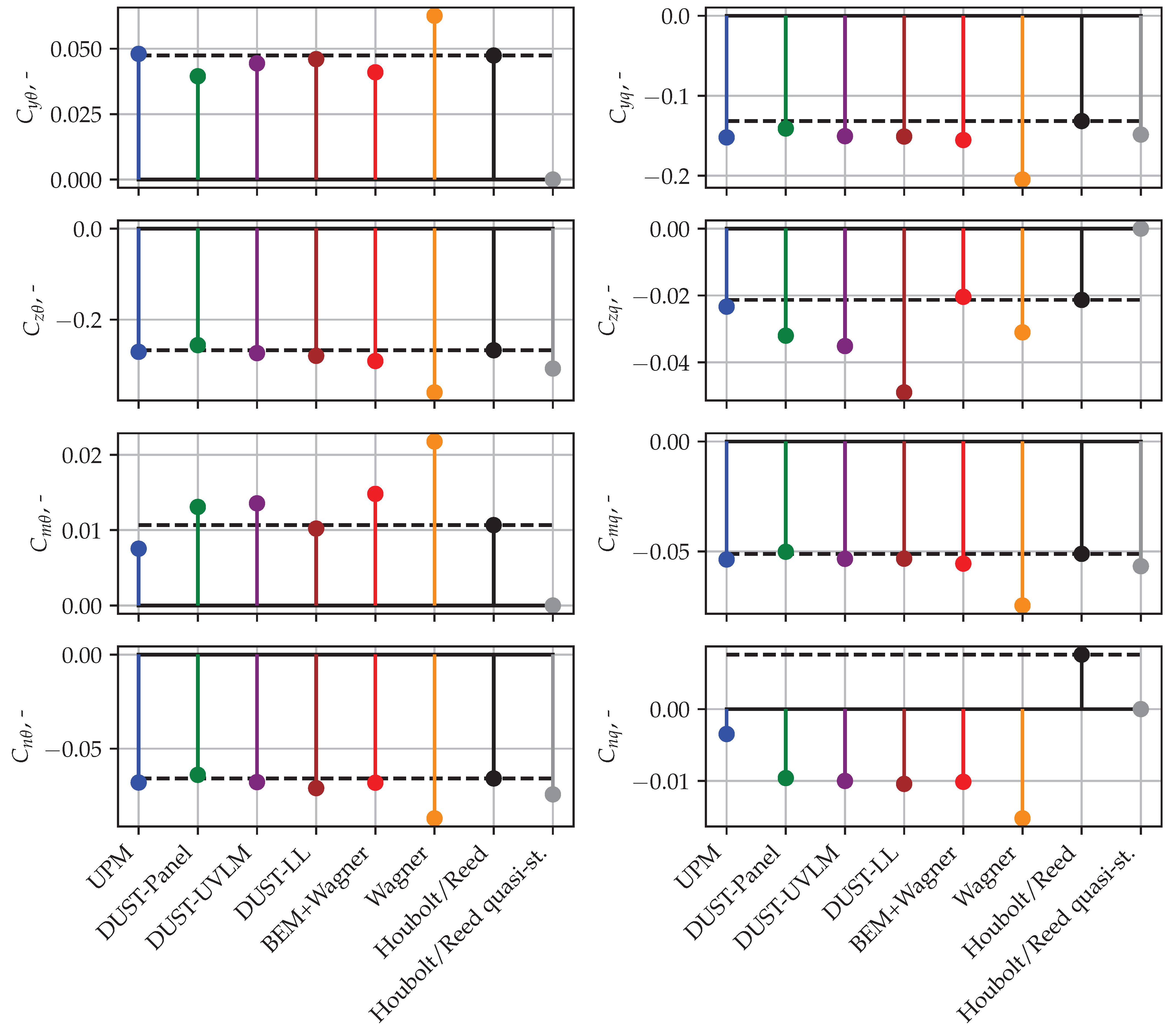
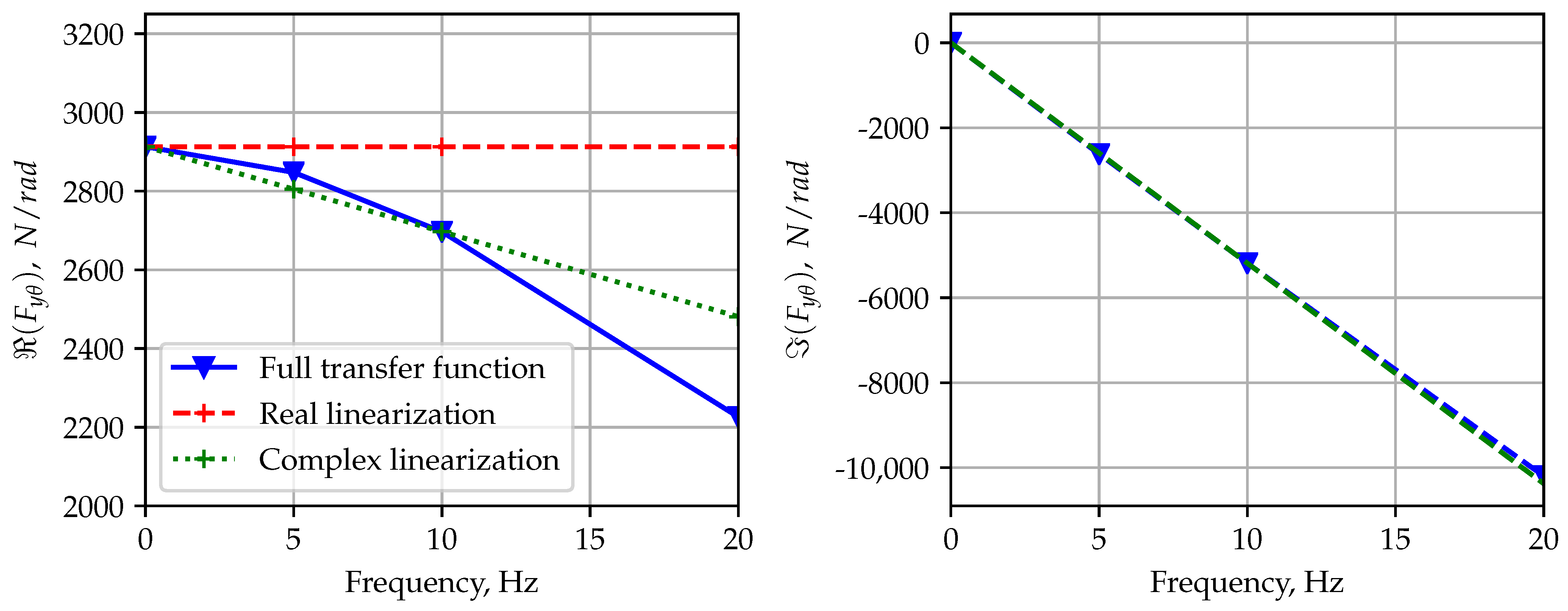
- Linearization with respect to frequencyfor comparison with Houbolt/Reed derivativesTo compare the frequency-dependent transfer matrices with the propeller derivatives by Houbolt and Reed, the transfer matrices are linearized with respect to frequency. The constant part of the real part is converted into the aerodynamic stiffness, and the linear slope of the imaginary part is used as aerodynamic damping (see Appendix A for more insights into the linearization procedure). By using the same non-dimensionalization as that by Houbolt and Reed, derivatives which can be used for direct comparison are obtained.
- Flutter solution in the frequency domain
2.4. Models
3. Results
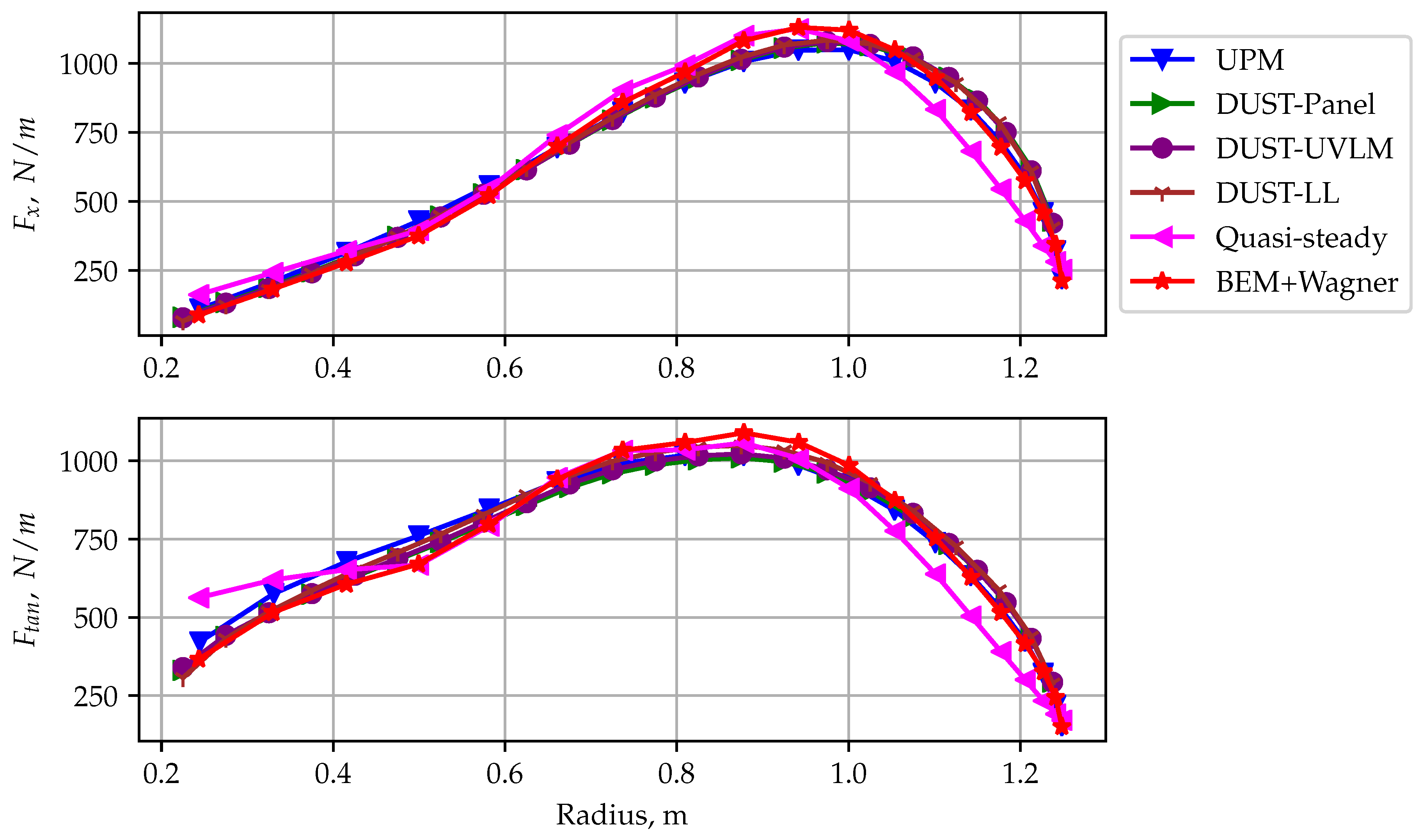
3.1. Comparison of Loads at Axial Inflow
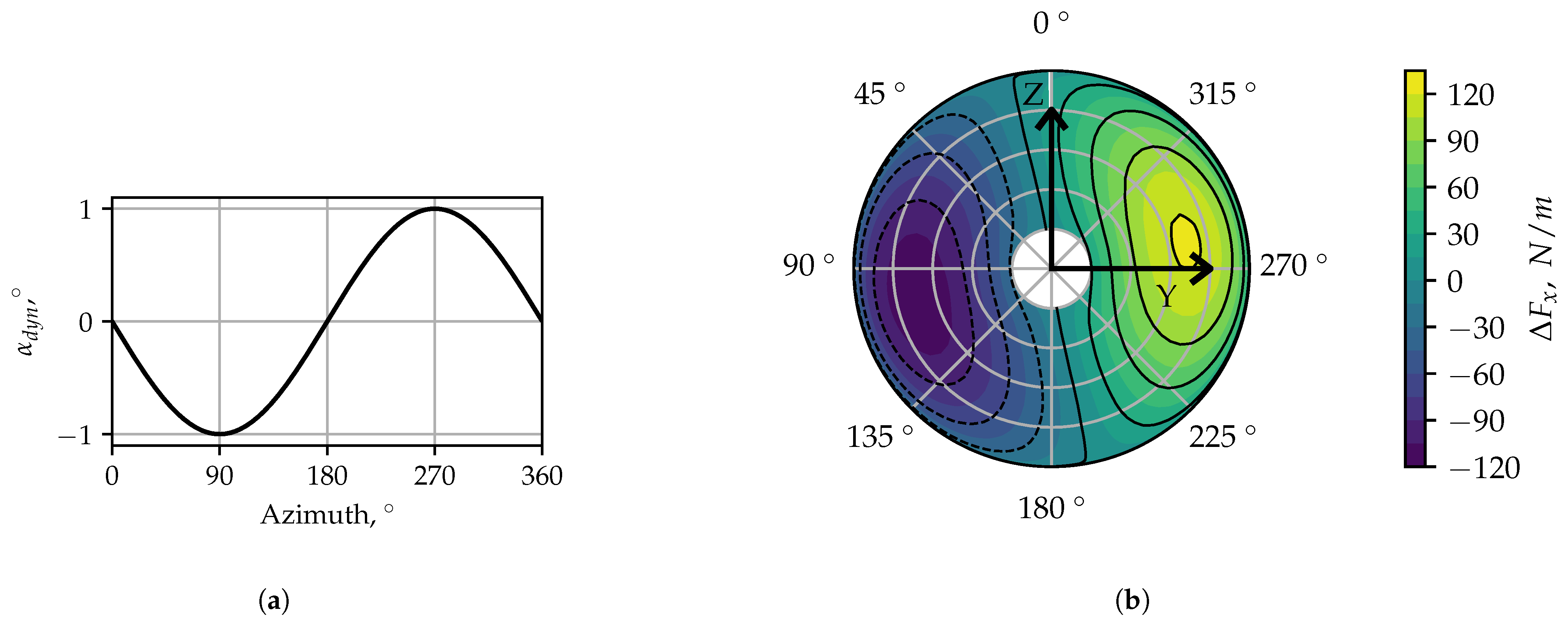
3.2. Loads for Steady Propeller Disc Pitch (1P Hub Loads)
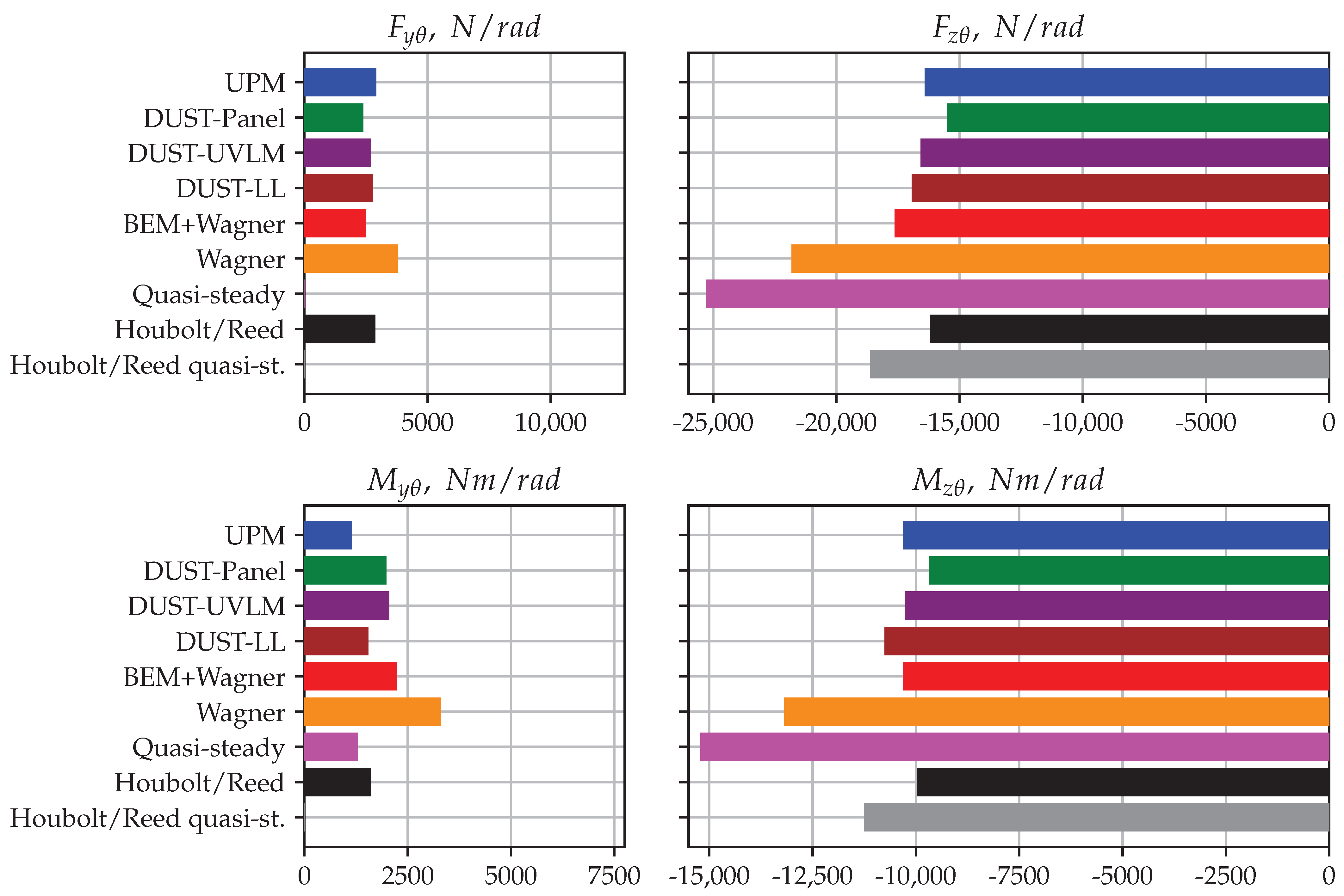
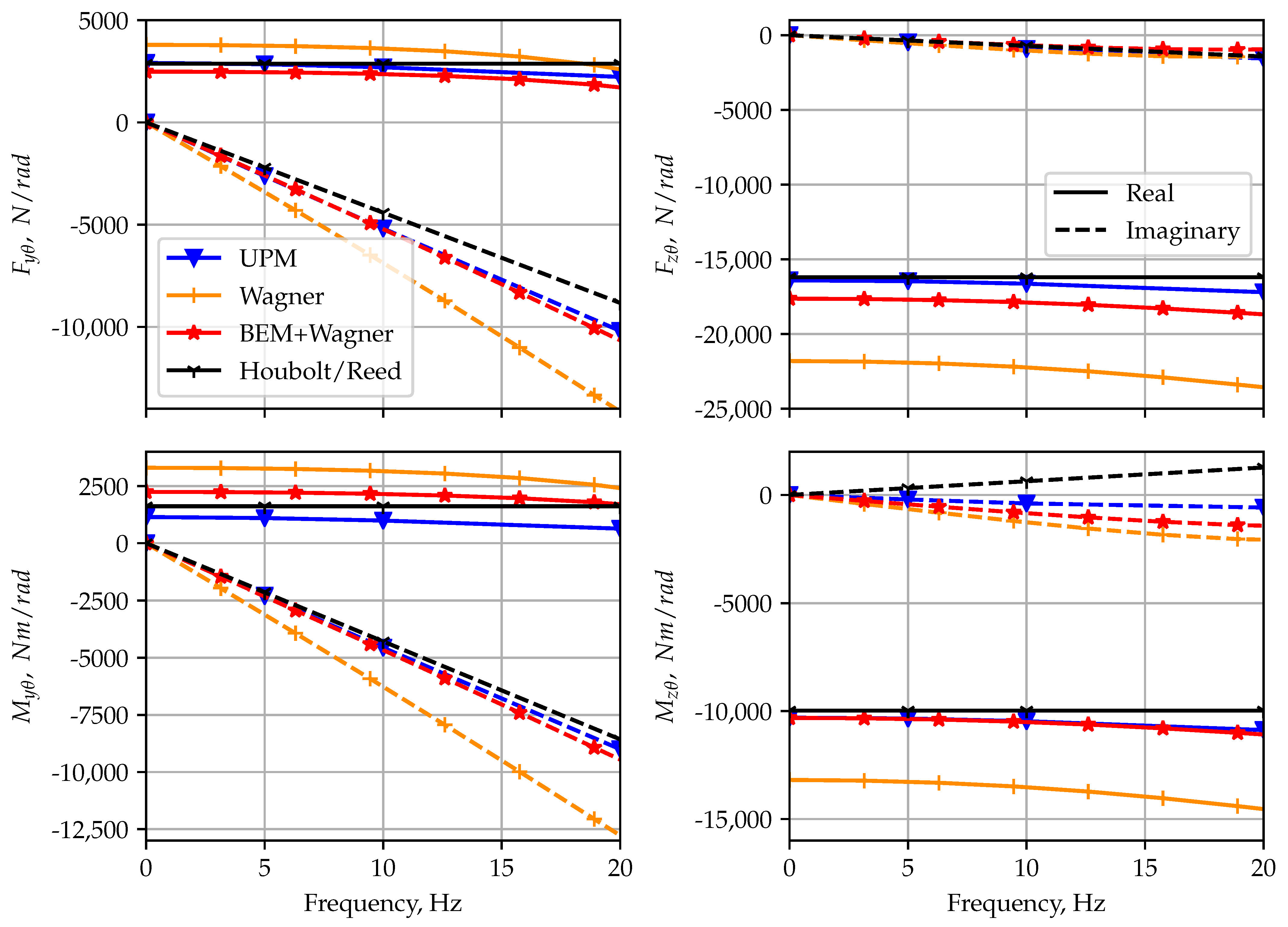
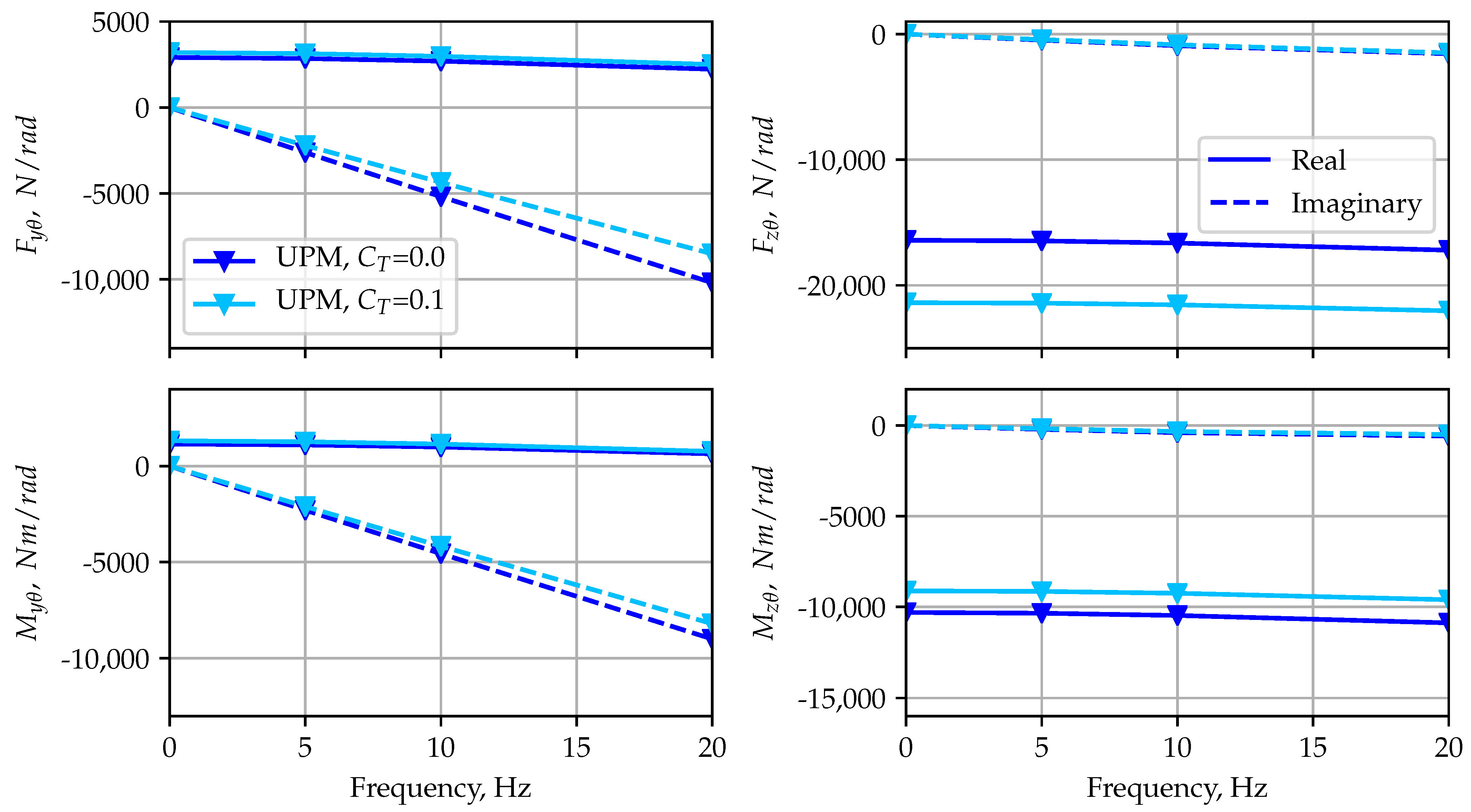
3.3. Loads and Transfer Matrices for Propeller Hub Motion
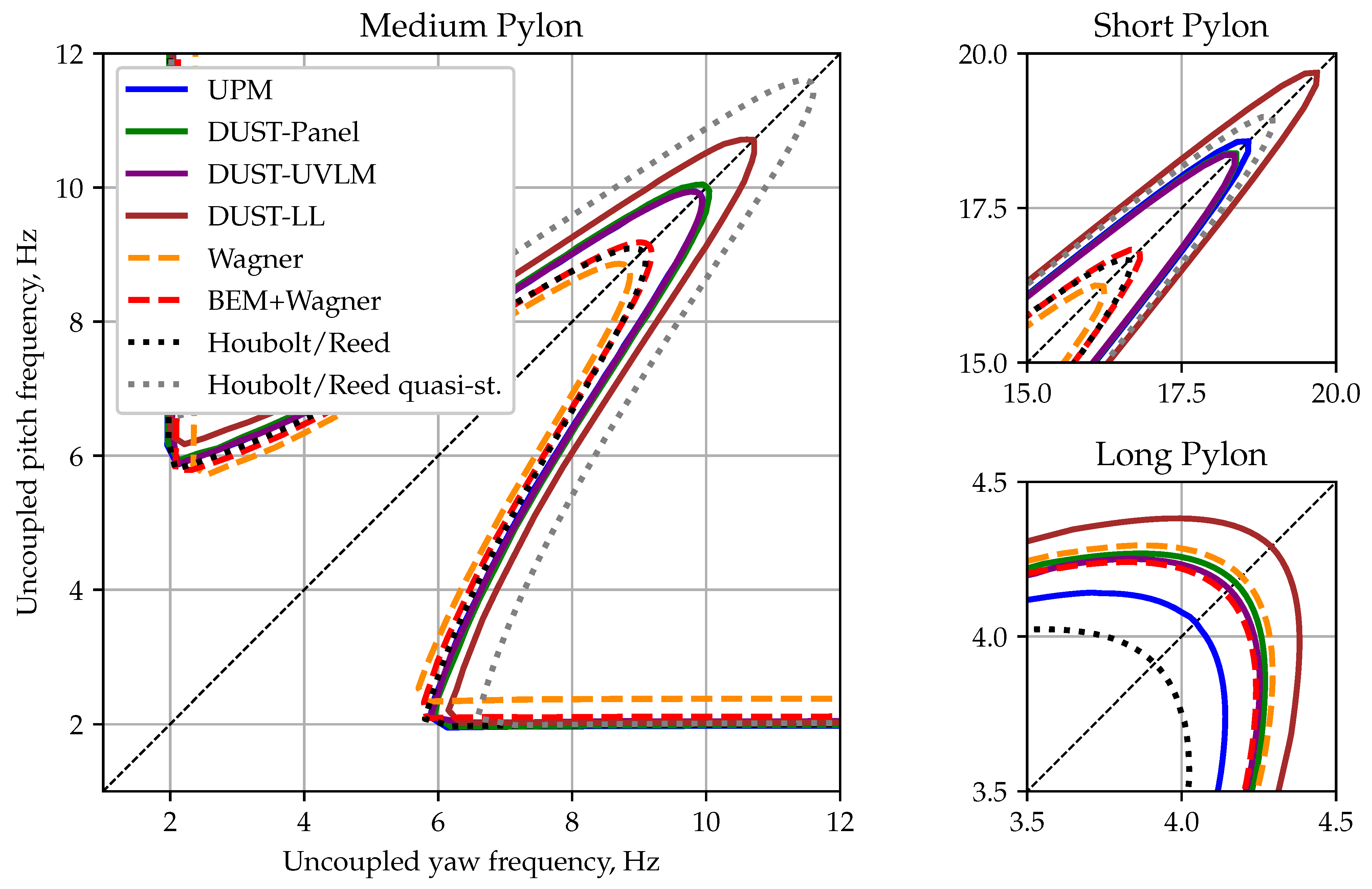
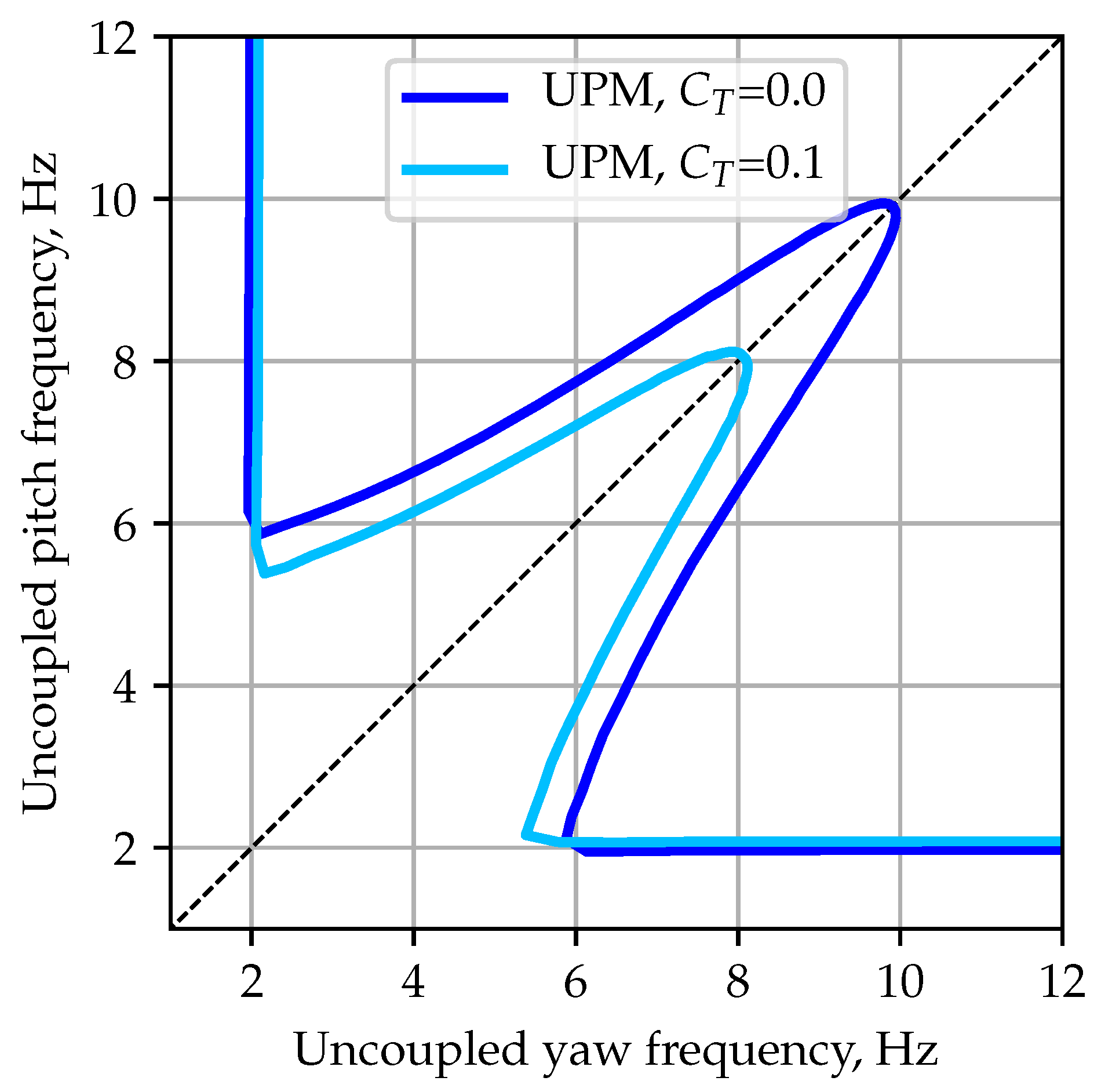
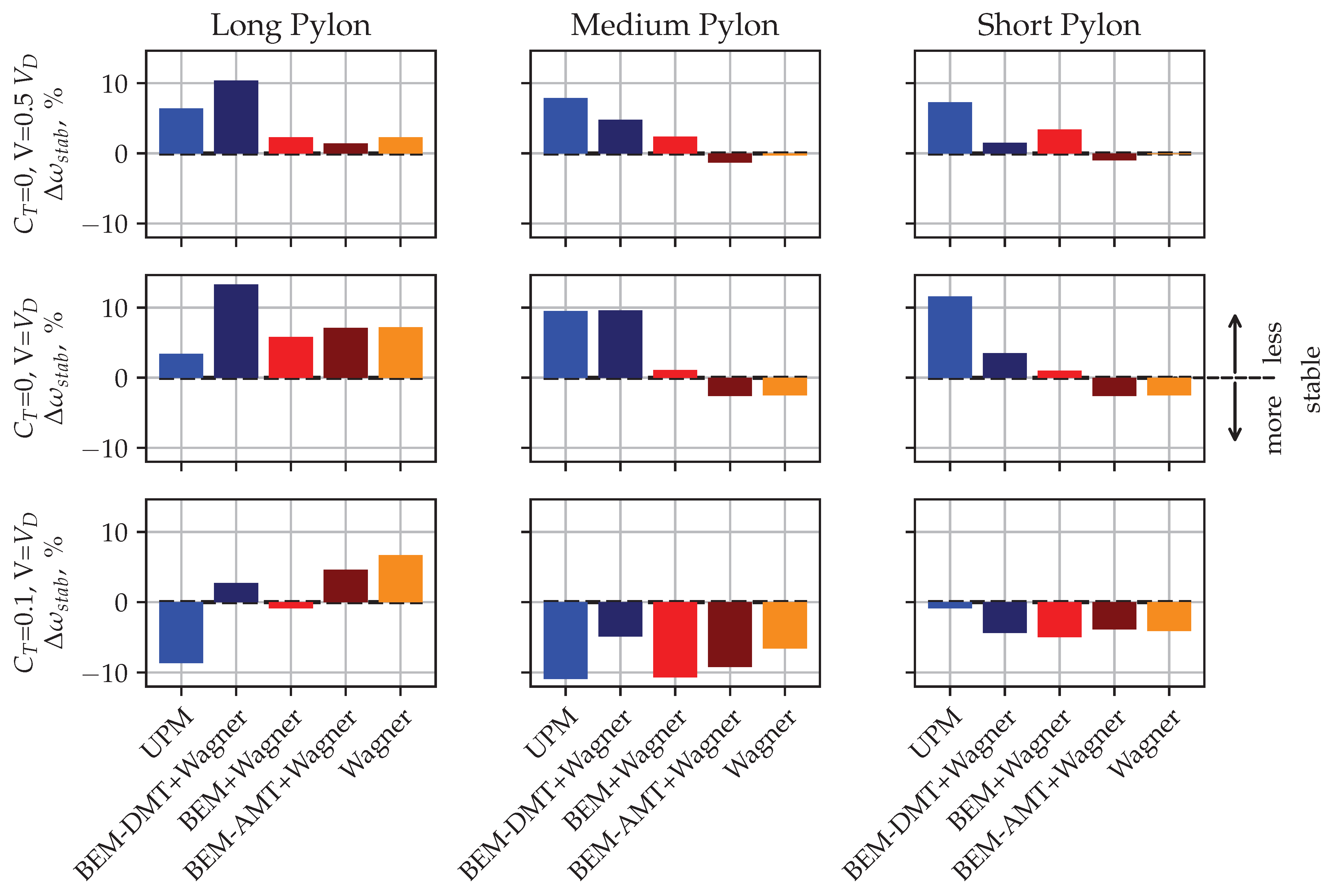
3.4. Stability
4. Discussion
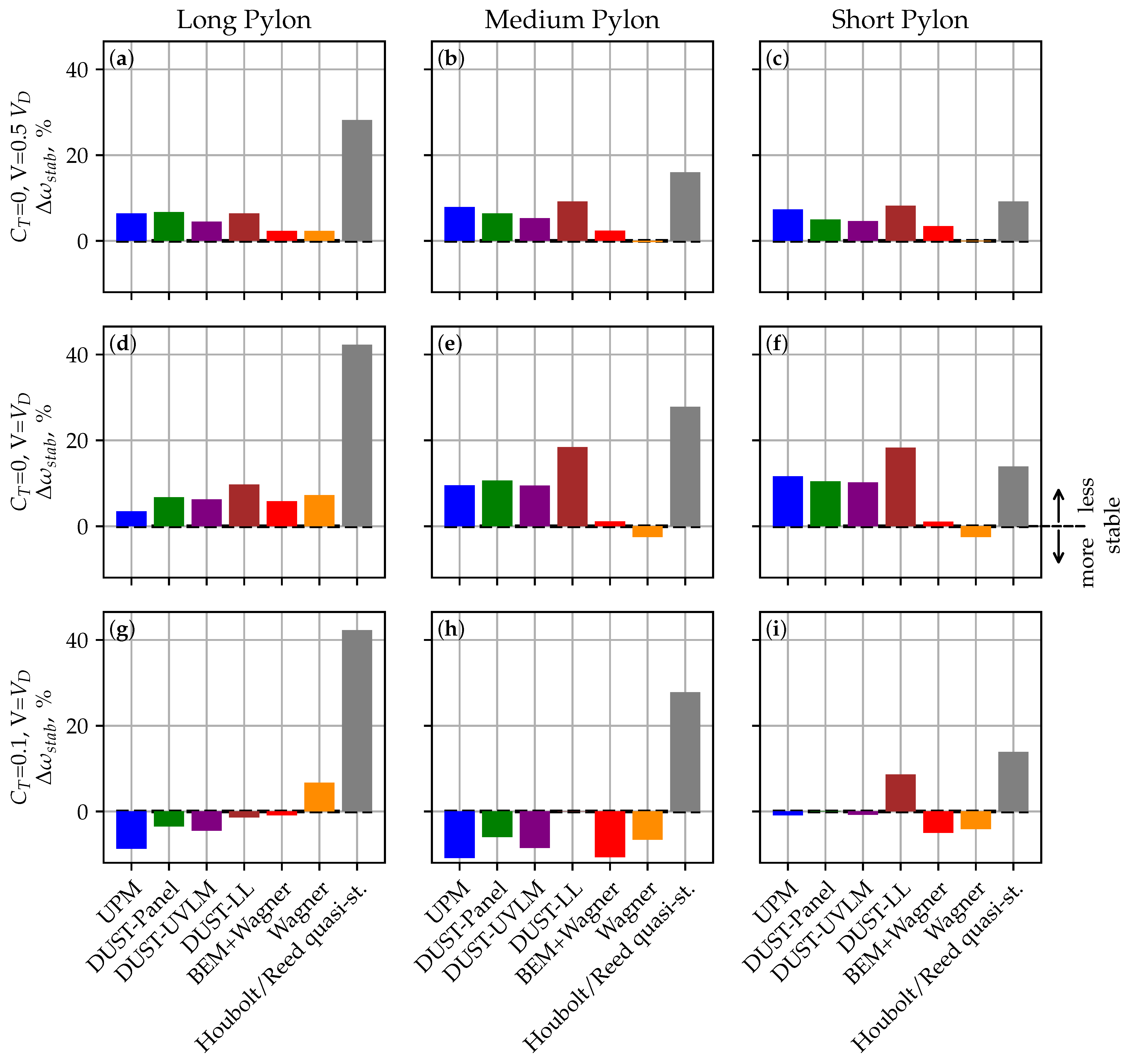
- Clear trends are visible in the unsteady aerodynamic results when comparing different methods. The stability predictions that are based on these results, however, do not necessarily reflect those clear trends. This suggests that stability predictions are not driven by the absolute differences in unsteady aerodynamics but rather by relative deviations in the individual load components. Even slight differences in the prediction of one load component can drastically impact stability predictions. Great care, therefore, needs to be exercised in the modeling of real aircraft propellers and as few assumptions as possible should be made regarding method, geometry and aerodynamic characteristics.
- For all configurations investigated, the Houbolt/Reed method yields the more stable (and thus less conservative) whirl flutter predictions for zero thrust than the mid-fidelity methods. If the Houbolt/Reed method is applied in its quasi-steady form (without Theodorsen correction), it results in the most unstable system, but unsteady aerodynamic predictions are far away from the other methods investigated in this comparison. Despite yielding the least conservative stability predictions, the Houbolt/Reed method was used successfully for the design and certification of several propeller aircraft in the past. This fact could be explained by conservatism in the designs or other stabilizing effects (such as blade elasticity) offsetting the destabilizing effect found. Further research is necessary to compare to experimental data or high-fidelity numerical test cases without the assumptions used in this study to identify the correct modeling approach.
- The stability predictions for systems with thrust are all more stable than the zero-thrust operating points, which confirms previous studies in the literature. The stabilizing effect can mainly be associated with the tilting torque vector. Although not checked in this study, this effect probably extends into the region of negative thrust/torque, which is believed to have a destabilizing effect and could thus be important for concepts that use propellers in conjunction with recuperation, as negative torque might destabilize the system.
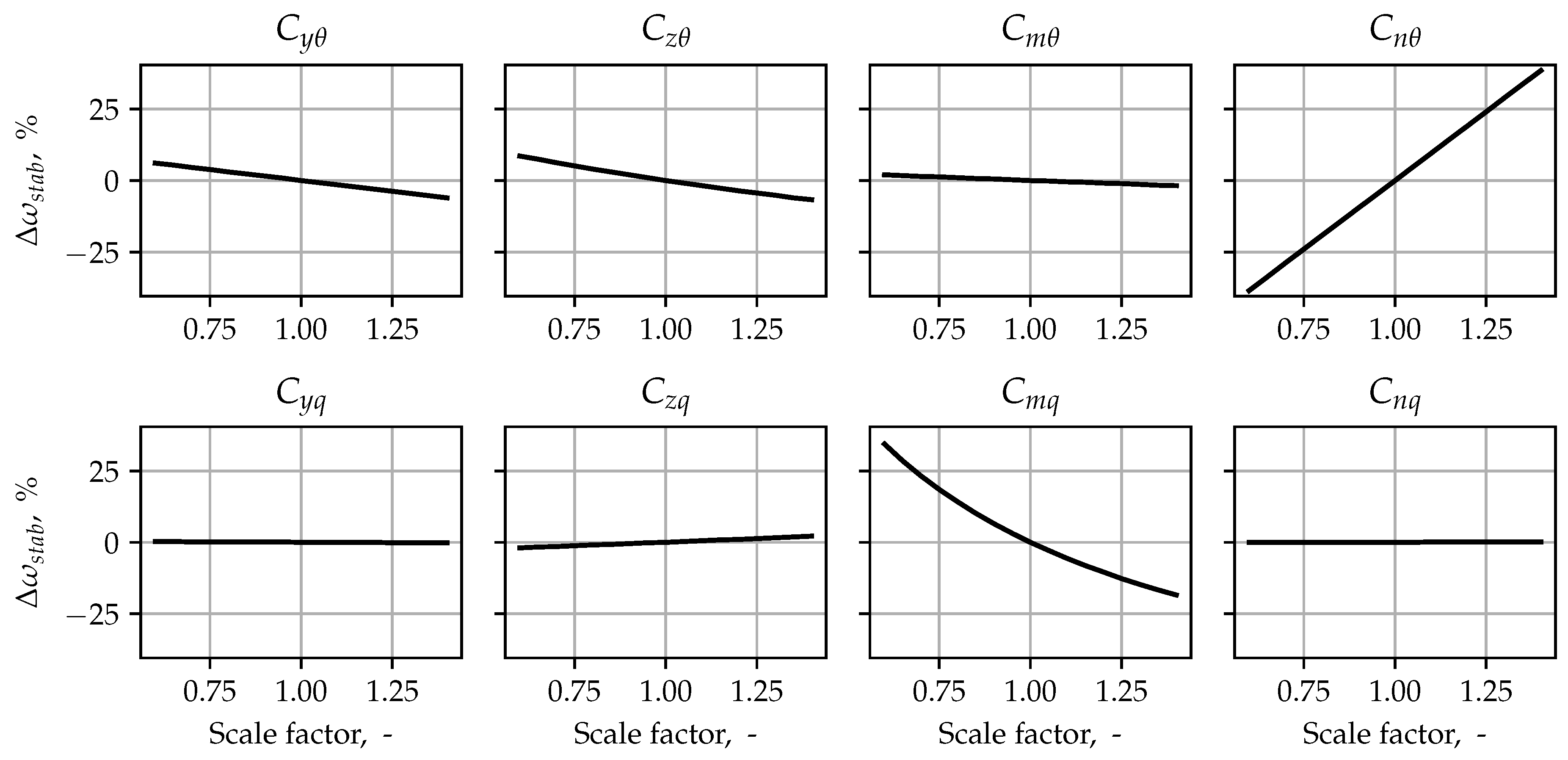
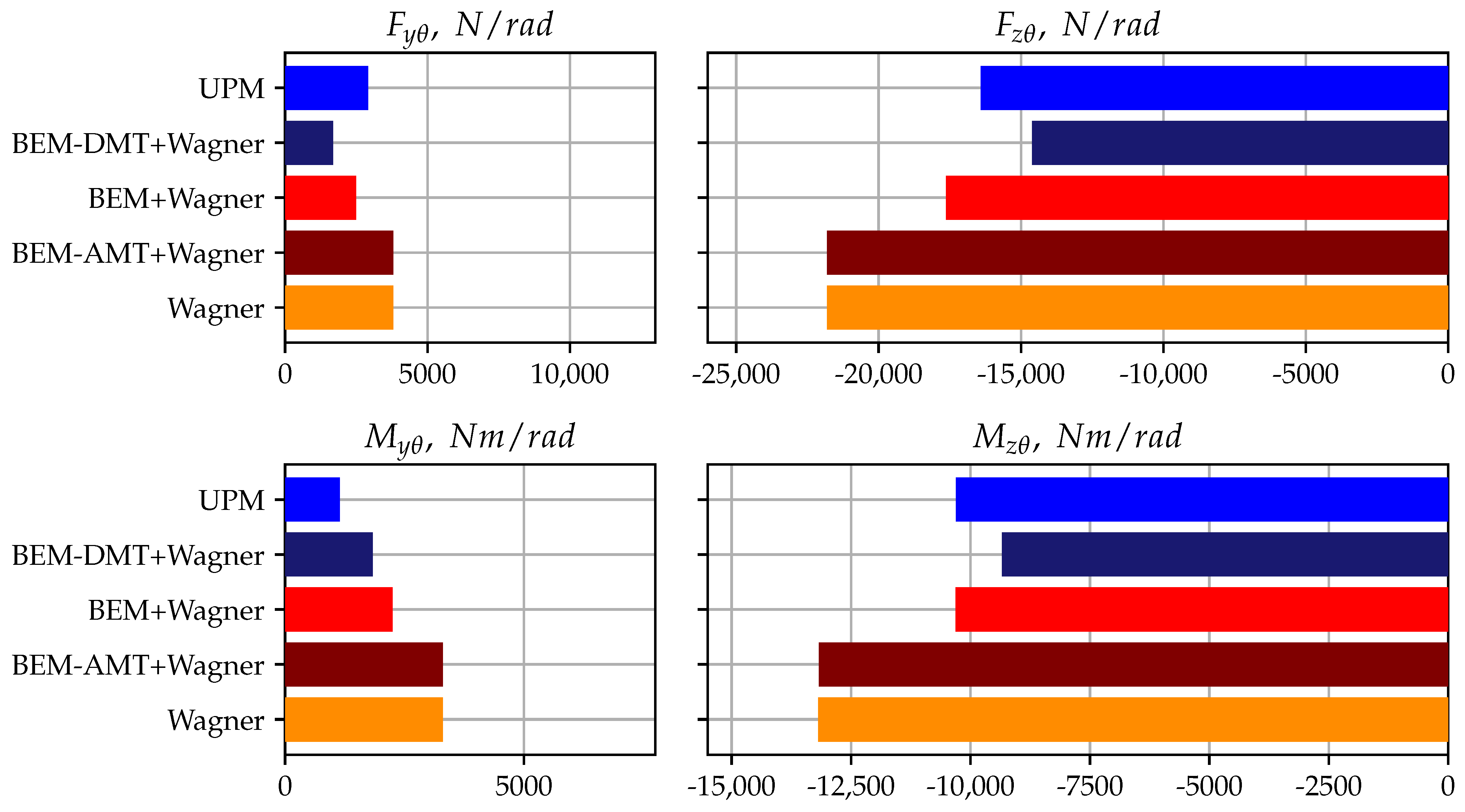
- To analyze the reasons for a variation in whirl flutter predictions when changing parameters, it is not sufficient to look at individual hub load components (e.g., only into the destabilizing term, ). Changes in several components may cancel each other out, as some load components (or derivatives in the linearized approach) have a stabilizing and others a destabilizing effect. For the same reason, as results of the Wagner method demonstrated, general over- or under-prediction of unsteady aerodynamic loads does not necessarily result in large changes in whirl flutter stability.
- The transfer matrix method gives valuable insights into the unsteady aerodynamics of propellers, as it allows for an assessment of the change in individual hub load components with frequency and among different methods. This frequency dependency can then be transferred to frequency-domain flutter analysis, giving a proper unsteady representation of the propeller in the (whirl) flutter analysis process of, e.g., turboprop aircraft.
- Regarding the comparison of individual aerodynamic methods, the different mid-fidelity methods showed in general good agreement in unsteady aerodynamic and stability predictions. Among the low-fidelity methods, the BEM+Wagner method was, in most cases, the closest one to the mid-fidelity methods regarding unsteady aerodynamics. Regarding stability, it could give the same trends but had larger quantitative differences from the mid-fidelity methods.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BEM | Blade element momentum theory |
| DLM | Doublet lattice method |
| LL | Lifting Line |
| TM-method | Transfer matrix method |
| ROM | Reduced-order model |
| UPM | Unsteady panel method |
| a | Distance between propeller pivot point and disc |
| Aspect ratio | |
| c | Chord |
| Houbolt/Reed derivative from motion b to load term a | |
| Lift curve slope | |
| Thrust coefficient, | |
| Aerodynamic damping matrix | |
| Generalized damping matrix | |
| Loads vector at propeller hub | |
| Transfer function from motion b to force term a | |
| Force in c | |
| Generalized gyroscopic matrix | |
| Frequency-dependent complex transfer matrix | |
| Second moment of inertia around a | |
| J | Advance ratio |
| k | Reduced frequency |
| Rotatory stiffness constant in a | |
| Aerodynamic stiffness matrix | |
| Generalized stiffness matrix | |
| Mach number | |
| Transfer function from motion b to moment term a | |
| Moment in c | |
| Generalized mass matrix | |
| Vector of generalized degrees of freedom | |
| R | Propeller radius |
| s | Laplace operator |
| V | Airspeed |
| Displacement vector at propeller hub | |
| y | Propeller disc displacement in y |
| z | Propeller disc displacement in z |
| Rotational speed of propeller | |
| Angular frequency | |
| Non-dimensional change in required uncoupled pylon stiffness; see Equation (10) | |
| Propeller disc yaw (rotation about z-axis) | |
| Modal matrix | |
| Air density | |
| Propeller disc pitch (rotation about y-axis) |
Appendix A. Transfer Function Linearization

Appendix B. Influence of Thrust and Torque


Appendix C. Comparison of BEM Methods


References
- Reed, W.H. Propeller-rotor whirl flutter: A state-of-the-art review. J. Sound Vib. 1966, 4, 526–544. [Google Scholar] [CrossRef]
- Kunz, D.L. Analysis of Proprotor Whirl Flutter: Review and Update. J. Aircr. 2005, 42, 172–178. [Google Scholar] [CrossRef]
- Hrycko, G. Design Of The Low Vibration Turboprop Powerplant Suspension System for The DASH 7 Aircraft. SAE Trans. 1983, 92, 133–145. [Google Scholar]
- Cecrdle, J. Whirl flutter-related certification according to FAR/CS 23 and 25 regulation standards. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics (IFASD), Savannah, GA, USA, 10–13 June 2019. [Google Scholar]
- Houbolt, J.C.; Reed, W.H., III. Propeller-nacelle whirl flutter. J. Aerosp. Sci. 1962, 29, 333–346. [Google Scholar] [CrossRef]
- Donham, R.; Watts, G. Lessons learned from fixed and rotary wing dynamic and aeroelastic encounters. In Proceedings of the 41st Structures, Structural Dynamics, and Materials Conference and Exhibit, Atlanta, GA, USA, 3–6 April 2000. [Google Scholar] [CrossRef]
- Ribner, H.S. Propellers in Yaw; NACA Wartime Report 3L09; NACA: Langley Field, VA, USA, 1943. [Google Scholar]
- Bland, S.R.; Bennett, R.M. Wind-Tunnel Measurements of Propeller Whirl-Flutter Speeds and Static-Stability Derivatives and Comparison with Theory; NASA Technical Note NASA TN D-1807; NASA Langley Station: Hampton, VA, USA, 1963.
- Rodden, W.; Rose, T. Propeller/nacelle whirl flutter addition to MSC/Nastran. In Proceedings of the 1989 MSC World User’s Conference, Anaheim, CA, USA, 26–27 January 1989. [Google Scholar]
- Cecrdle, J. Analysis of Twin Turboprop Aircraft Whirl-Flutter Stability Boundaries. J. Aircr. 2012, 49, 1718–1725. [Google Scholar] [CrossRef]
- Cecrdle, J. Whirl Flutter of Turboprop Aircraft Structures; Elsevier: Amsterdam, The Netherlands, 2015; ISBN 978-1-78242-185-6. [Google Scholar] [CrossRef]
- Koch, C. Parametric whirl flutter study using different modelling approaches. CEAS Aeronaut. J. 2021, 13, 57–67. [Google Scholar] [CrossRef]
- Böhnisch, N.; Braun, C.; Koschel, S.; Muscarello, V.; Marzocca, P. Dynamic aeroelasticitiy of wings with distributed propulsion systems featuring a large tip propeller. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics (IFASD), Madrid, Spain, 13–17 June 2022. [Google Scholar]
- Böhnisch, N.; Braun, C.; Muscarello, V.; Marzocca, P. A Sensitivity Study on Aeroelastic Instabilities of Slender Wings with a Large Propeller. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar] [CrossRef]
- Koch, C.; Koert, B. Including Blade Elasticity into Frequency-Domain Propeller Whirl Flutter Analysis. J. Aircr. 2023; in press. [Google Scholar] [CrossRef]
- Smith, H.R. Engineering Models of Aircraft Propellers at Incidence. Ph.D. Thesis, University of Glasgow, Glasgow, UK, 2015. [Google Scholar]
- Fei, X.; Litherland, B.L.; German, B.J. Development of an Unsteady Vortex Lattice Method to Model Propellers at Incidence. AIAA J. 2021, 60, 176–188. [Google Scholar] [CrossRef]
- Ortun, B.; Boisard, R.; Martino, I.G. Assessment of propeller 1P loads predictions. Int. J. Eng. Syst. Model. Simul. 2012, 4, 36–46. [Google Scholar] [CrossRef]
- Bousquet, J.M.; Gardarein, P. Improvements on computations of high speed propeller unsteady aerodynamics. Aerosp. Sci. Technol. 2003, 7, 465–472. [Google Scholar] [CrossRef]
- Hoover, C.B.; Shen, J. Parametric Study of Propeller Whirl Flutter Stability with Full-Span Model of X-57 Maxwell Aircraft. J. Aircr. 2018, 55, 2530–2537. [Google Scholar] [CrossRef]
- Hoover, C.B.; Shen, J. Fundamental understanding of propeller whirl flutter through multibody dynamics. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Cocco, A. Comprehensive Mid-Fidelity Simulation Environment for Aeroelastic Stability Analysis of Tiltrotors with Pilot-in-the-Loop. Ph.D. Thesis, Politecnio di Milano, Milan, Italy, 2022. [Google Scholar]
- Corle, E.; Floros, M.; Schmitz, S. On the Influence of Inflow Model Selection for Time-Domain Tiltrotor Aeroelastic Analysis. J. Am. Helicopter Soc. 2021, 66, 1–12. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, P. Whirl flutter analysis with propeller aerodynamic derivatives computed by unsteady vortex lattice method. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Gennaretti, M.; Greco, L. Whirl flutter analysis of prop-rotors using unsteady aerodynamics reduced-order models. Aeronaut. J. 2008, 112, 261–270. [Google Scholar] [CrossRef]
- Koch, C. Whirl flutter stability assessment using rotor transfer matrices. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics (IFASD), Madrid, Spain, 13–17 June 2022. [Google Scholar]
- Gori, R.; Serafini, J.; Molica Colella, M.; Gennaretti, M. Assessment of a state-space aeroelastic rotor model for rotorcraft flight dynamics. CEAS Aeronaut. J. 2016, 7, 405–418. [Google Scholar] [CrossRef]
- Cecrdle, J. Influence of propeller blade lift distribution on whirl flutter stability characteristics. Int. J. Aerosp. Mech. Eng. 2014, 8, 727–733. [Google Scholar]
- Kunze, P. Evaluation of an unsteady panel method for the prediction of rotor-rotor and rotor-bodyinteractions in preliminary design. In Proceedings of the 41st European Rotorcraft Forum 2015, (ER), Munich, Germany, 1–4 September 2015; Volume 1, pp. 473–485. [Google Scholar]
- Yin, J.; Ahmed, S. Helicopter main-rotor/tail-rotor interaction. J. Am. Helicopter Soc. 2000, 45, 293–302. [Google Scholar] [CrossRef]
- Yin, J.; Van Der Wall, B.; Wilke, G. Rotor aerodynamic and noise under influence of elastic blade motion and different fuselage modeling. In Proceedings of the 40th European Rotorcraft Forum 2014, Southampton, UK, 2–5 September 2014; Volume 1, pp. 475–495. [Google Scholar]
- Tugnoli, M.; Montagnani, D.; Syal, M.; Droandi, G.; Zanotti, A. Mid-fidelity approach to aerodynamic simulations of unconventional VTOL aircraft configurations. Aerosp. Sci. Technol. 2021, 115, 106804. [Google Scholar] [CrossRef]
- Zanotti, A.; Savino, A.; Palazzi, M.; Tugnoli, M.; Muscarello, V. Assessment of a Mid-Fidelity Numerical Approach for the Investigation of Tiltrotor Aerodynamics. Appl. Sci. 2021, 11, 3385. [Google Scholar] [CrossRef]
- Arnold, J.; Waitz, S. Using Multibody Dynamics for the Stability Assessment of a New Double-Swept Rotor Blade Setup. In Proceedings of the ERF 2018—44th European Rotorcraft Forum, Delft, The Netherlands, 18–21 September 2018. [Google Scholar]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook, 2nd ed.; Wiley: Chichester, UK, 2011. [Google Scholar]
- Verdonck, H.; Hach, O.; Polman, J.D.; Braun, O.; Balzani, C.; Müller, S.; Rieke, J. An open-source framework for the uncertainty quantification of aeroelastic wind turbine simulation tools. J. Phys. Conf. Ser. 2022, 2265, 042039. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Blade Lift Method | Wake Method | Tip Loss | Comp. Time |
|---|---|---|---|---|
| UPM [29,30,31] | 2D vortex lattice on camber surface + 3D source/sink panels on blade surface | Free panel wake | Included in free wake | Hours |
| DUST-Panel [32,33] | 3D doublet and source panels on blade surface | Free vortex particle wake | Included in free wake | Hours |
| DUST-UVLM [32,33] | 2D vortex lattice on camber surface | Free vortex particle wake | Included in free wake | Hours |
| DUST-LL [32,33] | 1D lifting line using airfoil polars | Free vortex particle wake | Included in free wake | Minutes–Hours |
| BEM+Wagner | Strip theory using airfoil polars + Wagner’s function for unsteady lift lag [34] | Weighted blade element momentum theory [16,35] | Prandtl–Glauert | Minutes |
| Wagner | Strip theory using airfoil polars + Wagner’s function for unsteady lift lag [34] | No induced velocity model | No tip loss model | Seconds |
| Quasi-steady | Strip theory using airfoil polars | No induced velocity model | No tip loss model | Seconds |
| Houbolt/Reed | Linearized strip theory ( only) + Theodorsen’s function for unsteady lift lag | No induced velocity model | Aspect ratio correction | Seconds |
| Houbolt/Reed quasi-steady | Linearized strip theory ( only) | No induced velocity model | Aspect ratio correction | Seconds |
| Property | Symbol | Value |
|---|---|---|
| Pitch/yaw inertia | / | |
| Total polar inertia of rotating parts | ||
| Pitch stiffness | ||
| Yaw stiffness | ||
| Pylon length | a | 0.425, 0.85 and 1.7 |
| Name | Airspeed | Shaft Speed | Advance Ratio | Thrust Coefficient | Air Density |
|---|---|---|---|---|---|
| (V, m s−1) | (, rpm) | (J, -) | (, -) | (, kg m) | |
| 142 | 1600 | 2.13 | 0.0 | 1.225 | |
| 142 | 1600 | 2.13 | 0.1 | 1.225 | |
| 71 | 1600 | 1.07 | 0.0 | 1.225 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koch, C.; Böhnisch, N.; Verdonck, H.; Hach, O.; Braun, C. Comparison of Unsteady Low- and Mid-Fidelity Propeller Aerodynamic Methods for Whirl Flutter Applications. Appl. Sci. 2024, 14, 850. https://doi.org/10.3390/app14020850
Koch C, Böhnisch N, Verdonck H, Hach O, Braun C. Comparison of Unsteady Low- and Mid-Fidelity Propeller Aerodynamic Methods for Whirl Flutter Applications. Applied Sciences. 2024; 14(2):850. https://doi.org/10.3390/app14020850
Chicago/Turabian StyleKoch, Christopher, Nils Böhnisch, Hendrik Verdonck, Oliver Hach, and Carsten Braun. 2024. "Comparison of Unsteady Low- and Mid-Fidelity Propeller Aerodynamic Methods for Whirl Flutter Applications" Applied Sciences 14, no. 2: 850. https://doi.org/10.3390/app14020850