
A Novel Active Noise Control Method Based on Variational Mode Decomposition and Gradient Boosting Decision Tree


Abstract
:1. Introduction
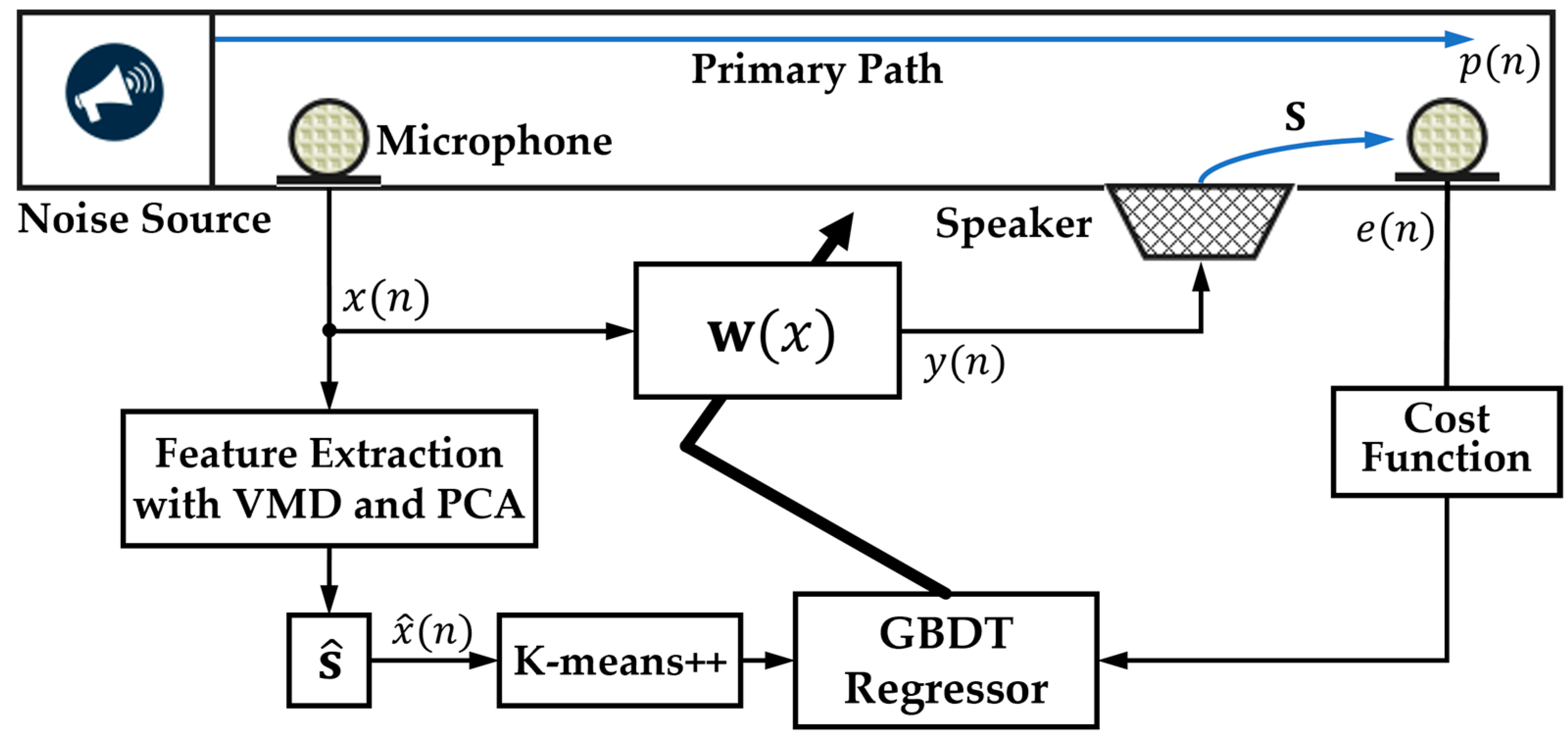
2. ANC Method Based on VMD and GBDT
2.1. Preliminaries
2.2. Feature Extraction with VMD
2.3. Construction of GBDT for ANC
3. Numerical Simulation
4. Results and Discussion
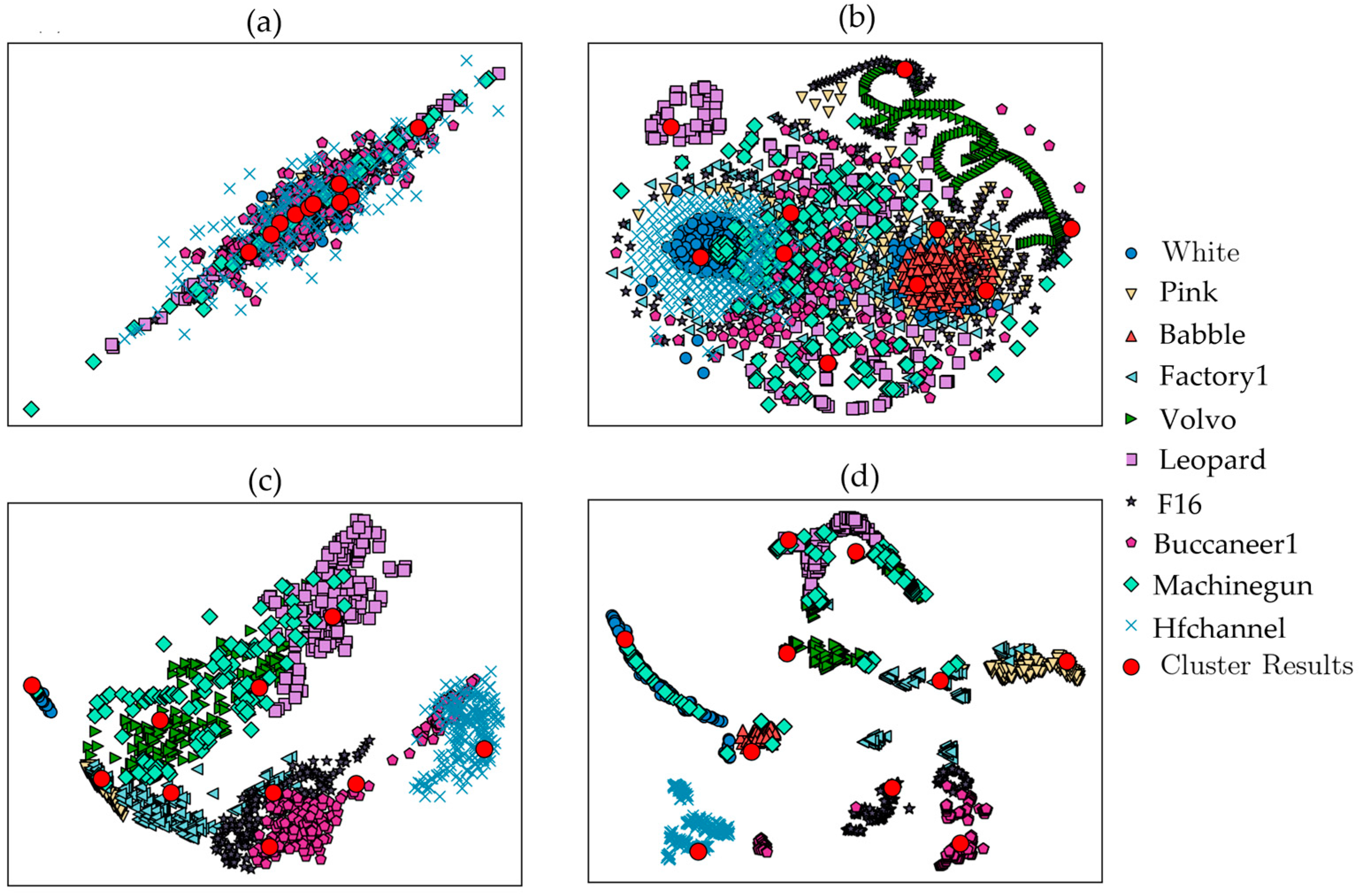
4.1. Clustering Result of Noise Data Set
- V-measure indicates the harmonic mean of completeness and homogeneity. It is used to express the linear dependency between the cluster number and the sample number;
- Rand Index (RI) is the indicator to evaluate the similarity of two clusters;
- Adjusted Rand Index (ARI) is the improved version of RI, which is used to eliminate the influences of random label on RI;
- Normalized Mutual Information (NMI) is the normalized evaluation indicator to quantify the similarity between two clusters;
- Adjust Mutual Information (AMI) reflects the correlation between the cluster label and the ground truth label. It can be used for the consistency test of the clustering algorithm.
- (a) K-means++ for raw noise data: the k-means++ algorithm was directly performed on the raw noise dataset;
- (b) K-means++ for raw noise data with PCA: clustering analysis was performed with K-means++ algorithm for the noise data after PCA dimension reduction;
- (c) K-means++ for raw noise data with VMD: clustering analysis was performed with K-means++ algorithm for noise data after VMD feature extraction;
- (d) K-means++ for raw noise data with VMD/PCA: features of original noise data were extracted with VMD and PCA first and the clustering analysis was performed with K-means++.
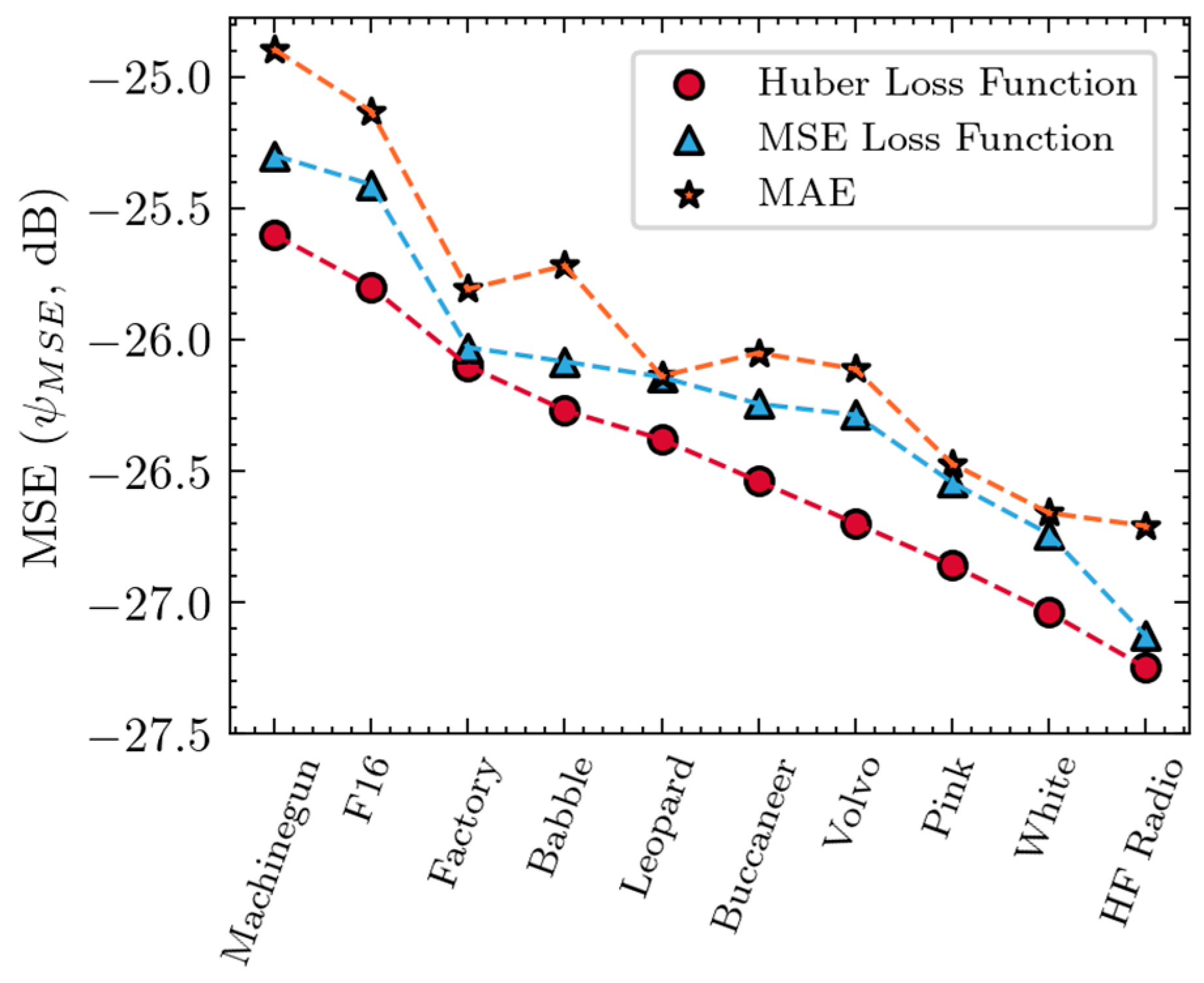
4.2. Architecture Determination and Regression Performance of GBDT
4.3. Comparison between Proposed Method with Several Other Methods
4.4. Simulation Validation of Proposed Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 22, 531–534. [Google Scholar] [CrossRef]
- Li, G.H.; Liu, F.; Yang, H. Research on feature extraction method of ship radiated noise with K-nearest neighbor mutual information variational mode decomposition, neural network estimation time entropy and self-organizing map neural network. Measurement 2022, 199, 111446. [Google Scholar] [CrossRef]
- Yang, H.; Shi, W.S.; Li, G.H. Underwater acoustic signal denoising model based on secondary variational mode decomposition. Def. Technol. 2022, 3. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, J.T.; Li, G.; Chen, W.J. Audio magnetotelluric denoising via variational mode decomposition and adaptive dictionary learning. J. Appl. Geophys. 2022, 204, 104748. [Google Scholar] [CrossRef]
- Wu, G.N.; Liu, G.C.; Wang, J.X.; Fan, P.P. Seismic random noise denoising using mini-batch multivariate variational mode decomposition. Comput. Intell. Neurosci. 2022, 2022, 2132732. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Zhang, B.; Lin, T.F.; Li, F.Y.; Liu, N.H. White noise attenuation of seismic trace by integrating variational mode decomposition with convolutional neural network. Geophysics 2019, 84, 307–317. [Google Scholar] [CrossRef]
- Wei, H.R.; Qi, T.Y.; Feng, G.R.; Jiang, H.N. Comparative research on noise reduction of transient electromagnetic signals based on empirical mode decomposition and variational mode decomposition. Radio Sci. 2021, 56, 1–19. [Google Scholar] [CrossRef]
- Mohanmmed, A.; Kora, R. A comprehensive review on ensemble deep learning: Opportunities and challenges. J. King Saud Univ. Comput. Inf. Sci. 2023, 35, 757–774. [Google Scholar] [CrossRef]
- Kumarasamy, K.; Wenisch, S.M.; Balaji, S.; Suriya, L.J.J.; Jerlin, A.; Rajkumar, S.R. Improving impulse noise classification using ensemble learning methods. Adv. Intell. Syst. Comput. 2021, 1299, 187–199. [Google Scholar] [CrossRef]
- Campagner, A.; Ciucci, D.; Cabitza, F. Aggregation models in ensemble learning: A large-scale comparison. Inf. Fusion 2023, 90, 241–252. [Google Scholar] [CrossRef]
- Nguyen, T.N.A.; Nhu, Q.P.; Solanki, V.K. Novel noise filter techniques and dynamic ensemble selection for classification. Recent Adv. Comput. Sci. Commun. 2022, 15, 48–59. [Google Scholar] [CrossRef]
- Ngo, G.; Beard, R.; Chandra, R. Evolutionary bagging for ensemble learning. Neurocomputing 2022, 510, e2020RS007135. [Google Scholar] [CrossRef]
- Fauvel, K.; Fromont, É.; Masson, V.; Faverdin, P.; Termier, A. XEM: An explainable-by-design ensemble method for multivariate time series classification. Data Min. Knowl. Discov. 2022, 36, 917–957. [Google Scholar] [CrossRef]
- González, S.; García, S.; Del Ser, J.; Rokach, L.; Herrera, F. A practical tutorial on bagging and boosting based ensembles for machine learning: Algorithms, software tools, performance study, practical perspectives and opportunities. Inf. Fusion 2020, 64, 205–237. [Google Scholar] [CrossRef]
- Konstantinov, A.V.; Utkin, L.V. Interpretable machine learning with an ensemble of gradient boosting machines. Knowl.-Based Syst. 2021, 222, 106993. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Nhat-Duc, H.; Van-Duc, T. Comparison of histogram-based gradient boosting classification machine, random Forest, and deep convolutional neural network for pavement raveling severity classification. Autom. Constr. 2023, 148, 104767. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. LightGBM: A highly efficient gradient boosting decision tree. Adv. Neural Inf. Process. Syst. 2017, 30, 3149–3157. [Google Scholar]
- Patri, A.; Patnaik, Y. Random forest and stochastic gradient tree boosting based approach for the prediction of airfoil self-noise. Proc. Comput. Sci. 2014, 46, 109–121. [Google Scholar] [CrossRef]
- Li, L.; Dai, S.; Cao, Z.; Hong, J.; Jiang, S.; Yang, K. Using improved gradient-boosted decision tree algorithm based on Kalman filter (GBDT-KF) in time series prediction. J. Supercomput. 2020, 76, 6887–6900. [Google Scholar] [CrossRef]
- Wu, S.L.; Wang, B.F.; Zhao, L.X.; Liu, H.S.; Geng, J.H. High-efficiency and high-precision seismic trace interpolation for irregularly spatial sampled data by combining an extreme gradient boosting decision tree and principal component analysis. Geophys. Prospect. 2022, 20224713147273. [Google Scholar] [CrossRef]
- Yentes, J.M.; Hunt, N.; Schmid, K.K.; Kaipust, J.P.; McGrath, D.; Stergiou, N. The appropriate use of approximate entropy and sample entropy with short data sets. Ann. Biomed. Eng. 2013, 41, 349–365. [Google Scholar] [CrossRef] [PubMed]
- Trendafilov, N.; Gallo, M. PCA and other dimensionality-reduction techniques. In International Encyclopedia of Education, 4th ed.; Elsevier: Amsterdam, The Netherlands, 2023; pp. 509–599. [Google Scholar] [CrossRef]
- Vinh, N.X.; Epps, J.L.; Bailey, J. Information theoretic measures for clusterings comparison: Variants, properties, normalization and correction for chance. J. Mach. Learn. Res. 2010, 11, 2837–2854. [Google Scholar]
- Varga, A.; Steeneken, H.J.M. Assessment for automatic speech recognition: II. NOISEX-92: A database and an experiment to study the effect of additive noise on speech recognition systems. Speech Commun. 1993, 3, 247–251. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Yang, Z.J.; Lu, H.M.; Zhou, X.X.; Phillips, P.; Liu, Q.M.; Wang, S.H. Facial emotion recognition based on biorthogonal wavelet entropy, fuzzy support vector machine, and stratified cross validation. IEEE Access 2016, 4, 8375–8385. [Google Scholar] [CrossRef]
- Scheibler, R.; Bezzam, E.; Dokmanic, I. Pyroomacoustics: A Python package for audio room simulations and array processing algorithms. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018. [Google Scholar] [CrossRef]
- Chu, Y.J.; Zhao, S.P.; He, L.B.; Niu, F. Wind noise suppression in filtered-x least mean squares-based active noise control systems. J. Acoust. Soc. Am. 2022, 152, 3340–3345. [Google Scholar] [CrossRef]
- Wu, L.F.; Qiu, X.J.; Burnett, L.S.; Guo, Y.C. A recursive least square algorithm for active control of mixed noise. J. Sound Vib. 2015, 339, 1–10. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure Parameters | Loss Function | Estimators Number | Maximum Depth |
|---|---|---|---|
| Optimal Parameters | Huber | 500 | 4 |
| Center Frequency (Hz) | 125 | 250 | 500 | 1000 | 2000 | 4000 | 8000 |
| Absorption | 0.02 | 0.03 | 0.03 | 0.03 | 0.004 | 0.07 | 0.07 |
| Scattering | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.6 | 0.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Yao, J.; Luo, L.; Zhang, W.; Wang, Y. A Novel Active Noise Control Method Based on Variational Mode Decomposition and Gradient Boosting Decision Tree. Appl. Sci. 2023, 13, 5436. https://doi.org/10.3390/app13095436
Liang X, Yao J, Luo L, Zhang W, Wang Y. A Novel Active Noise Control Method Based on Variational Mode Decomposition and Gradient Boosting Decision Tree. Applied Sciences. 2023; 13(9):5436. https://doi.org/10.3390/app13095436
Chicago/Turabian StyleLiang, Xiaobei, Jinyong Yao, Lei Luo, Weifang Zhang, and Yanrong Wang. 2023. "A Novel Active Noise Control Method Based on Variational Mode Decomposition and Gradient Boosting Decision Tree" Applied Sciences 13, no. 9: 5436. https://doi.org/10.3390/app13095436