

Monovision End-to-End Dual-Lane Overtaking Network without Map Assistance
Abstract
:1. Introduction
- This paper proposes an innovative method to address the relatively perilous challenge of overtaking in autonomous driving, substantiating the viability of the end-to-end approach in tackling this task.
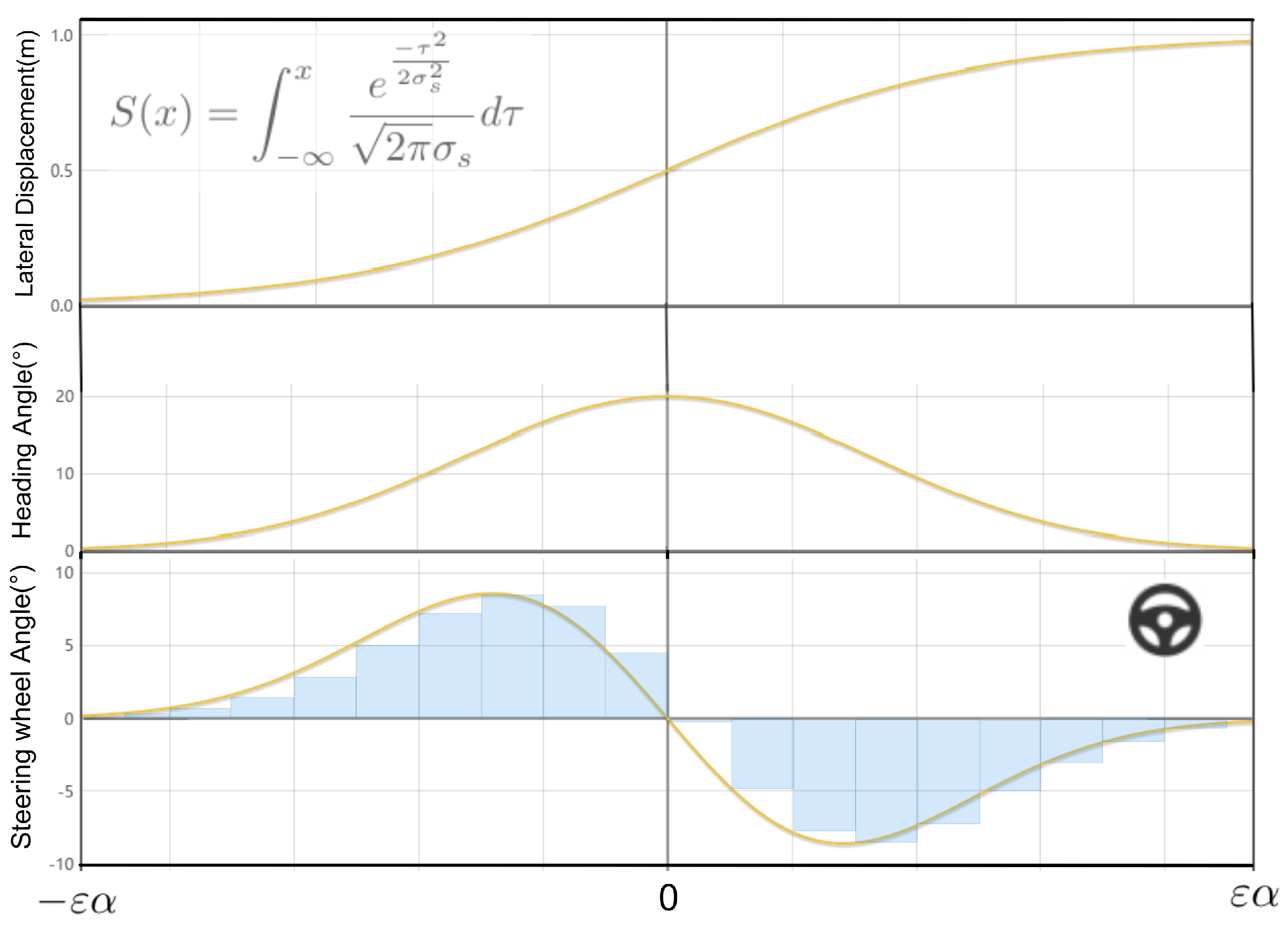
- This paper abandons the traditional tracking control method, and we design a control planner that can drive an overtaking curve with fixed lateral displacement at different speeds using geometric curves.
- This study established a dataset for dual-lane overtaking scenarios called CarlaLanePass, encompassing both successful and unsuccessful overtaking situations. CarlaLanePass offers a distinctive perspective that contributes to the realm of autonomous driving research.
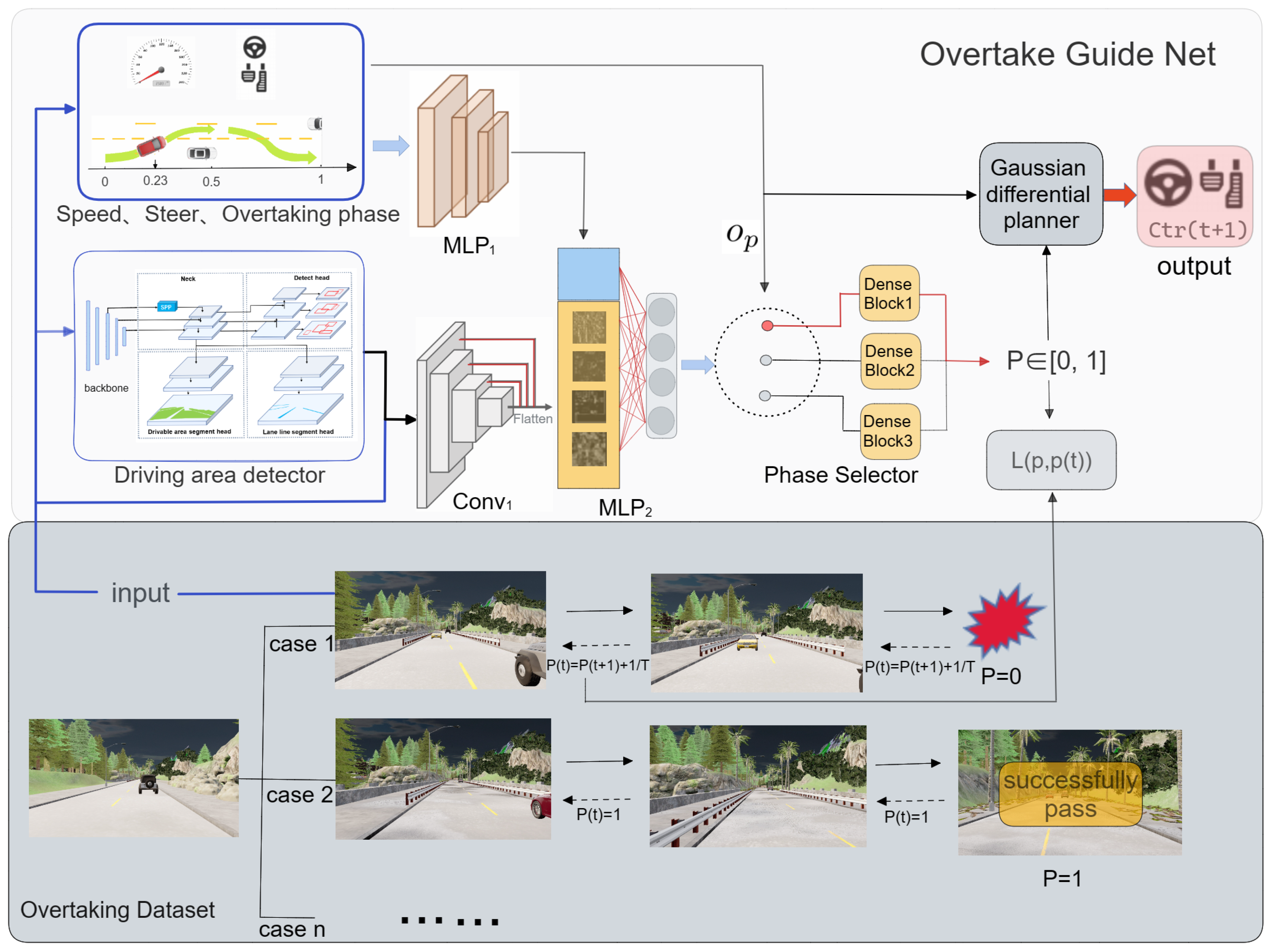
2. Overtaking Guide Net
2.1. Gaussian Differential Control Planner
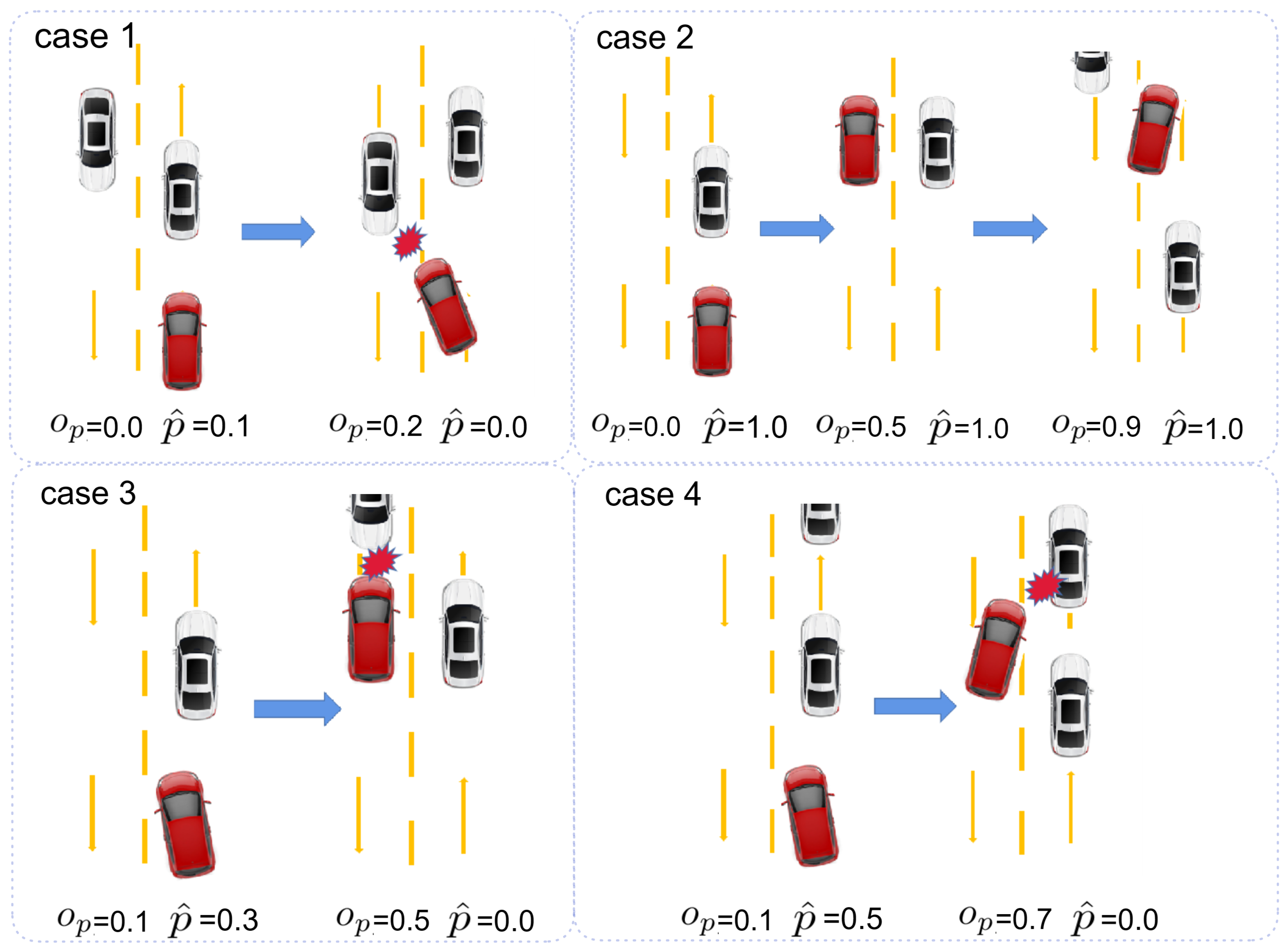
2.2. Overtake Feasibility Predictor
2.3. Loss Design
2.4. Algorithm Process
| Algorithm 1: OG-Net process. |
 |
2.5. CarlaLanePass Description
3. Simulation Experiment and Result Analysis
3.1. Training with Adaptive Data Importation
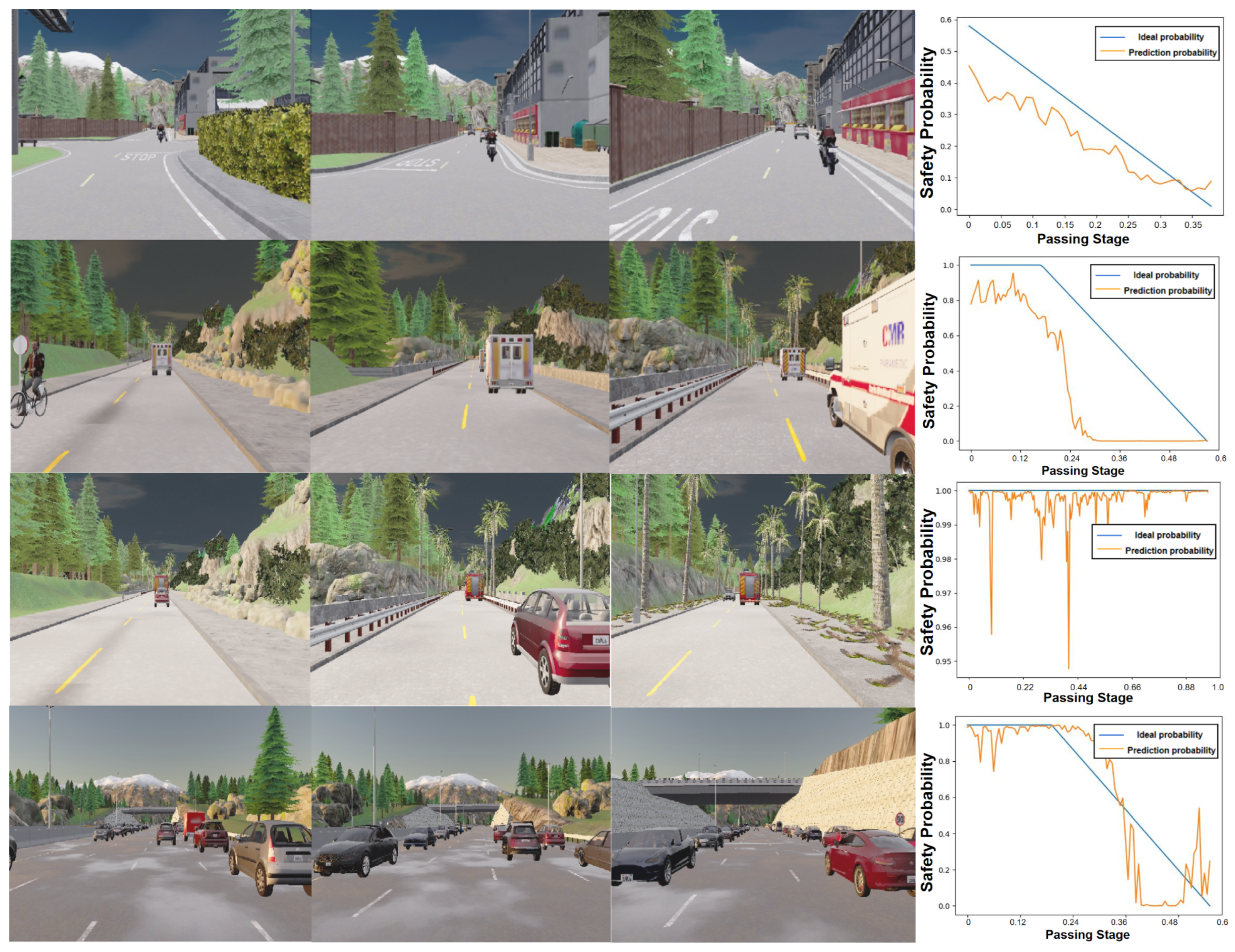
3.2. Predictor Test
3.3. Comparison with Existing Methods
- (i)
- The average L2 distance between the ideal and actual positions within the first five seconds of a successful overtaking maneuver.
- (ii)
- Time spent in the adjacent lane ;
- (iii)
- Number of overtaking maneuvers initiated ;
- (iv)
- Success percentage of overtaking maneuvers .
- (v)
- Collision probability .
- (vi)
- Average completion time per kilometer .
- (vii)
- Completion of selected road segments .
- (viii)
- Trajectory smoothness and control signal smoothness.
- Trajectory fitting analysis. The experiments showed that although our method did not discretize the reference point of the path like the traditional method and then carry out control planning towards the target path point, its actual effect was not poor for the overtaking route with a single trajectory. The differences between the ideal trajectory points and the actual trajectory points were calculated within the first five seconds, commencing from the initiation of the overtaking steering maneuver. In our approach, the steering control sequence was solely influenced by the velocity factor, resulting in consistent trajectories for the same velocity sequence. As a result, the disparities between the ideal and actual trajectories were significantly reduced compared to conventional methods. Table 2 reveals that our method demonstrated better performance in terms of trajectory fitting.
- Overtaking ability comparison. Existing lane-changing research methods generally involve motion planning based on the assumption of ideal perceptual information. Therefore, we compared the performance of our approach under two scenarios: one where the information about other vehicles was known, and another where the information about other vehicles was unknown. When the information about other vehicles was known, relative velocities and positions between vehicles were calculated, and GDCPs were employed to ensure path safety robustly. Simultaneously, in cases where the speeds of other vehicles were known, if the leading vehicle did not cooperate by reducing its speed, our method could abandon the overtaking attempt and ensure a return to the original lane within a certain timeframe. This contributed significantly to reducing the number of overtaking maneuvers initiated (). Our approach followed the principle of emulating human driver behavior, overtaking only when success is certain, resulting in a shorter time taken for overtaking () in comparison to other methods. In scenarios where perception accuracy is high, the advantages of the vehicular networking series of methods in terms of overtaking success are undeniable. This is because these methods not only acquire the positional information of surrounding vehicles but also gain insight into the intentions of other vehicles, which makes executing overtaking maneuvers more convenient. However, the requirement for all vehicles in the driving environment to be equipped with vehicular networking systems reveals certain drawbacks. Although the success rate of overtaking significantly drops when the perception information is less than ideal, the drop is not as pronounced compared to other perception-aware methods. This provides evidence that an end-to-end approach for achieving lane changes is indeed feasible.
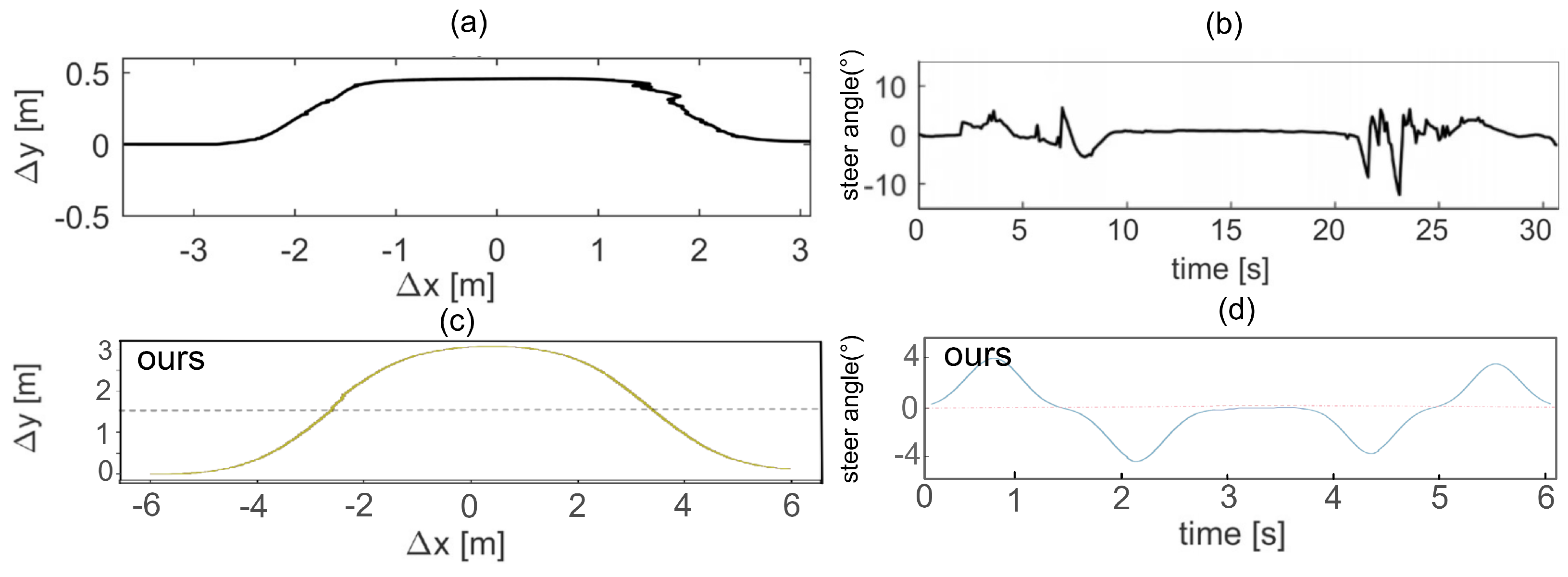
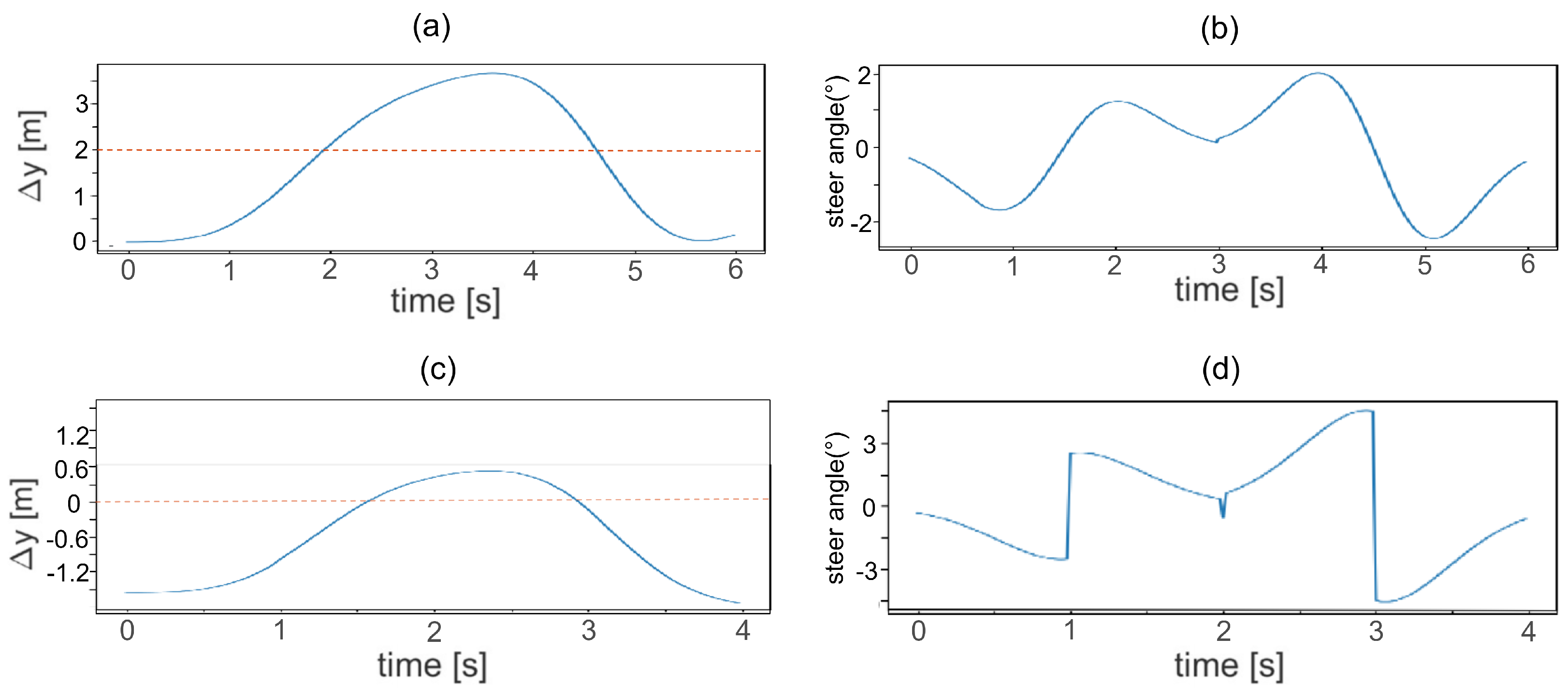
- Smoothness analysis. Traditional path planning involves first planning trajectory points and then executing trajectory tracking control. This approach offers the advantage of better robustness during the planning process, making it suitable for most autonomous driving scenarios. However, the scenarios addressed in this experiment involved relatively straightforward route options, encompassing only three situations: following a vehicle, overtaking, and returning to the original lane when danger is detected. The results of the experiment indicated that employing a method that directly plans control signals with varying maximum lateral displacements can effectively complete these tasks. This approach not only reduces the computational complexity but also ensures the smoothness of both the trajectory and control signals, ultimately enhancing passenger comfort. Huang et al. [4] built an overtaking environment with a mini car and recorded the overtaking track and the steering wheel angle signal. As one of the rare approaches that utilize common function curves for overtaking trajectory planning, our method was compared to the abovementioned method, and the trajectory outcomes are illustrated in Figure 5. Assuming that the speeds of the leading vehicle and the ego vehicle were constant, and using the geometric curve to plan the overtaking path, the route planned by the model in this paper was smoother, and the fluctuation of the control signal was not severe. This was because Huang et al.’s solution was to plan the trajectory first and then use the PID algorithm to restore the planned trajectory as much as possible. Our solution was to directly calculate the executed control signal based on the derivative of each key point of the target curve, so that both the control signal and the trajectory looked smoother.
3.4. Ego Vehicle Travels at Varying Speeds
3.5. Ablative Study and Visualization
- Predictor component analysis. In this paper, the ablation experiments of several innovative points were analyzed to verify the importance of each part, and the results are shown in Table 3. Firstly, in different overtaking stages, different image features may correspond to similar safety probabilities. Since we discarded the temporal network to learn contextual information, and the number of parameters required for optimal fitting varied across different overtaking stages, the Phase Selector (PS) played a crucial role. Due to the continuous distribution of probability label values in each group of data, it was challenging to quickly distinguish the features among the data. Numerous experiments have shown that directly importing all data for training without a pre-trained model can easily lead to oscillations and failure to converge at local optima. By importing the dataset in batches based on probability labels and prioritizing highly discriminative data for training, we achieved satisfactory fitting results.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ADIT | PS | Loss Function | Optimal Loss | Optimal Accuracy |
|---|---|---|---|---|
| √ | × | Our Loss | 0.425 | 76.6 |
| √ | √ | BCELoss | 0.381 | 79.6 |
| × | √ | Our Loss | 0.491 | 68.2 |
| × | × | BCELoss | 0.488 | 53.1 |
| √ | √ | Our Loss | 0.361 | 86.7 |
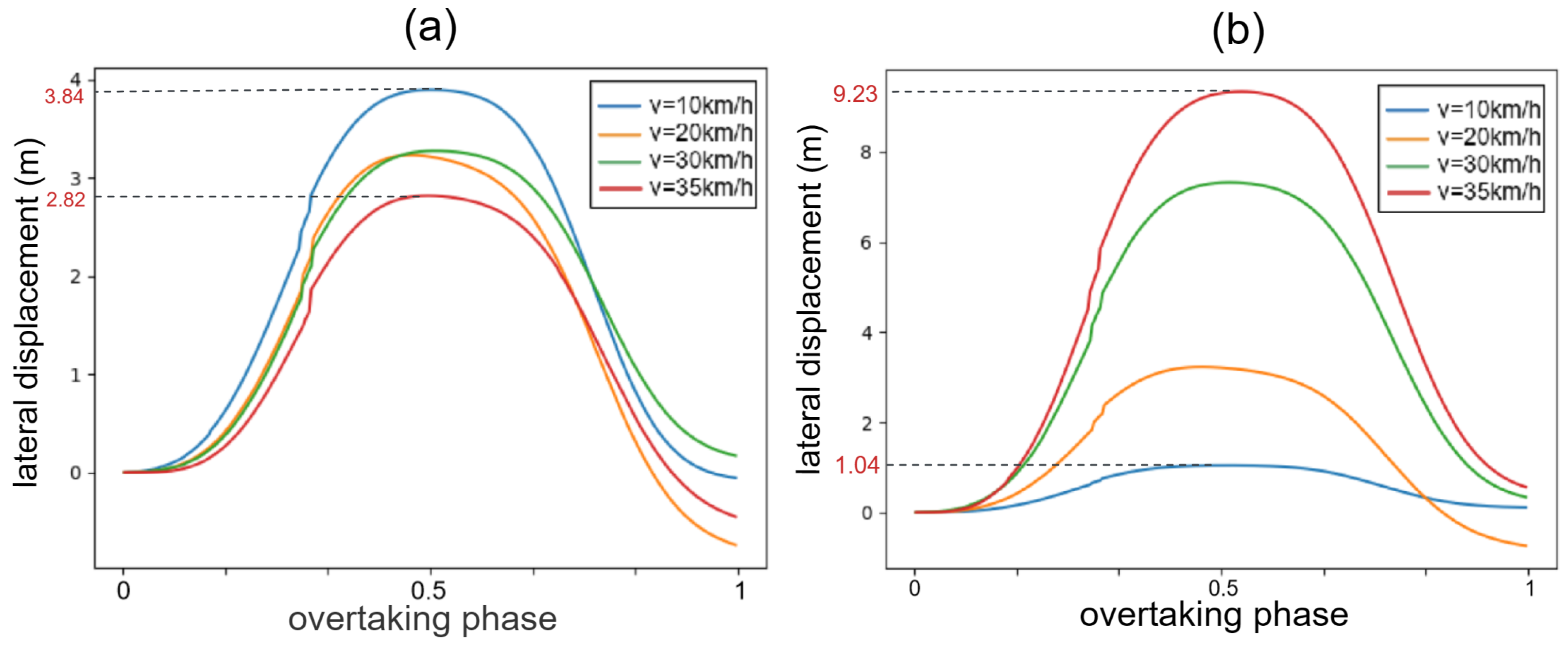
- Velocity adaptation coefficient. If one calculates the second derivative of the planned overtaking trajectory to derive the steering control signal sequence and then executes steering control at each moment, with a fixed velocity, the vehicle’s trajectory will be quite stable. However, in reality, different situations will result in varying velocities. If the vehicle’s speed is higher than the ideal speed, the traveled distance at each position will be greater, causing an increase in lateral displacement that could extend beyond the lane. Conversely, if the lateral displacement decreases, the vehicle could collide with the leading vehicle. Therefore, the introduction of the parameter can help control the variation in trajectory length while ensuring that even after a simple second-derivative calculation, the vehicle’s maximum lateral displacement is maintained. According to Figure 7, it can be seen that within the range of , the maximum lateral displacement was in the range of [2.82, 3.84] when was introduced, while the maximum lateral displacement without introducing was in the range of [1.04, 9.23].
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Da, F. Comprehensive Reactive Safety: No Need for A Trajectory If You Have A Strategy. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Toulouse, France, 2022; pp. 2903–2910. [Google Scholar]
- Fan, H.; Zhu, F.; Liu, C.; Zhang, L.; Zhuang, L.; Li, D.; Zhu, W.; Hu, J.; Li, H.; Kong, Q. Baidu apollo em motion planner. arXiv 2018, arXiv:1807.08048. [Google Scholar]
- Kurzer, K. Path Planning in Unstructured Environments: A Real-Time Hybrid A* Implementation for Fast and Deterministic Path Generation for the kth Research Concept Vehicle. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2016. [Google Scholar]
- Huang, X.; Zhang, W.; Li, P. A path planning method for vehicle overtaking maneuver using sigmoid functions. IFAC-PapersOnLine 2019, 52, 422–427. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, L.; Chen, J.; Shen, S. Safe trajectory generation for complex urban environments using spatio-temporal semantic corridor. IEEE Robot. Autom. Lett. 2019, 4, 2997–3004. [Google Scholar] [CrossRef]
- Brito, B.; Agarwal, A.; Alonso-Mora, J. Learning interaction-aware guidance policies for motion planning in dense traffic scenarios. arXiv 2021, arXiv:2107.04538. [Google Scholar]
- Chen, B.; Xu, M.; Liu, Z.; Li, L.; Zhao, D. Delay-aware multi-agent reinforcement learning for cooperative and competitive environments. arXiv 2020, arXiv:2005.05441. [Google Scholar]
- Ghimire, M.; Choudhury, M.R.; Lagudu, G.S.S.H. Lane Change Decision-Making through Deep Reinforcement Learning. arXiv 2021, arXiv:2112.14705. [Google Scholar]
- Yuan, F.; Shou, L.; Pei, J.; Lin, W.; Gong, M.; Fu, Y.; Jiang, D. Reinforced multi-teacher selection for knowledge distillation. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtually, 2–9 February 2021; Volume 35, pp. 14284–14291. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing atari with deep reinforcement learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Rasch, A.; Dozza, M. Modeling drivers’ strategy when overtaking cyclists in the presence of oncoming traffic. IEEE Trans. Intell. Transp. Syst. 2020, 23, 2180–2189. [Google Scholar] [CrossRef]
- Liu, J.; Luo, Y.; Zhong, Z.; Li, K.; Huang, H.; Xiong, H. A probabilistic architecture of long-term vehicle trajectory prediction for autonomous driving. Engineering 2022, 19, 228–239. [Google Scholar] [CrossRef]
- Eysenbach, B.; Salakhutdinov, R.R.; Levine, S. Robust predictable control. Adv. Neural Inf. Process. Syst. 2021, 34, 27813–27825. [Google Scholar]
- Mo, C.; Li, Y.; Zheng, L. Simulation and analysis on overtaking safety assistance system based on vehicle-to-vehicle communication. Automot. Innov. 2018, 1, 158–166. [Google Scholar] [CrossRef]
- Hegde, B.; Bouroche, M. Design of AI-based lane changing modules in connected and autonomous vehicles: A survey. In Proceedings of the Twelfth International Workshop on Agents in Traffic and Transportation, ATT 2022, Vienna, Austria, 25 July 2022. [Google Scholar]
- Zeng, W.; Luo, W.; Suo, S.; Sadat, A.; Yang, B.; Casas, S.; Urtasun, R. End-to-end interpretable neural motion planner. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8660–8669. [Google Scholar]
- Rhinehart, N.; McAllister, R.; Levine, S. Deep imitative models for flexible inference, planning, and control. arXiv 2018, arXiv:1810.06544. [Google Scholar]
- Han, L.; Wu, L.; Liang, F.; Cao, H.; Luo, D.; Zhang, Z.; Hua, Z. A novel end-to-end model for steering behavior prediction of autonomous ego-vehicles using spatial and temporal attention mechanism. Neurocomputing 2022, 490, 295–311. [Google Scholar] [CrossRef]
- Chen, L.; Tang, T.; Cai, Z.; Li, Y.; Wu, P.; Li, H.; Shi, J.; Yan, J.; Qiao, Y. Level 2 autonomous driving on a single device: Diving into the devils of openpilot. arXiv 2022, arXiv:2206.08176. [Google Scholar]
- Kalaria, D.; Lin, Q.; Dolan, J.M. Towards Safety Assured End-to-End Vision-Based Control for Autonomous Racing. arXiv 2023, arXiv:2303.02267. [Google Scholar] [CrossRef]
- Wu, P.; Jia, X.; Chen, L.; Yan, J.; Li, H.; Qiao, Y. Trajectory-guided control prediction for end-to-end autonomous driving: A simple yet strong baseline. arXiv 2022, arXiv:2206.08129. [Google Scholar]
- Perumal, P.S.; Wang, Y.; Sujasree, M.; Mukthineni, V.; Shimgekar, S.R. Intelligent advice system for human drivers to prevent overtaking accidents in roads. Expert Syst. Appl. 2022, 199, 117178. [Google Scholar] [CrossRef]
- Mandai, G.; Bhattacharya, D.; De, P. Real time vision based overtaking assistance system for drivers at night on two-lane single carriageway. Comput. Sist. 2021, 25, 403–416. [Google Scholar]
- Wu, D.; Liao, M.W.; Zhang, W.T.; Wang, X.G.; Bai, X.; Cheng, W.Q.; Liu, W.Y. Yolop: You only look once for panoptic driving perception. Mach. Intell. Res. 2022, 19, 550–562. [Google Scholar] [CrossRef]
- Chang, J.; Wang, L.; Meng, G.; Xiang, S.; Pan, C. Deep adaptive image clustering. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 5879–5887. [Google Scholar]
- Tariq, F.M.; Suriyarachchi, N.; Mavridis, C.; Baras, J.S. Cooperative Bidirectional Mixed-Traffic Overtaking. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; IEEE: Toulouse, France, 2022; pp. 2494–2501. [Google Scholar]
- Tariq, F.M.; Suriyarachchi, N.; Mavridis, C.; Baras, J.S. Vehicle overtaking in a bidirectional mixed-traffic setting. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; pp. 3132–3139. [Google Scholar]







| Layer Type | # of Filters | Activation Function | # |
|---|---|---|---|
| Driving area detector | |||
| yolop | |||
| Conv1 | |||
| ResNet-34 | |||
| MLP1 | |||
| FC | 128 | ReLu | ×2 |
| MLP2 | |||
| FC | 512 | ReLu | ×2 |
| FC | 256 | ReLu | ×1 |
| Dense Block1 | |||
| FC | 256 | ReLu | ×2 |
| FC | 1 | ReLu | ×1 |
| Dense Block2 | |||
| FC | 256 | ReLu | ×1 |
| FC | 128 | ReLu | ×1 |
| FC | 1 | ReLu | ×1 |
| Dense Block3 | |||
| FC | 256 | ReLu | ×2 |
| FC | 1 | ReLu | ×1 |
| Method | L2 (m) | Route Completion | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 s | 3 s | 5 s | |||||||
| EMPlanner [2] | 0.291 | 1.853 | 4.134 | 8.2 | 1.09 | 72.6 | 0.73 | 194.5 | 99.4 |
| TCP [21] | − | − | − | − | − | − | 0.84 | 215.6 | 97.1 |
| Cooperation [26] | 0.285 | 1.977 | 4.066 | 11.2 | 6.8 | 78.1 | 0.58 | 159.4 | 99.2 |
| Global Info [26] | 0.279 | 2.011 | 4.153 | 11.4 | 6.5 | 84.3 | 1.47 | 182.8 | 98.3 |
| KF Control [27] | 0.314 | 1.799 | 3.976 | 10.7 | 33.5 | 63.4 | 2.88 | 198.5 | 89.0 |
| GDCP | 0.276 | 1.919 | 3.906 | 5.2 | 3.2 | 81.7 | 0.71 | 147.4 | 98.7 |
| GDCP-OFP | 0.289 | 1.936 | 4.011 | 5.4 | 7.9 | 62.3 | 2.42 | 164.2 | 94.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Li, K. Monovision End-to-End Dual-Lane Overtaking Network without Map Assistance. Appl. Sci. 2024, 14, 38. https://doi.org/10.3390/app14010038
Li D, Li K. Monovision End-to-End Dual-Lane Overtaking Network without Map Assistance. Applied Sciences. 2024; 14(1):38. https://doi.org/10.3390/app14010038
Chicago/Turabian StyleLi, Dexin, and Kai Li. 2024. "Monovision End-to-End Dual-Lane Overtaking Network without Map Assistance" Applied Sciences 14, no. 1: 38. https://doi.org/10.3390/app14010038