

Automatic GNSS Ionospheric Scintillation Detection with Radio Occultation Data Using Machine Learning Algorithm
Abstract
:1. Introduction
2. SSA-XGBoost Model
2.1. XGBoost
2.2. Sparrow Search Algorithm
- (1)
- When a sky enemy approaches a sparrow colony and is detected, the colony shifts position in time;
- (2)
- Under certain circumstances, the identities of the discoverers and the joiners are interchangeable;
- (3)
- The lower the fitness value of an individual sparrow, the harsher and more dangerous the area in which it forages.
2.3. Optimize XGBoost Using the Sparrow Search Algorithm
3. Experiments
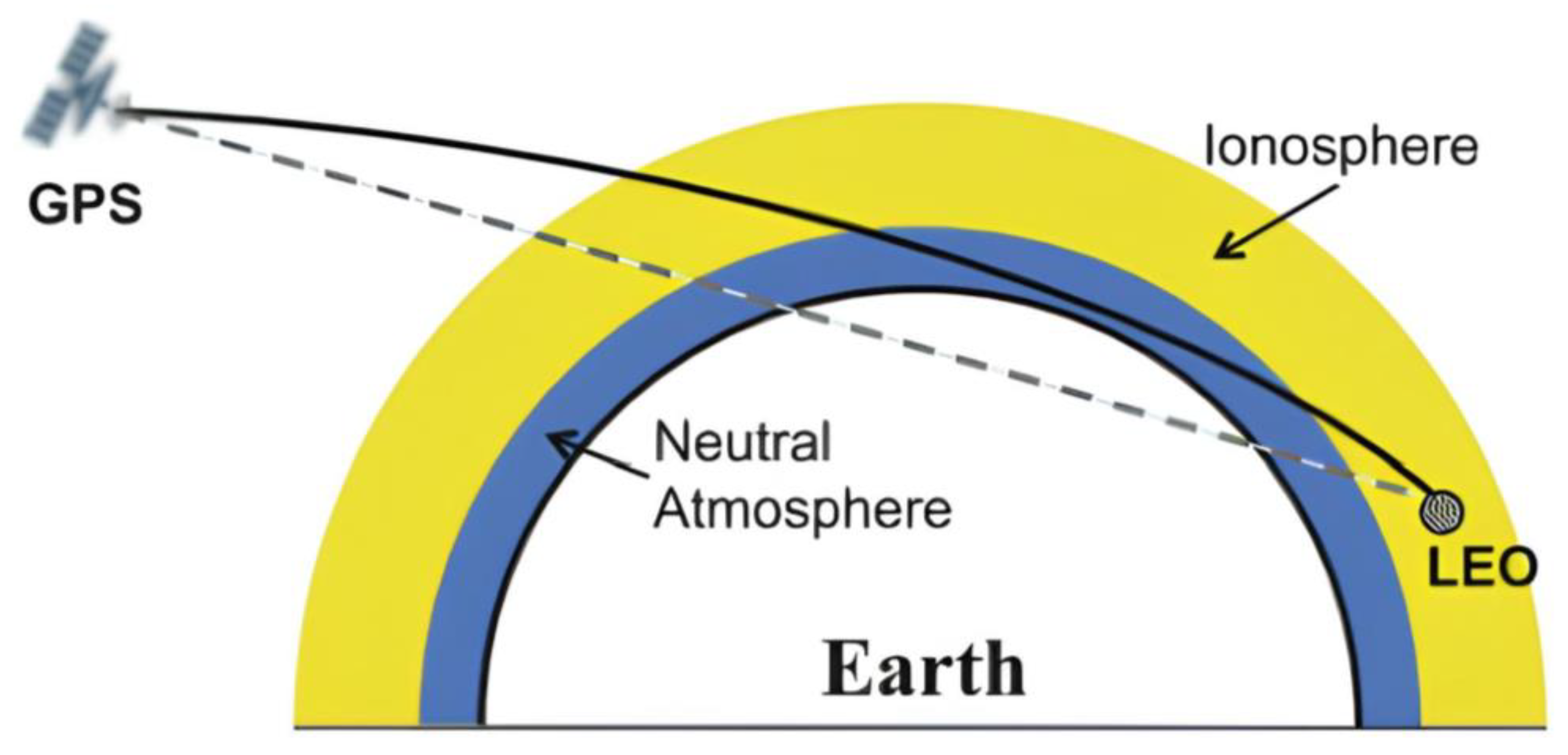
3.1. GNSS RO Dataset
- (a)
- The signal with data length N is divided equally into L segments, each with data length M;
- (b)
- The selected window function is added to each small segment of data, and the periodogram for each segment is derived to form a modified periodogram, which is then averaged over each modified periodogram;
- (c)
- Each corrected periodogram is approximated as uncorrelated with each other, and the result (processed using a smoothing algorithm) is used as the final power spectral density map.
3.2. Experimental Procedure
3.3. Evaluation Criteria
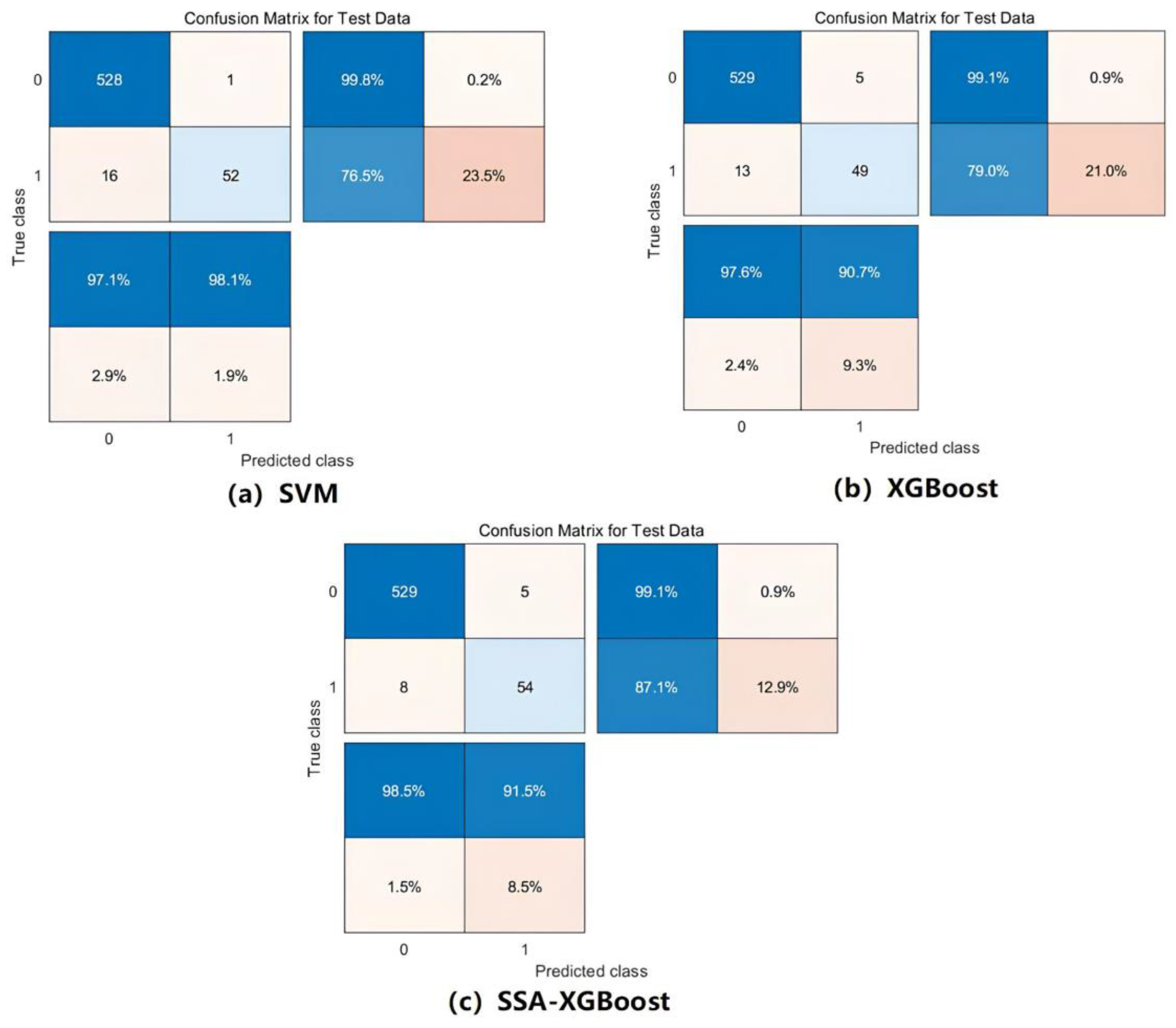
3.4. Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zuo, Z.Y.; Qiao, X.; Wu, Y.B. Concepts of comprehensive PNT and related key technologies. In Proceedings of the 2019 International Conference on Modeling, Analysis, Simulation Technologies and Applications (MASTA 2019), Hangzhou, China, 26–27 May 2019; Atlantis Press: Amsterdam, The Netherlands, 2019; pp. 365–370. [Google Scholar]
- Hess, V.F. Über Beobachtungen der durchdringenden Strahlung bei sieben Freiballonfahrten. Z. Phys. 1912, 13, 1084. [Google Scholar]
- Jiang, C.; Wei, L.; Yang, G.; Aa, E.; Lan, T.; Liu, T.; Zhao, Z. Large-scale ionospheric irregularities detected by ionosonde and GNSS receiver network. IEEE Geosci. Remote Sens. Lett. 2020, 18, 940–943. [Google Scholar] [CrossRef]
- Jiao, Y. Low-Latitude Ionospheric Scintillation Signal Simulation, Characterization, and Detection on GPS Signals. Ph.D. Thesis, Colorado State University, Fort Collins, CO, USA, 2017. [Google Scholar]
- Li, Q.; Yin, P. The characteristic study of ionospheric scintillations over China based on GNSS data. In Proceedings of the Ninth Annual China Satellite Navigation Symposium-S01 Satellite Navigation Application Technology 2018, Harbin, China, 23–25 May 2018; pp. 190–195. [Google Scholar]
- De Oliveira Moraes, A.; da Silveira Rodrigues, F.; Perrella, W.J.; de Paula, E.R. Analysis of the characteristics of low-latitude GPS amplitude scintillation measured during solar maximum conditions and implications for receiver performance. Surv. Geophys. 2012, 33, 1107–1131. [Google Scholar] [CrossRef]
- Linty, N.; Minetto, A.; Dovis, F.; Spogli, L. Effects of phase scintillation on the GNSS positioning error during the September 2017 storm at Svalbard. Space Weather 2018, 16, 1317–1329. [Google Scholar] [CrossRef]
- Xu, B.; Liu, D. Ionospheric Scintillation Effects on GNSS. GNSS World China 2011, 36, 5–8. [Google Scholar]
- An, P.; Xiao, Z.; Tang, X.; Sun, G. The Effect of Ionospheric Scintillation on Receiver. GNSS World China 2017, 42, 47–54. [Google Scholar]
- Liu, D.; Fen, J.; Deng, Z.; Zhen, W. Analysis of Ionospheric Scintillation Effects on GNSS Positioning. GNSS World China 2009, 34, 1–8. [Google Scholar]
- Pan, L.; Yin, P. Analysis of polar ionospheric scintillation characteristics based on GPS data. In Proceedings of the China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume I, Nanjing, China, 21–23 May 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 11–18. [Google Scholar]
- Ahmed, W.A.; Wu, F.; Agbaje, G.I.; Ednofri, E.; Marlia, D.; Zhao, Y. Seasonal ionospheric scintillation analysis during increasing solar activity at mid-latitude. In Optics in Atmospheric Propagation and Adaptive Systems XX; SPIE: Bellingham, WA, USA, 2017; Volume 10425, pp. 66–78. [Google Scholar]
- Yu, X.; Yue, X.; Zhen, W.; Xu, J.; Liu, D.; Guo, S. On the occurrence of F region irregularities over Haikou retrieved from COSMIC GPS radio occultation and ground-based ionospheric scintillation monitor observations. Radio Sci. 2017, 52, 34–48. [Google Scholar] [CrossRef]
- Liu, Y.; Fu, L.; Wang, J.; Zhang, C. Study of GNSS loss of lock characteristics under ionosphere scintillation with GNSS data at Weipa (Australia) during solar maximum phase. Sensors 2017, 17, 2205. [Google Scholar] [CrossRef]
- Bonafoni, S.; Biondi, R.; Brenot, H.; Anthes, R. Radio occultation and ground-based GNSS products for observing, understanding and predicting extreme events: A review. Atmos. Res. 2019, 230, 104624. [Google Scholar] [CrossRef]
- Yue, X.; Schreiner, W.S.; Pedatella, N.; Anthes, R.A.; Mannucci, A.J.; Straus, P.R.; Liu, J.Y. Space weather observations by GNSS radio occultation: From FORMOSAT-3/COSMIC to FORMOSAT-7/COSMIC-2. Int. J. Res. Appl. 2014, 12, 616–621. [Google Scholar] [CrossRef]
- Liu, J.Y.; Lin, C.H.; Rajesh, P.K.; Lin, C.Y.; Chang, F.Y.; Lee, I.T.; Chen, S.P. Advances in ionospheric space weather by using FORMOSAT-7/COSMIC-2 GNSS radio occultations. Atmosphere 2022, 13, 858. [Google Scholar] [CrossRef]
- Wang, G.; Shi, J.; Bai, W.; Galkin, I.; Wang, Z.; Sun, Y. Global ionospheric scintillations revealed by GPS radio occultation data with FY3C satellite before midnight during the March 2015 storm. Adv. Space Res. 2019, 63, 3119–3130. [Google Scholar] [CrossRef]
- Vankadara, R.K.; Jamjareegulgarn, P.; Seemala, G.K.; Siddiqui, M.I.H.; Panda, S.K. Trailing Equatorial Plasma Bubble Occurrences at a Low-Latitude Location through Multi-GNSS Slant TEC Depletions during the Strong Geomagnetic Storms in the Ascending Phase of the 25th Solar Cycle. Remote Sens. 2023, 15, 4944. [Google Scholar] [CrossRef]
- Taylor, S.; Morton, Y.; Jiao, Y.; Triplett, J.; Pelgrum, W. An improved ionosphere scintillation event detection and automatic trigger for GNSS data collection systems. In Proceedings of the 2012 International Technical Meeting of The Institute of Navigation, Nashville, TN, USA, 17–21 September 2012; pp. 1563–1569. [Google Scholar]
- Su, K.; Jin, S.; Hoque, M.M. Evaluation of ionospheric delay effects on multi-GNSS positioning performance. Remote Sens. 2019, 11, 171. [Google Scholar] [CrossRef]
- Mushini, S.C.; Jayachandran, P.T.; Langley, R.B.; MacDougall, J.W.; Pokhotelov, D. Improved amplitude-and phase-scintillation indices derived from wavelet detrended high-latitude GPS data. GPS Solut. 2012, 16, 363–373. [Google Scholar] [CrossRef]
- Jiao, Y.; Hall, J.J.; Morton, Y.T. Automatic equatorial GPS amplitude scintillation detection using a machine learning algorithm. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 405–418. [Google Scholar] [CrossRef]
- Jiao, Y.; Hall, J.; Morton, Y.J. Automatic GPS phase scintillation detector using a machine learning algorithm. In Proceedings of the 2017 International Technical Meeting of The Institute of Navigation 2017, Monterey, CA, USA, 2–30 January 2017; pp. 1160–1172. [Google Scholar]
- Linty, N.; Farasin, A.; Favenza, A.; Dovis, F. Detection of GNSS ionospheric scintillations based on machine learning decision tree. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 303–317. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Chauhan, V.K.; Dahiya, K.; Sharma, A. Problem formulations and solvers in linear SVM: A review. Artif. Intell. Rev. 2019, 52, 803–855. [Google Scholar] [CrossRef]
- Dey, A.; Rahman, M.; Ratnam, D.V.; Sharma, N. Automatic detection of gnss ionospheric scintillation based on extreme gradient boosting technique. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Charbuty, B.; Abdulazeez, A. Classification based on decision tree algorithm for machine learning. J. Appl. Sci. Technol. Trends 2021, 2, 20–28. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control. Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Jiao, Y.; Hall, J.J.; Morton, Y.T. Performance evaluation of an automatic GPS ionospheric phase scintillation detector using a machine-learning algorithm. NAVIGATION J. Inst. Navig. 2017, 64, 391–402. [Google Scholar] [CrossRef]
- Bonnedal, M.; Christensen, J.; Carlström, A.; Berg, A. Metop-GRAS in-orbit instrument performance. GPS Solut. 2010, 14, 109–120. [Google Scholar] [CrossRef]
- Montenbruck, O.; Andres, Y.; Bock, H.; van Helleputte, T.; van den Ijssel, J.; Loiselet, M.; Yoon, Y. Tracking and orbit determination performance of the GRAS instrument on MetOp-A. GPS Solut. 2008, 12, 289–299. [Google Scholar] [CrossRef]
- Youngworth, R.N.; Gallagher, B.B.; Stamper, B.L. An overview of power spectral density (PSD) calculations. Opt. Manuf. Test. VI 2005, 5869, 206–216. [Google Scholar]
- Jwo, D.J.; Chang, W.Y.; Wu, I.H. Windowing techniques, the welch method for improvement of power spectrum estimation. Comput. Mater. Contin. 2021, 67, 3983–4003. [Google Scholar] [CrossRef]
- Rahi, P.K.; Mehra, R. Analysis of power spectrum estimation using welch method for various window techniques. Int. J. Emerg. Technol. Eng. 2014, 2, 106–109. [Google Scholar]
- Ludwig-Barbosa, V.; Sievert, T.; Carlström, A.; Pettersson, M.I.; Vu, V.T.; Rasch, J. Supervised detection of ionospheric scintillation in low-latitude radio occultation measurements. Remote Sens. 2021, 13, 1690. [Google Scholar] [CrossRef]
- Guyon, I.; Makhoul, J.; Schwartz, R.; Vapnik, V. What size test set gives good error rate estimates? IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 52–64. [Google Scholar] [CrossRef]
- Krstinić, D.; Braović, M.; Šerić, L.; Božić-Štulić, D. Multi-label classifier performance evaluation with confusion matrix. Comput. Sci. Inf. Technol. 2020, 1, 1–14. [Google Scholar]
- Goutte, C.; Gaussier, E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. In Proceedings of the European Conference on Information Retrieval, Santiago de Compostela, Spain, 21–23 March 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- Luo, X.; Gu, S.; Lou, Y.; Cai, L.; Liu, Z. Amplitude scintillation index derived from C/N 0 measurements released by common geodetic GNSS receivers operating at 1 Hz. J. Geod. 2020, 94, 27. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, H.; Feng, Y.; Wang, X.; Liu, G.; Han, K.; Chen, J. Fast Fourier transform (FFT) using flash arrays for noise signal processing. IEEE Electron. Device Lett. 2022, 43, 1207–1210. [Google Scholar] [CrossRef]
- Sun, H.; Xu, L.; Wang, S.; Wu, Y. Development and Application of Ionospheric Detection Technology. In Proceedings of the 2nd International Conference on Electrical Engineering and Computer Technology (ICEECT 2022), Suzhou, China, 23–25 September 2022; IOP Publishing: Bristol, UK, 2022; Volume 2404, p. 012030. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameters | Means |
|---|---|
| n_estimators | Iterations |
| max_depth | Maximum tree depths |
| learning_rate | Learning rate |
| objective | Objective function |
| γ | Regularization parameter |
| min_child_weigh | Minimum leaf weights |
| Col No | Content | Note |
|---|---|---|
| 1st Col: | Class Label | 0: non-scintillation 1: scintillation |
| 2nd~end Col: | PSD |
| Algorithm | Accuracy | Precision | Recall | F-Score |
|---|---|---|---|---|
| SVM | 97.1% | 98.1% | 76.5% | 77.1% |
| XGBoost | 96.9% | 90.7% | 79% | 84.4% |
| SSA-XGBoost | 97.8% | 91.5% | 87.1% | 89.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, G.; Jin, R.; Zhen, W.; Yang, H. Automatic GNSS Ionospheric Scintillation Detection with Radio Occultation Data Using Machine Learning Algorithm. Appl. Sci. 2024, 14, 97. https://doi.org/10.3390/app14010097
Ji G, Jin R, Zhen W, Yang H. Automatic GNSS Ionospheric Scintillation Detection with Radio Occultation Data Using Machine Learning Algorithm. Applied Sciences. 2024; 14(1):97. https://doi.org/10.3390/app14010097
Chicago/Turabian StyleJi, Guangwang, Ruimin Jin, Weimin Zhen, and Huiyun Yang. 2024. "Automatic GNSS Ionospheric Scintillation Detection with Radio Occultation Data Using Machine Learning Algorithm" Applied Sciences 14, no. 1: 97. https://doi.org/10.3390/app14010097