
Squat Detection and Estimation for Railway Switches and Crossings Utilising Unsupervised Machine Learning

Abstract
:1. Introduction
2. Materials and Methods
2.1. The Testbed and Experiment Setup
2.2. Sensors
2.3. Test Procedure and Data Acquisition
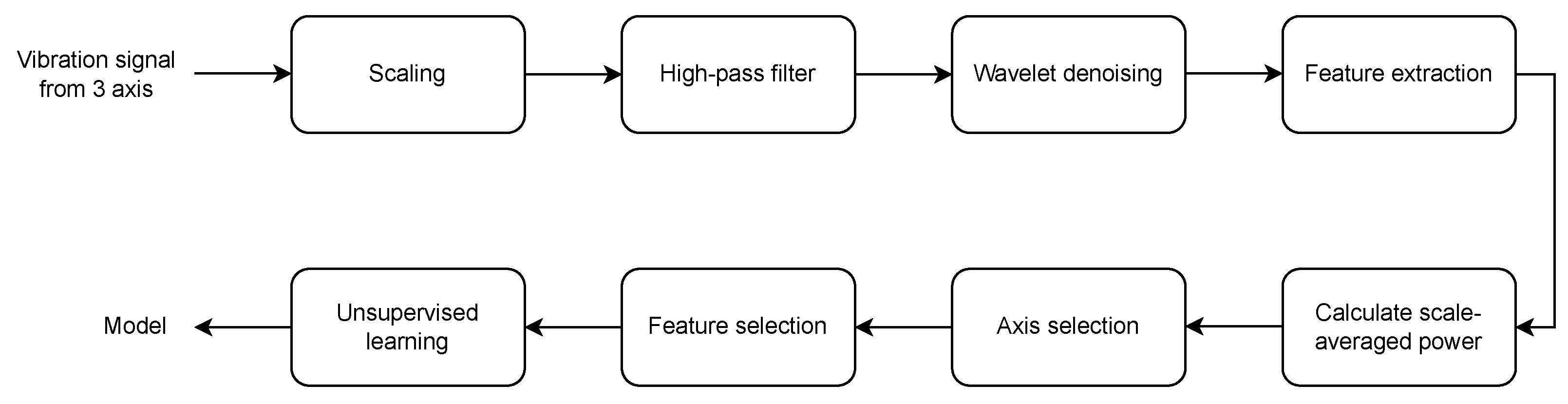
2.4. Data Processing Procedure
2.5. Wavelets
2.6. SAWP
2.7. Unsupervised Machine Learning
2.7.1. K-Means Clustering
2.7.2. DBSCAN Clustering
- Locate all the points within the radius of each point.
- Identify the core points that have at least minPts neighbours.
- Find all the core points’ connected components in the neighbour graph.
- Assign each non-core point to a cluster if it is within the neighbourhood of the cluster.
- Any remaining points are considered outliers or noise.
2.7.3. Agglomerative Hierarchical Clustering
- Assign each data point its own cluster.
- Compute the similarity information between every pair of clusters (dissimilarity or distance).
- Use a linkage function to group the data into new clusters recursively to build the hierarchical cluster tree, based on the similarity information achieved in the previous step.
- Determine where to cut the hierarchical tree into clusters.
3. Results and Discussion
3.1. Feature Extraction and Scaling
3.2. Axis Selection
3.3. Feature Selection
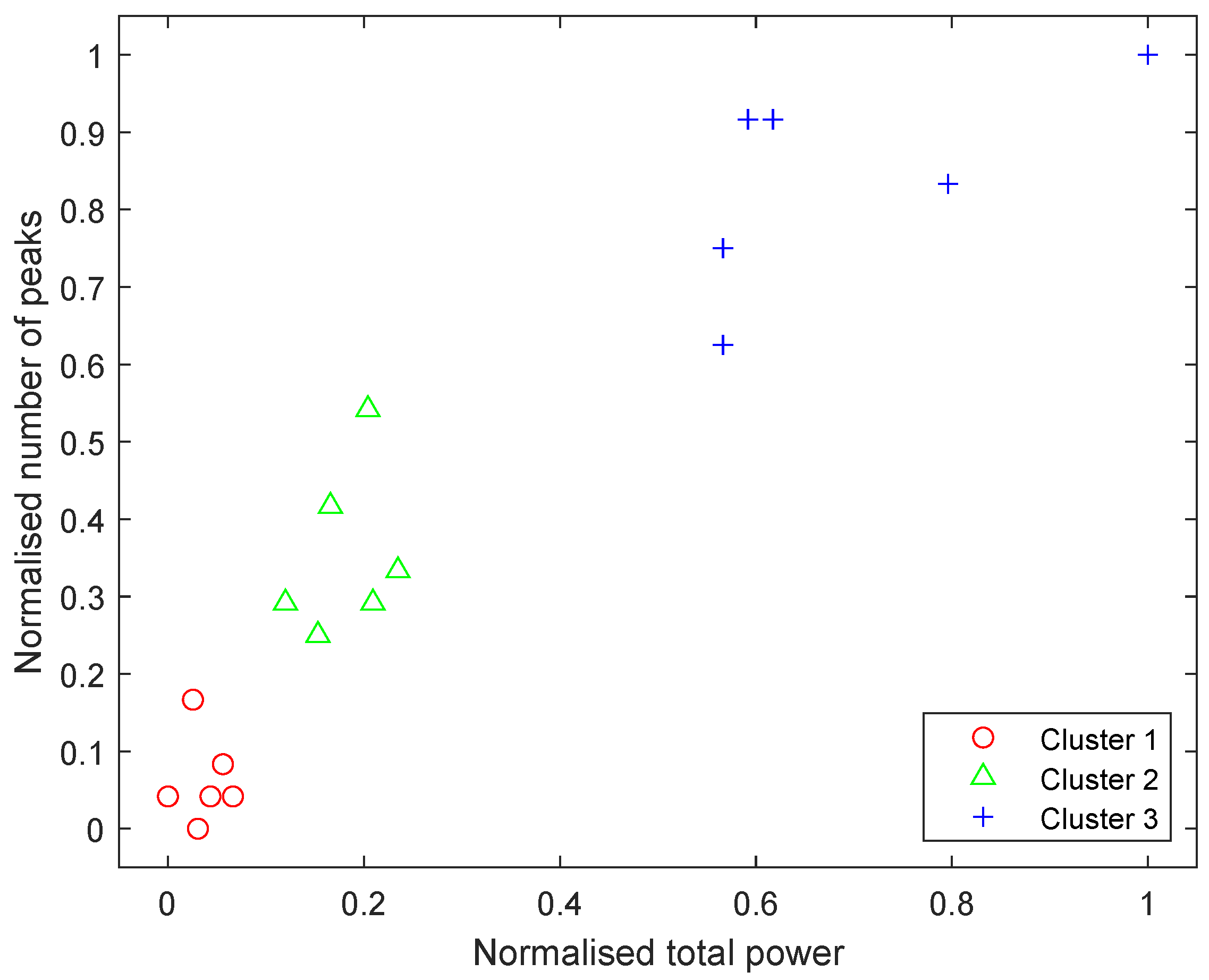
3.4. K-Means Clustering
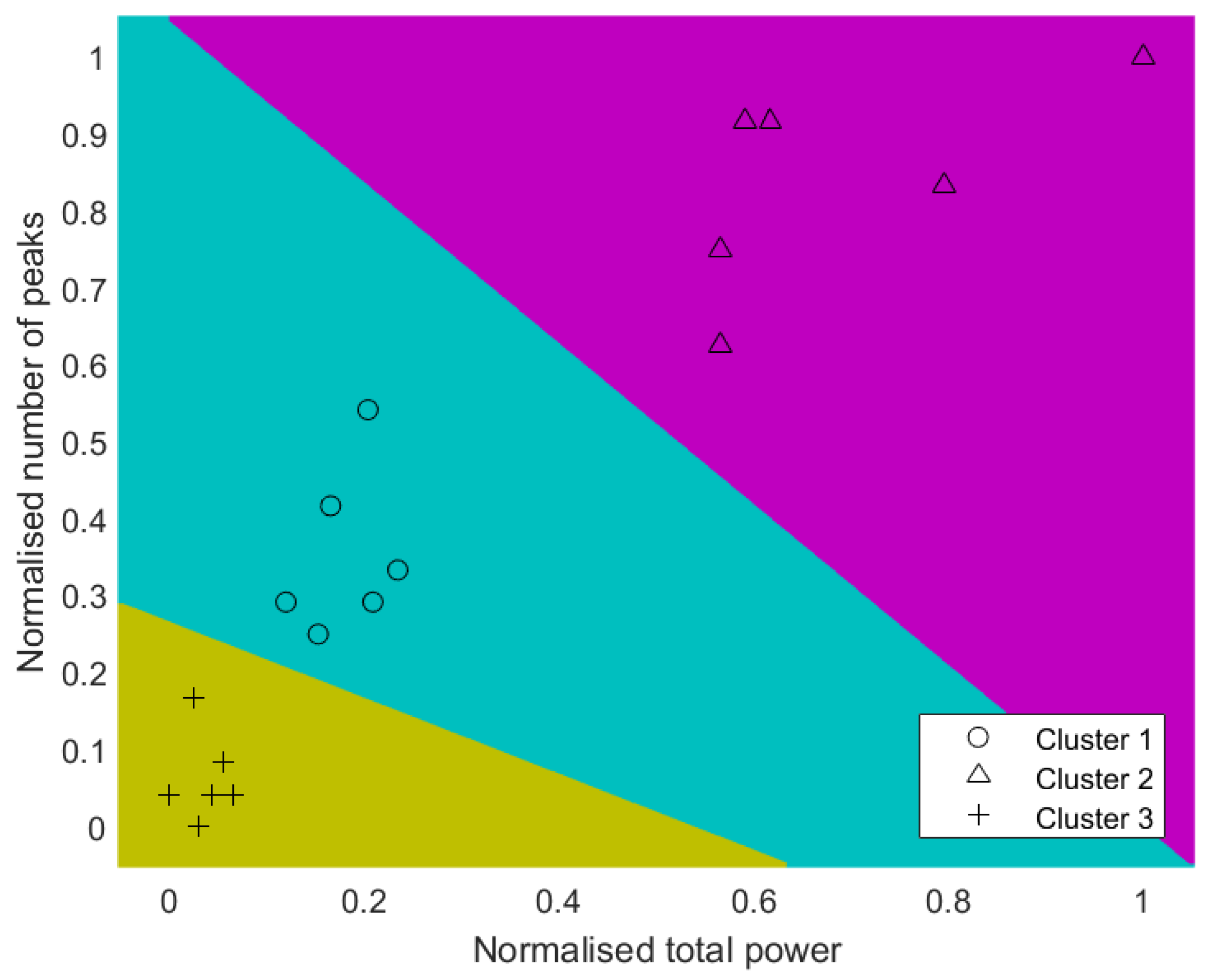
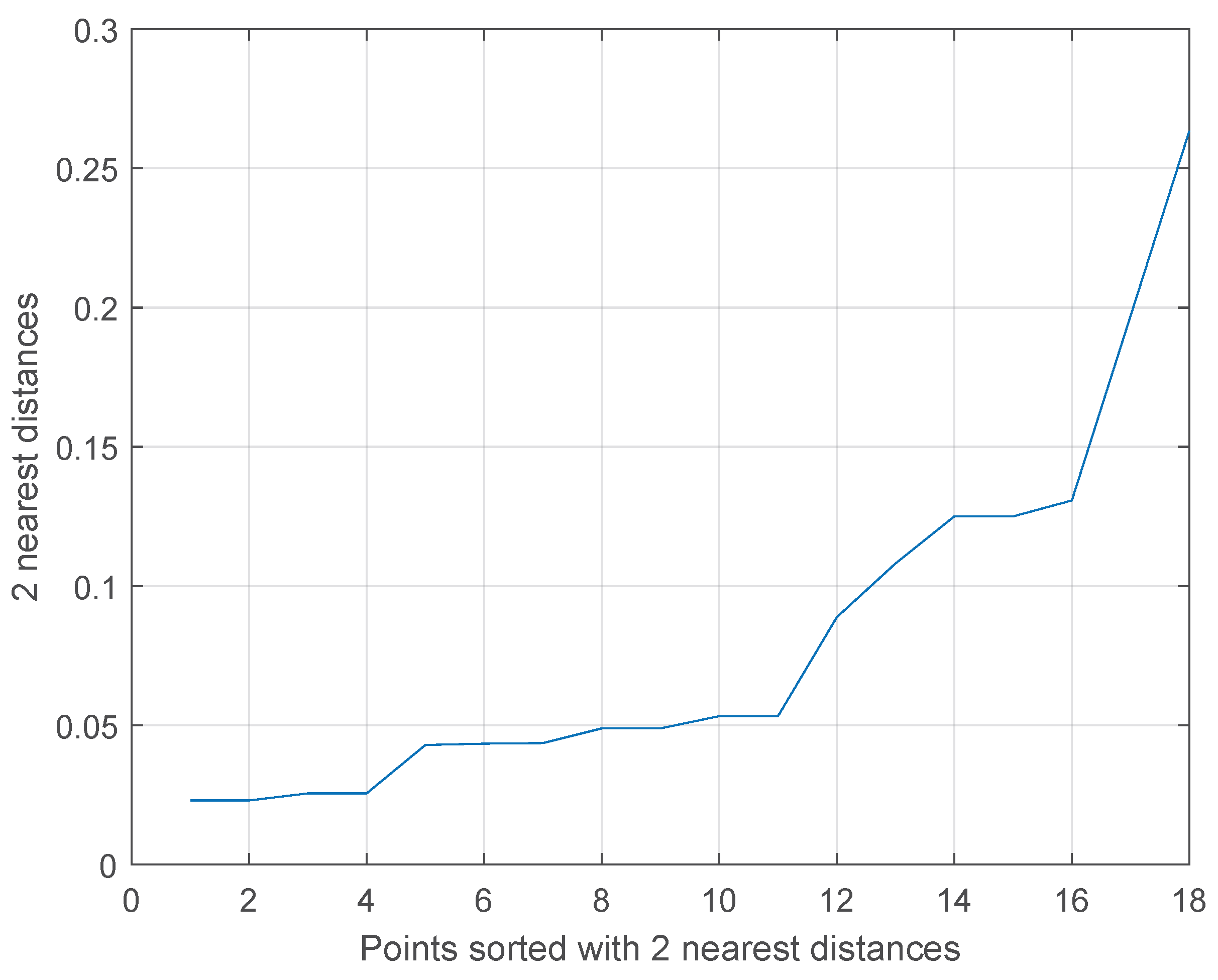
3.5. DBSCAN Clustering
3.6. Agglomerative Hierarchical Clustering
4. Conclusions and Future Works
- The presented signal processing method is effective and promising to extract useful information from the vibration signal.
- It is possible to only utilise features from SAWP from the vibration signal to identify different degrees of squat defects of the S&Cs.
- The number of peaks and the total power are the two most important features that can be utilised to estimate the squat levels.
- Both k-means and agglomerative hierarchical clustering provide similar good results.
- The DBSCAN clustering encounters some challenges and clusters the 4 mm depth case as anomalies; therefore, it is not suitable for using this algorithm to process such a data set.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Litherland, J.; Andrews, J. A reliability study of railway switch and crossing components. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2023, 237, 205–217. [Google Scholar] [CrossRef]
- Kassa, E.; Andersson, C.; Nielsen, J.C. Simulation of dynamic interaction between train and railway turnout. Veh. Syst. Dyn. 2006, 44, 247–258. [Google Scholar] [CrossRef]
- Cornish, A.; Smith, R.A.; Dear, J. Monitoring of strain of in-service railway switch rails through field experimentation. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 1429–1439. [Google Scholar] [CrossRef]
- Administration, Trafikverket Trafikverkets årsredovisning, Annual Report; Technical Report; Trafikverket: Borlänge, Sweden, 2018.
- Office of Rail and Road. Passenger Rail Performance; Technical Report; Office of Rail and Road: London, UK, 2020. [Google Scholar]
- Fuqing, Y. Failure Diagnostics Using Support Vector Machine. Ph.D. Thesis, Luleå Tekniska Universitet, Luleå, Sweden, 2011. [Google Scholar]
- Malekjafarian, A.; OBrien, E.; Quirke, P.; Bowe, C. Railway Track Monitoring Using Train Measurements: An Experimental Case Study. Appl. Sci. 2019, 9, 4859. [Google Scholar] [CrossRef]
- Feng, H.; Jiang, Z.; Xie, F.; Yang, P.; Shi, J.; Chen, L. Automatic fastener classification and defect detection in vision-based railway inspection systems. IEEE Trans. Instrum. Meas. 2013, 63, 877–888. [Google Scholar] [CrossRef]
- European Committee for Standardization. EN 13848-3 Railway Applications: Track. Track Geometry Quality. Part 3: Measuring Systems. Track Construction and Maintenance Machines; CEN: Bruxelles, Belgium, 2009. [Google Scholar]
- Zuo, Y. Squat Detection in Railway Switches & Crossings Using Point Machine Vibration. Ph.D. Thesis, Luleå University of Technology, Luleå, Sweden, 2022. [Google Scholar]
- Ren, Y.; OBrien, E.J.; Cantero, D.; Keenahan, J. Railway Bridge Condition Monitoring Using Numerically Calculated Responses from Batches of Trains. Appl. Sci. 2022, 12, 4972. [Google Scholar] [CrossRef]
- Barke, D.; Chiu, W.K. Structural health monitoring in the railway industry: A review. Struct. Health Monit. 2005, 4, 81–93. [Google Scholar] [CrossRef]
- Guo, L.; Zhang, J.; Chen, Z.; Sun, L.; Ge, J.; Lü, K.L.; Dai, G.Y. Automatic detection for defects of railroad track surface. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Wollerau, Switzerland, 2013; Volume 278, pp. 856–860. [Google Scholar]
- Fu, S.; Jiang, Z. Research on image-based detection and recognition technologies for cracks on rail surface. In Proceedings of the 2019 International Conference on Robots & Intelligent System (ICRIS), Haikou, China, 15–16 June 2019; pp. 98–101. [Google Scholar]
- Yaman, O.; Karakose, M.; Akin, E. A vision based diagnosis approach for multi rail surface faults using fuzzy classificiation in railways. In Proceedings of the 2017 International Conference on Computer Science and Engineering (UBMK), Antalya, Turkey, 5–8 October 2017; pp. 713–718. [Google Scholar]
- Gan, J.; Li, Q.; Wang, J.; Yu, H. A hierarchical extractor-based visual rail surface inspection system. IEEE Sens. J. 2017, 17, 7935–7944. [Google Scholar] [CrossRef]
- Liang, Z.; Zhang, H.; Liu, L.; He, Z.; Zheng, K. Defect detection of rail surface with deep convolutional neural networks. In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 1317–1322. [Google Scholar]
- Li, Q.; Zhong, Z.; Liang, Z.; Liang, Y. Rail inspection meets big data: Methods and trends. In Proceedings of the 2015 18th International Conference on Network-Based Information Systems, Taipei, Taiwan, 2–4 September 2015; pp. 302–308. [Google Scholar]
- Zhang, X.; Feng, N.; Wang, Y.; Shen, Y. An analysis of the simulated acoustic emission sources with different propagation distances, types and depths for rail defect detection. Appl. Acoust. 2014, 86, 80–88. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, X.; Peng, C.; Wang, Z.; Li, X. Rail inspection research based on high speed phased array ultrasonic technology. In Proceedings of the 2016 IEEE Far East NDT New Technology & Application Forum (FENDT), Xiamen, China, 6–8 July 2018; pp. 181–184. [Google Scholar]
- Kaewunruen, S.; Ishida, M. In situ monitoring of rail squats in three dimensions using ultrasonic technique. Exp. Tech. 2016, 40, 1179–1185. [Google Scholar] [CrossRef]
- Moustakidis, S.; Kappatos, V.; Karlsson, P.; Selcuk, C.; Gan, T.H.; Hrissagis, K. An intelligent methodology for railways monitoring using ultrasonic guided waves. J. Nondestruct. Eval. 2014, 33, 694–710. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Q.; He, Q.; Yu, T.; Zhang, M.; Wang, P. CUFuse: Camera and ultrasound data fusion for rail defect detection. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21971–21983. [Google Scholar] [CrossRef]
- Alvarenga, T.A.; Carvalho, A.L.; Honorio, L.M.; Cerqueira, A.S.; Filho, L.M.; Nobrega, R.A. Detection and classification system for rail surface defects based on Eddy current. Sensors 2021, 21, 7937. [Google Scholar] [CrossRef]
- Chandran, P.; Thiery, F.; Odelius, J.; Lind, H.; Rantatalo, M. Unsupervised Machine Learning for Missing Clamp Detection from an In-Service Train Using Differential Eddy Current Sensor. Sustainability 2022, 14, 1035. [Google Scholar] [CrossRef]
- Kwon, S.G.; Lee, T.G.; Park, S.J.; Park, J.W.; Seo, J.M. Natural Rail Surface Defect Inspection and Analysis Using 16-Channel Eddy Current System. Appl. Sci. 2021, 11, 8107. [Google Scholar] [CrossRef]
- AbdAlla, A.N.; Faraj, M.A.; Samsuri, F.; Rifai, D.; Ali, K.; Al-Douri, Y. Challenges in improving the performance of eddy current testing. Meas. Control 2019, 52, 46–64. [Google Scholar] [CrossRef]
- Li, Z.; Molodova, M.; Núñez, A.; Dollevoet, R. Improvements in axle box acceleration measurements for the detection of light squats in railway infrastructure. IEEE Trans. Ind. Electron. 2015, 62, 4385–4397. [Google Scholar] [CrossRef]
- Molodova, M.; Oregui, M.; Núñez, A.; Li, Z.; Dollevoet, R. Health condition monitoring of insulated joints based on axle box acceleration measurements. Eng. Struct. 2016, 123, 225–235. [Google Scholar] [CrossRef]
- Wei, X.; Yin, X.; Hu, Y.; He, Y.; Jia, L. Squats and corrugation detection of railway track based on time-frequency analysis by using bogie acceleration measurements. Int. J. Veh. Mech. Mobil. 2020, 58, 1167–1188. [Google Scholar] [CrossRef]
- Grossoni, I.; Hughes, P.; Bezin, Y.; Bevan, A.; Jaiswal, J. Observed failures at railway turnouts: Failure analysis, possible causes and links to current and future research. Eng. Fail. Anal. 2021, 119, 104987. [Google Scholar] [CrossRef]
- Lesiak, P.; Szumiata, T.; Wlazło, M. Laser scatterometry for detection of squat defects in railway rails. Arch. Transp. 2015, 33, 47–56. [Google Scholar] [CrossRef]
- Ye, J.; Stewart, E.; Roberts, C. Use of a 3D model to improve the performance of laser-based railway track inspection. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 233, 337–355. [Google Scholar] [CrossRef]
- Faghih-Roohi, S.; Hajizadeh, S.; Núñez, A.; Babuska, R.; De Schutter, B. Deep convolutional neural networks for detection of rail surface defects. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 2584–2589. [Google Scholar]
- Bocciolone, M.; Caprioli, A.; Cigada, A.; Collina, A. A measurement system for quick rail inspection and effective track maintenance strategy. Mech. Syst. Signal Process. 2007, 21, 1242–1254. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.; Núñez, A.; Dollevoet, R. Parametric study of axle box acceleration at squats. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2015, 229, 841–851. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.; Núñez, A.; Dollevoet, R. Automatic Detection of Squats in Railway Infrastructure. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1980–1990. [Google Scholar] [CrossRef]
- Wei, X.; Liu, F.; Jia, L. Urban rail track condition monitoring based on in-service vehicle acceleration measurements. Measurement 2016, 80, 217–228. [Google Scholar] [CrossRef]
- Zuo, Y.; Thiery, F.; Chandran, P.; Odelius, J.; Rantatalo, M. Squat Detection of Railway Switches and Crossings Using Wavelets and Isolation Forest. Sensors 2022, 22, 6357. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, X.; Chen, Z.; Yang, Y.; Geng, C.; Zuo, M.J. Time-frequency ridge estimation: An effective tool for gear and bearing fault diagnosis at time-varying speeds. Mech. Syst. Signal Process. 2023, 189, 110108. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Feng, K.; Zuo, M.J.; Chen, Z. Automated and Adaptive Ridge Extraction for Rotating Machinery Fault Detection. IEEE/ASME Trans. Mechatronics 2023, 1–11. [Google Scholar] [CrossRef]
- Zuo, Y.; Lundberg, J.; Najeh, T.; Rantatalo, M.; Odelius, J. Squat Detection of Railway Switches and Crossings Using Point Machine Vibration Measurements. Sensors 2023, 23, 3666. [Google Scholar] [CrossRef]
- Peng, Z.K.; Chu, F. Application of the wavelet transform in machine condition monitoring and fault diagnostics: A review with bibliography. Mech. Syst. Signal Process. 2004, 18, 199–221. [Google Scholar] [CrossRef]
- Chen, X.; Yang, Y.; Cui, Z.; Shen, J. Wavelet Denoising for the Vibration Signals of Wind Turbines Based on Variational Mode Decomposition and Multiscale Permutation Entropy. IEEE Access 2020, 8, 40347–40356. [Google Scholar] [CrossRef]
- Chegini, S.N.; Bagheri, A.; Najafi, F. Application of a new EWT-based denoising technique in bearing fault diagnosis. Measurement 2019, 144, 275–297. [Google Scholar] [CrossRef]
- He, M.; Feng, L.; Zhao, D. Application of distributed acoustic sensor technology in train running condition monitoring of the heavy-haul railway. Optik 2019, 181, 343–350. [Google Scholar] [CrossRef]
- Chiementin, X.; Kilundu, B.; Rasolofondraibe, L.; Crequy, S.; Pottier, B. Performance of wavelet denoising in vibration analysis: Highlighting. J. Vib. Control 2012, 18, 850–858. [Google Scholar] [CrossRef]
- Torrence, C.; Compo, G.P. A Practical Guide to Wavelet Analysis. Bull. Am. Meteorol. Soc. 1998, 79, 6–78. [Google Scholar] [CrossRef]
- Frazier, M. A Friendly Guide to Wavelets (Gerald Kaiser). SIAM Rev. 1995, 140–145, 140–145. [Google Scholar] [CrossRef]
- MacQueen, J. Some Methods for classification and Analysis of Multivariate Observations. Bull. Am. Meteorol. Soc. 1967, 1, 281–297. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the KDD, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Chen, Y.; Tang, S.; Bouguila, N.; Wang, C.; Du, J.; Li, H. A fast clustering algorithm based on pruning unnecessary distance computations in DBSCAN for high-dimensional data. Pattern Recognit. 2018, 83, 375–387. [Google Scholar] [CrossRef]
- Roux, M. A Comparative Study of Divisive and Agglomerative Hierarchical Clustering Algorithms. J. Classif. 2018, 35, 345–366. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Squat | Squat Diameter Stage 1 | Max Depth Stage 1 | Squat Diameter Stage 2 | Max Depth Stage 2 |
|---|---|---|---|---|
| (mm) | (mm) | (mm) | (mm) | |
| A | 43 | 1.2 | 62 | 3.7 |
| B | 41 | 1.0 | 61 | 3.9 |
| C | 42 | 1.0 | 63 | 3.7 |
| D | 42 | 1.0 | 66 | 4.4 |
| E | 0 | 0 | 65 | 3.7 |
| F | 42 | 1.1 | 65 | 4.2 |
| G | 42 | 1.0 | 64 | 3.7 |
| H | 42 | 1.5 | 62 | 4.7 |
| I | 42 | 1.4 | 62 | 4.3 |
| J | 42 | 1.2 | 63 | 4.4 |
| K | 42 | 1.1 | 61 | 4.1 |
| Name | Range (Hz) | Sensitivity (mV/g) | Destruction Limit (g) | Resonant Frequency (kHz) |
|---|---|---|---|---|
| 608A | 0.5−10,000 | 10.2 | 50 | 22 |
| Feature Number | Feature Level | Description |
|---|---|---|
| 1 | basic | number of peaks |
| 2 | basic | total peak power |
| 3 | basic | mean peak power |
| 4 | basic | root mean square (RMS) |
| 5 | basic | total power |
| 6 | combined | total power/RMS |
| 7 | combined | sum of power > RMS/RMS |
| 8 | combined | number of data points > RMS |
| 9 | combined | total peak power/RMS |
| 10 | combined | mean peak power/RMS |
| Predicted Cluster | ||||
|---|---|---|---|---|
| 0 mm | 1 mm | 4 mm | ||
| Actual label | 0 mm | 6 | 0 | 0 |
| 1 mm | 0 | 6 | 0 | |
| 4 mm | 0 | 0 | 6 | |
| Predicted Cluster | |||||
|---|---|---|---|---|---|
| 0 mm | 1 mm | 4 mm | Noise | ||
| Actual label | 0 | 6 | 0 | 0 | 0 |
| 1 | 0 | 6 | 0 | 0 | |
| 4 | 0 | 0 | 0 | 6 | |
| noise | 0 | 0 | 0 | 0 | |
| Predicted Cluster | ||||
|---|---|---|---|---|
| 0 mm | 1 mm | 4 mm | ||
| Actual label | 0 | 6 | 0 | 0 |
| 1 | 0 | 6 | 0 | |
| 4 | 0 | 0 | 6 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, Y.; Lundberg, J.; Chandran, P.; Rantatalo, M. Squat Detection and Estimation for Railway Switches and Crossings Utilising Unsupervised Machine Learning. Appl. Sci. 2023, 13, 5376. https://doi.org/10.3390/app13095376
Zuo Y, Lundberg J, Chandran P, Rantatalo M. Squat Detection and Estimation for Railway Switches and Crossings Utilising Unsupervised Machine Learning. Applied Sciences. 2023; 13(9):5376. https://doi.org/10.3390/app13095376
Chicago/Turabian StyleZuo, Yang, Jan Lundberg, Praneeth Chandran, and Matti Rantatalo. 2023. "Squat Detection and Estimation for Railway Switches and Crossings Utilising Unsupervised Machine Learning" Applied Sciences 13, no. 9: 5376. https://doi.org/10.3390/app13095376