

Structure Optimization and Control Design of Electronic Oxygen Regulator

Abstract
:1. Introduction
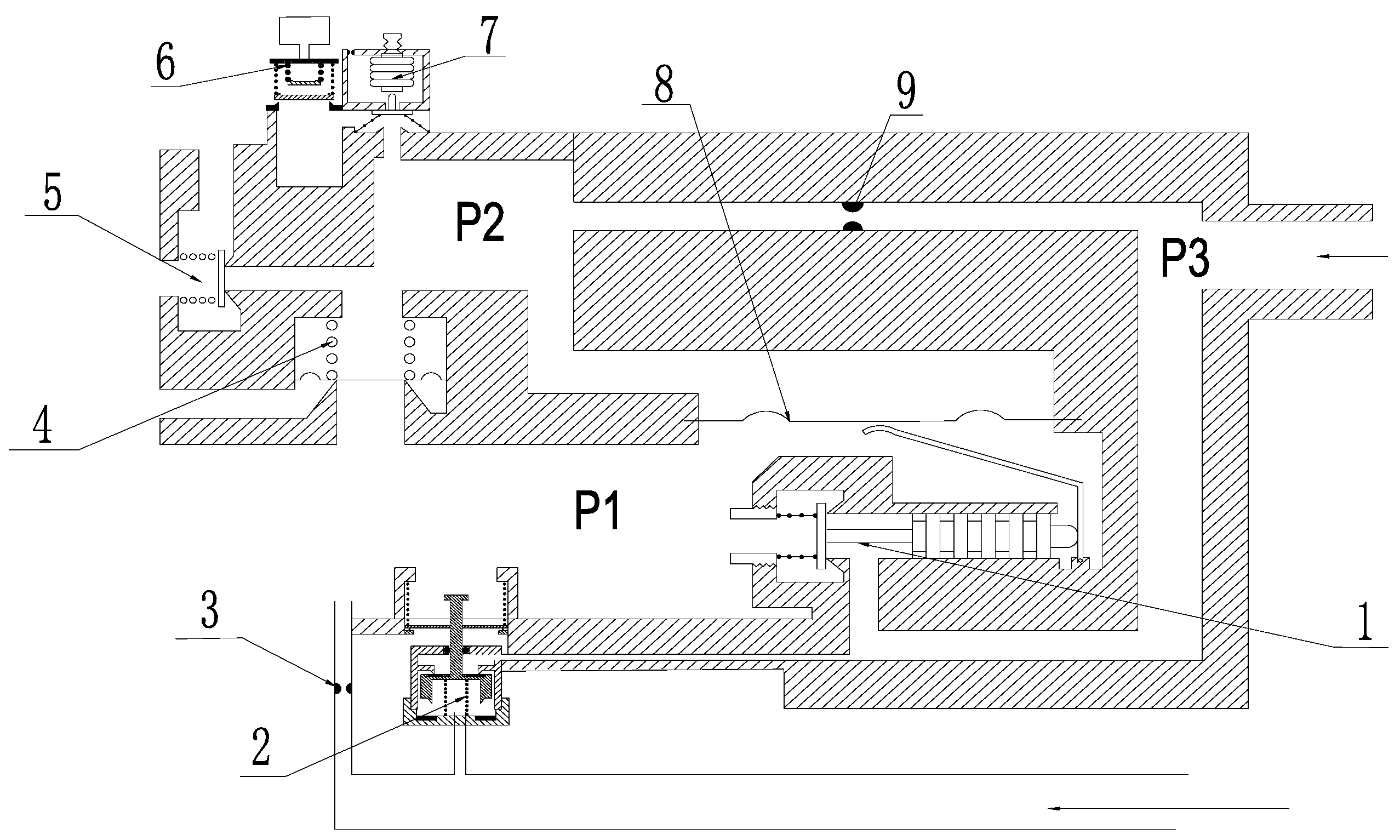
2. Oxygen Regulator Principle Analysis
2.1. Indirect Oxygen Regulator Principle
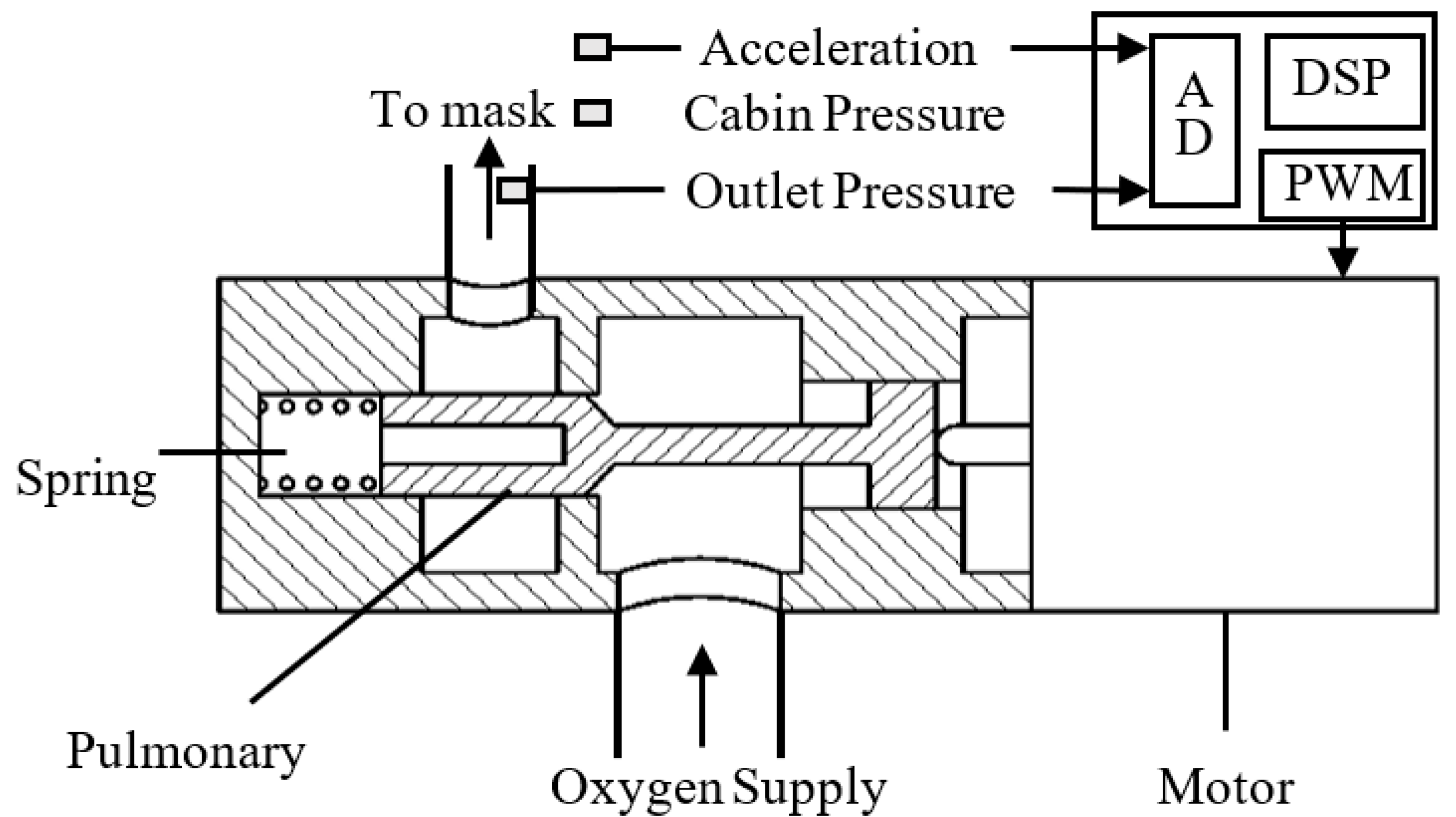
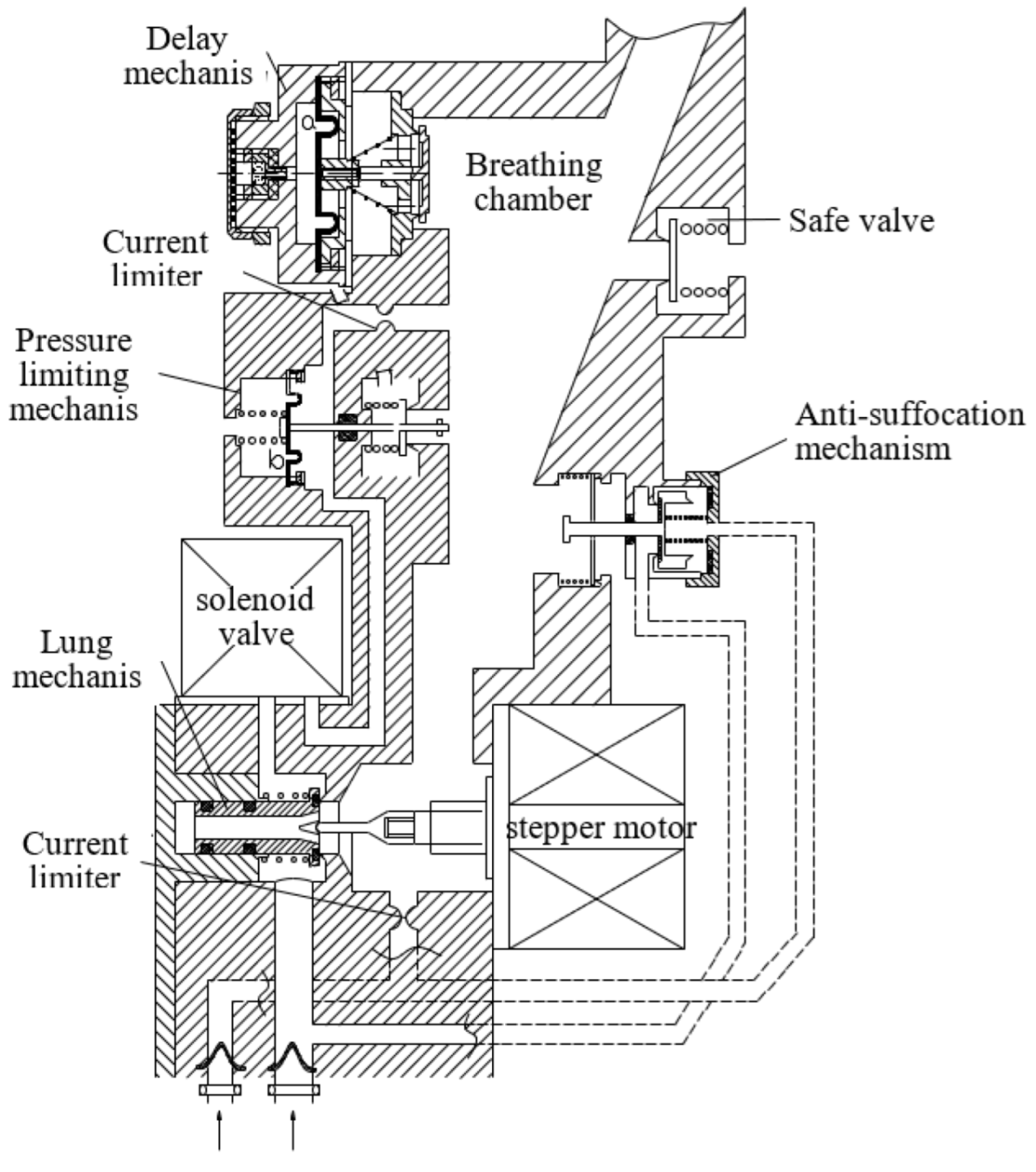
2.2. Optimized Design
3. Control Method Design
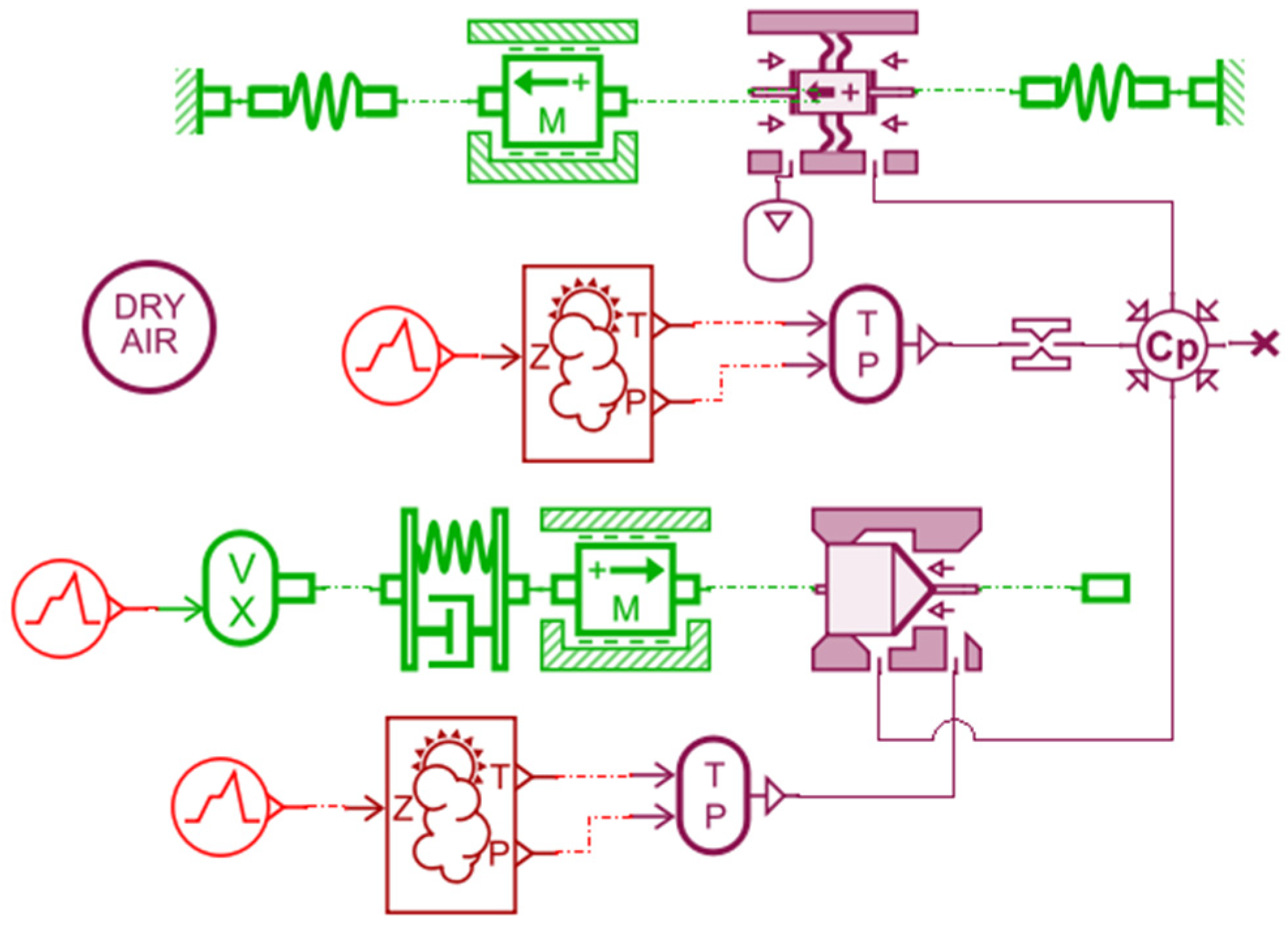
3.1. Mathematical Modeling
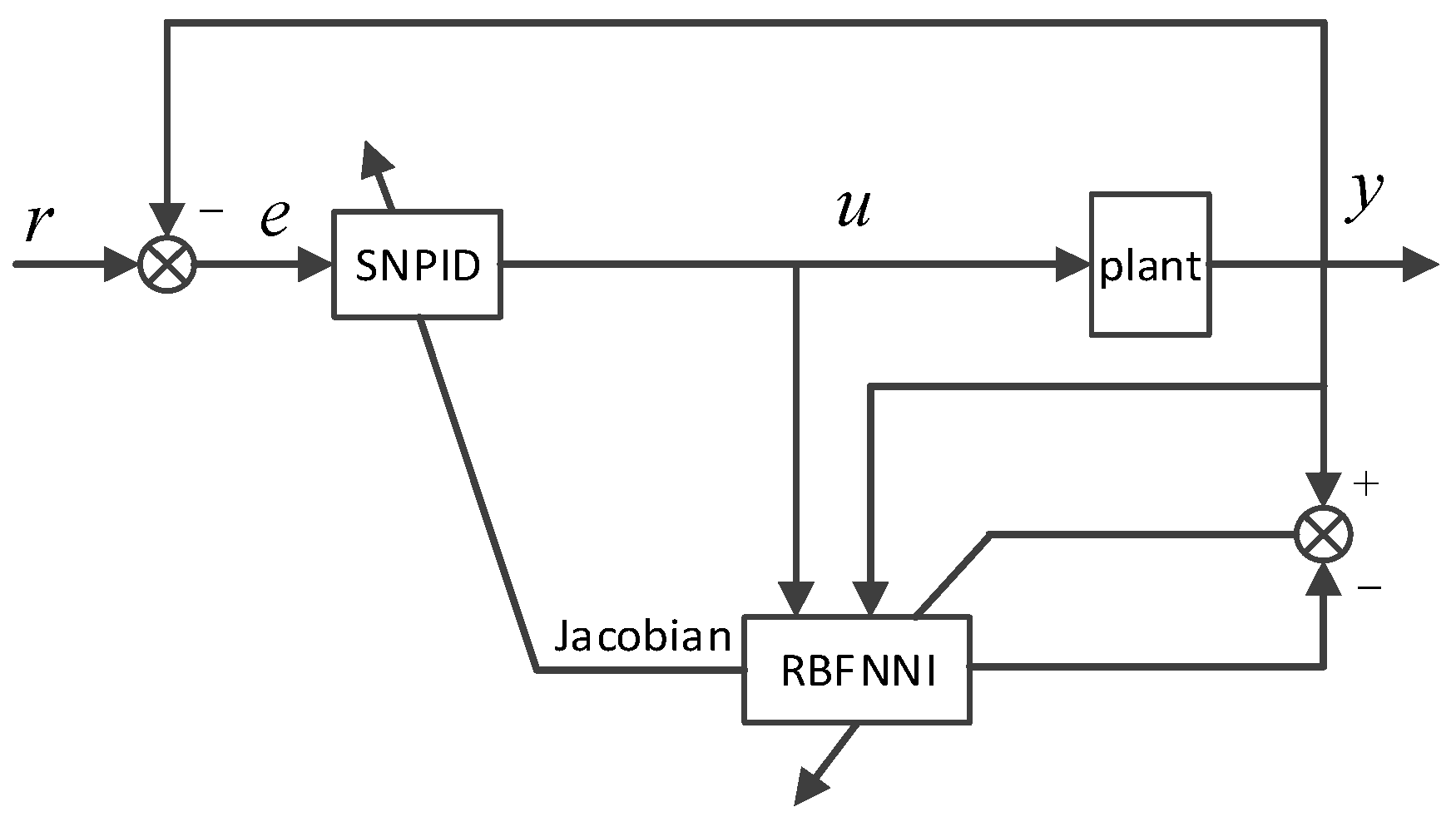
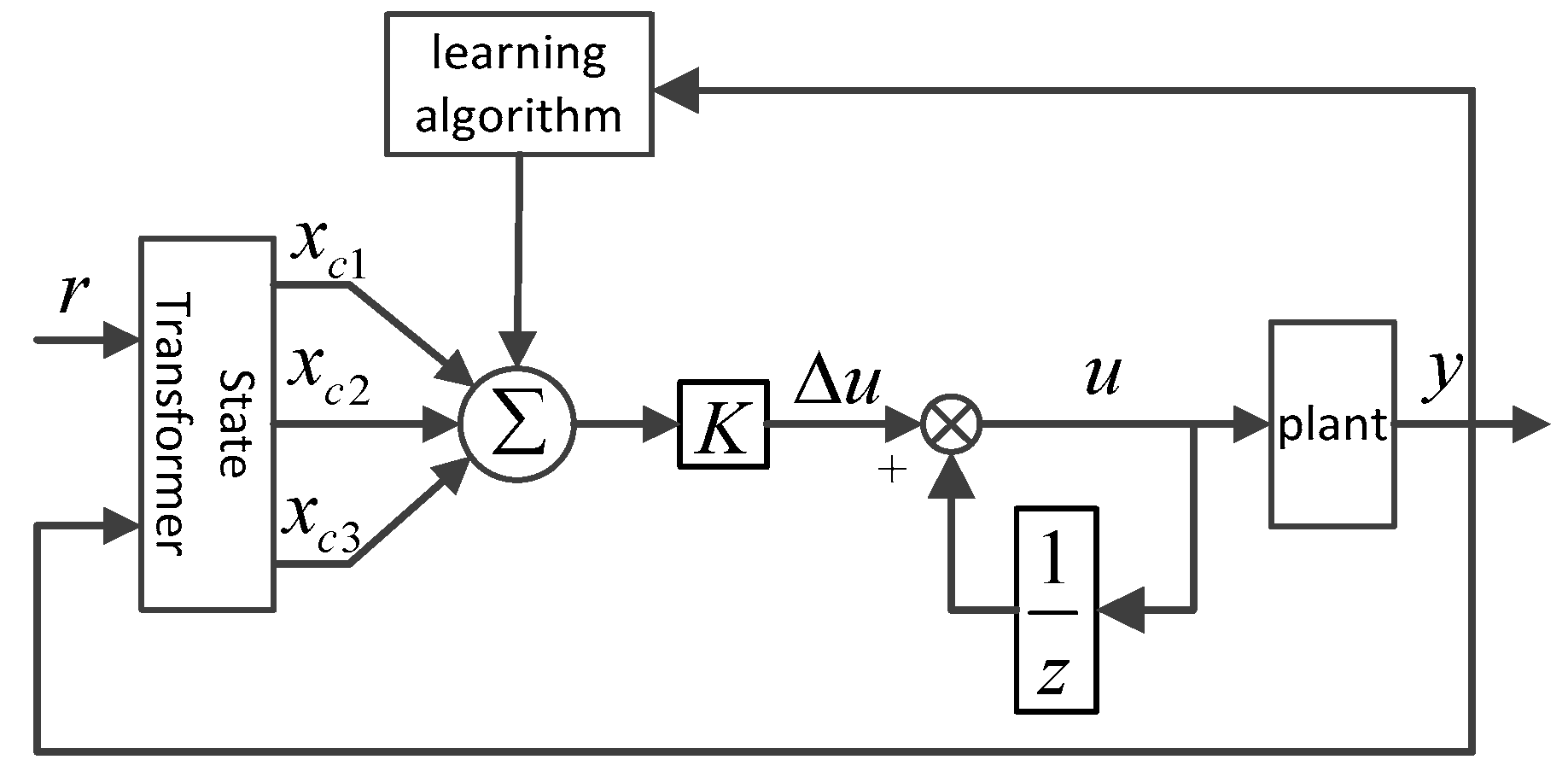
3.2. Controller Design
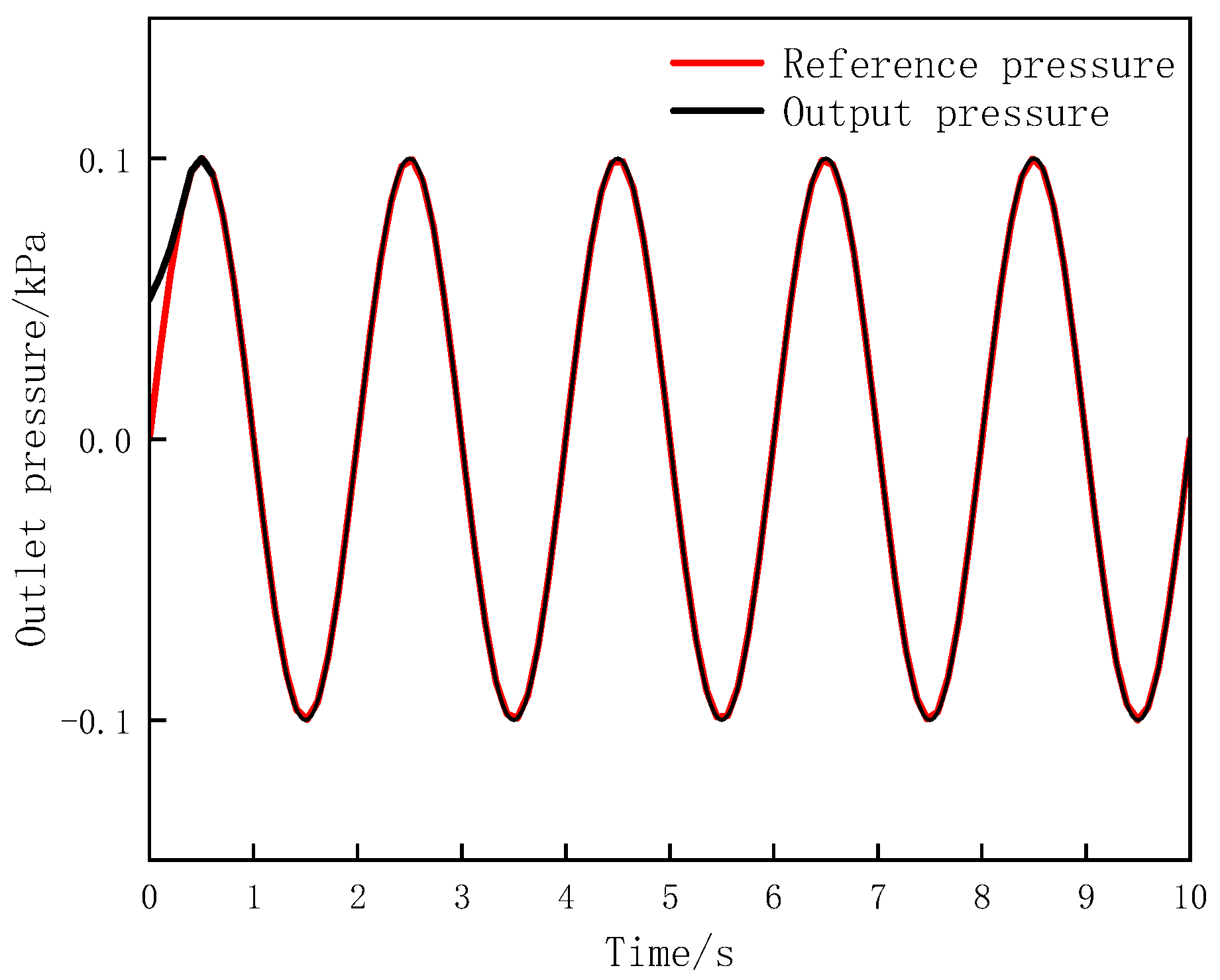
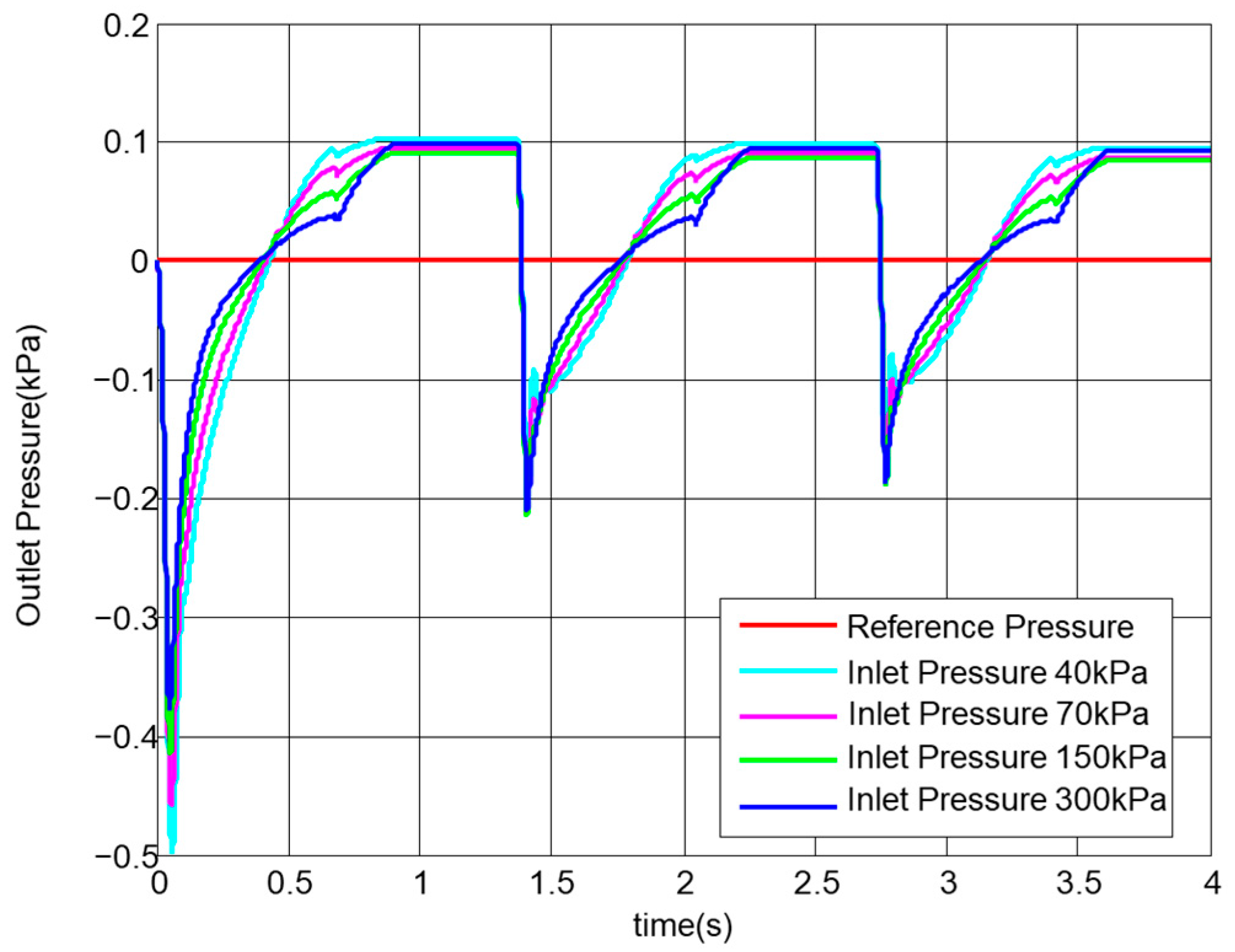
3.3. Simulation Results
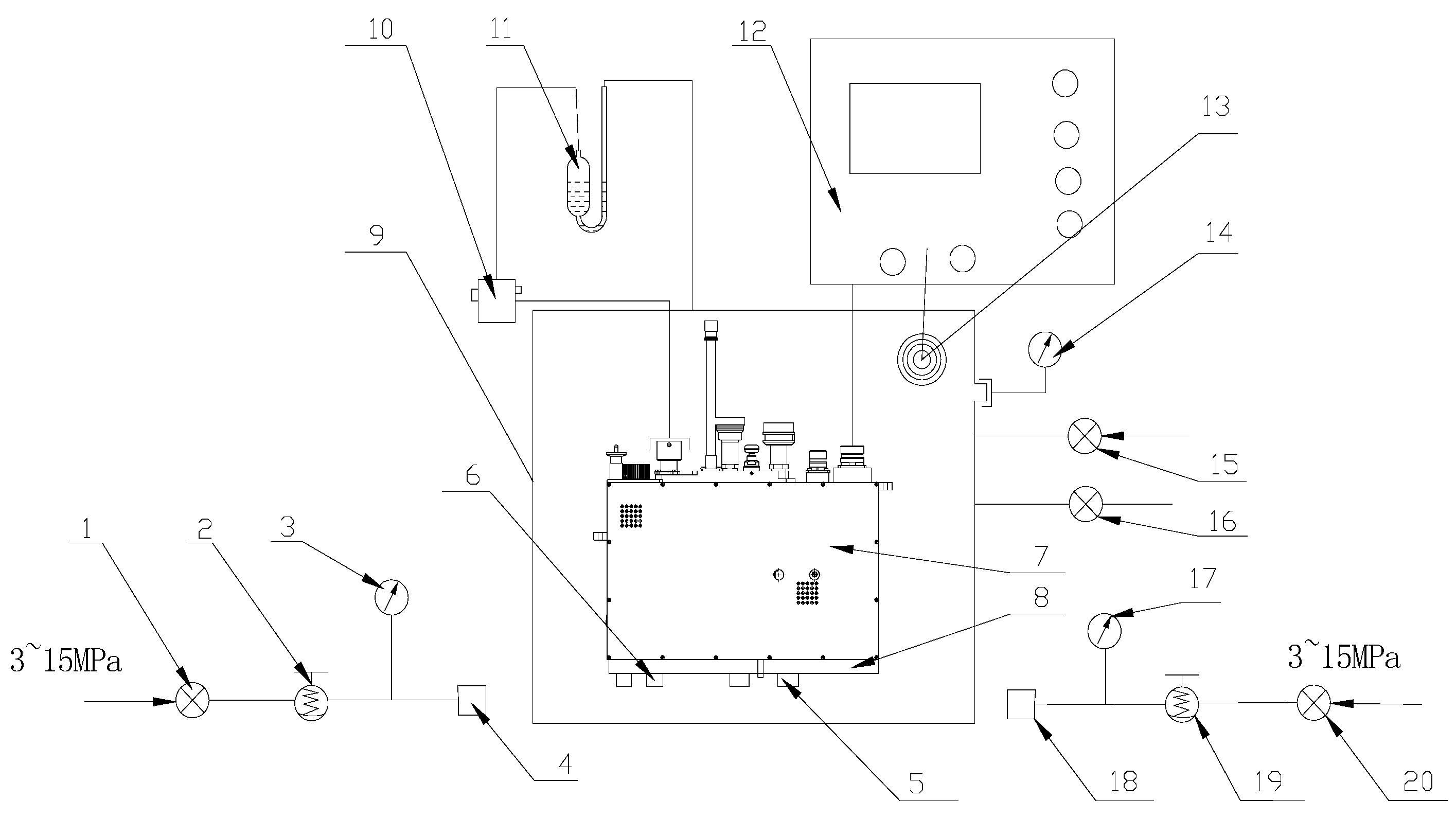
4. Experimental Analysis
4.1. Experimental Projects
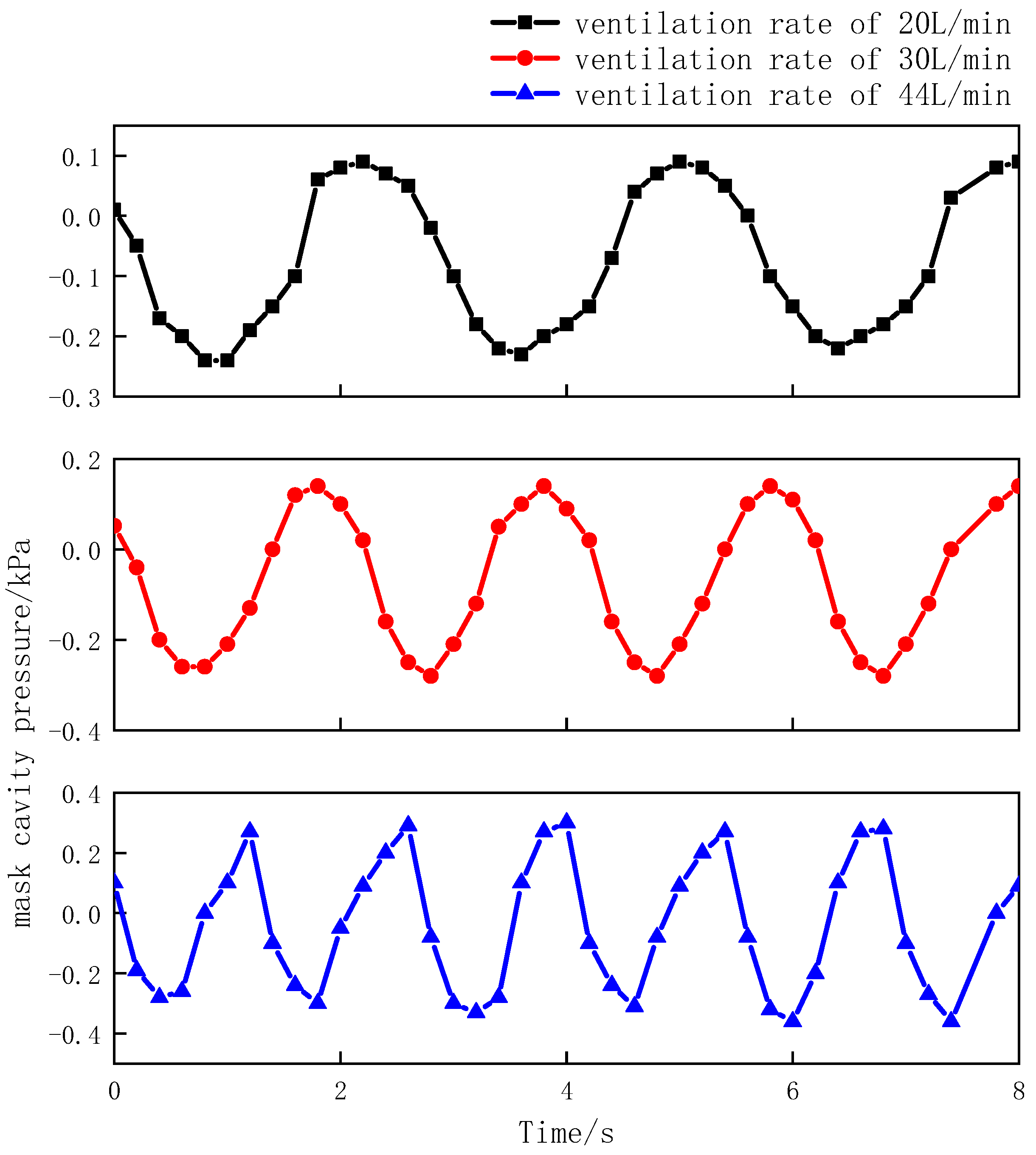
- Breathing resistance test
- 2.
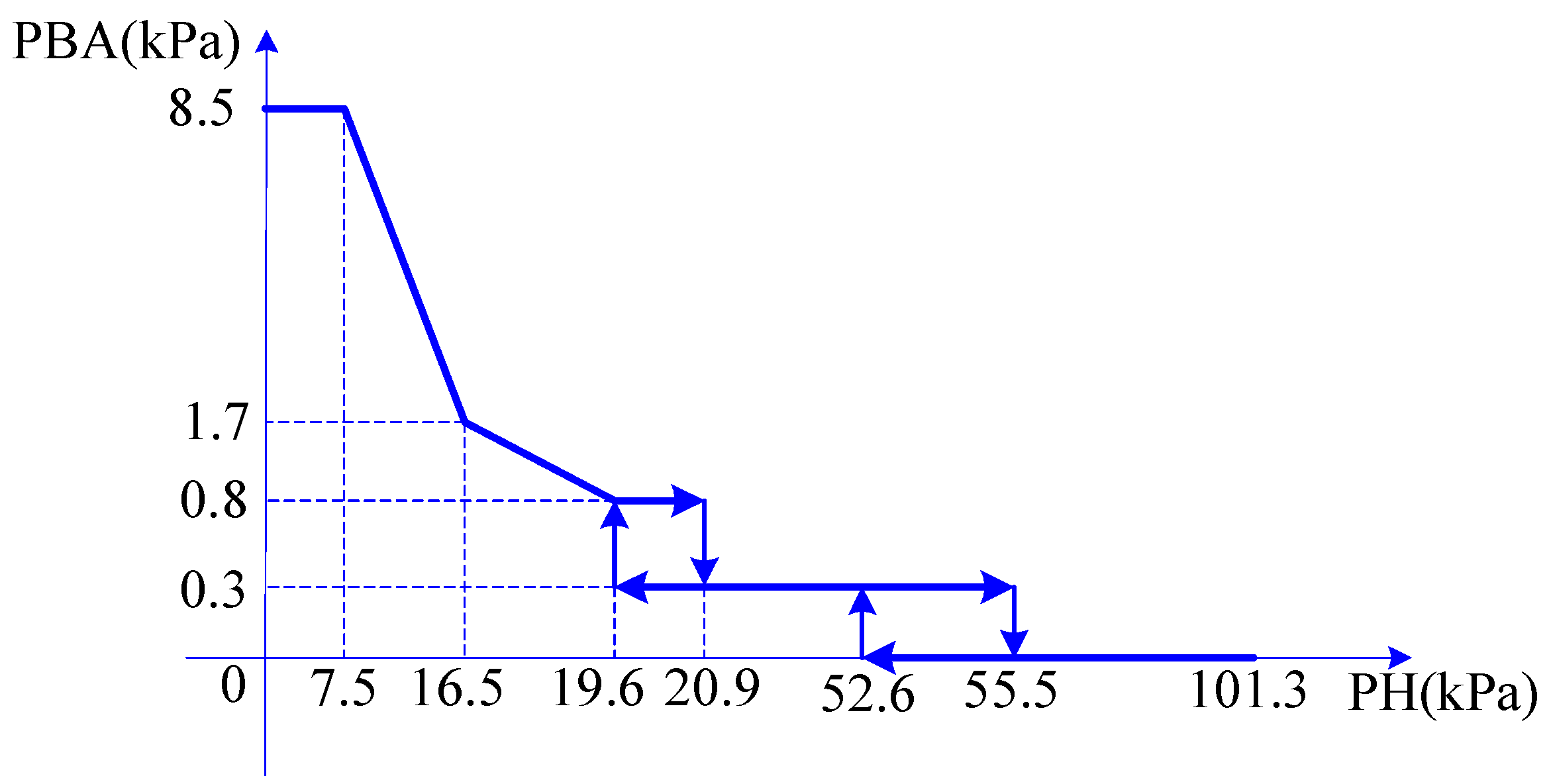
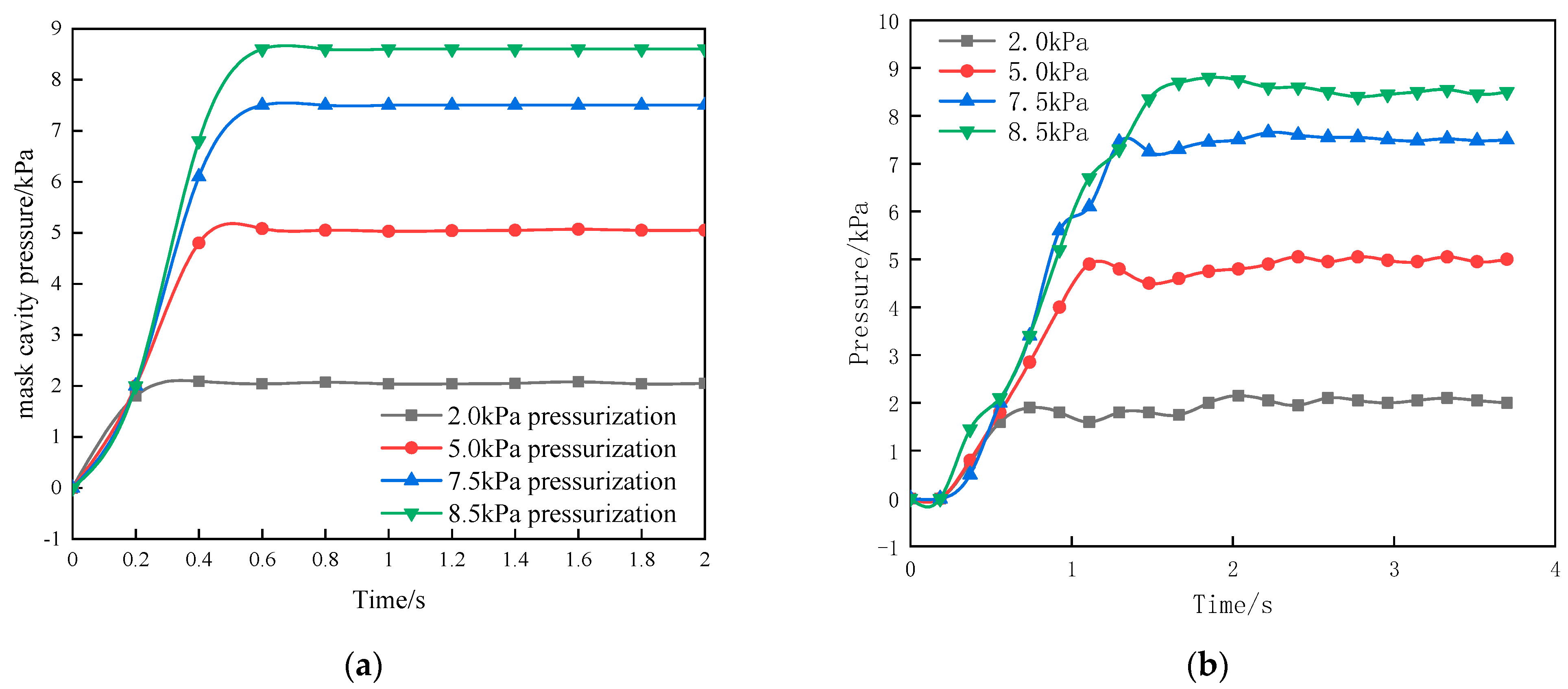
- Pressurization test
4.2. Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fan, Y.; Sun, Q.; Dong, F.; Chen, Q. An adaptive oxygen regulator control system based on particle swarm optimization and back propagation neural network. Control Theory Appl. 2020, 3, 687–695. [Google Scholar]
- Siska, W.D., Jr.; Robert, C. Electromechanical Oxygen Valve and Regulator. U.S. Patent No. 7,677,529, 16 March 2021. [Google Scholar]
- Yan, S.H.I.; Yixuan, W.A.N.G.; Maolin, C.A.I.; Zhang, B.; Jian, Z.H.U. An aviation oxygen supply system based on a mechanical ventilation model. Chin. J. Aeronaut. 2018, 31, 197–204. [Google Scholar]
- Jiang, D.; Bu, X.; Lin, G.; Sun, B.; Huang, J.; Fang, L.; Zhao, H. Control design and experimental verification of three-bed airborne oxygen generation system. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 6. [Google Scholar]
- Li, X.; Lin, G.; Zeng, Y.; Wu, F. Design of electronic oxygen regulator PID control system based on LabVIEW. Comput. Meas. Control 2016, 3, 80–83. [Google Scholar]
- Jiang, Y.; Sun, Q.; Tan, P.; Chen, Z. Modeling and Simulation of an Electronic Oxygen Regulator Based on All-Coefficient Adaptive Control. J. Dyn. Syst. Meas. Control 2016, 138, 081010. [Google Scholar] [CrossRef]
- Yuxin, J.; Qinglin, S.; Zengqiang, C.; Sanpeng, D. Modeling and simulation of an electronic oxygen regulator based on generalized predictive control algorithm. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 4067–4072. [Google Scholar]
- Jiang, D.; Jin, H.; Sun, B.; Lin, G.; Bu, X.; Zhao, H. Design and experiment research of pressure control cavity on electronic oxygen regulator. In Proceedings of the 2017 8th International Conference on Mechanical and Aerospace Engineering (ICMAE), Prague, Czech Republic, 22–25 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 656–660. [Google Scholar]
- Wan, Y.; Zhao, J.; Zeng, Y. Design and calculation of structural parameters of aviation oxygen regulator. J. Beijing Univ. Aeronaut. Astronaut. 2011, 37, 351–354. [Google Scholar]
- Zou, N.; Zhang, B.; Wang, D.; Xiao, H.; Liu, X.; Zang, B. Performance parameter adjustment analysis and experimental verification of YTQ-7 oxygen regulator. Aerosp. Sci. Technol. 2011, 5, 45–48. [Google Scholar]
- Yu, X.; Sun, B.; Lin, G.; Wang, H. The application of ATmega128 single chip microcomputer in electronic oxygen regulator. Microcomput. Appl. 2009, 12, 50–56. [Google Scholar]
- Sun, C.; Cai, Y.; Long, H. Research on stepping motor fuzzy control technology application in the aircraft electronic oxygen regulator. Meas. Control Technol. 2013, 32, 78–81. [Google Scholar]
- Jiang, Y.; Sun, Q.; Zhang, X.; Chen, Z. Pressure regulation for oxygen mask based on active disturbance rejection control. IEEE Trans. Ind. Electron. 2017, 64, 6402–6411. [Google Scholar] [CrossRef]
- Morris-ward, M. Modification of Oxygen Regulator Functionality Tester for X-59 Regulator Testing. In Student Poster Day; NTRS—NASA Technical Reports Server: Washington, DC, USA, 2020. [Google Scholar]
- Pan, R.; Lin, G.; Shi, Z.; Zeng, Y.; Yang, X. Analysis and control optimization of positive pressure fluctuation in electromechanical oxygen regulator. Chin. J. Aeronaut. 2021, 34, 205–213. [Google Scholar] [CrossRef]
- Saha, B.K.; Songjing, L.I.; Xinbei, L.V. Analysis of pressure characteristics under laminar and turbulent flow states inside the pilot stage of a deflection flapper servo-valve: Mathematical modeling with CFD study and experimental validation. Chin. J. Aeronaut. 2020, 33, 1107–1118. [Google Scholar] [CrossRef]
- Pan, R.; Lin, G.; Shi, Z.; Zeng, Y.; Yang, X. The application of disturbance-observer-based control in breath pressure control of aviation electronic oxygen regulator. Energies 2021, 14, 5189. [Google Scholar] [CrossRef]
- Yinhu, L.; Shaoming, L. Single neuron PID control based on dynamic RBF neural network on-line identification. J. Syst. Simul. 2006, 18 (Suppl. 2), 804–807. [Google Scholar]
- Zhang, S.T.; Yang, F.; Hao, Q. Research and simulation of single neuron PID controller. Mech. Eng. Autom. 2009, 39, 69–70. [Google Scholar]
- Wang, N.; Tu, J.; Chen, J. Intelligent control using a single adaptive neuron. In Proceedings of the Third Congress of Chinese Association of Automation, Beijing, China; 1991; pp. 173–177. [Google Scholar]
- Liu, X.; Xiao, H.; Shi, Q. Evaluation of hypobaric chamber physiological test of YX-11 oxygen supply system. Chin. J. Aerosp. Med. 2007, 18, 20–25. [Google Scholar]
- Xiao, H. Review and Prospect of Physiological Research on Aviation Oxygen Supply Equipment. In Proceedings of the Academic Conference on Environmental Control and Ergonomics of Chinese Aviation Society, Beijing, China; 2000. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Spring stiffness (N/m) | 470 |
| Volume of chamber (cm3) | 13 |
| Diameter of hole (mm) | 10 |
| Diameter of poppet (mm) | 15 |
| Orifice area (mm2) | 0.1 |
| Parameter (Unit) | Value |
|---|---|
| m (kg) | 0.037 |
| K (N/m) | 700 |
| d (m) | 0.07 |
| Θ (º) | 11 |
| R (Ω) | 15 |
| Km (N/A) | 23 |
| KE (V/(m/s)) | 23 |
| V (m3) | 0.0005 |
| κ | 1.4 |
| Rg (m2/(s2·K)) | 260 |
| Cd | 0.8 |
| Ventilation Volume (L/min) | Expiratory Resistance (kPa) | Inspiratory Resistance (kPa) |
|---|---|---|
| 20 | ≤0.29 | ≤0.49 |
| 30 | ≤0.49 | ≤0.59 |
| 44 | ≤1.08 | ≤0.88 |
| Lung Ventilation (L/min) | Peak Inspiratory Resistance (kPa) |
|---|---|
| 20 | 0.49 |
| 30 | 0.59 |
| 44 | 0.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, D.; Liu, Y.; Yang, H.; Fang, X.; Qian, B.; Li, H. Structure Optimization and Control Design of Electronic Oxygen Regulator. Appl. Sci. 2023, 13, 5431. https://doi.org/10.3390/app13095431
Jiang D, Liu Y, Yang H, Fang X, Qian B, Li H. Structure Optimization and Control Design of Electronic Oxygen Regulator. Applied Sciences. 2023; 13(9):5431. https://doi.org/10.3390/app13095431
Chicago/Turabian StyleJiang, Dongsheng, Yue Liu, Haowen Yang, Xingxing Fang, Binbin Qian, and Hui Li. 2023. "Structure Optimization and Control Design of Electronic Oxygen Regulator" Applied Sciences 13, no. 9: 5431. https://doi.org/10.3390/app13095431