1. Introduction
Computer vision is a multidisciplinary field of study that involves enabling computers to gain understanding of data (usually digital images and videos) and, in the process, acquire, process, and extract useful information for decision making [
1]. Some of the popular areas of application of computer vision techniques include robotics [
2], autonomous vehicles [
3], and environmental monitoring [
4]. The measurement of wind speed and direction is a crucial aspect of environmental monitoring, especially for areas such as fault diagnosis [
5] and wind energy monitoring [
6]. Meteorologists also use wind information for climate pattern and climate trend research [
6]. While the accuracy of the technique employed in measuring this highly dynamic parameter (wind speed) is central to the integrity of the measurement, factors such as cost and area of application can lead to differences in choosing an appropriate technique, since different techniques may have application-specific strengths and weaknesses [
7]. One application where cup anemometers may be more suitable than pitot tube anemometers is in measuring wind speeds near the ground or in complex terrain [
8]. This is because cup anemometers are less affected by turbulence and changes in wind direction than pitot tube anemometers, which can be affected by eddies and vortices in the flow [
9,
10]. On the other hand, pitot tube anemometers may be more suitable for measuring airspeed in aircraft, unmanned aerial vehicles (UAVs), or other fluid flows where the total velocity, including horizontal and vertical components, is of interest [
11]. Therefore, computer vision hardware and algorithms similarly offer a strong alternative to other wind measurement systems, alongside the expected comparative application-specific merits. They are usually applied in areas where highly accurate, cost-effective, real-time, and non-intrusive approaches are desired [
12,
13].
Following fundamental contributions such as the simple mechanical wind indicator developed by Robert Hooke (1635–1703) and Sir Christopher Wren (1632–1723), which measured wind speed based on the directional deflection of a hanging plate oriented into the direction from which the wind was blowing [
14], more complex mechanical and ultrasonic wind sensors were developed. The cup anemometer for instance, has become a widely used device for accurate horizontal wind speed measurement, improving upon the previous techniques [
15]. The use of pitot tubes in airspeed measurement has also gained prominence because of their advantages in measuring fluid flow where the use of anemometers is impractical, in addition to their characteristic low cost, minimal friction losses, simple set up, and ease of installation merits [
16,
17]. In the aviation industry and wind tunnel ducts, pitot tubes can measure static and dynamic pressure of the prevailing wind, which is then converted to airspeed using the Bernoulli equation. Despite their many advantages however, they are sensitive to wind flow direction, can become clogged by particles when operating in dirty environments, and do not work well in low or medium wind speed environments [
18].
In recent years, computer vision techniques have increasingly been used for wind measurement due to their accuracy, efficiency, and cost effectiveness. Existing studies have considered employing machine learning techniques such as convolutional neural networks (CNNs) and recurrent neural networks (RNNs) for wind measurement [
19,
20,
21,
22]. Notably, Yang et al. [
21] proposed a novel wind measurement system for an unmanned sailboat based on computer vision (CV). The system consists of an airflow rope, a camera, and a computing platform. It measures the wind speed and direction by analyzing the fluttering of the airflow rope using a combination of a CNN and an RNN. Other methods which do not rely on artificial intelligence have also been reported [
19,
20,
21]. Among these, the work by Gunnlaugsson et al. [
22] is notable. The paper describes the design and construction of a telltale wind indicator for the Mars Phoenix lander, which was sent to Mars by NASA to study the Martian arctic environment. The wind measurement system involves a video camera focused on the movement of a suspended lightweight Kapton tube, based on which wind measurement, direction, and turbulence can be estimated.
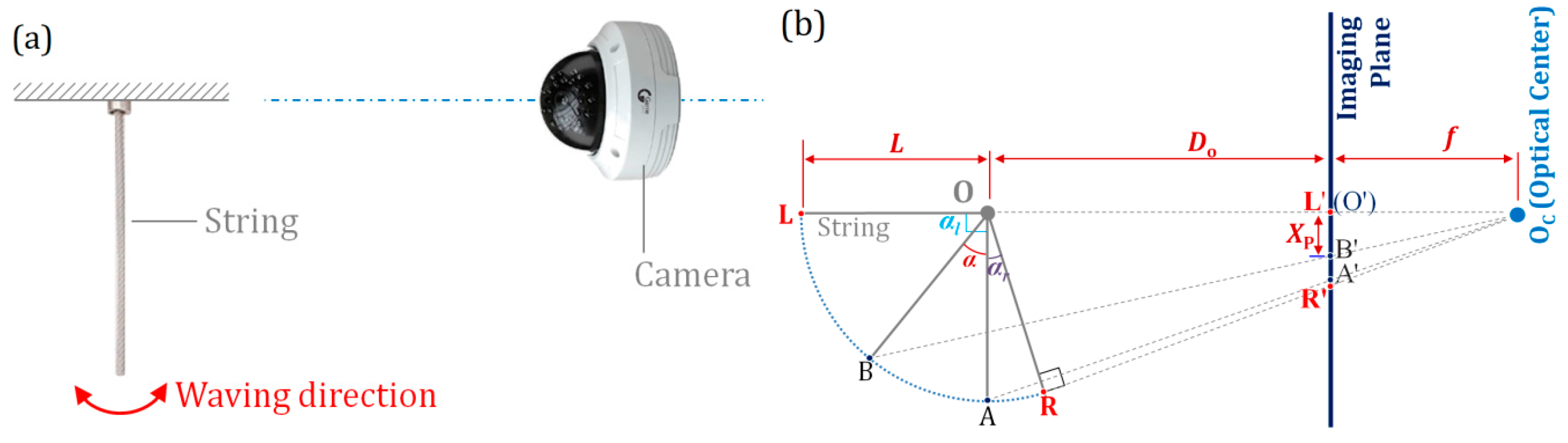
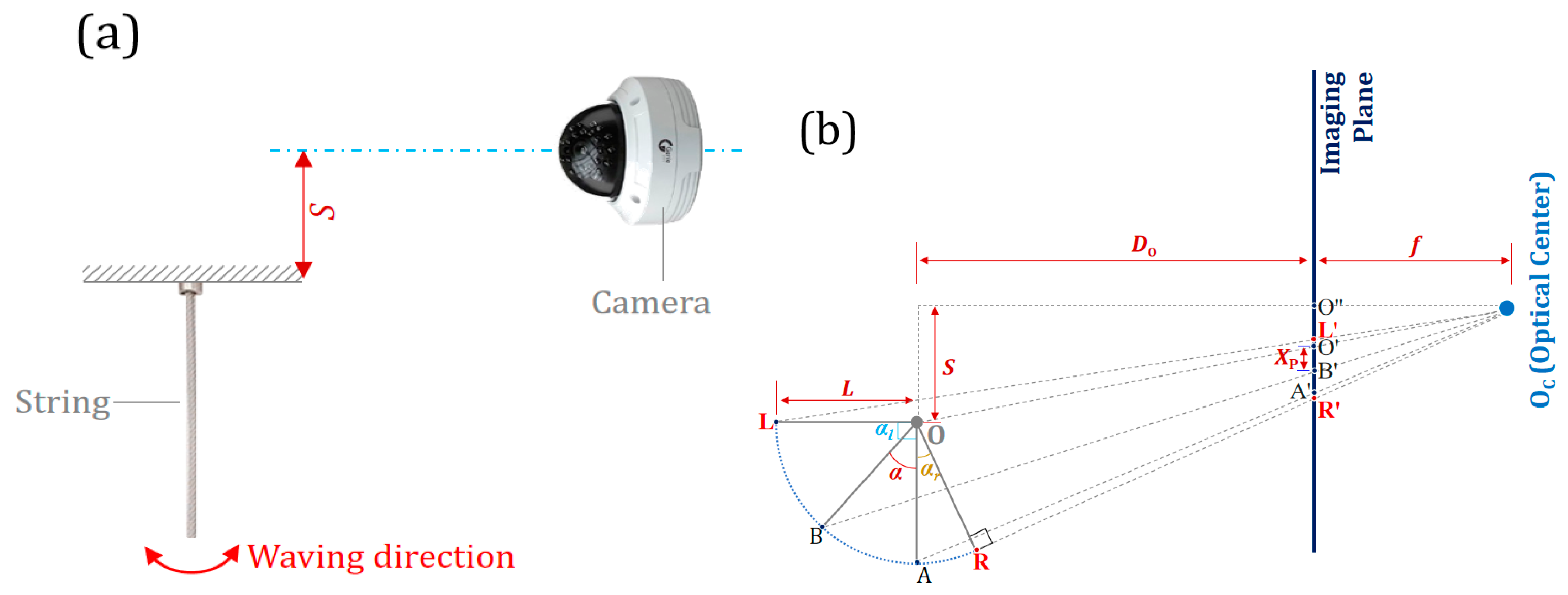
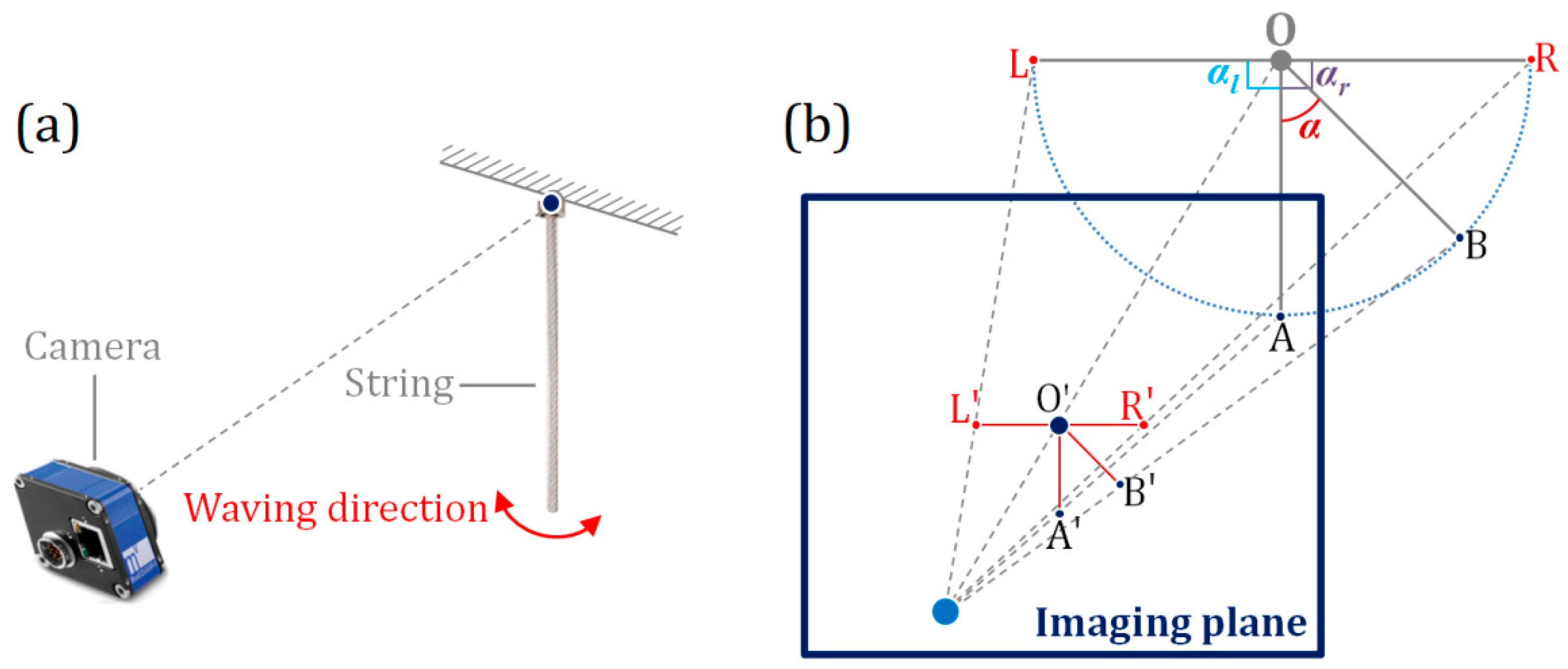
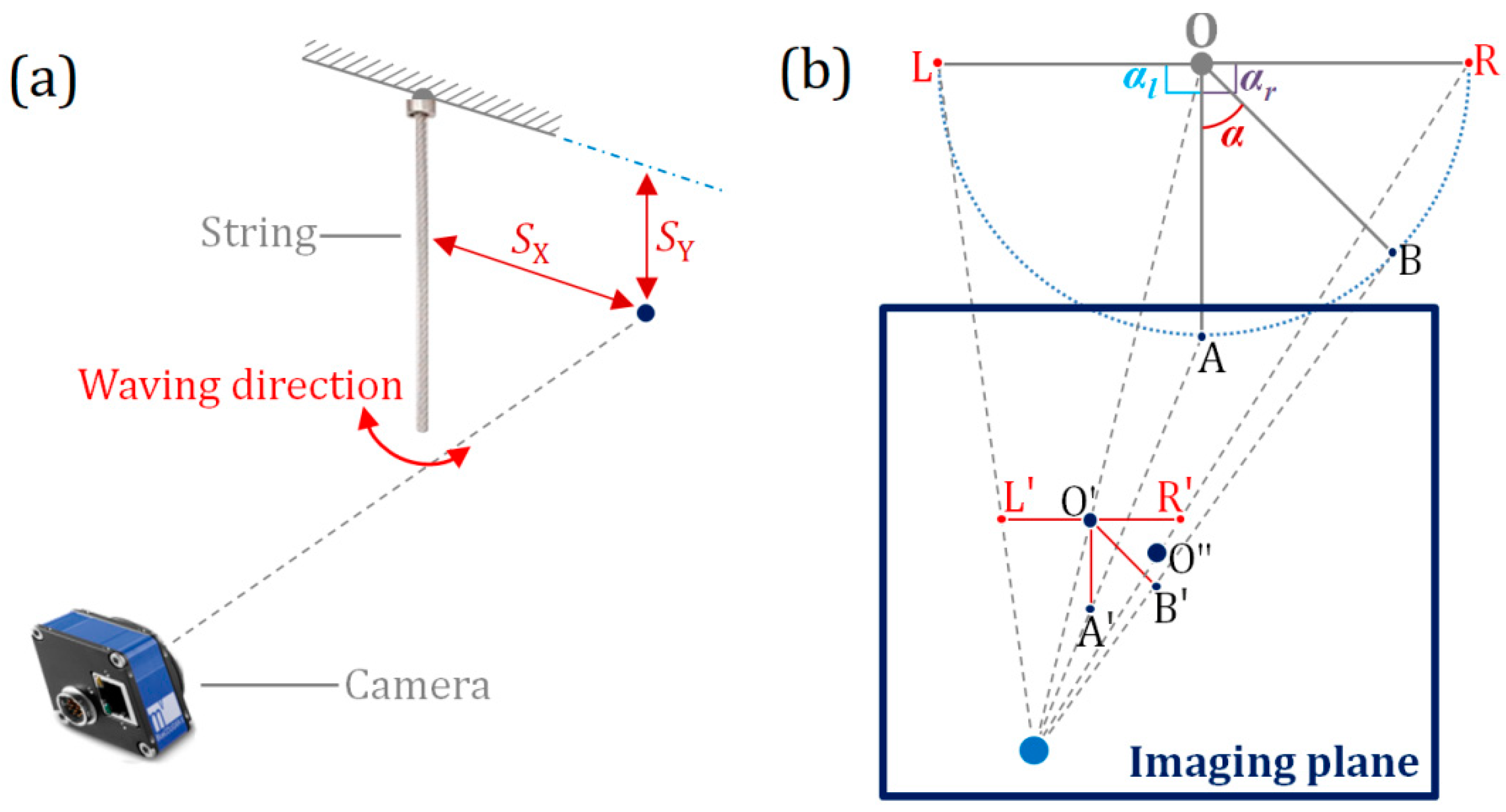
This paper proposes a computer-vision-based wind speed and direction measurement methodology for horizontal wind speed measurement in small, enclosed areas such as a stationary train equipment cabin. The proposed system consists of a single camera focused on a lightweight stick target that swings according to wind strength and direction. The pinhole camera model is implemented to model the relationship between the real-world angular displacement of the target and its corresponding displacement in the image plane when the camera is positioned relative to the lightweight stick target in front, side, and bottom orientations. The method combines the advantages of being lightweight, and having less intrusion on the flow field, small size, low cost, simple set up, and acceptable accuracy. These qualities make the proposed method particularly promising for two-directional wind speed measurement in enclosed areas.
The comparative advantages of the proposed method compared to traditional methods such as the plate anemometer immediately stand out. Compared to the plate anemometer, for instance, the proposed method is less intrusive, less prone to human error, and occurs in real time. Furthermore, the proposed method is not as sensitive to flow direction as the pitot tube and cup anemometer which are, in addition, more flow-intrusive. At the core of our proposed measurement methodology is the real-time detection of the lightweight stick, based on which wind speed and direction can be estimated. Therefore, our proposed method and the works of Yang et al. [
21] and Gunnlaugsson et al. [
22] also share similarities in that all involve vision-based detection of the fluttering, waving, or movement of some target. However, the former’s method is based on laboratory training data with an ultrasonic sensor as the reference device. This creates significant room for bias against the real working environment of the boat (sea and/or ocean). Although the authors attempted to address the problem, it remained an important limitation, as they admitted. The proposed method addresses this by establishing a well-defined relationship between the real-world movement of the target and its corresponding displacement in camera coordinates to allow for real-time measurement that directly depends on the active scene condition. Furthermore, in the application of the proposed method, several targets were lined across the breadth of the enclosed space in different positions, and focused on the same camera, to attain high accuracy and robustness, as suggested by Yang et al. [
21]. The latter’s method relies on the kinetic energy of the target and several empirical factors. Moreover, the determination of wind speed wholly depends on the relative tilt of the target, which necessitates dependence on one orientation where the camera plane is parallel to the movement of the target. If the camera were to be placed at an angle to the telltale, the output tilt angle would be incorrect, leading to incorrect wind speed measurement. In contrast, the proposed method relies on the geometric attitude of the target and attempts to address the heavy dependence on the relative camera–target orientation by formulating four different camera orientation scenarios, including one that couples multiple orientations.
Thus, we propose a wind speed and direction measurement method based on the movement of a lightweight stick. Detailed formulations are given for different camera orientations to correctly capture the target’s movement. Based on this displacement and together with the wind tunnel calibration coefficients, the wind speed and direction are determined. The method is applied to wind speed measurement in a stationary train equipment cabin, and compared with standard pitot measurements, showing good agreement. The method combines the advantages of being lightweight, and having less intrusion with the near flow field, small size, low cost, simple set up, and acceptable accuracy. These qualities make the proposed method particularly promising for two-directional wind speed measurement in enclosed environments such as the inner equipment cabin of railway trains.
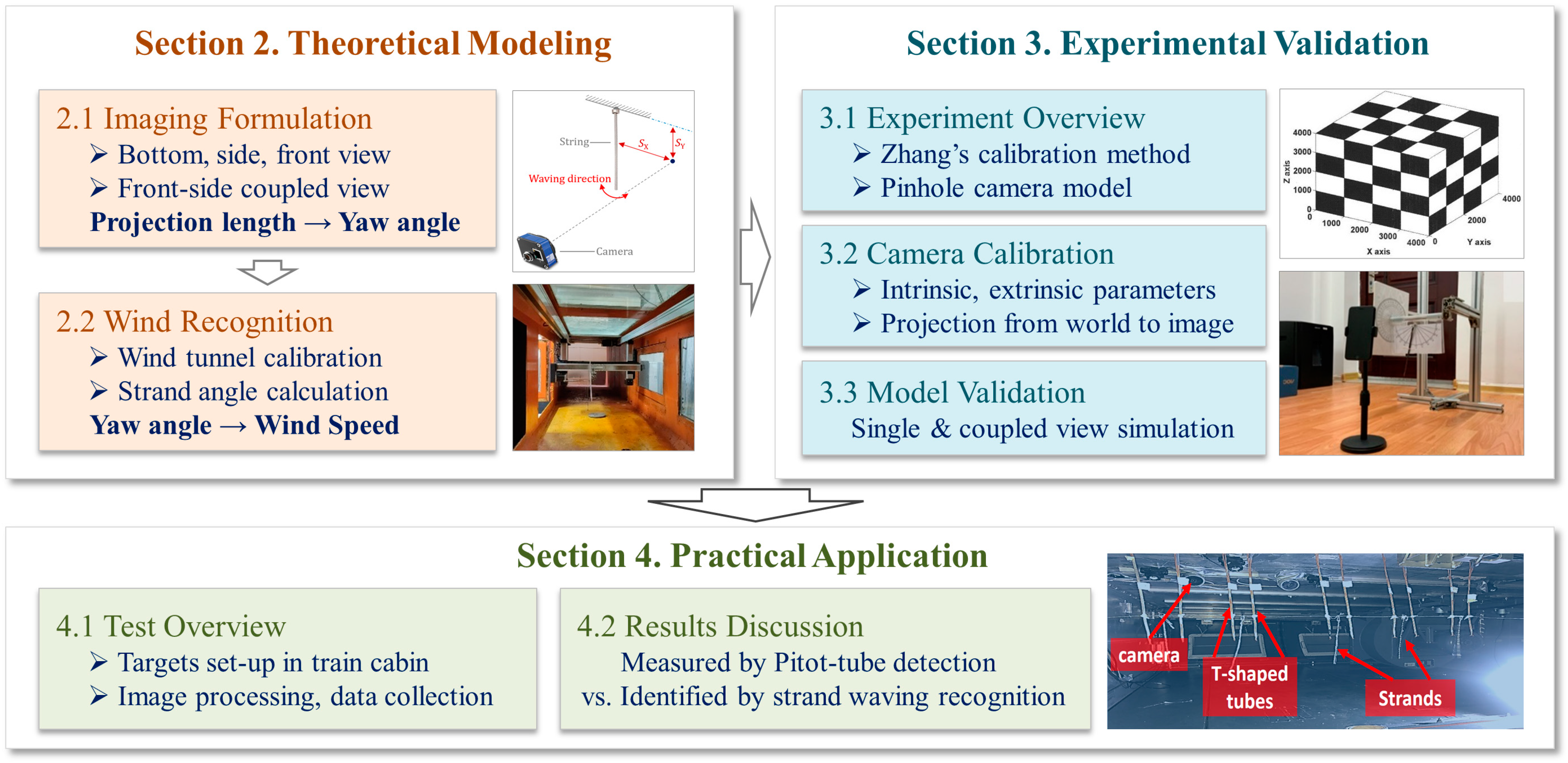
Figure 1 presented below is the technical route of the paper.
4. Experimental Validation
The camera was calibrated using Zhang’s method [
23] to obtain its intrinsic and extrinsic parameters. To validate the derived formulations, the world dimensions of the stick with respect to its angular displacements are transformed to the camera, image plane, and sensor coordinates in that order, through the characteristic pinhole-camera-based projection matrix in homogeneous coordinates, after which the resulting values are substituted into the formulated equations in
Section 2.1 to find the corresponding angular displacements in degrees (
). Finally, the system is applied in a stationary high-speed train equipment cabin to measure wind speed.
4.1. Camera Calibration
The intrinsic and extrinsic camera matrices were determined through Zhang’s calibration algorithm in MATLAB. According to this method, the intrinsic and extrinsic parameters of a camera can be estimated from several checkerboards taken at different orientations by the camera in question. In this way, the camera projection matrix can be estimated. While the intrinsic parameters do not change, the extrinsic parameters change with the change in camera position and orientation for side, front, and bottom views but are constant for any given validation since the camera is fixed. The camera used for image capturing was the HIKVISION wide-angle camera, the resolution of which is configured as 3024 × 4032.
An asymmetric checkerboard of high precision was adopted, where a total of 18 images shot at different orientations were collected and applied for calibration. Among them, four orientations are given, as in
Figure 15 below. The intrinsic parameter matrix is estimated as in Equation (33).
where
f is the focal length,
ρw and
ρh are the width and height of each pixel, (
u0,
v0) is the principal point in pixels, i.e., the coordinate of the point where the optical axis intersects the image plane.
4.2. Image Processing Algorithm
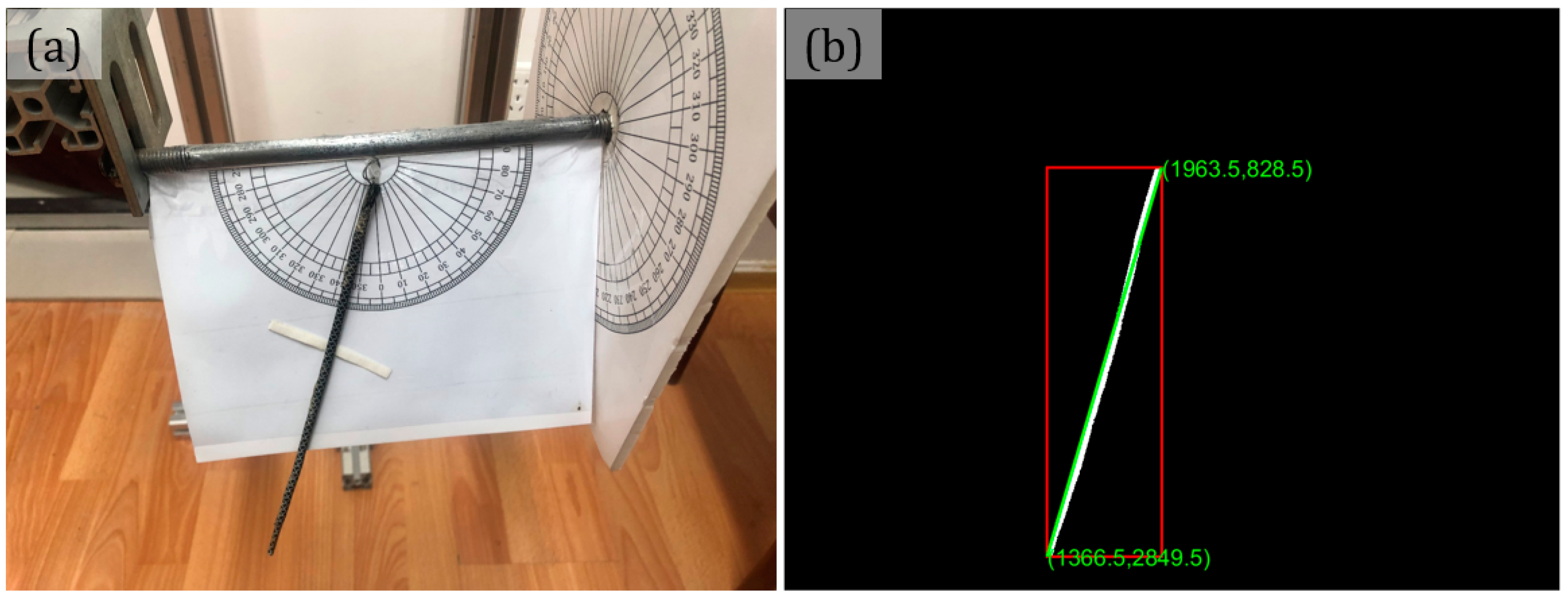
The proposed model relies on the accurate detection of the coordinates of the endpoints of the stick to determine the varying slope in case of the front view, or the length, in case of other views.
In the validation stage where only one image frame is required per test case, to determine the length and/or slope parameter(s), a standard object segmentation procedure [
24] was written in MATLAB to separate the foreground (stick) from the background. After adjusting the intensity of the image to enhance the contrast of the Region of Interest (ROI), the image was binarized and appropriately cropped before morphological operations (dilation and erosion) were applied to eliminate the thinner protractor lines in the background. Thereafter, the segmented stick region (in white color) was contained in an axis-aligned minimum bounding box (in red color) whose diagonal cuts through the region and touches the edges, serving as the line (in green) whose end coordinates represent the detected line coordinates as shown in
Figure 16 below.
4.3. Model Validation
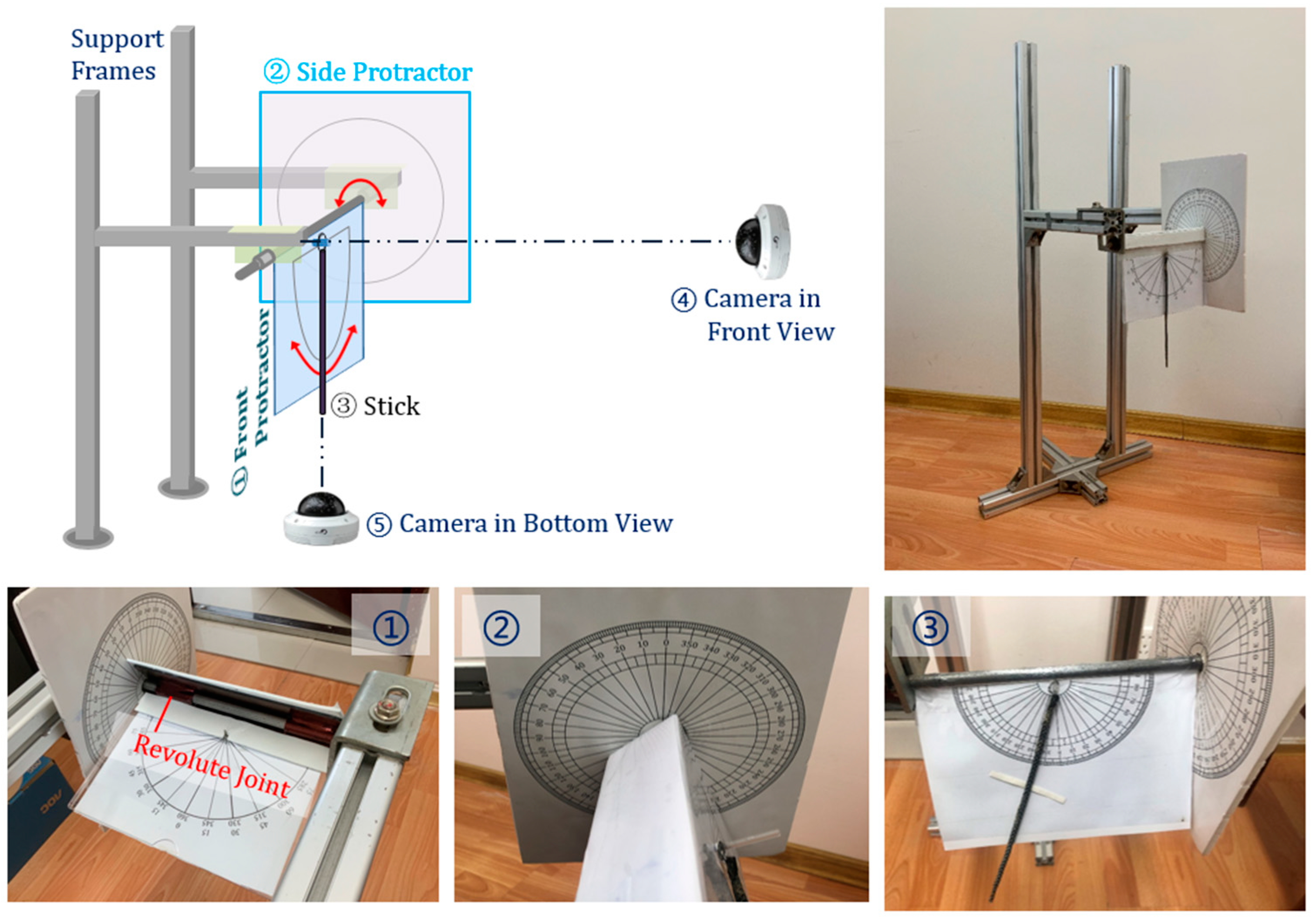
This section describes the implementation of the derived formulations through a validation experiment, where a system was set up as shown in
Figure 17 below. The camera was employed in capturing the target’s displacement in bottom, side, and front views after swinging it in REV1# and/or REV2# direction(s) by a known magnitude with the aid of two protractors. Attached to the right and front sides of the cantilevered arm are the side and front plates on which the 360° and 180° protractors are placed, respectively. The front plate can be rotated (REV1#) up to 360° about the revolute joint, as in
Figure 17 ①. The side plate is fixed and acts to perform the swing of the front plate in the REV1# direction, whereas the stick on the front protractor can be regulated in the swinging range of ±90° at REV2# by double-faced adhesive tape between the stick and the front protractor plate, as in
Figure 17 ③.
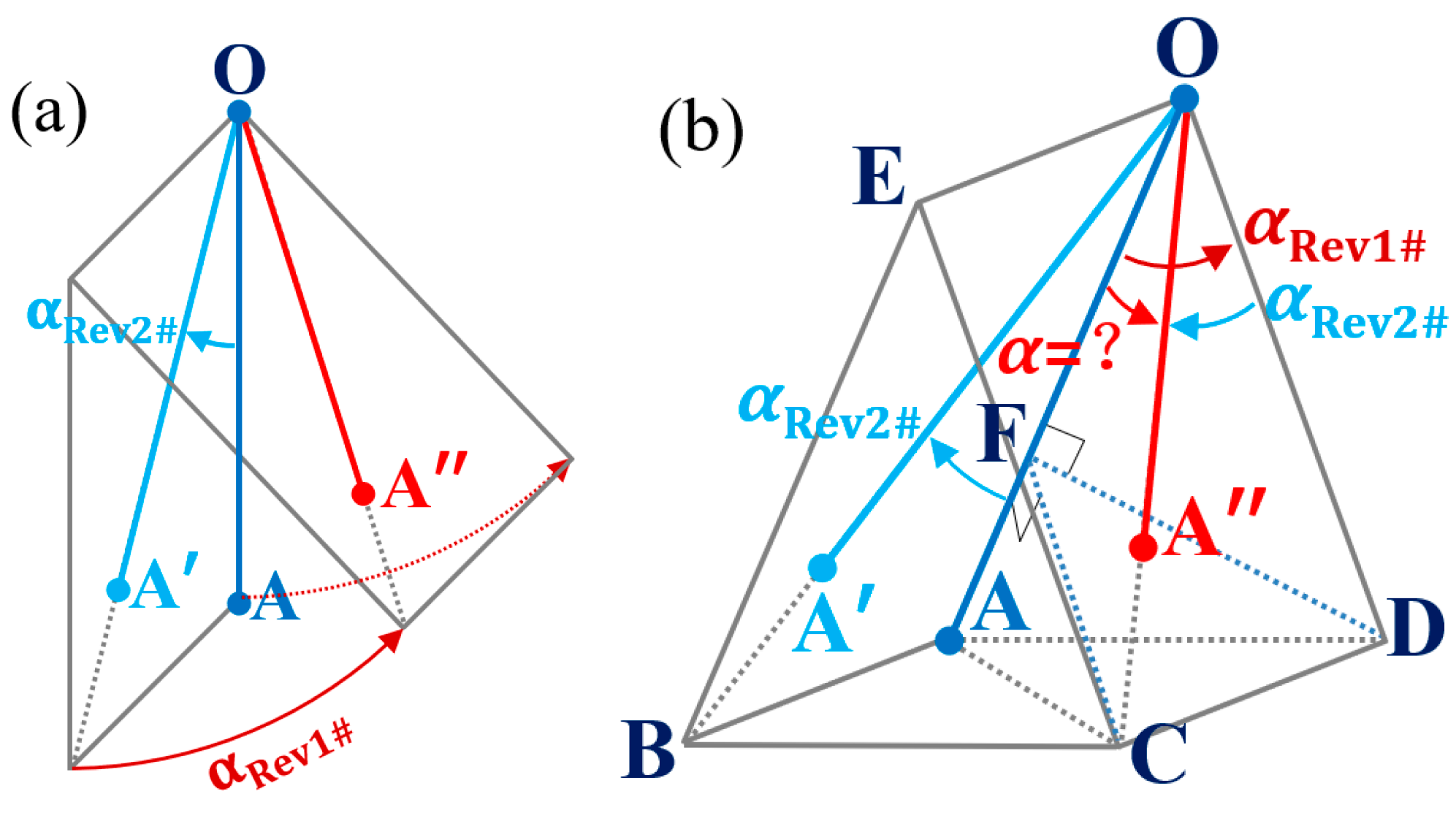
The side and front protractors are designed to change the stick’s orientations. However, there is an indirect relationship between REV1#, REV2#, and the yaw angle, the wind direction angle. In the coupled imaging cases, given that the stick OA is first rotated in the front plate by
αRev2# up to OA′ according to the front protractor, and the front plate is then rotated by
αRev1# to a new position OA″ according to the side protractor, the two steps can be illustrated in
Figure 18a below, in terms of a fan-shaped cylinder. When mathematically geometrized, the model can be expressed as a triangular prism in
Figure 18b where ∠AOA′ describes the stick swing angle
αRev2# in the front plate and ∠AOD denotes the front plate swing angle
αRev1# along the side plate. Accordingly, the stick yaw angle
α is the angle between the initial and ultimate position ∠AOC. The wind direction is the angle between △OAC and △OAD, denoted as
αWD, which is found by constructing a perpendicular plane between them.
In light of the stick length
L, |OA| = |OD| =
L. From the equivalent right triangles △ODC and △OAB, we can write:
In △OAD, adopting the law of cosines:
In the △OAC, employing the law of cosines again based on (34) and (36) above, we have:
The yaw angle
α is thus given in terms of REV1# and REV2# in Equation (37) as below.
To find a joint perpendicular plane of both △OAC and △OAD, DF is created in △OAD and vertically intersects with OA at F. Since the face OABE rotates about OE to face ODCE, CD⊥△OAD, thus OA⊥CD. Since OA⊥DF, then OA⊥△CDF. Thus, any plane which has OA is perpendicular to △CDF, which means △OAC and △OAD are both perpendicular to △CDF. Therefore ∠CFD is the wind direction angle αWD.
In △CDF, CD⊥DF because CD⊥△OAD. Thus, the wind direction is given as below.
Hence, if rotated in both REV1# and REV2#, respectively, in front and side protractors, the practical stick yaw angle and wind direction are given in Equations (38) and (39), respectively. In this way, when the camera is placed in front as in
Figure 17 ④ or at bottom as in
Figure 17 ⑤, pure imaging cases, which only consider the yaw angle variation, can be simulated by changing REV1# as side view imaging cases, and REV2# as front view cases when the camera is placed in front. Accordingly, the pure bottom view case is simulated by changing REV1# when the camera is placed at bottom. Those cases will be included in
Section 4.3.1—validation of pure imaging views. If REV1# and REV2# are coordinated at the same time to a certain amount of magnitude, the detected yaw angle and wind direction will be compared with theoretical ones in coupled bottom view and coupled side-front view.
4.3.1. Validation of Pure View Cases
In validation tests of pure imaging views, camera parameters are given in
Table 2 including the stick length, object distance, optical deviation, focal length, and camera resolution in bottom, side, and front views. Among them, the camera is placed at a deviation of 70.4 mm and 68.7 mm, respectively, in bottom and side view. In front view, the camera is placed at the same position as in side view case. However, the stick is adjusted by only REV2# in the front plate.
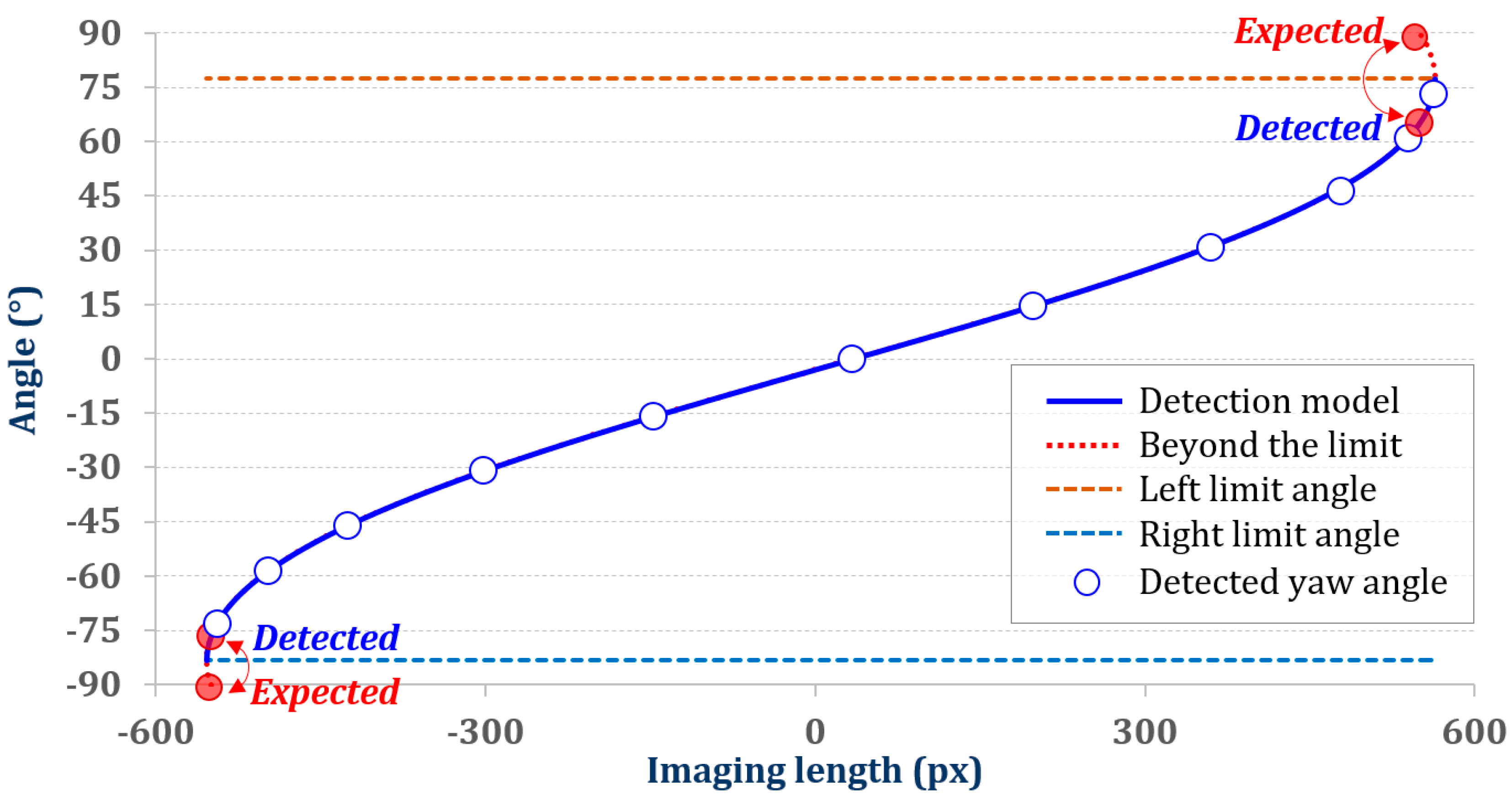
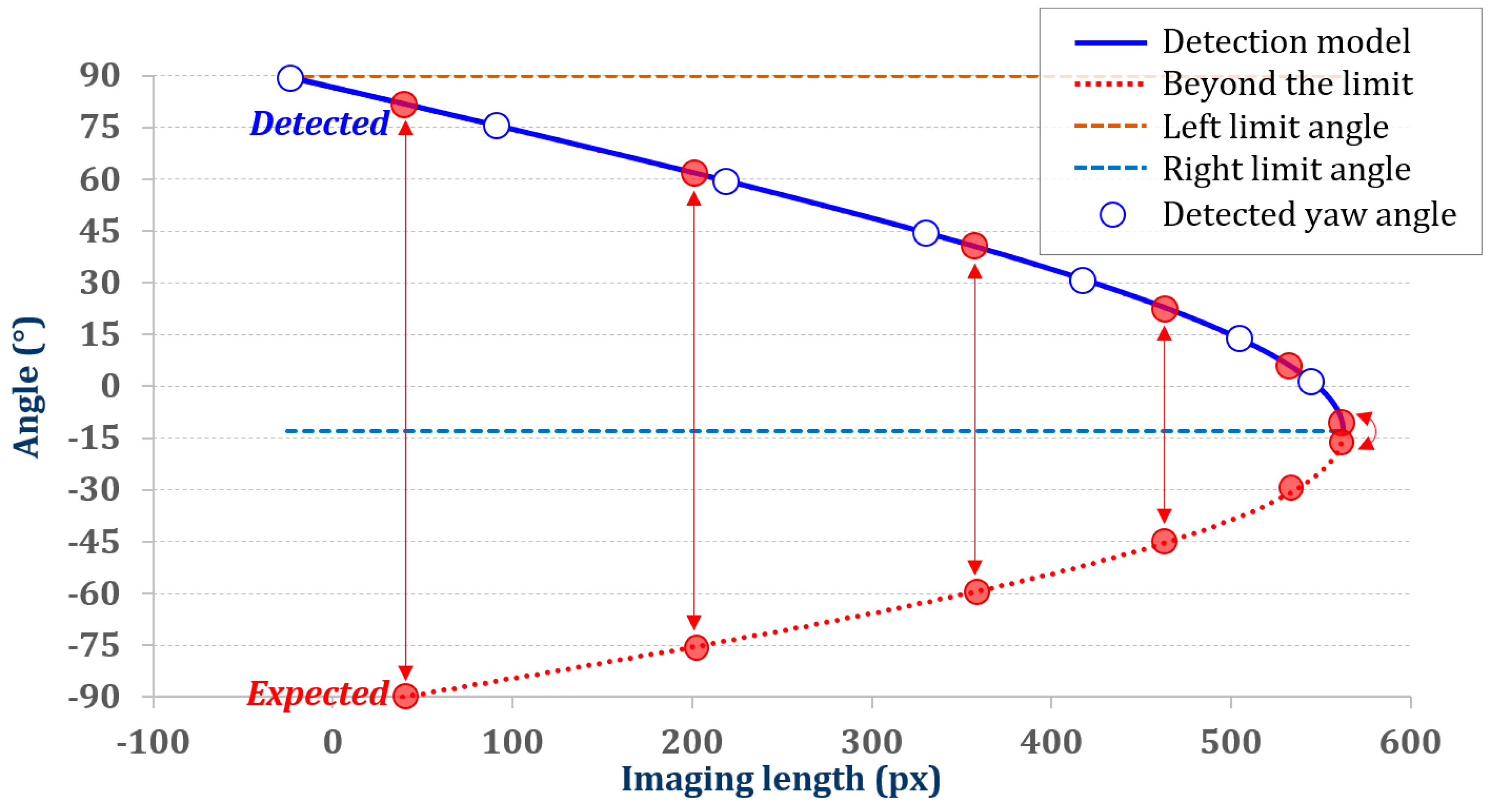
In pure deviated bottom view, the stick lines are in its initial vertical direction in the front plate. The plate is rotated by REV1# in the range of ±90° at an interval of 15°. Imaging length
XP is calculated by identifying the pixel coordinates of the fixed and free stick ends, which are then substituted into Equation (6) to acquire the yaw angle
α at each REV1# case. To better compare and validate the test results, two continuous curves are given for the proposed detection model by obtaining the imaging length
XP from the discretized yaw angle
α (0.5° interval) based on Equation (5) as the dashed red line, and also by acquiring the yaw angle
α from the above discretized imaging length
XP based on Equation (6) as the blue solid line in
Figure 19 below. Left and right limit angles are computed according to Equations (10) and (11), and depicted as the two horizontal lines; the top 77.6° describes the left and the bottom −83.2° denotes the right limit angle. The 13 detected yaw angles are illustrated as circular, blue-edge markers which go well with the detection model, while the red markers are the results beyond the limit.
From the above, it is seen that when the yaw angle cases vary between the left and right angle limits, the detected yaw angles agree well with the theoretical detection model (Equation (6)). However, when REV1# is ±90° beyond the limit of −83.2 to 77.6°, there is a big deviation between the detected and the expected, as shown in the red circular markers. Due to the geometrical relationship, the detected and the expected yaw angles are symmetric to the left and right limits, respectively, for 90° and −90° yaw angle cases.
In pure deviated side view, the camera is placed in front of the front plate, but the stick stays at the same position while the front plate is rotated in the same way as in the bottom view cases. The identified imaging length
XP is substituted into Equation (18) to acquire the yaw angle
α at each REV1# case. The left and right limits are calculated as 90° and −13.0° according to Equation (22) and Equation (23). The detection model from yaw angle to imaging length, and the inversion model, are respectively denoted as the dashed red line and solid blue line in
Figure 20. Detected yaw angles in 13 REV1# imaging cases are illustrated as circular blue-edge markers, among which the red markers indicate the results that are beyond the limit.
It can be observed that when the REV1# imaging cases vary between 90° and −13.0°, the detected yaw angles agree well with the theoretical detection model (Equation (18)). However, when REV1# is below the right limit of −13.0°, there is a big deviation between the detected and the expected as shown in the red circular markers. As REV1# increases in the negative direction, the difference becomes bigger. Due to the same geometry rules however, the detected yaw angles placed over the blue solid line—the detection model—are symmetrical to the right limit angle with the expected yaw angles on the red dashed line beyond the limit (
Figure 20).
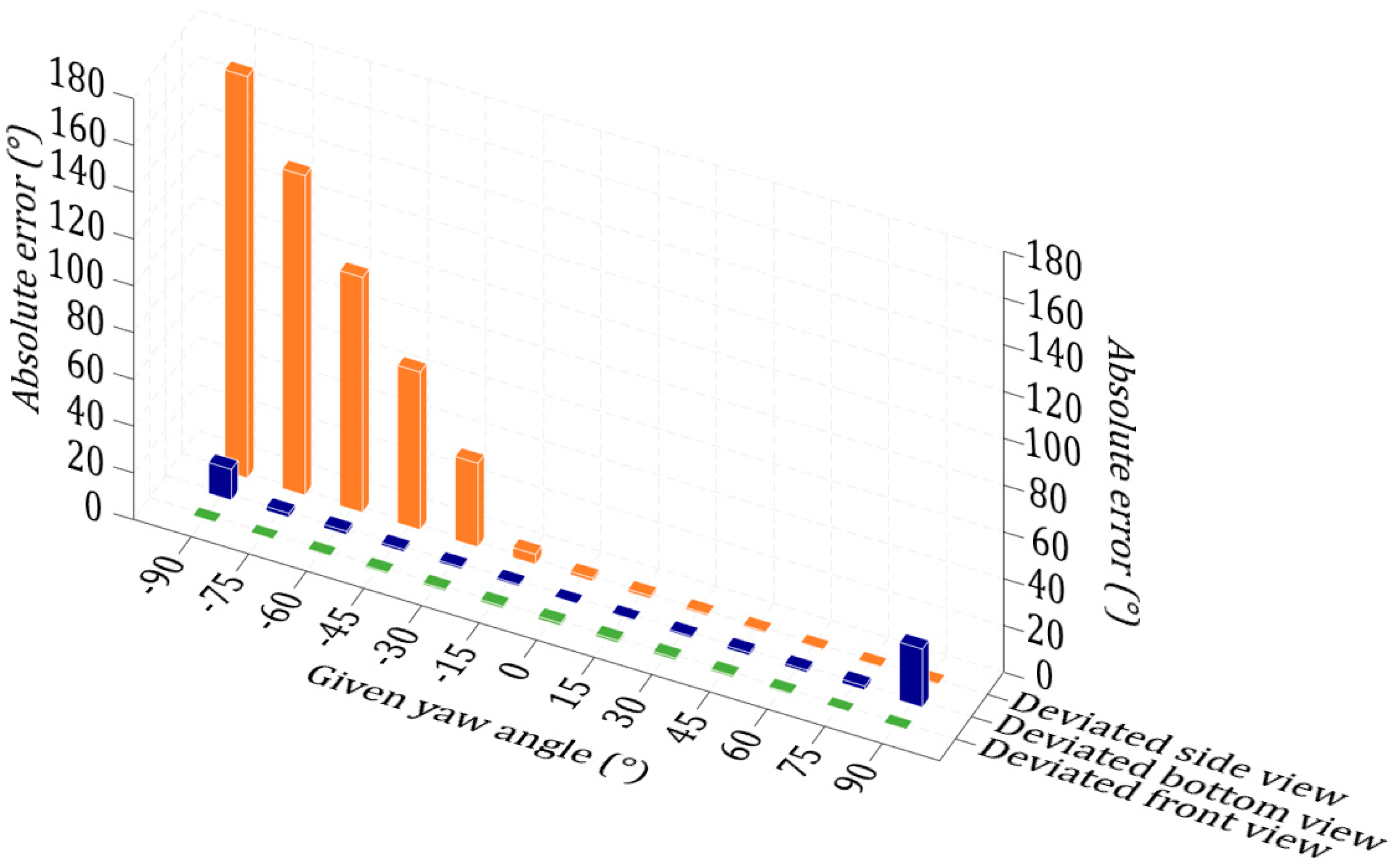
In pure deviated front view, the camera is placed in the same position as in the deviated side view, whereas the front plate remains still, and the stick is rotated by REV2# in the range of ±90° at an interval of 15°. Pixel coordinates of the stick’s ends are identified and substituted into Equation (24) to obtain the yaw angle
α within its physical limits. From the above, the detected yaw angles as well as their corresponding imaging lengths in bottom and side view cases, and identified slopes in front view cases, are listed in
Table 3 below. The error between the detected and given yaw angles is plotted in
Figure 21.
It is seen that in the deviated side view case, the absolute error between the detected and expected yaw angle varies within 1.5° in the range of −13.0 to 90°. However, as the given yaw angle negatively increases beyond the detection limit, the error grows from 4.3° to as high as 171.6° because of its incapability in identifying the imaging length change in the stick when approaching or going away from the camera. In deviated bottom view, the error is within 1.8° when the given yaw angle changes in the limit range, whereas it rises to 13.2° and 24.9° at ±90° beyond the angle limit. Among all imaging views, the front view attains the best performance in its yaw angle detection precision due to the slope-only dependent measurement of the stick image, where the maximum error is no more than 1.2°. It is therefore recommended that coupled view with front-dominated detection be employed in practical application.
4.3.2. Validation of Coupled View Cases
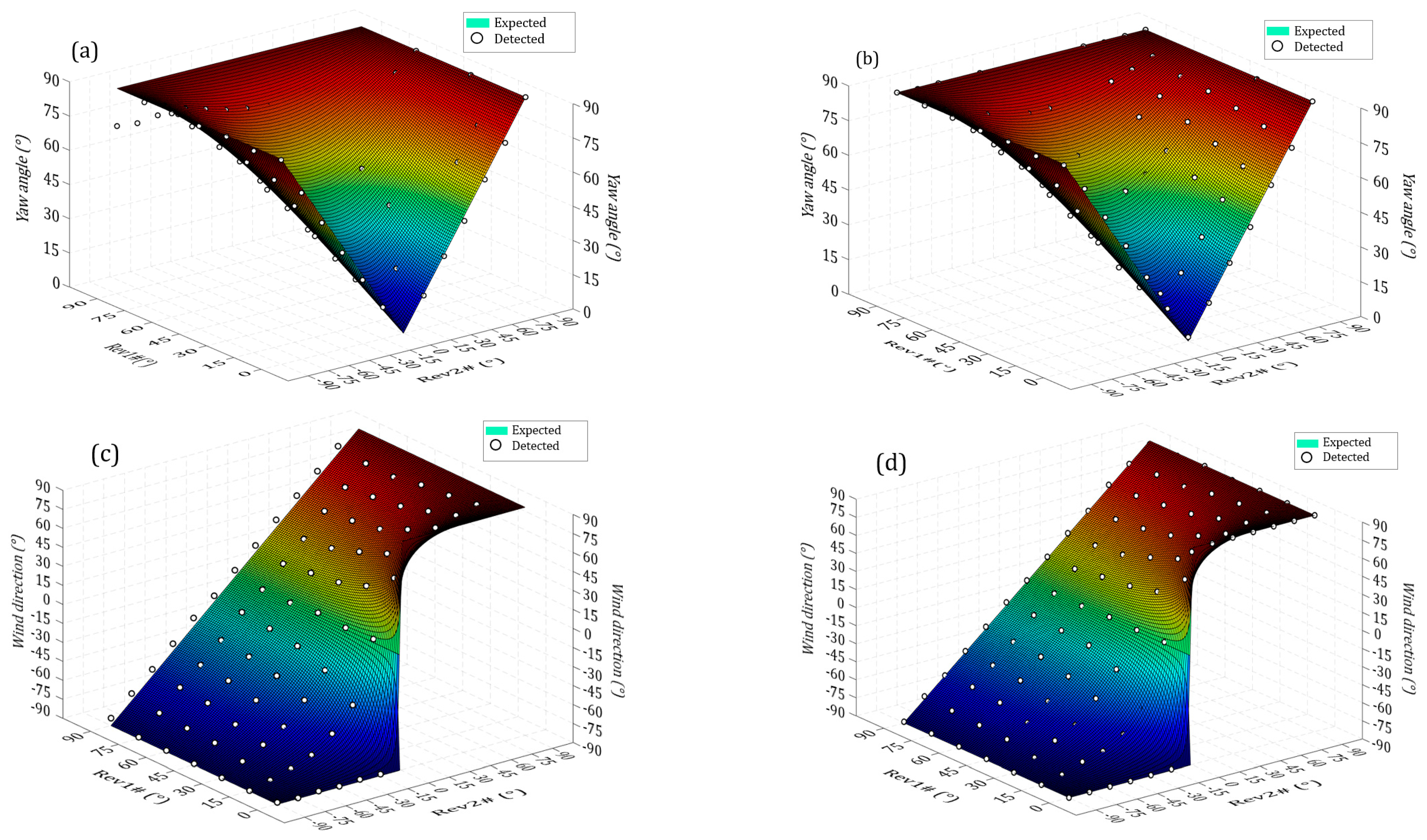
In coupled view imaging cases, the camera is placed at bottom and in front of the front plate, just as in the bottom-front coupled view and side-front coupled view cases where the yaw angles and wind directions are both regulated. For different coupled view cases, the practical yaw angle and wind direction are simulated by adjusting REV1# in the range of 0 to 90° and REV2# in the range of ±90°, in steps of 15°. In each imaging case, the yaw angle and wind direction are calculated according to Equations (38) and (39) based on the given REV1# and REV2#.
The camera is fixed in the same position as in the pure deviated bottom view, for bottom-front coupled view imaging case, and as in the pure deviated side view, for the side-front coupled view imaging case. Detected yaw angles and wind directions are calculated based on the stick’s imaging length and orientation, respectively, according to Equations (6) and (12) for bottom-front coupled view, and according to Equations (27) and (28) for side-front coupled view. The detected results are denoted as black-edged white circles and compared with the 3-D contour curve surface of the expected yaw angle and wind direction acquired from REV1# and REV2# in a dense space of 0.5°, as shown in
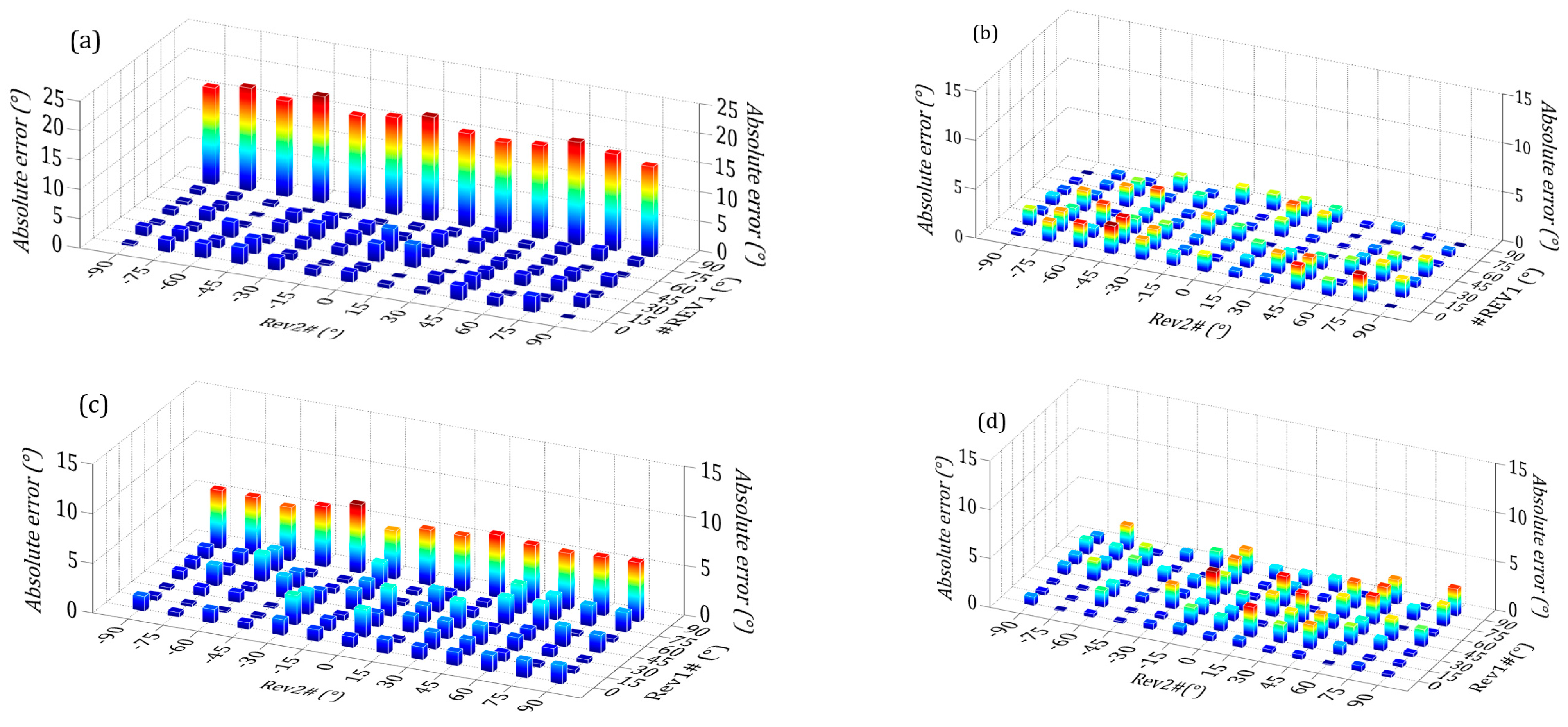
Figure 22a, 21b, 21c, 21d, respectively, for yaw angle detection in bottom-front and side-front coupled view, and wind direction detection in bottom-front and side-front coupled view. The absolute errors between detected and expected results are accordingly given in terms of 3-D contoured bars in
Figure 23a, 22b, 22c, 22d, respectively, for the above cases.
It can be observed that all the detected results agree well with the expected cases, both in terms of yaw angle and wind direction detections, as depicted in the 3-D surface plots. The maximum absolute error for yaw angle detections is 4.0° within the limit range and climbs to 18.1° beyond the limit in bottom-front coupled view, compared to a smaller maximum absolute error of 2.9° in side-front coupled view validation. This is because the validated yaw angle range in side-front coupled view covers all validated cases, whereas in bottom-front coupled view, it exceeds the limit range above the 75°. In wind direction detection, a similar trend is seen as in bottom-front coupled view where the maximum absolute error is no more than 3.0° within the limit range but climbs to 5.9° above the limit. The maximum error is 3.4° for side-front coupled view, which is proximal to the bottom-front view within its yaw angle limit range. In all, the results show that the proposed method measures both yaw angle and wind direction with good accuracy, provided that the limit range of measurement is not exceeded.
5. Practical Application
5.1. Test Overview
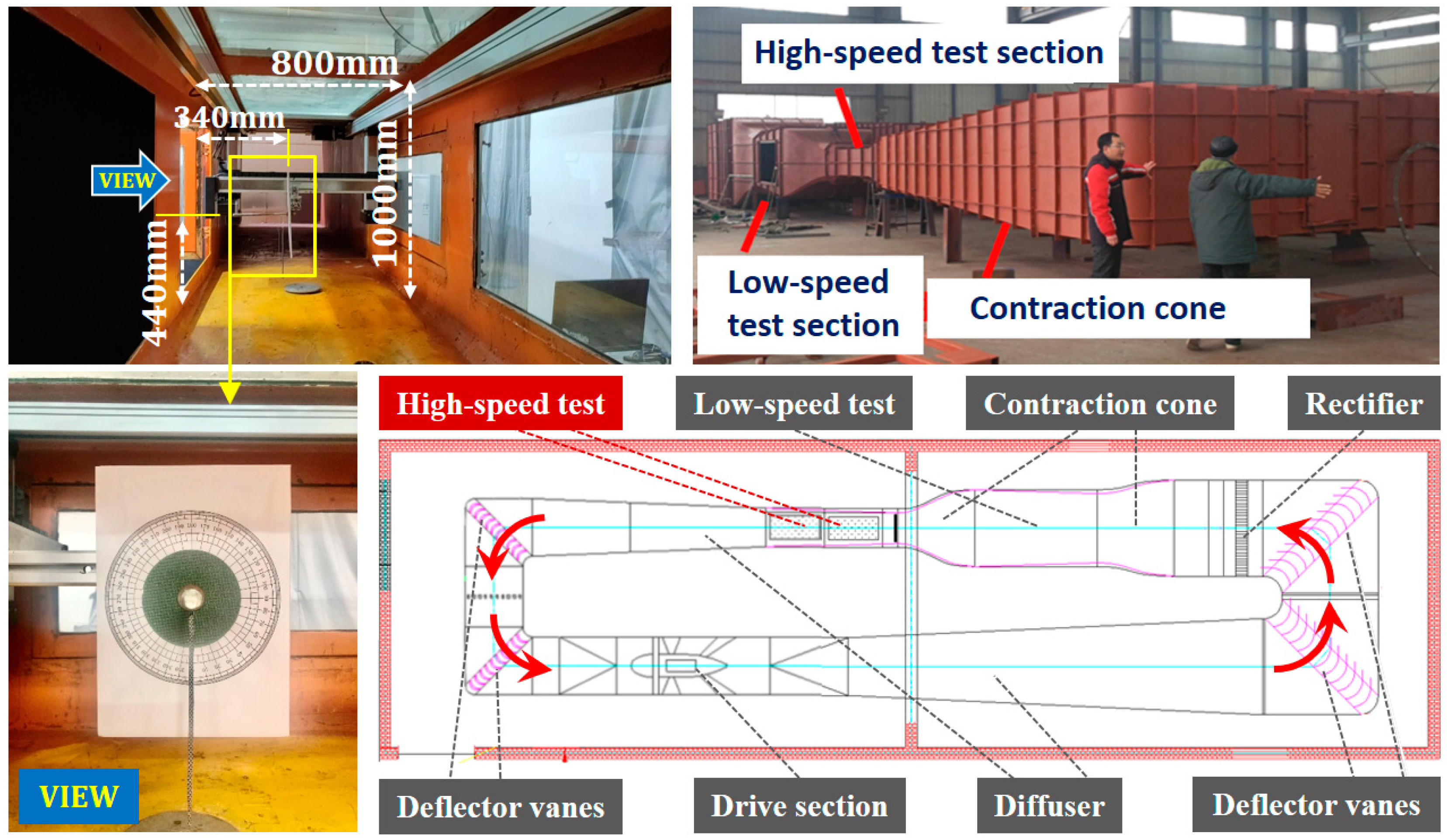
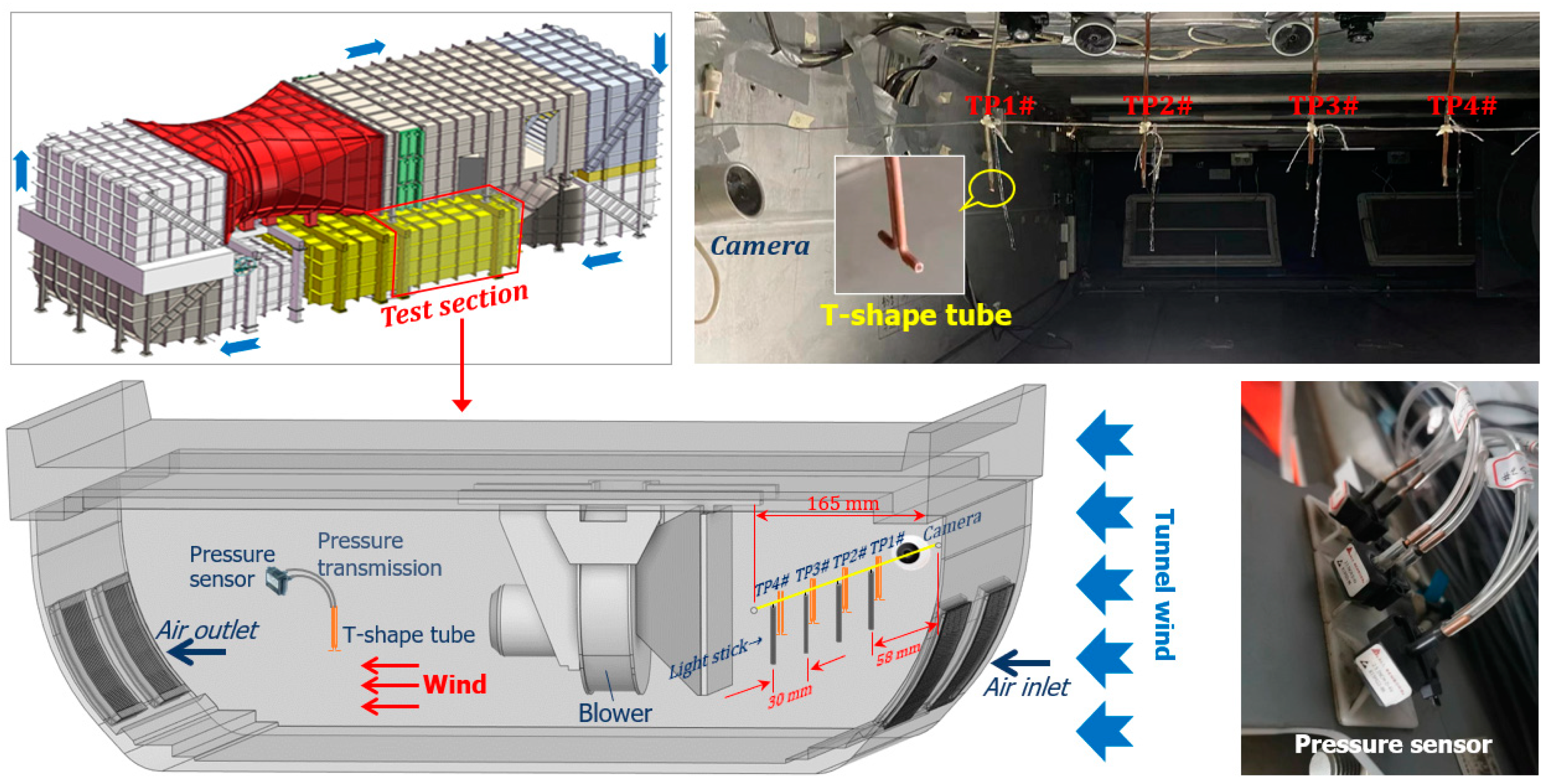
To demonstrate the applicability of the proposed method in practical cases, a wind tunnel test was implemented in the stationary equipment cabin of a high-speed train. Unlike the wind tunnel calibration test in
Section 3.2, the Environmental Wind Tunnel (EWT) is a vertical closed circuit with an open test section (4 m × 1 m at the inlet and 6.7 m in length). The key components of the wind tunnel consist of insulation layers, axial fan, and the rotary table with wheelset drive system, etc.
In the wind tunnel test, the cabin was situated in the test section with its air inlet facing the tunnel airflow direction where filter screens are installed behind the inlet grills at the skirt plate to prevent dust accumulation in the cabin. Since the air filter can influence the flow characteristics inside the compartment, four 225 mm long light sticks were equally spaced at 30 mm, and aligned 165 mm away from the inlet grills, in an attempt to detect the wind speed behind the grills and air filters. This is also important to test the uniformity of the flow at different points with the same camera. Four T-shape tubes were fixed beside each stick and linked with a pressure transmission pipe to pressure sensors to test the wind speed based on the pitot method as the reference for the proposed method. Finally, a video camera was placed 58 mm away from the closest stick on the cabin wall in a side-front coupled view to observe the yaw angle of the four light sticks, the location of which are respectively denoted as TP1#, TP2#, TP3# and TP4#, shown in
Figure 24. The camera has the same parameters as in the model validation section. Image sequences of the stick motion and corresponding wind pressure were simultaneously measured respectively by the camera and pitot T-tube. Thereafter, a video processing algorithm was implemented in MATLAB to identify each moving stick and determine their respective angular displacements.
In the experiment, five wind tunnel speed cases were set from 0 m/s to 25 m/s at intervals of 5 m/s. When the tunnel wind is 0 m/s, the detected wind speed is the wind flow from the external environment driven by the blower inside the cabin. During the 6 tunnel wind stages, the motion of light sticks was recorded and extracted into 24 image frames per second to acquire the time history of their yaw angle variations. Dynamic pressures of the pitot T-tube were collected by IMC DAQ system at a sampling frequency of 256 Hz. The dynamic pressure data were processed with low-pass filtering at a frequency of 40 Hz, and then used to determine the corresponding wind speed data according to the Bernoulli equation:
where
is the wind speed (m/s),
is the dynamic pressure (Pa), and
is the atmospheric density, 1.225 kg/m
3.
5.2. Results and Discussion
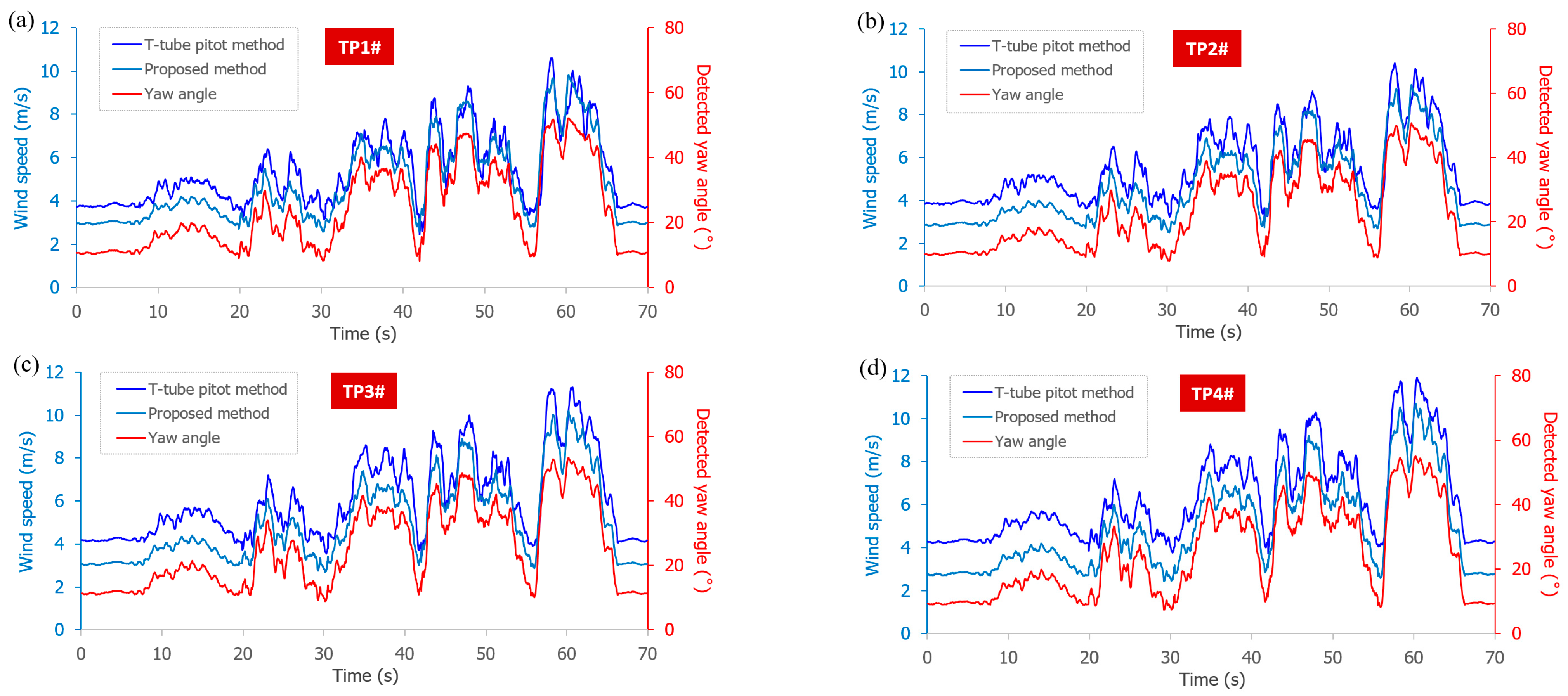
The detected yaw angles of the light sticks, the corresponding calculated wind speeds, and the measured wind speed based on the T-tube pitot method at the four test points TP1#, TP2#, TP3#, and TP4# are given in terms of time-history curves (
Figure 25). Encouraging agreement is observed in the variation trend between the proposed method and the T-tube pitot method.
As seen above, during the first 8 s when no wind is blowing in the tunnel, the sticks stay in a constant yaw angle due to the steady flow driven by the inner blower from the outside environment. When the tunnel wind increases to 5 m/s, 10 m/s, 15 m/s, 20 m/s, and 25 m/s, the sticks displace to-and-fro, accordingly, with good response to prevailing wind fluctuation detected by the T-tube pitot. However, wind speed detection via the proposed method is smaller than that detected by the T-tube pitot method and there is also a slight time delay in the peak response of the proposed method. Because the motion of the stick is mainly influenced by the interplay between its deadweight, gravity, and wind pressure, as the wind speed increases, the response time also generally climbs because it takes longer for the stick to find a new equilibrium state from a higher starting speed, as gravity forces it to return. Furthermore, in general, the stick rises almost steadily from the first instance of a speed increase, fluctuates around the peak speed for the same equilibrium-finding reason, before it falls at the end of the test case. At every increase in wind speed, the stick rises almost steadily, which can also be observed in the pitot measurement. The T-tube method also appears to be more sensitive to sharp variations in the wind speed. While the proposed method follows the trend closely, it does not capture the peaks as sharply because, for some split-second, it needs to rise or fall, while continually pushing towards an equilibrium state that continues to change. In contrast, the T-tube pitot method has no moving parts and so directly senses the pressure as it varies over time.
In addition, and as is evident from the yaw angle trend, increasing and decreasing according to the prevailing wind speed, measurement beyond critical angle limits did not arise since the model adopted was front-view dominated where limits are (Equation (25)), which is the maximum.
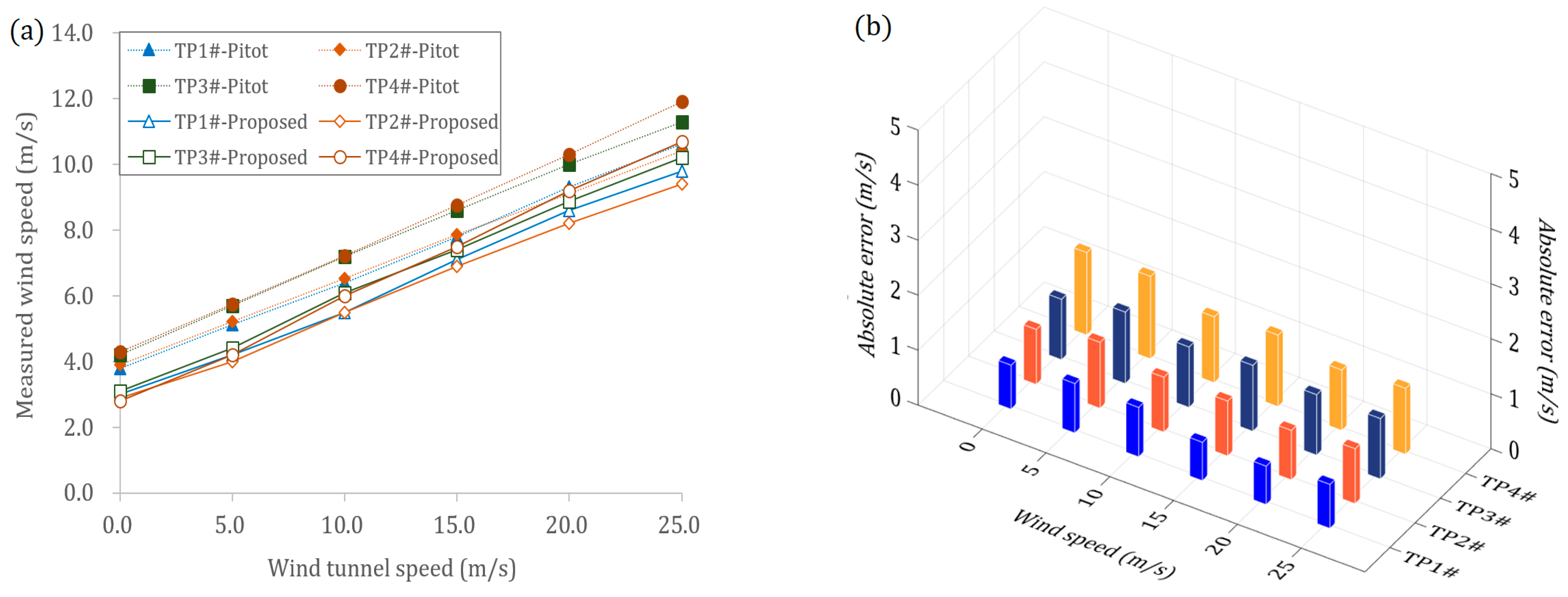
By calculating the absolute error between values detected by the proposed method and those expected by the T-tube pitot at each test point, the Root Mean Square Errors (RMSEs) are ±0.8 m/s, ±1.01 m/s, ±1.2 m/s, and ±1.4 m/s, respectively, for TP1#, TP2#, TP3#, and TP4# (
Figure 26) when the maximum yaw angles are detected at 52.1°, 50.7°, 53.5°, and 55.1°. The two methods agree well, although the proposed method is offset lower by about 0.73 m/s on average from the T-tube pitot method. This offset may be due to the inaccurate estimation of the T-tube pitot orientation [
25,
26].
The results comparison between the two methods at the four test points shows a mean absolute error of 1.1 m/s. The imperfectly uniform distribution of wind pressure, inaccurate estimation of the T-tube pitot orientation, and image-processing-related errors are suspected to account for the relative differences in the measurement results seen at the different test points. The low RMSE values demonstrate the robustness of the proposed method to measure wind speed with good response time.
6. Conclusions and Outlook
In this work, a novel wind speed measurement methodology is proposed by visually identifying the wind-induced motion of lightweight sticks. The presented model is validated by a designed simulation set-up for a theoretical model and applied in wind tunnel tests in a stationary inner equipment cabin of a high-speed train. The conclusions derived are as follows:
(1) Imaging models are given between the yaw angle, wind direction, and imaging length, as well as the orientation of the light stick target, when the camera is respectively placed at its bottom, side, and front, in pure and coupled imaging views. The models were validated by using a simulation set-up with multiple revolute joints to acquire different yaw angle and wind direction cases, in which the maximum error is no more than 3.4°.
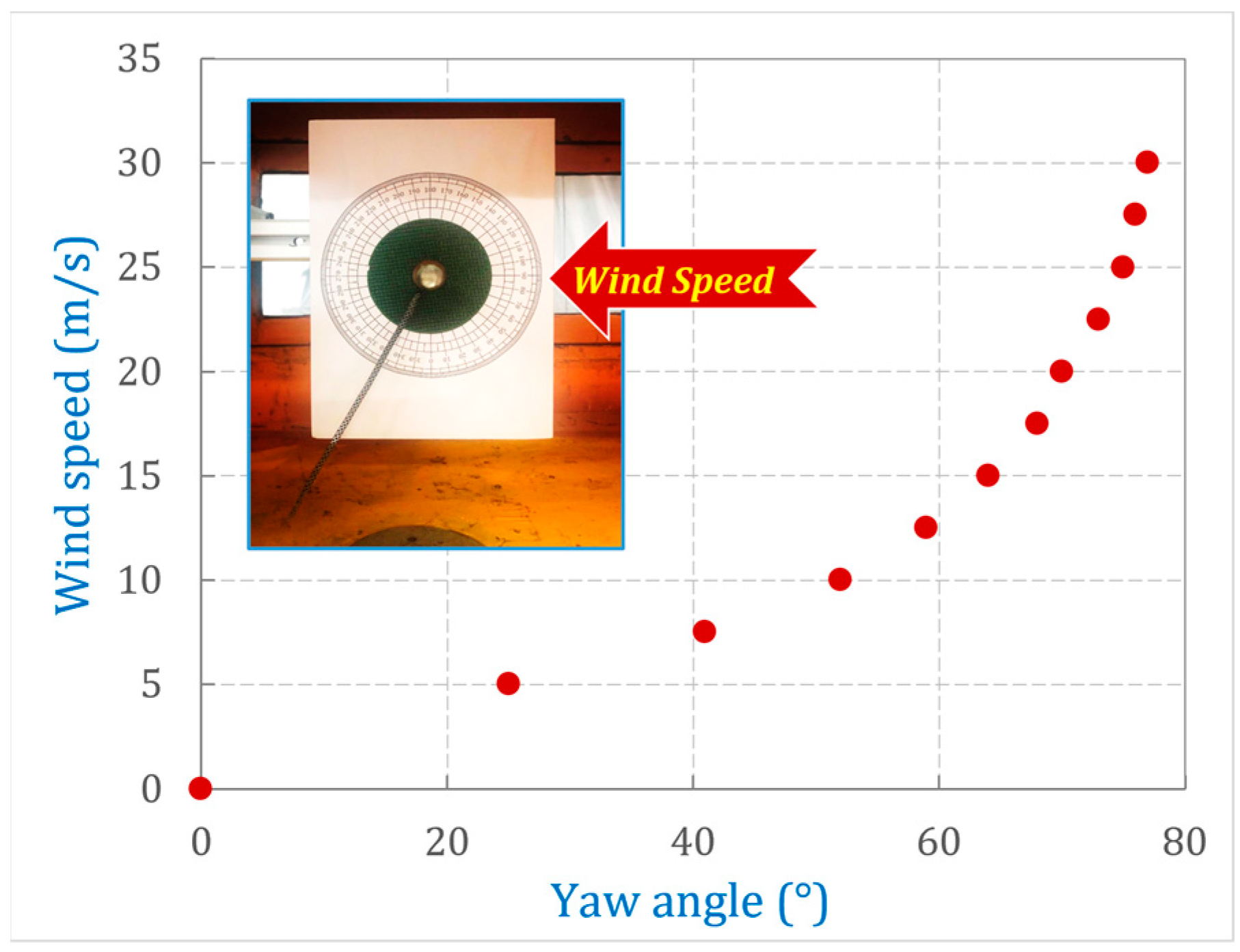
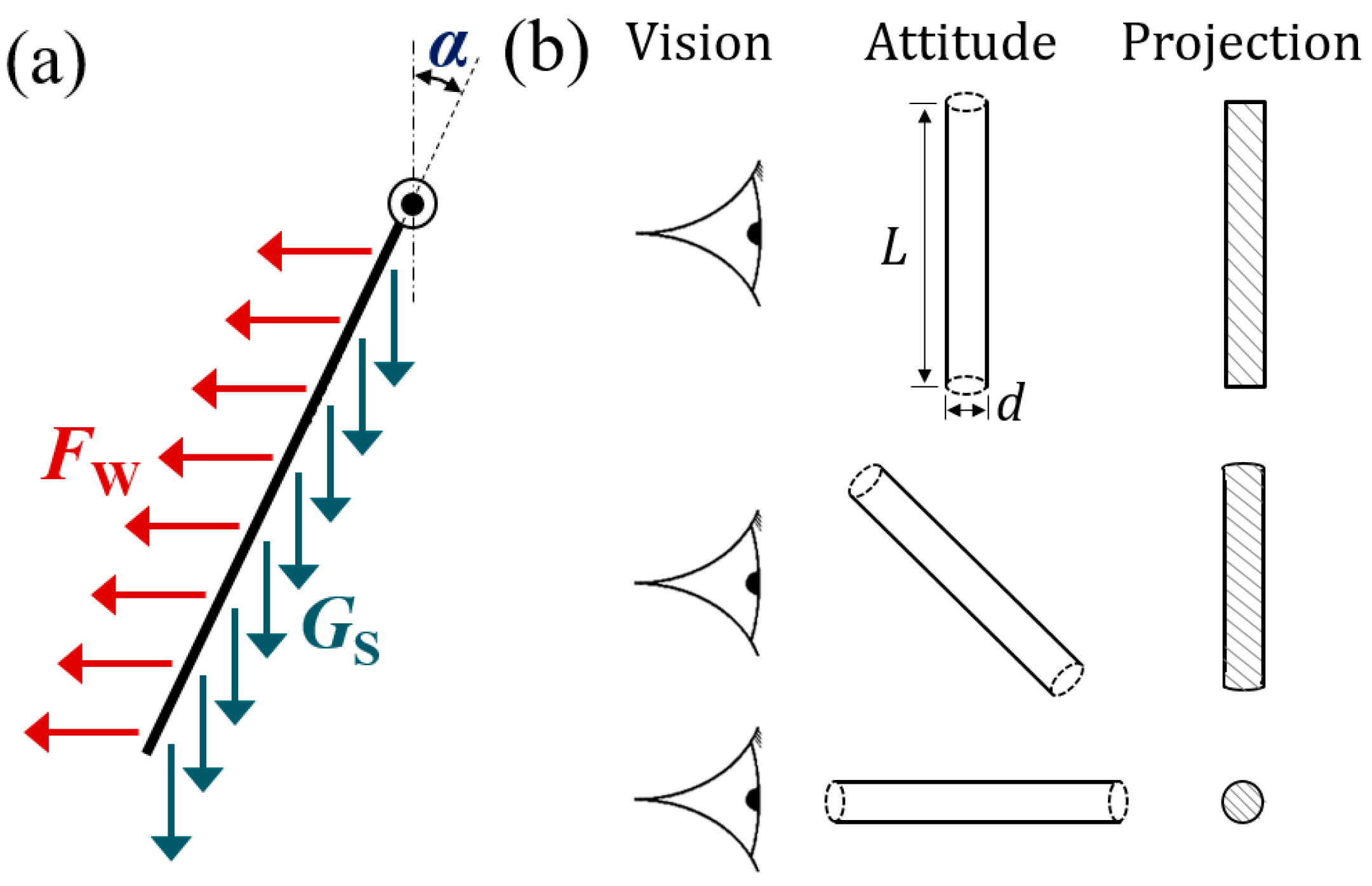
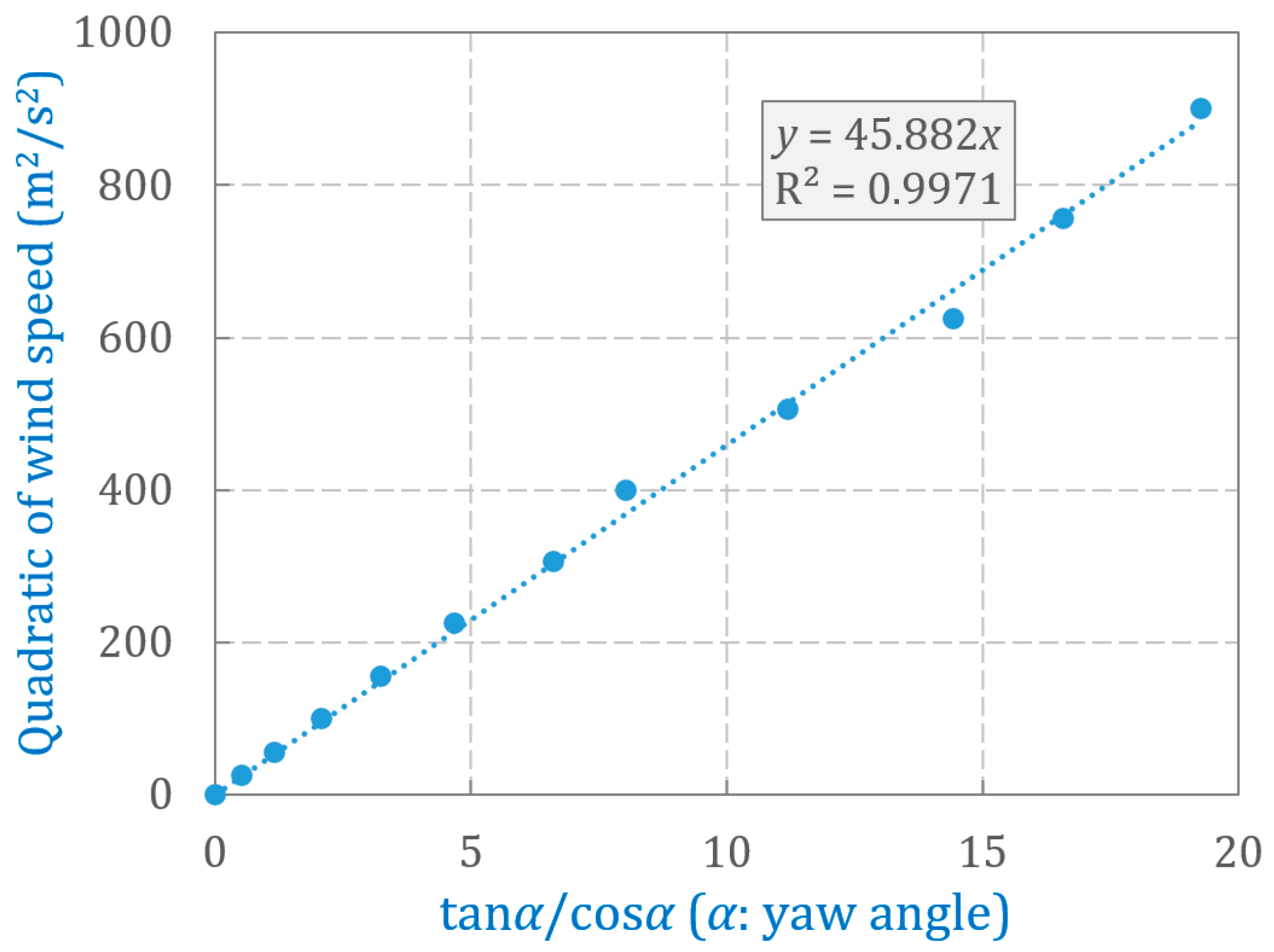
(2) The mathematical relationship between the stick yaw angle and the wind speed was calibrated through wind tunnel tests, where a linear relationship was observed between the quadratic power of the wind speed and the compound trigonometric function of the yaw angle. The derived relationship is also explained by a mechanical formulation based on the force equilibrium of a hanging stick subjected to wind pressure and its gravity force.
(3) In the application of wind speed measurement in the limited space of an inner equipment cabin of a high-speed train, the proposed method shows good agreement with T-tube pitot detections. The error is no bigger than ±1.1 m/s in average RMSE at all test points in wind tunnel tests compared to the standard T-tube pitot readings, which indicates that the developed method provides an accurate and economic option for monitoring 2-D wind speed in a confined space.
(4) Future work will focus on addressing the vertical wind speed component that will affect the stick yaw angle detection, by adding more information besides the yaw angle and projection length of the stick. We will also work on grouping different light sticks by relating their geometry and mechanical parameters with the wind speed measurement range to accommodate more complex application circumstances.

 ,
, 


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}