
Modification of Genetic Algorithm Based on Extinction Events and Migration



Abstract
:1. Introduction
2. Research Gap
3. Genetic Algorithm Modification
- Population size—which was equal to 10 individuals in each generation;
- Number of generations between great extinctions, i.e., three generations;
- Extinction does not apply to the three best and three worst solutions;
- During great extinctions, the instantaneous space of admissible solutions covered the entire space;
- Instantaneous solution space size between great extinction events was defined as an area constituting 20% of the permissible solution space;
- The instantaneous solution space area extending beyond the permissible space was removed.
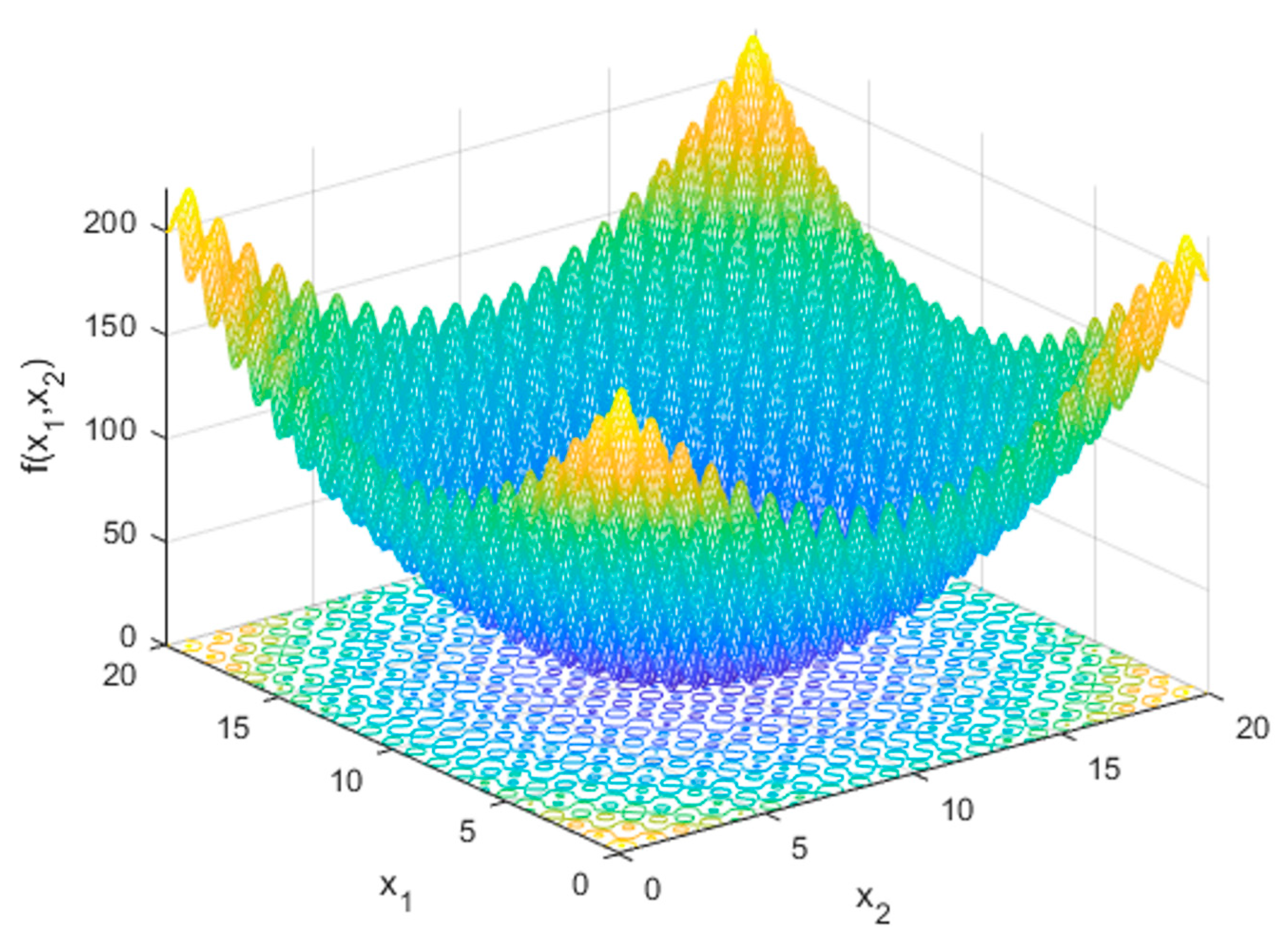
3.1. Testing Functions
| Algorithm 1: | |
| Input: | “initial population”(one agent), “global lower boundary conditions (BC)”, “global upper BC”, “initial agent”, “number of iteration” |
| “best agent” “initial population” For all “number of iteration” Do: If MOD(“number of iteration”,3) = 0 or “number of iteration” = 1 Lower local BC ← global lower BC Upper local BC ← global upper BC Else Lower local BC ← 20% of global lower BC (around last “best agent”) Upper local BC ← 20% of global upper BC (around last “best agent”) End If Until “number of generation” < 2 “number of generation” ← “number of generation”+1 Do: “Genetic Algorithm” → update “population” End Until “population” ← Sort “population” “best agent” ← best of “population” Delete “population” except 3 best and 3 worst agents “initial population” ← “population” End For Found minimum by “gradient method”, start from “best agent” | |
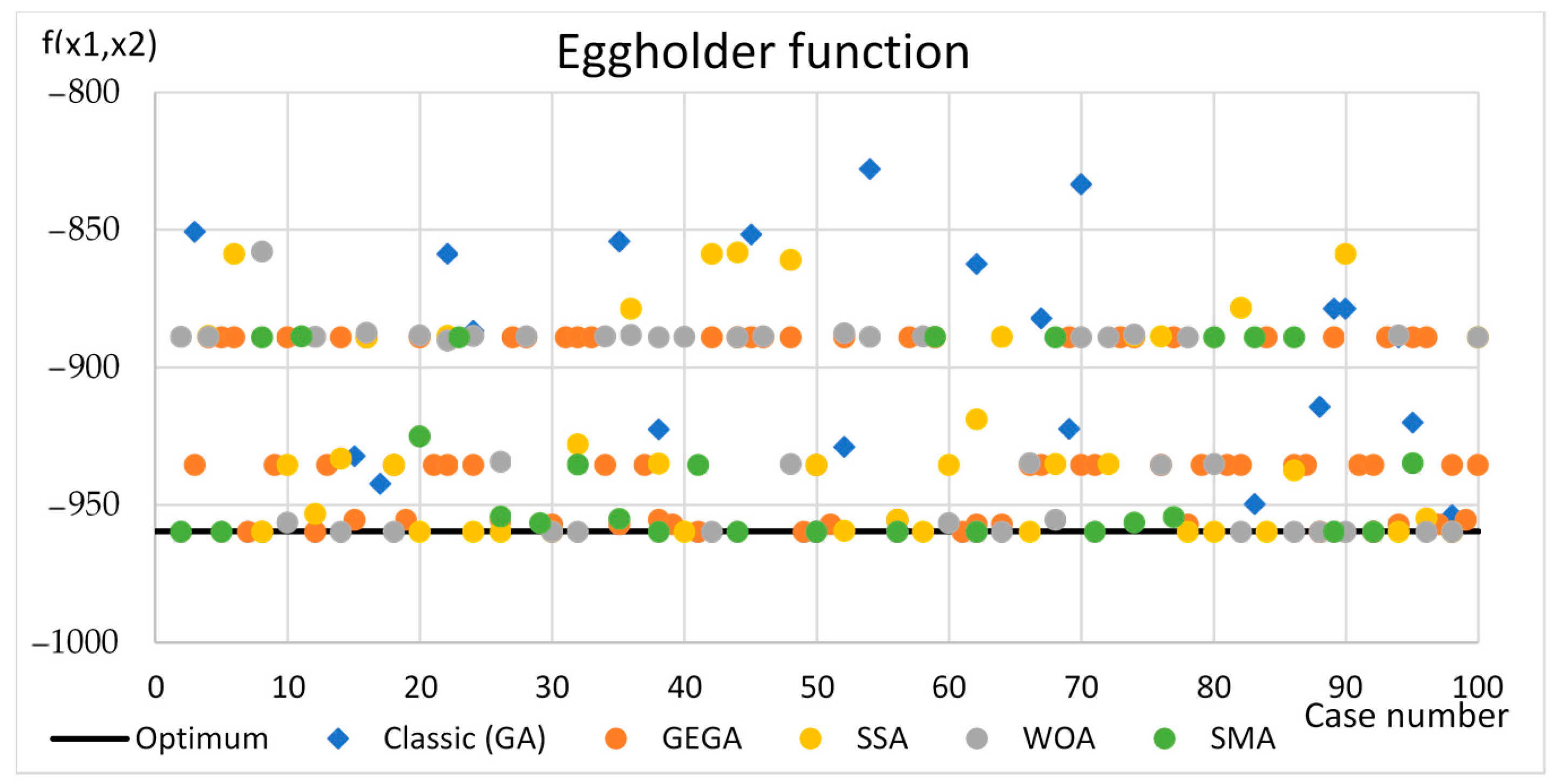
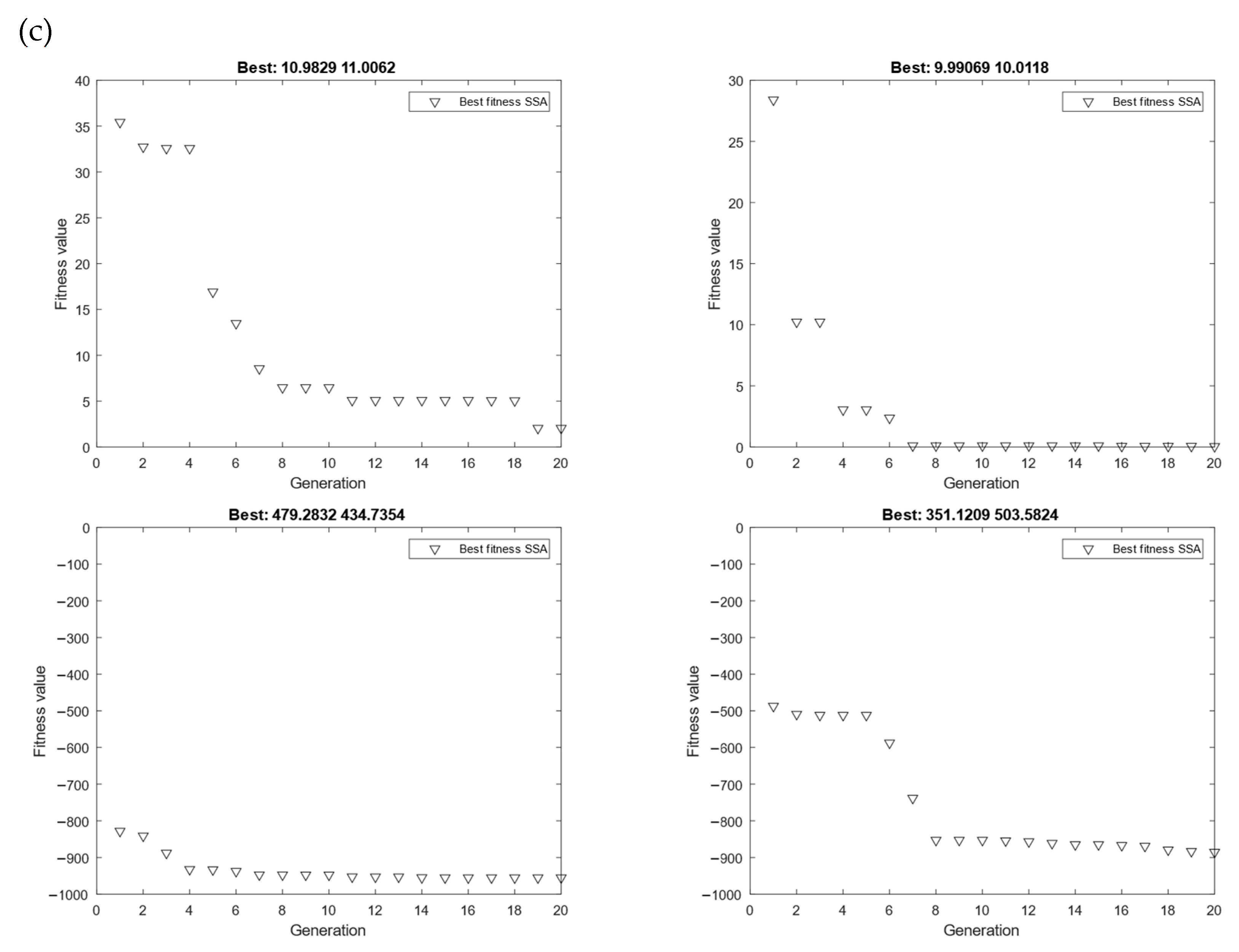
3.2. Algorithm Validation
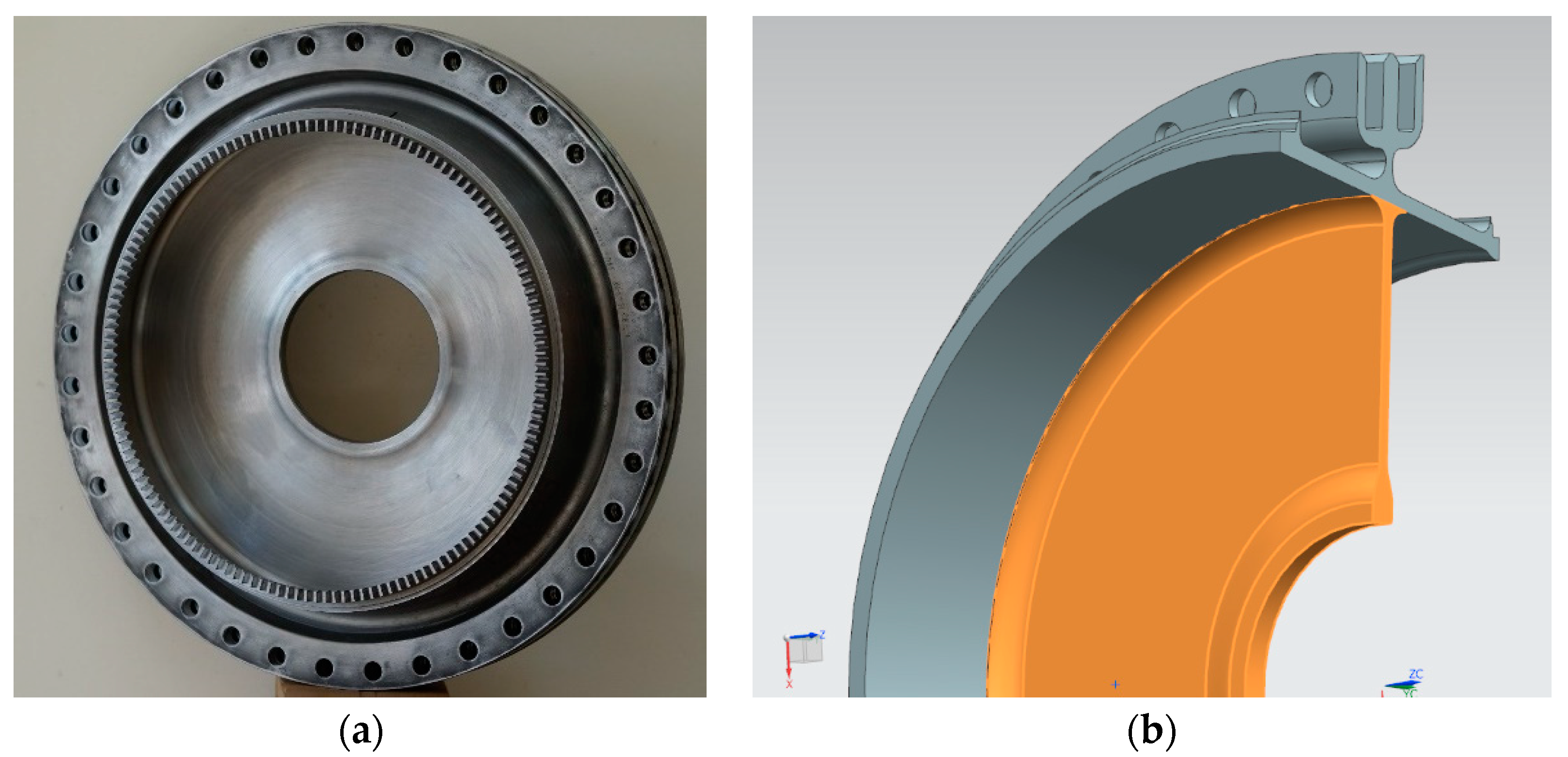
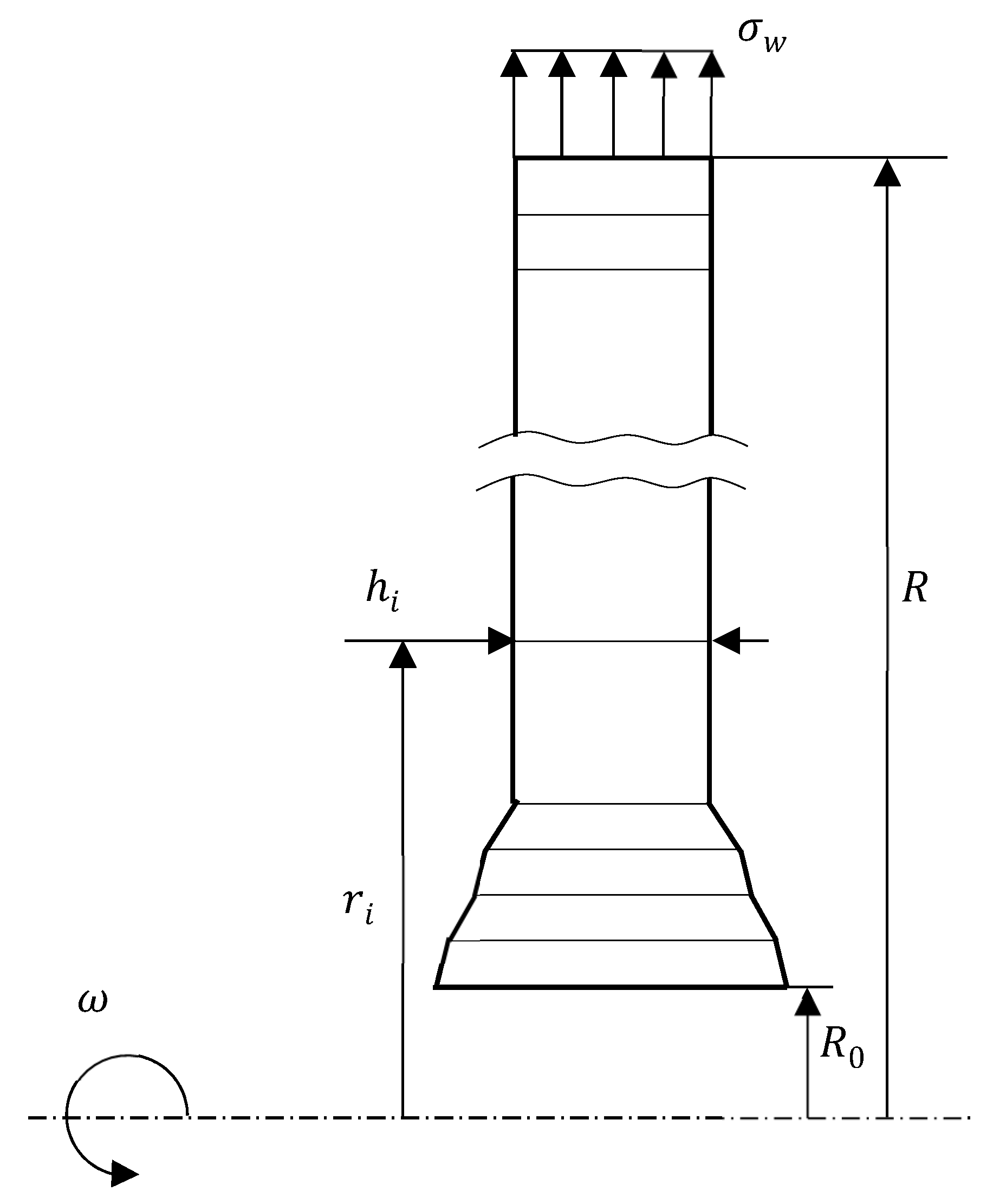
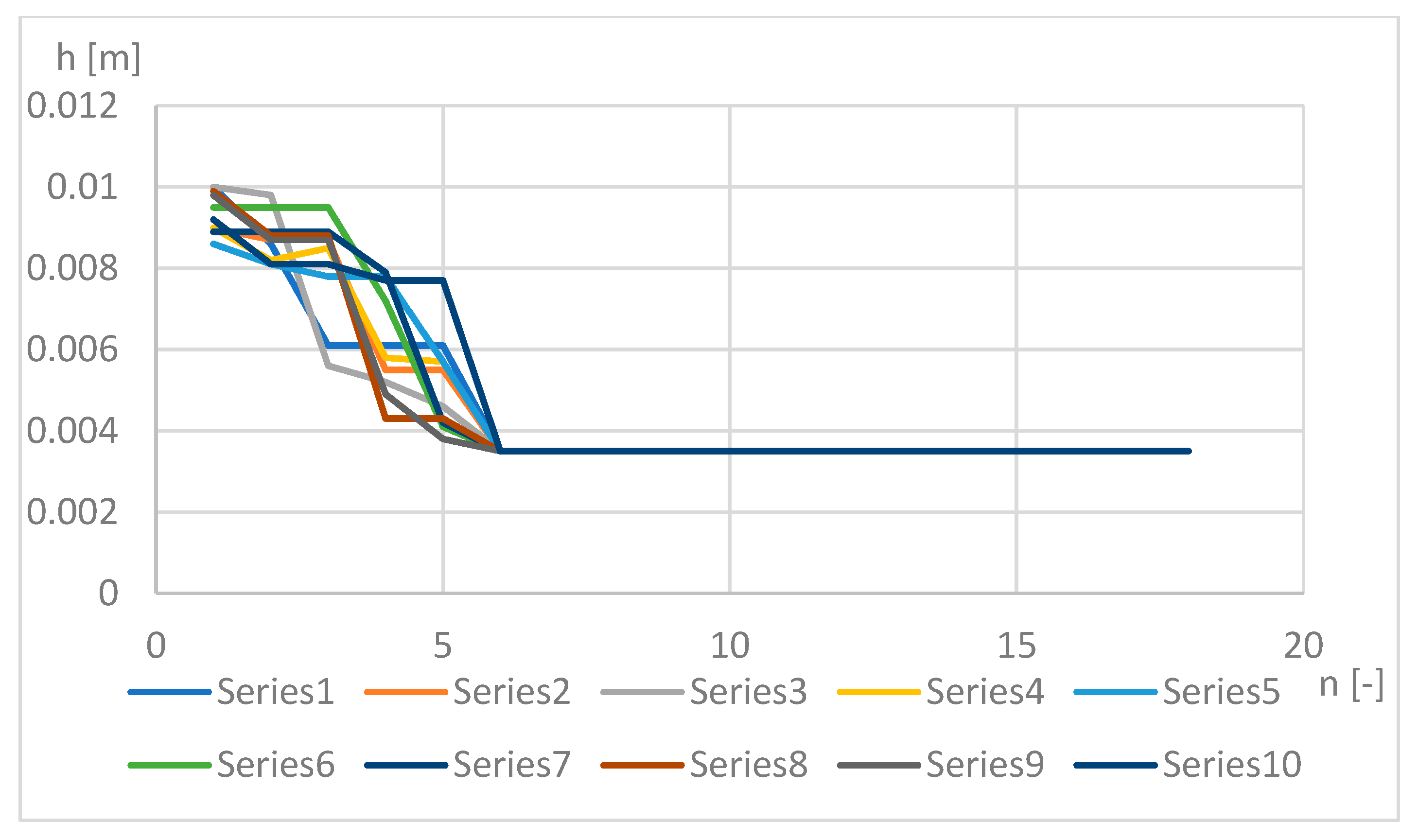
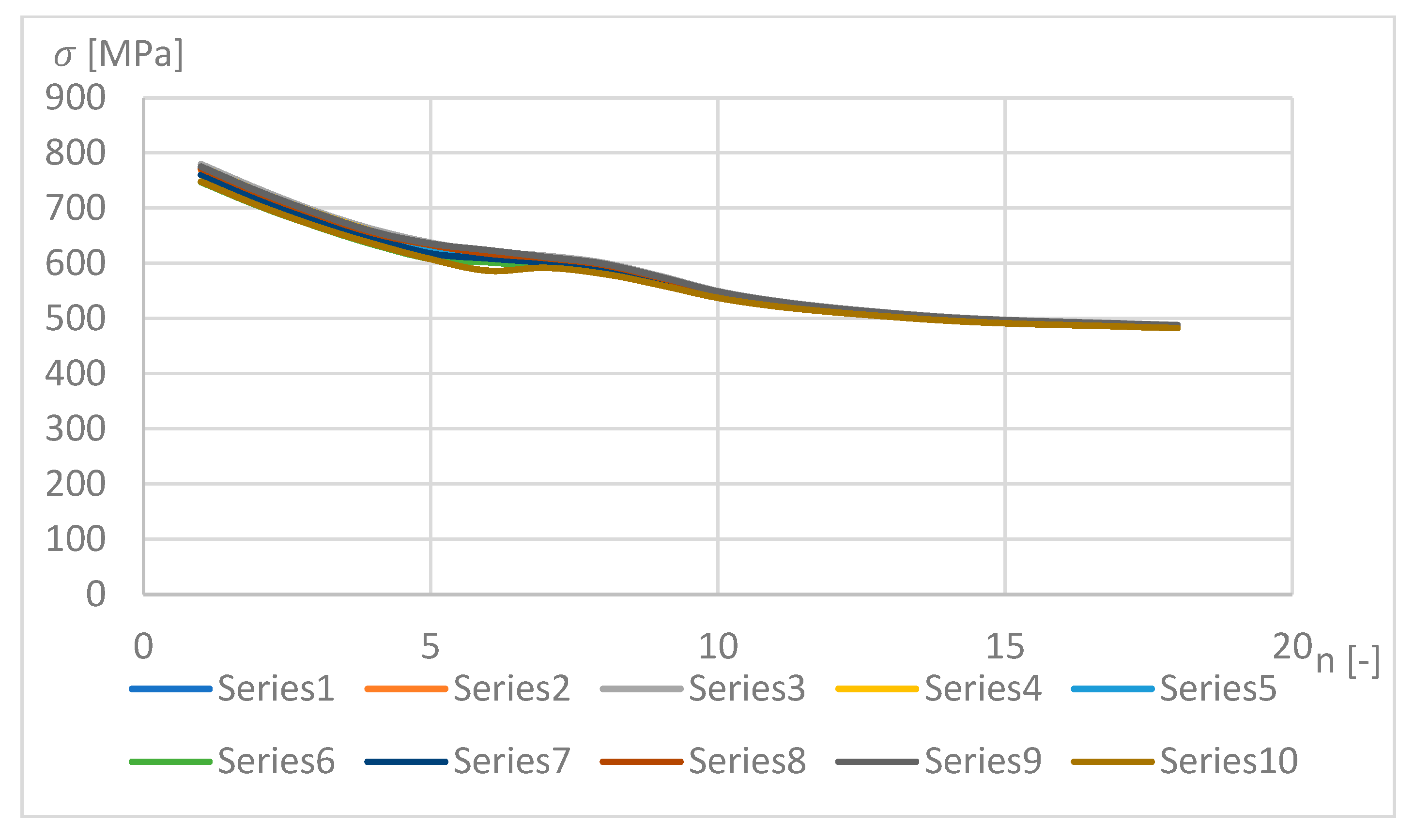
4. Compressor Disc Optimization
5. Conclusions
5.1. Limitations
5.2. Further Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Grate Extinction Algorithm Code [63]
|
Appendix B. Eggholder Function Code [63]
|
References
- Chen, L.; Asteris, P.G.; Tsoukalas, M.Z.; Armaghani, D.J.; Ulrikh, D.V.; Yari, M. Forecast of Airblast Vibrations Induced by Blasting Using Support Vector Regression Optimized by the Grasshopper Optimization (SVR-GO) Technique. Appl. Sci. 2022, 12, 9805. [Google Scholar] [CrossRef]
- Li, G.; Li, Y.; Chen, H.; Deng, W. Fractional-Order Controller for Course-Keeping of Underactuated Surface Vessels Based on Frequency Domain Specification and Improved Particle Swarm Optimization Algorithm. Appl. Sci. 2022, 12, 3139. [Google Scholar] [CrossRef]
- Szalai, S.; Herold, B.; Kurhan, D.; Németh, A.; Sysyn, M.; Fischer, S. Optimization of 3D Printed Rapid Prototype Deep Drawing Tools for Automotive and Railway Sheet Material Testing. Infrastructures 2023, 8, 43. [Google Scholar] [CrossRef]
- Ameen, F. Optimization of the Synthesis of Fungus-Mediated Bi-Metallic Ag-Cu Nanoparticles. Appl. Sci. 2022, 12, 1384. [Google Scholar] [CrossRef]
- Dong, L.; Qin, L.; Xie, X.; Zhang, L.; Qin, X. Collaborative Optimization Method for Multi-Train Energy-Saving Control with Urban Rail Transit Based on DRLDA Algorithm. Appl. Sci. 2023, 13, 2454. [Google Scholar] [CrossRef]
- Burrascano, P. Parameter Optimization for an Accurate Swept-Sine Identification Procedure of Nonlinear Systems. Appl. Sci. 2023, 13, 1223. [Google Scholar] [CrossRef]
- Imran, M.; Shi, D.; Tong, L.; Waqas, H.M. Design optimization of composite submerged cylindrical pressure hull using genetic algorithm and finite element analysis. Ocean. Eng. 2019, 190, 106443. [Google Scholar] [CrossRef]
- Chan, C.M.; Bai, H.L.; He, D.Q. Blade shape optimization of the Savonius wind turbine using a genetic algorithm. Appl. Energy 2018, 213, 148–157. [Google Scholar] [CrossRef]
- Ding, Y.; Zhang, W.; Yu, L.; Lu, K. The accuracy and efficiency of GA and PSO optimization schemes on estimating reaction kinetic parameters of biomass pyrolysis. Energy 2019, 176, 582–588. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic Algorithms. Sci. Am. 1992, 267, 66–73. Available online: http://papers.cumincad.org/data/works/att/7e68.content.pdf (accessed on 24 August 2022). [CrossRef]
- Lee, C.K.H. A review of applications of genetic algorithms in operations management. Eng. Appl. Artif. Intell. 2018, 76, 1–12. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Deb, K.; Agrawal, R.B. Simulated Binary Crossover for Continuous Search Space. Complex Syst. 1995, 9, 115–148. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.26.8485&rep=rep1&type=pdf (accessed on 8 August 2022).
- Eshelman, L.J.; Caruana, R.A.; Schaffer, J.D. Biases in the Crossover Landscape. In Proceedings of the Third International Conference on Genetic Algorithms, 1989; pp. 10–19. Available online: https://www.academia.edu/17531298/Biases_in_the_Crossover_Landscape (accessed on 7 July 2022).
- Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar] [CrossRef]
- Ono, I.; Kita, H.; Kobayashi, S. A Real-coded Genetic Algorithm using the Unimodal Normal Distribution Crossover. In Advances in Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2003; pp. 246–253. [Google Scholar] [CrossRef]
- Deep, K.; Thakur, M. A new crossover operator for real coded genetic algorithms. Appl. Math. Comput. 2007, 188, 895–911. [Google Scholar] [CrossRef]
- Blickle, T.; Thiele, L. A comparison of selection schemes used in evolutionary algorithms. Evol. Comput. 1996, 4, 361–394. [Google Scholar] [CrossRef]
- Baker, J.E. Adaptive selection methods for genetic algorithms. In Proceedings of the An International Conference on Genetic Algorithms and Their Applications Pittsburg, Pittsburg, PA, USA, 24–26 July 1985; ISBN 0-8058-0426-9. [Google Scholar]
- Goldberg, D.E.; Korb, B.; Drb, K. Messy genetic algorithms: Motivation, analysis, and first results. Complex Syst. 1989, 3, 493–530. [Google Scholar]
- Dianati, M.; Song, I.; Treiber, M. An Introduction to Genetic Algorithms and Evolution Strategies; Technical Report; University of Waterloo: Waterloo, ON, Canada, 2002; Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.92.6910&rep=rep1&type=pdf (accessed on 24 August 2022).
- Sivaram, M.; Batri, K.; Mohammed, A.S.; Porkodi, V. Exploiting the Local Optima in Genetic Algorithm using Tabu Search. Indian J. Sci. Technol. 2019, 12, 1–13. [Google Scholar] [CrossRef]
- Hamamoto, A.H.; Carvalho, L.F.; Sampaio, L.D.H.; Abrão, T.; Proença, M.L. Network Anomaly Detection System using Genetic Algorithm and Fuzzy Logic. Expert Syst. Appl. 2018, 92, 390–402. [Google Scholar] [CrossRef]
- Reynolds, J.; Rezgui, Y.; Kwan, A.; Piriou, S. A zone-level, building energy optimisation combining an artificial neural network, a genetic algorithm, and model predictive control. Energy 2018, 151, 729–739. [Google Scholar] [CrossRef]
- Kieszek, R.; Kozakiewicz, A.; Rogólski, R. Optimization of a Jet Engine Compressor Disc with Application of Artificial Neural Networks for Calculations Related to Time and Mass Criteria. Adv. Sci. Technol. Res. J. 2021, 15, 208–218. [Google Scholar] [CrossRef]
- Jaworski, B.; Kuczkowski, L.; Śmierzchalski, R.; Kolendo, P. Extinction event concepts for the evolutionary algorithms. Przegląd Elektrotechniczny 2012, 88, 252–255. [Google Scholar]
- Jafar-Zanjani, S.; Inampudi, S.; Mosallaei, H. Adaptive Genetic Algorithm for Optical Metasurfaces Design. Sci. Rep. 2018, 8, 1–16. [Google Scholar] [CrossRef]
- Iba, K. Reactive power optimization by genetic algorithm. IEEE Trans. Power Syst. 1994, 9, 685–692. [Google Scholar] [CrossRef]
- Ding, S.; Su, C.; Yu, J. An optimizing BP neural network algorithm based on genetic algorithm. Artif. Intell. Rev. 2011, 36, 153–162. [Google Scholar] [CrossRef]
- Deaven, D.M.; Ho, K.M. Molecular Geometry Optimization with a Genetic Algorithm. Phys. Rev. Lett. 1995, 75, 288–291. [Google Scholar] [CrossRef]
- Kim, C.; Batra, R.; Chen, L.; Tran, H.; Ramprasad, R. Polymer design using genetic algorithm and machine learning. Comput. Mater. Sci. 2021, 186, 110067. [Google Scholar] [CrossRef]
- Kozakiewicz, A.; Kieszek, R. Artificial Neural Network Structure Optimisation in the Pareto Approach on the Example of Stress Prediction in the Disk-Drum Structure of an Axial Compressor. Materials 2022, 15, 4451. [Google Scholar] [CrossRef]
- Ryu, J. A Visual Saliency-Based Neural Network Architecture for No-Reference Image Quality Assessment. Appl. Sci. 2022, 12, 9567. [Google Scholar] [CrossRef]
- Liang, B.; Han, S.; Li, W.; Fu, D.; He, R.; Huang, G. Accurate Spatial Positioning of Target Based on the Fusion of Uncalibrated Image and GNSS. Remote. Sens. 2022, 14, 3877. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Zhang, N.; Zhang, Y.; Zhao, Z.; Xu, D.; Ben, G.; Gao, Y. Deep Learning-Based Object Detection Techniques for Remote Sensing Images: A Survey. Remote Sens. 2022, 14, 2385. [Google Scholar] [CrossRef]
- Wang, B.; Wang, S.; Zeng, D.; Wang, M. Convolutional Neural Network-Based Radar Antenna Scanning Period Recognition. Electronics 2022, 11, 1383. [Google Scholar] [CrossRef]
- Kim, K. Multi-Agent Deep Q Network to Enhance the Reinforcement Learning for Delayed Reward System. Appl. Sci. 2022, 12, 3520. [Google Scholar] [CrossRef]
- Zhao, X.; Shao, F.; Zhang, Y. A Novel Joint Adversarial Domain Adaptation Method for Rotary Machine Fault Diagnosis under Different Working Conditions. Sensors 2022, 22, 9007. [Google Scholar] [CrossRef] [PubMed]
- Kondo, K.; Hasegawa, T. Sensor-Based Human Activity Recognition Using Adaptive Class Hierarchy. Sensors 2021, 21, 7743. [Google Scholar] [CrossRef] [PubMed]
- Daneshdoost, F.; Hajiaghaei-Keshteli, M.; Sahin, R.; Niroomand, S. Tabu search based hybrid meta-heuristic approaches for schedule-based production cost minimization problem for the case of cable manufacturing systems. Informatica 2022, 33, 499–522. [Google Scholar] [CrossRef]
- Ghazikhani, A.; Babaeian, I.; Gheibi, M.; Hajiaghaei-Keshteli, M.; Fathollahi-Fard, A.M. A Sustainable Climate Forecast System for Post-Processing of Precipitation with Application of Machine Learning Computations. 2022. Available online: https://doi.org/10.21203/rs.3.rs-1552614/v1 (accessed on 11 March 2023). [CrossRef]
- Ghazikhani, A.; Babaeian, I.; Gheibi, M.; Hajiaghaei-Keshteli, M.; Fathollahi-Fard, A.M. A Smart Post-Processing System for Forecasting the Climate Precipitation Based on Machine Learning Computations. Sustainability 2022, 14, 6624. [Google Scholar] [CrossRef]
- Abdi, A.; Abdi, A.; Akbarpour, N.; Amiri, A.S.; Hajiaghaei-Keshteli, M. Innovative approaches to design and address green supply chain network with simultaneous pick-up and split delivery. J. Clean. Prod. 2020, 250, 119437. [Google Scholar] [CrossRef]
- Liao, Y.; Kaviyani-Charati, M.; Hajiaghaei-Keshteli, M.; Diabat, A. Designing a closed-loop supply chain network for citrus fruits crates considering environmental and economic issues. J. Manuf. Syst. 2020, 55, 199–220. [Google Scholar] [CrossRef]
- Cheraghalipour, A.; Paydar, M.M.; Hajiaghaei-Keshteli, M. An integrated approach for collection center selection in reverse logistics. Int. J. Eng. 2017, 30, 1005–1016. [Google Scholar]
- Taghipour, A.; Khazaei, M.; Azar, A.; Ghatari, A.R.; Hajiaghaei-Keshteli, M.; Ramezani, M. Creating Shared Value and Strategic Corporate Social Responsibility through Outsourcing within Supply Chain Management. Sustainability 2022, 14, 1940. [Google Scholar] [CrossRef]
- Chouhan, V.K.; Khan, S.H.; Hajiaghaei-Keshteli, M. Sustainable planning and decision-making model for sugarcane mills considering environmental issues. J. Environ. Manag. 2021, 303, 114252. [Google Scholar] [CrossRef] [PubMed]
- Tang, Y.; Tan, S.; Zhou, D. An Improved Failure Mode and Effects Analysis Method Using Belief Jensen–Shannon Divergence and Entropy Measure in the Evidence Theory. Arab. J. Sci. Eng. 2023, 48, 7163–7176. [Google Scholar] [CrossRef]
- Fathollahi-Fard, A.M.; Hajiaghaei-Keshteli, M.; Tavakkoli-Moghaddam, R. Red deer algorithm (RDA): A new nature-inspired meta-heuristic. Soft Comput. 2020, 24, 14637–14665. [Google Scholar] [CrossRef]
- Chouhan, V.K.; Khan, S.H.; Hajiaghaei-Keshteli, M. Metaheuristic approaches to design and address multi-echelon sugarcane closed-loop supply chain network. Soft Comput 2021, 25, 11377–11404. [Google Scholar] [CrossRef]
- Fathollahi-Fard, A.M.; Hajiaghaei-Keshteli, M.; Tavakkoli-Moghaddam, R. The social engineering optimizer (SEO). Eng. Appl. Artif. Intell. 2018, 72, 267–293. [Google Scholar] [CrossRef]
- Goodarzian, F.; Ghasemi, P.; Kumar, V.; Abraham, A. A new modified social engineering optimizer algorithm for engineering applications. Soft Comput. 2022, 26, 4333–4361. [Google Scholar] [CrossRef]
- Piskin, A.; Baklacioglu, T.; Turan, O. Optimization and off-design calculations of a turbojet engine using the hybrid ant colony—Particle swarm optimization method. Aircr. Eng. Aerosp. Technol. 2022, 94, 1025–1035. [Google Scholar] [CrossRef]
- Aydın, E.; Turan, O. Performance models of passenger aircraft and propulsion systems based on particle swarm and Spotted Hyena Optimization methods. Energy 2023, 268, 126659. [Google Scholar] [CrossRef]
- Hajiaghaei-Keshteli, M.; Aminnayeri, M. Keshtel Algorithm (KA); a new optimization algorithm inspired by Keshtels’ feeding. In Proceedings of the IEEE Conference on Industrial Engineering and Management Systems, Bangkok, Thailand, 10–13 December 2013; pp. 2249–2253. [Google Scholar]
- Hajiaghaei-Keshteli, M.; Aminnayeri, M. Solving the integrated scheduling of production and rail transportation problem by Keshtel algorithm. Appl. Soft Comput. 2014, 25, 184–203. [Google Scholar] [CrossRef]
- Chouhan, V.K.; Khan, S.H.; Hajiaghaei-Keshteli, M. Hierarchical tri-level optimization model for effective use of by-products in a sugarcane supply chain network. Appl. Soft Comput. 2022, 128, 109468. [Google Scholar] [CrossRef]
- Salehi-Amiri, A.; Zahedi, A.; Gholian-Jouybari, F.; Calvo, E.Z.R.; Hajiaghaei-Keshteli, M. Designing a Closed-loop Supply Chain Network Considering Social Factors; A Case Study on Avocado Industry. Appl. Math. Model. 2021, 101, 600–631. [Google Scholar] [CrossRef]
- Abbasi, S.; Daneshmand-Mehr, M.; Kanafi, A.G. Green Closed-Loop Supply Chain Network Design During the Coronavirus (COVID-19) Pandemic: A Case Study in the Iranian Automotive Industry. Environ. Model. Assess. 2022, 28, 69–103. [Google Scholar] [CrossRef]
- Lehman, J.; Miikkulainen, R. Extinction Events Can Accelerate Evolution. PLoS ONE 2015, 10, e0132886. [Google Scholar] [CrossRef]
- Och, L.M.; Shields-Zhou, G.A. The Neoproterozoic oxygenation event: Environmental perturbations and biogeochemical cycling. Earth-Science Rev. 2012, 110, 26–57. [Google Scholar] [CrossRef]
- Rastrigin, L.A. Systems of Extremal Control; Nauka: Moscow, Russia, 1974. [Google Scholar]
- Available online: https://github.com/RafalKieszek/GEGA (accessed on 28 November 2022).
- Chakraborty, S.; Saha, A.K.; Sharma, S.; Mirjalili, S.; Chakraborty, R. A novel enhanced whale optimization algorithm for global optimization. Comput. Ind. Eng. 2021, 153, 107086. [Google Scholar] [CrossRef]
- Wu, X.; Wang, Z. Multi-objective optimal allocation of regional water resources based on slime mould algorithm. J. Supercomput. 2022, 78, 18288–18317. [Google Scholar] [CrossRef]
- Gad, A.G.; Sallam, K.M.; Chakrabortty, R.K.; Ryan, M.J.; Abohany, A.A. An improved binary sparrow search algorithm for feature selection in data classification. Neural Comput. Appl. 2022, 34, 15705–15752. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Point and Value of Minimum of the Function | Arithmetic Mean | |||||
|---|---|---|---|---|---|---|---|
| Classic GA | GEGA | WOA | SSA | SMA | |||
| Rastrigin | 10 | 9.96 | 9.98 | 9.72 | 9.95 | 9.85 | |
| 10 | 10.10 | 10.04 | 9.90 | 10.02 | 9.71 | ||
| 0 | 7.65 | 0.24 | 5.69 | 1.77 | 1.44 | ||
| Eggholder | 512 | 356 | 387 | 407 | 429 | 427 | |
| 404.2319 | 343 | 405 | 432 | 406 | 411 | ||
| −959.6407 | −610 | −833 | −876 | −870 | −872 | ||
| Function | Point and value of minimum of the function | Standard deviation | |||||
| Classic GA | GEGA | WOA | SSA | SMA | |||
| Rastrigin | 1.63 | 1.63 | 0.34 | 1.47 | 0.88 | 0.97 | |
| 1.85 | 1.85 | 0.34 | 1.59 | 0.90 | 0.91 | ||
| 7.17 | 7.17 | 0.47 | 4.94 | 1.59 | 2.70 | ||
| Eggholder | 131 | 131 | 97 | 103 | 95 | 99 | |
| 132 | 132 | 110 | 97 | 106 | 104 | ||
| 183 | 183 | 163 | 129 | 141 | 141 | ||
| GA | GEGA | Δ [%] | |
|---|---|---|---|
| Time (s) | 40.30 | 5.67 | 85.94 |
| Medium Mass (kg) | 1.062 | 1.066 | −0.301 |
| Minimum Mass (kg) | 1.058 | 1.059 | −0.057 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kieszek, R.; Kachel, S.; Kozakiewicz, A. Modification of Genetic Algorithm Based on Extinction Events and Migration. Appl. Sci. 2023, 13, 5584. https://doi.org/10.3390/app13095584
Kieszek R, Kachel S, Kozakiewicz A. Modification of Genetic Algorithm Based on Extinction Events and Migration. Applied Sciences. 2023; 13(9):5584. https://doi.org/10.3390/app13095584
Chicago/Turabian StyleKieszek, Rafał, Stanisław Kachel, and Adam Kozakiewicz. 2023. "Modification of Genetic Algorithm Based on Extinction Events and Migration" Applied Sciences 13, no. 9: 5584. https://doi.org/10.3390/app13095584