
An Experimental Investigation of Various Control Systems for an Archimedes Screw Turbine in a Micro-Hydropower Plant


Abstract
:1. Introduction
- (i)
- Studies related to the parameters affecting the performance of an . Dellinger et al. [22] studied the influence of the tilt angle and the number of blades of an Archimedes screw turbine on the power output and performance using computational fluid dynamics simulation and laboratory tests. The results showed good agreement between the model and experiment, with relative errors in hydraulic efficiency of less than in optimal cases. Shahverdi et al. [23] evaluated the performance of at different rotational speeds, flow rates, and tilt angles using computational fluid dynamics. Dedic et al. [24] experimentally analysed the influence of variations in tilt angle, water flow, and rotational speed on the performance of an . Ref. [23] investigated the effect of several parameters (the number of blades, the tilt angle, the pitch angle, the screw’s outer diameter, the rotation speed, the head, and the flow rate) on the efficiency of , using computational fluid dynamics.
- (ii)
- Studies related to the control system. There are few studies that analyse the control of Archimedes screws. Lavrič et al. [25] developed several simulation models for small hydropower plant system using constant speed and variable speed generator operation modes, as well as a combination of equipment models based on manufacturer data, in situ measurements, and published data. The control system used is not mentioned in this work. Notwithstanding, there are no studies dedicated to the analysis of control systems in actual operating scenarios. To the best of the authors’ knowledge, no research has been performed concerning the energy analysis of operating under different control modes.
- (i)
- An analysis to determine the control system that maximises electricity production;
- (ii)
- An analysis to determine the control system that maximises the efficiency of the micro-hydropower plant;
- (iii)
- An analysis to determine the control system that reduces mechanical stress on the gearbox;
- (iv)
- The actual micro-hydropower plant measurements. The measurements collected in this study are derived from a micro-hydropower plant. Unlike previous studies that primarily focused on examining test models, this research investigates actual operational scenarios. While studying test models offers valuable insights into system performance, certain phenomena specific to real-world cases may not be captured through such research.
2. The Overall Structure of the Control System
2.1. Control Methods
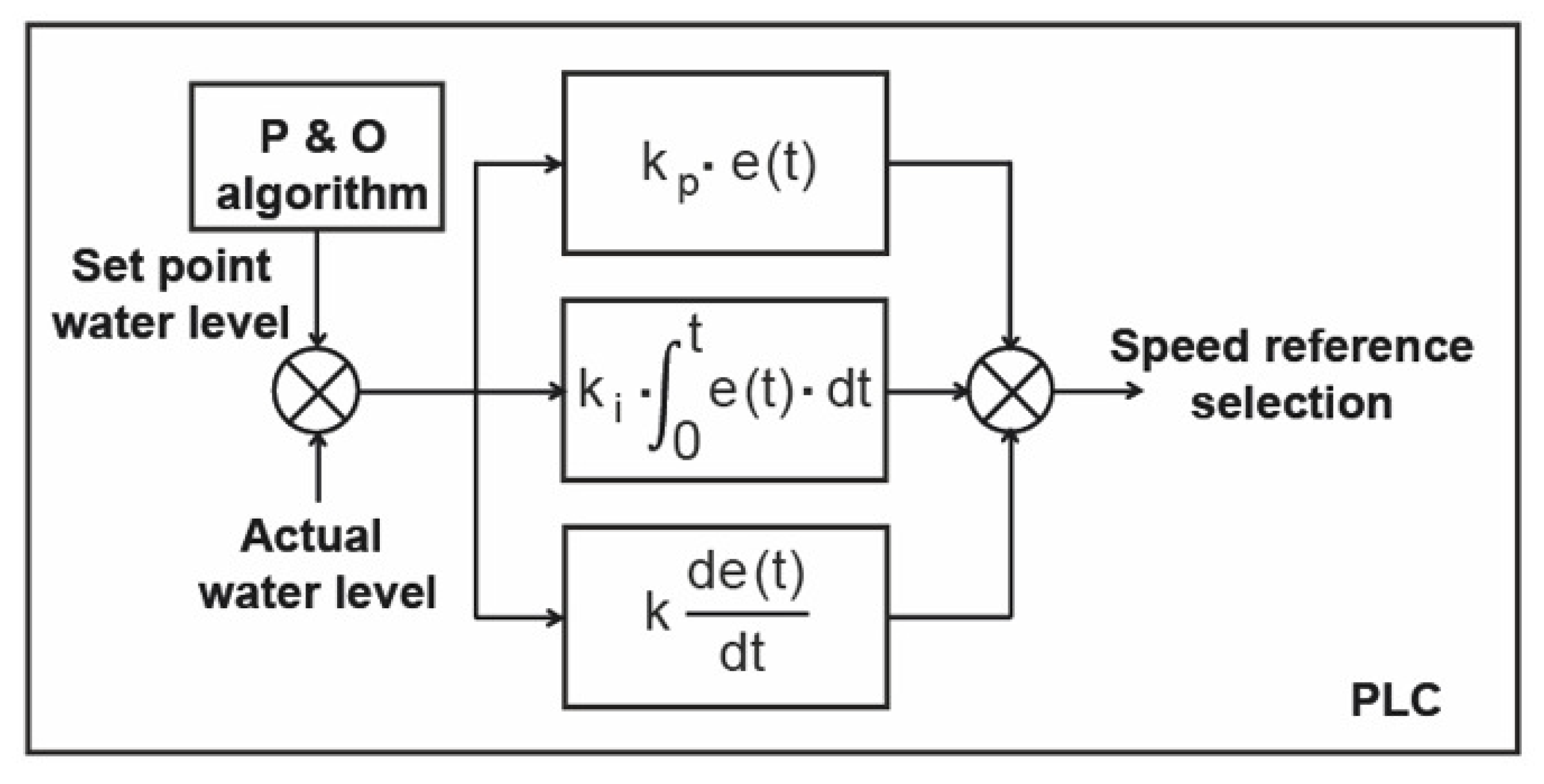
2.1.1. Water Level Control (WLC)
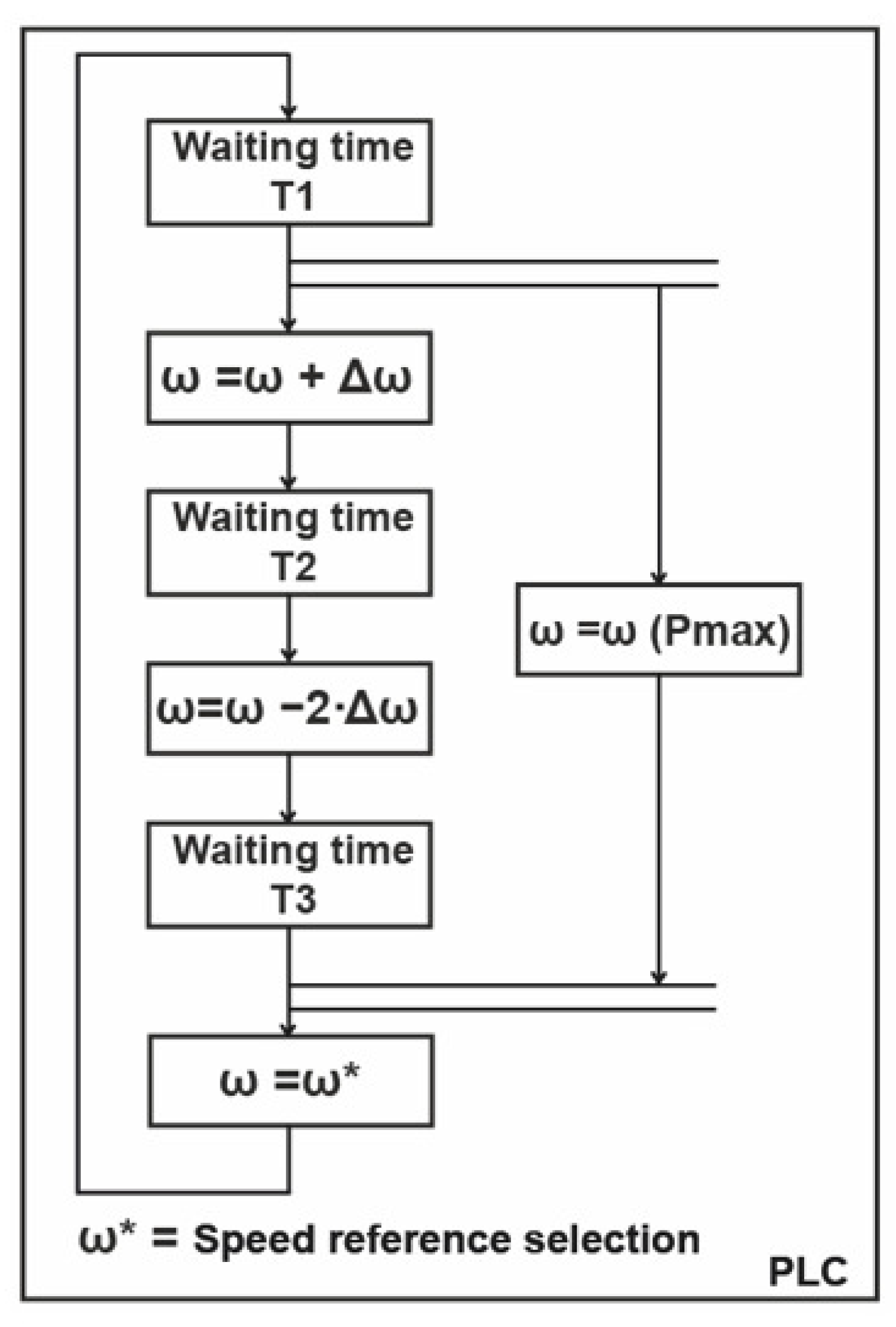
2.1.2. A Maximum Power Point Tracking (MPPT) Method
2.1.3. Optimal Water Level Control (OWLC)
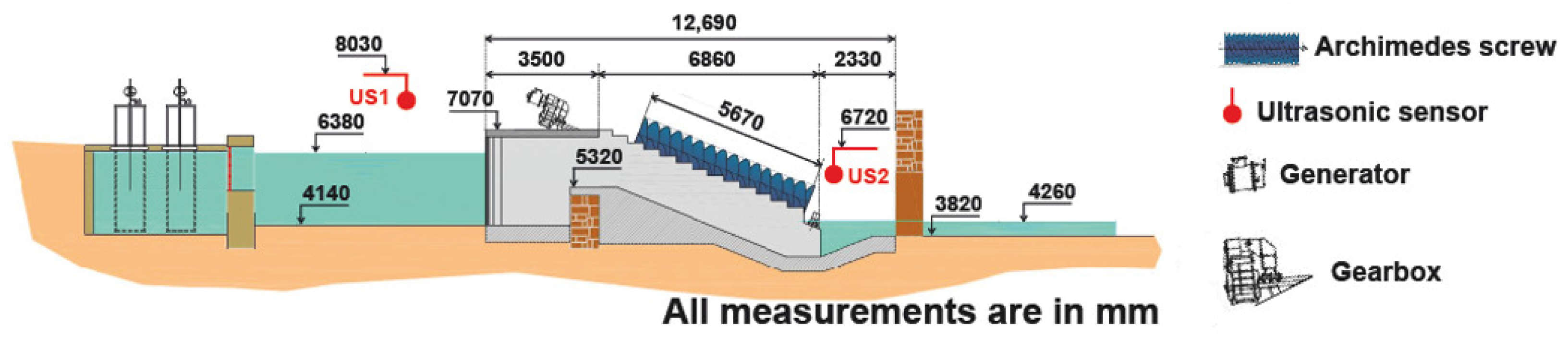
3. Case Study
4. Experimental Setup
4.1. Speed
4.2. Power Output
4.3. Water Head
4.4. Flow Rate
4.5. Uncertainty Analysis
5. Assessment Indicators
5.1. Energy Gain
5.2. Micro-Hydropower Plant Efficiency
5.3. Gearbox Fatigue
6. Results and Discussion
- (i)
- The tests were carried out under real hydrological conditions at the Barreda micro-hydropower plant;
- (ii)
- The test duration for each control system was 4 h;
- (iii)
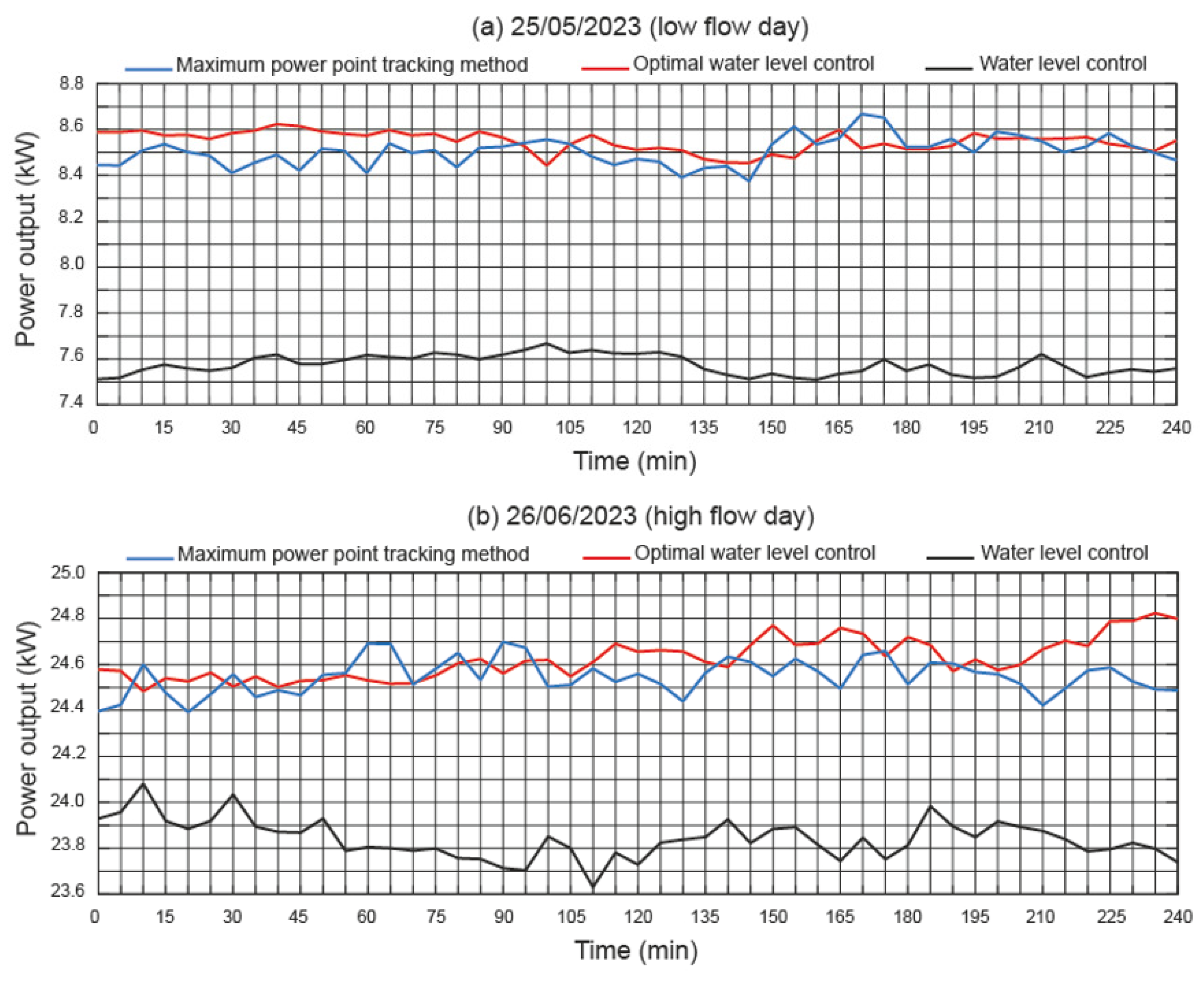
- The tests were carried out over several days of operation of the micro hydroelectric power plant. As the flow rate varies throughout the day, two days have been chosen in which the flow rate remained almost constant, and days from the test campaign, where the flow rate had larger variations, have been discarded. A low flow day (25 May 2023) and a high flow day (26 June 2023) were chosen.
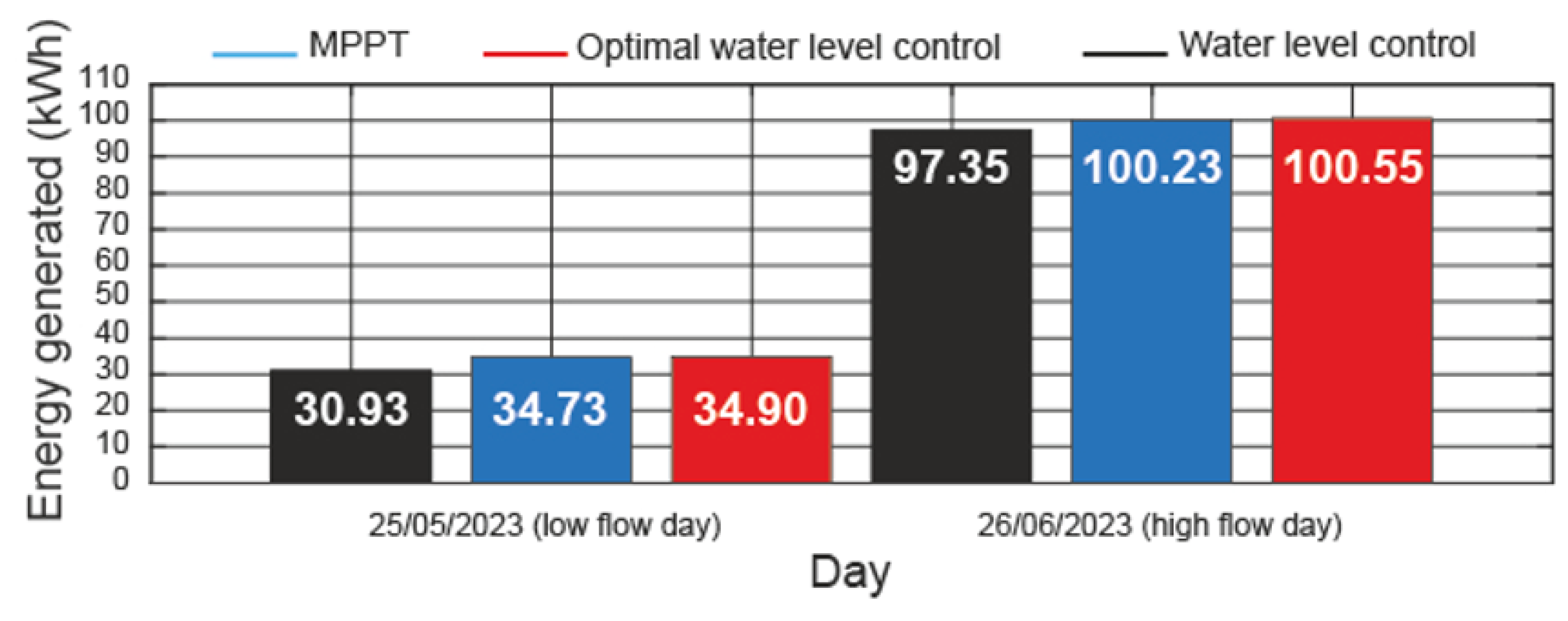
6.1. Electricity Production
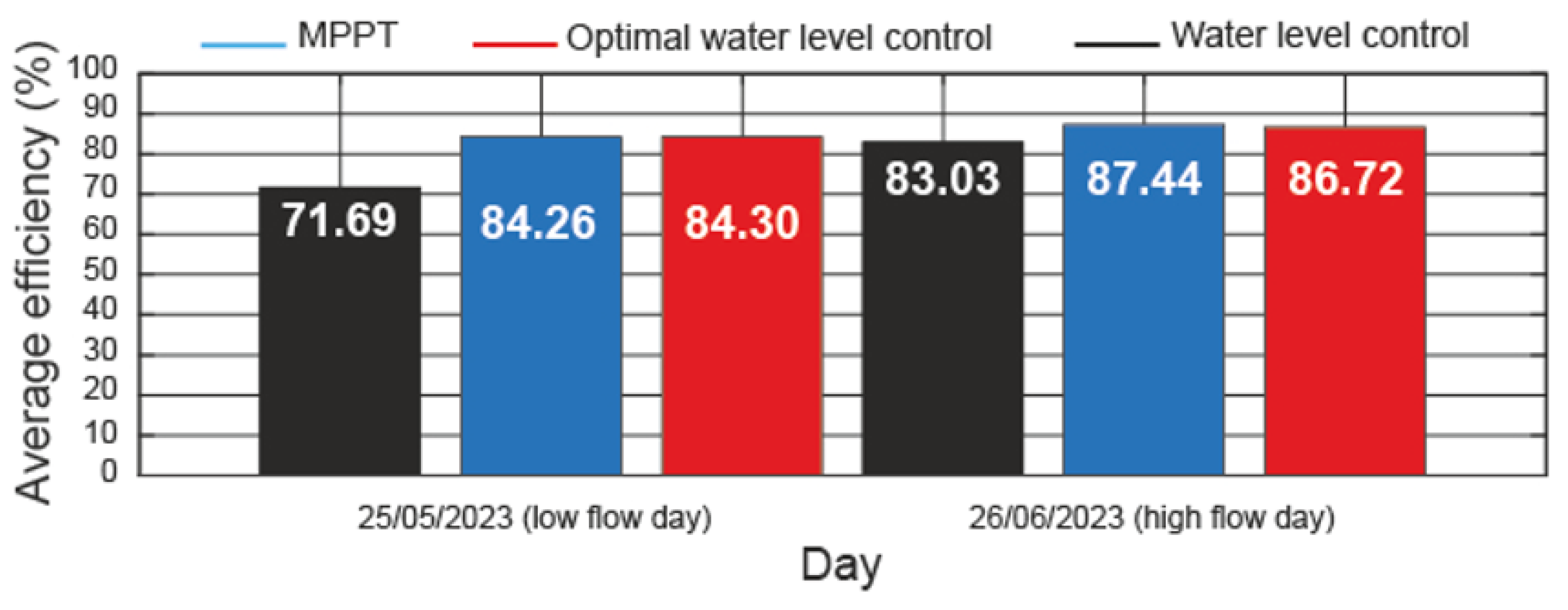
6.2. Micro-Hydropower Plant Efficiency
6.3. Gearbox Fatigue
7. Conclusions
- (i)
- The optimal water level control system and the maximum power point tracking system achieve similar levels of electrical production. The energy gain obtained is less than . In contrast, the water level control system obtains the worst results; in fact, the energy gain is around for low flow rates and for high flow rates.
- (ii)
- The efficiency of the micro-hydropower plant is similar with the implementation of the optimal water level control system and the maximum power point tracking system, regardless of the available flow. The average efficiency gain is less than . On the contrary, the water level control system obtains the worst results; specifically, the average efficiency gain is around for low flows and for high flows.
- (iii)
- The optimal water level control system reduces mechanical stress on the gearbox and therefore allows for a significant reduction in fatigue load rates compared to the maximum power point tracking system. The maximum power point tracking system produces times more mechanical stress on the gearbox than the optimal water level control system for low flow rates, and times more for high flow rates. When compared to the water level control system, these amounts are 10 times higher and 5 times higher for low flow rates and high flow rates, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Average efficiency (dimensionless) | |
| Average efficiency gain (dimensionless) | |
| b | Face width (m) |
| d | Pitch diameter (m) |
| E | Electrical energy (kWh) |
| Energy gain (dimensionless) | |
| Transmitted load (N) | |
| g | Acceleration of gravity (m/s) |
| Available head (m) | |
| L | Total length of screw (m) |
| m | Module (m) |
| N | Number of blades (dimensionless) |
| Power output of the electric generator (W) | |
| Power output of the electric generator (W) | |
| Hydraulic power (W) | |
| Mechanical power (W) | |
| p | Pitch of one blade (m) |
| Radius of screw’s inner cylinder (m) | |
| Radius of screw’s outer cylinder (m) | |
| q | Flow rate (m/s) |
| T | Torque (Nm) |
| Y | Lewis form factor (dimensionless) |
| Angle of the screw turbine () | |
| Micro-hydropower plant efficiency (%) | |
| Electric generator efficiency (%) | |
| Gearbox efficiency (%) | |
| efficiency (%) | |
| Water density (kg/m) | |
| Rotational speed (rad/s) | |
| Stress (kg/m) | |
| Critical cavitation factor (dimensionless) |
References
- BP Statistical Review of World Energy, 72nd ed.; BP: London, UK, 2023; Available online: https://www.energyinst.org/statistical-review (accessed on 22 October 2023).
- BPIE. 9 Ways to Make the Energy Performance of Buildings Directive More Effective. 2016. Available online: http://bpie.eu/wp-content/uploads/2016/08/EPBD-paper_Eng.pdf (accessed on 20 October 2023).
- Barbón, A.; Aparicio-Bermejo, J.; Bayón, L.; Georgious, R. Floating photovoltaic systems coupled with pumped hydroplants under day-Ahead electricity market conditions: Parametric analysis. Electronics 2023, 12, 2250. [Google Scholar] [CrossRef]
- IRENA. Global Energy Transformation: A Roadmap to 2050. Available online: https://www.irena.org/publications/2019/Apr/Global-energy-transformation-A-roadmap-to-2050-2019Edition (accessed on 20 October 2023).
- World Bank. Climate Change Action Plan 2021–2025: Supporting Green, Resilient and Inclusive Development; World Bank: Washington, DC, USA, 2021; p. 21. [Google Scholar]
- Reddy, V.R.; Uitto, J.I.; Frans, D.R.; Matin, N. Achieving global environmental benefits through local development of clean energy? The case of small hilly hydel in India. Energy Policy 2006, 34, 4069–4080. [Google Scholar] [CrossRef]
- Xu, J.; Ni, T.; Zheng, B. Hydropower development trends from a technological paradigm perspective. Energy Convers. Manag. 2015, 90, 195–206. [Google Scholar] [CrossRef]
- UNIDO; ICSHP. World Small Hydropower Development Report 2022; United Nations Industrial Development Organization: Vienna, Austria; International Center on Small Hydro Power: Hangzhou, China, 2022; Available online: https://www.unido.org/sites/default/files/files/2023-05/ENGLISH%20SUMMARY-2022.pdf (accessed on 20 October 2023).
- Sachdev, H.S.; Akella, A.K.; Kumar, N. Analysis and evaluation of small hydropower plants: A bibliographical survey. Renew. Sustain. Energy Rev. 2015, 51, 1013–1022. [Google Scholar] [CrossRef]
- Punys, P.; Kvaraciejus, A.; Dumbrauskas, A.; Šilinis, L.; Popa, B. An assessment of micro-hydropower potential at historic watermill, weir, and non-powered dam sites in selected EU countries. Renew. Energy 2019, 133, 1108–1123. [Google Scholar] [CrossRef]
- Quaranta, E.; Bahreini, A.; Riasi, A.; Revelli, R. The very low head turbine for hydropower generation in existing hydraulic infrastructures: State of the art and future challenges. Sustain. Energy Technol. Assess. 2022, 51, 101924. [Google Scholar] [CrossRef]
- Zhou, D.; Deng, Z.D. Ultra-low-head hydroelectric technology: A review. Renew. Sustain. Energy Rev. 2017, 78, 23–30. [Google Scholar] [CrossRef]
- RESTOR Hydro Project. 2012. Available online: http://www.restor-hydro.eu/en/ (accessed on 20 October 2023).
- Ball, I.; Berg, L.; Buiting, M.J.; Courret, D.; David, L.; Denis, V.; Dewitte, M.; Henke, A.; Janicki, W.; Siegfried Jawaid, T.; et al. Small Hydropower Technologies—European State-of-the-Art Innovations, HYPOSO 2020. Available online: https://www.hyposo.eu/HYPOSO_Publications/HYPOSO_handbook_final.pdf (accessed on 20 October 2023).
- Doost, A.; Lubitz, W. Archimedes Screw Turbines: A Sustainable Development Solution for Green and Renewable Energy Generation—A Review of Potential and Design Procedures. Sustainability 2020, 12, 7352. [Google Scholar]
- Barbón, A.; González-González, F.; Bayón, L.; Georgious, R. Variable-Speed Operation of Micro-Hydropower Plants in Irrigation Infrastructure: An Energy and Cost Analysis. Appl. Sci. 2023, 13, 13096. [Google Scholar] [CrossRef]
- Williamson, S.; Stark, B.; Booker, J. Low head pico hydro turbine selection using a multi-criteria analysis. Renew. Energy 2014, 61, 43–50. [Google Scholar] [CrossRef]
- Dellinger, G.; Terfous, A.; Garambois, P.A.; Ghenaim, A. Experimental investigation and performance analysis of Archimedes screw generator. J. Hydraul. Res. 2016, 54, 197–209. [Google Scholar] [CrossRef]
- Lubitz, W.; Lyons, M.; Simmons, S. Performance model of Archimedes screw hydro turbines with variable fill level. J. Hydraul. Eng. 2014, 140, 1–11. [Google Scholar] [CrossRef]
- Pipera, A.T.; Rosewarnec, P.J.; Wrightd, R.M.; Kempa, P.S. The impact of an Archimedes screw hydropower turbine on fish migration in a lowland river. Ecol. Eng. 2018, 118, 31–42. [Google Scholar] [CrossRef]
- Rorres, C. The turn of the screw: Optimal desing of an Archimedes crew. J. Hydraul. Eng. 2000, 126, 72–80. [Google Scholar] [CrossRef]
- Dellinger, G.; Simmons, S.; Lubitz, W.D.; Garambois, P.-A.; Dellinger, N. Effect of slope and number of blades on Archimedes screw generator power output. Renew. Energy 2019, 136, 896–908. [Google Scholar] [CrossRef]
- Shahverdi, K.; Loni, R.; Maestre, J.M.; Najafi, G. CFD numerical simulation of Archimedes screw turbine with power output analysis. Ocean Eng. 2021, 231, 108718. [Google Scholar] [CrossRef]
- Dedic-Jandrek, H.; Nizetic, S. Small scale archimedes hydro power plant test station: Design and experimental investigation. J. Clean. Prod. 2019, 231, 756–771. [Google Scholar] [CrossRef]
- Lavrič, H.; Rihar, A.; Fišer, R. Simulation of electrical energy production in Archimedes screw-based ultra-low head small hydropower plant considering environment protection conditions and technical limitations. Energy 2018, 164, 87–98. [Google Scholar] [CrossRef]
- Lavrič, H.; Rihar, A.; Fišer, R. Influence of equipment size and installation height on electricity production in an Archimedes screw-based ultra-low head small hydropower plant and its economic feasibility. Renew. Energy 2019, 142, 468–477. [Google Scholar] [CrossRef]
- Charisiadis, C. An Introductory Presentation to the “Archimedean Screw” as a Low Head Hydropower Generator; Leibniz Univerity Hannover: Hannover, Germany, 2015. [Google Scholar]
- SinFin Energy. Available online: https://www.sinfinenergy.com/en/c-h-rebolluelo/ (accessed on 22 October 2023).
- Bhattacharjee, S.; Nayak, P.K. PV-pumped energy storage option for convalescing performance of hydroelectric station under declining precipitation trend. Renew. Energy 2019, 135, 288–302. [Google Scholar] [CrossRef]
- Zheng, S.; Shahzad, M.; Muhammad Asif, H.; Gao, J.; Abdul Muqeet, H. Advanced optimizer for maximum power point tracking of photovoltaic systems in smart grid: A roadmap towards clean energy technologies. Renew. Energy 2023, 206, 1326–1335. [Google Scholar] [CrossRef]
- Compadre Torrecilla, M.; Montecucco, A.; Siviter, J.; Strain, A.; Knox, A.R. Transient response of a thermoelectric generator to load steps under constant heat flux. Appl. Energy 2018, 212, 293–303. [Google Scholar] [CrossRef]
- Zholtayev, D.; Rubagotti, M.; Duc Do, T. Adaptive super-twisting sliding mode control for maximum power point tracking of PMSG-based wind energy conversion systems. Renew. Energy 2022, 183, 877–889. [Google Scholar] [CrossRef]
- Hoffstaedt, J.P.; Truijen, D.P.K.; Fahlbeck, J.; Gans, L.H.A.; Qudaih, M.; Laguna, A.J.; De Kooning, J.D.M.; Stockman, K.; Nilsson, H.; Storli, P.-T.; et al. Low-head pumped hydro storage: A review of applicable technologies for design, grid integration, control and modelling. Renew. Sustain. Energy Rev. 2022, 158, 112119. [Google Scholar] [CrossRef]
- Belhadji, L.; Bacha, S.; Munteanu, I.; Rumeau, A.; Roye, D. Adaptive MPPT applied to variable-speed microhydropower Plant. IEEE Trans. Energy Convers. 2013, 28, 34–43. [Google Scholar] [CrossRef]
- Leroy-Somer. Available online: https://www.leroy-somer.com/documentation_pdf/3969_en.pdf (accessed on 22 October 2023).
- Nidec. Available online: https://acim.nidec.com (accessed on 22 October 2023).
- Eaton. Available online: https://www.eaton.com (accessed on 22 October 2023).
- Dynapar. Available online: https://www.dynapar.com/technology/encoder_basics/incremental_encoder/ (accessed on 22 October 2023).
- Temper. Available online: https://www.grupotemper.com/producto/kpqa-01 (accessed on 22 October 2023).
- Siemens. Available online: https://mall.industry.siemens.com/mall/es/es/Catalog/Products/10268964 (accessed on 22 October 2023).
- Krohne. Available online: https://krohne.com/en/products/flow-measurement/flowmeters/electromagnetic-flowmeters (accessed on 22 October 2023).
- Yang, M.-H.; Gu, Z.-T.; Yeh, R.-H. Numerical and experimental analyses of the performance of a vertical axis turbine with controllable-blades for ocean current energy. Energy Convers. Manag. 2023, 285, 117009. [Google Scholar] [CrossRef]
- Li, M.; Zhang, Q.; Li, G.; Shao, S. Experimental investigation on performance and heat release analysis of a pilot ignited direct injection natural gas engine. Energy 2015, 90, 1251–1260. [Google Scholar] [CrossRef]
- Rahman, M.M.; Hamada, K.I.; Aziz, A.R.A. Characterization of the timeaveraged overall heat transfer in a direct-injection hydrogen-fueled engine. Int. J. Hydrogen Energy 2013, 38, 4816–4830. [Google Scholar] [CrossRef]
- Al-Waeli, A.H.A.; Chaichan, M.T.; Sopian, K.; Kazem, H.A.; Mahood, H.B.; Khadom, A.A. Modeling and experimental validation of a PVT system using nanofluid coolant and nano-PCM. Sol. Energy 2019, 177, 178–191. [Google Scholar] [CrossRef]
- Barbón, A.; Bayón-Cueli, C.; Bayón, L.; Carreira-Fontao, V. A methodology for an optimal design of ground-mounted photovoltaic power plants. Appl. Energy 2022, 314, 118881. [Google Scholar] [CrossRef]
- Bonaiti, L.; Geitner, M.; Tobie, T.; Gorla, C.; Stahl, K. A comparison between two statistical methods for gear tooth root bending strength estimation starting from pulsator data. Appl. Sci. 2023, 13, 1546. [Google Scholar] [CrossRef]
- Childs, P.R.N. Mechanical Design Engineering Handbook; Butterworth-Heinemann Ltd.: Oxford, UK, 2014. [Google Scholar]
- ISO 6336-1:2019; Calculation of Load Capacity of Spur and Helical Gears. Part 1: Basic Principles, Introduction and General Influence Factors. ISO: Geneva, Switzerland, 2019. Available online: https://www.une.org/ (accessed on 22 October 2023).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hydraulic Turbine | Head (m) | Flow Rate (m/s) |
|---|---|---|
| Pelton | 60–2000 | 0.02–50 |
| Francis | 8–800 | 0.2–1000 |
| Cross-flow | 3–200 | 0.04–12 |
| Kaplan | 2–70 | 0.5–1000 |
| Archimedes screw | 1–9 | 0.25–10 |
| Parameter | Apparatus | Specifications |
|---|---|---|
| speed | Dynapar | Measurement range: 0/3000 (r.p.m.) Precision/resolution: 0.5 (pulses per revolution) |
| Power output | KPQA-01 | Measurement range: 0/1 (MW) Precision/resolution: 0.5 (%) |
| Water head | SITRANS LU150 | Measurement range: 0.25/5 (m) Precision/resolution: 0.25 (%) |
| Flow rate | KROHNE Optiflux 2100 | Measurement range: 0/400 (m/s) Precision/resolution: 0.3 (m/s) |
| Parameter | Parameters Uncertainty (%) |
|---|---|
| speed | 0.5 |
| Power output | 0.5 |
| Water head | 0.25 |
| Flow rate | 0.3 |
| Day | Flow Conditions | Water Level Control System | Optimal Water Level Control System |
|---|---|---|---|
| 25 May 2023 | Low flow day | −10.94% | 0.5% |
| 26 June 2023 | High flow day | −2.88% | 0.31% |
| Day | Flow Conditions | Water Level Control System | Optimal Water Level Control System |
|---|---|---|---|
| 25 May 2023 | Low flow rates | −14.91% | 0.06% |
| 26 June 2023 | High flow rates | −5.04% | −0.82% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-González, F.; Barbón, A.; Bayón, L.; Georgious, R. An Experimental Investigation of Various Control Systems for an Archimedes Screw Turbine in a Micro-Hydropower Plant. Appl. Sci. 2024, 14, 512. https://doi.org/10.3390/app14020512
González-González F, Barbón A, Bayón L, Georgious R. An Experimental Investigation of Various Control Systems for an Archimedes Screw Turbine in a Micro-Hydropower Plant. Applied Sciences. 2024; 14(2):512. https://doi.org/10.3390/app14020512
Chicago/Turabian StyleGonzález-González, Francisco, Arsenio Barbón, Luis Bayón, and Ramy Georgious. 2024. "An Experimental Investigation of Various Control Systems for an Archimedes Screw Turbine in a Micro-Hydropower Plant" Applied Sciences 14, no. 2: 512. https://doi.org/10.3390/app14020512