
Theoretical Evaluation for Soil Thrust of Single-Track System over Clay Slope via Upper Bound Analysis


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Upper-Bound Solution
- A soil thrust of a single-track system under sloped ground conditions was investigated based on an upper-bound analysis;
- The overall stability of a vehicle in terms of bearing capacity and deformation was not considered;
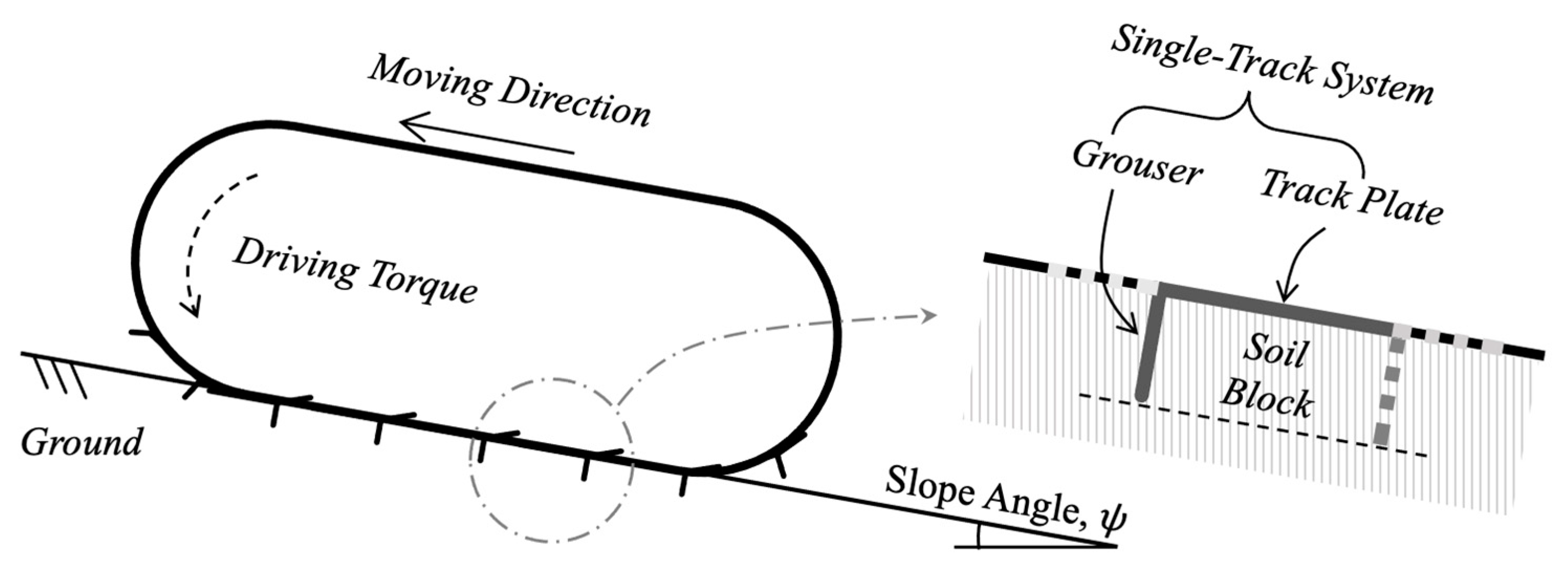
- Three potential failure modes (block, triangular-wedge, and trapezoidal-wedge) were considered between a single-track system and clay slope;
- The plane-strain condition with an undrained state was also postulated;
- A rigid single-track system with the homogeneous ground conditions of the Tresca model with the associated flow rule was assumed.
3. Upper-Bound Solution for Different Potential Failure Modes on a Clay Slope
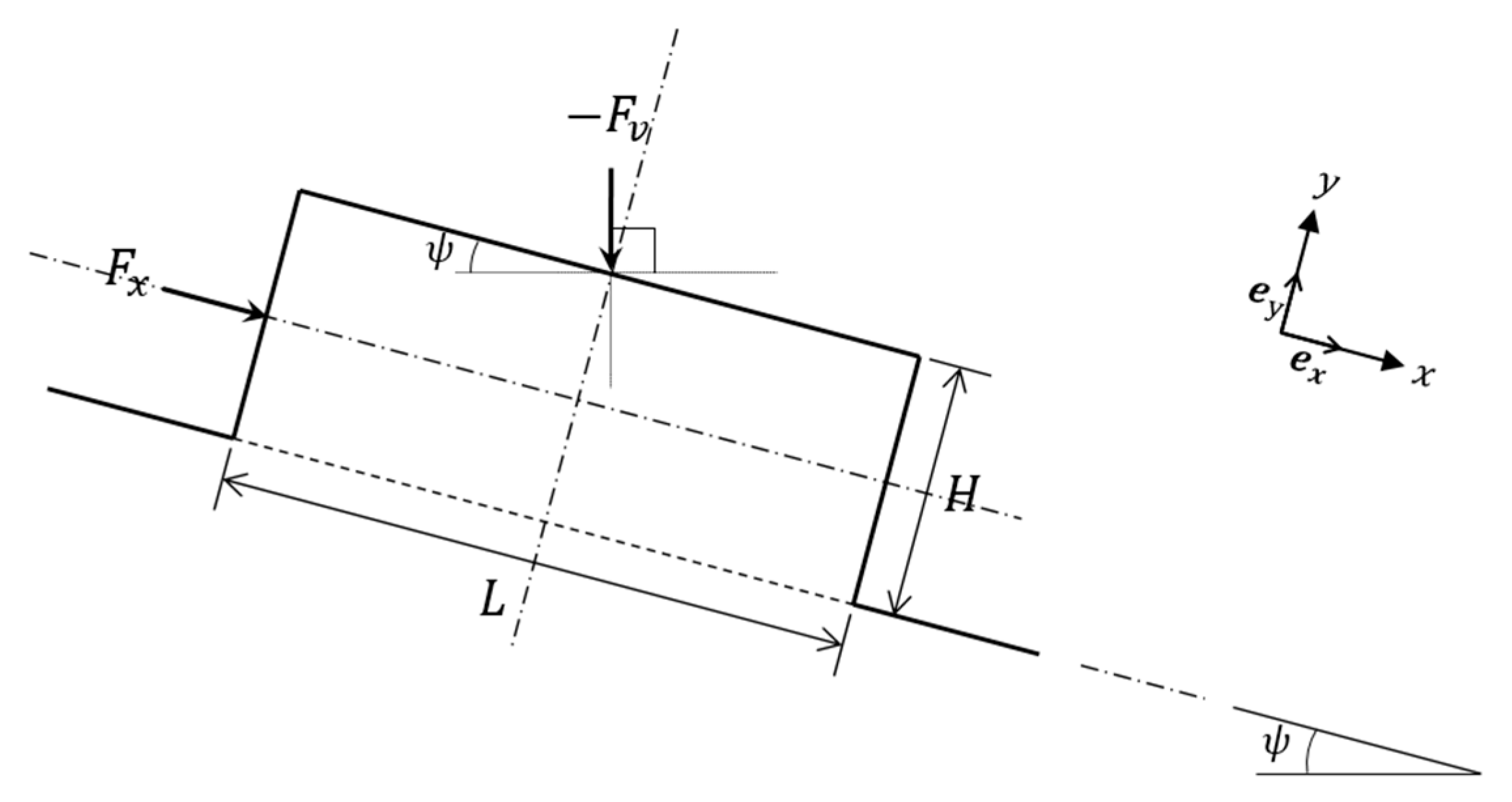
3.1. Block Failure
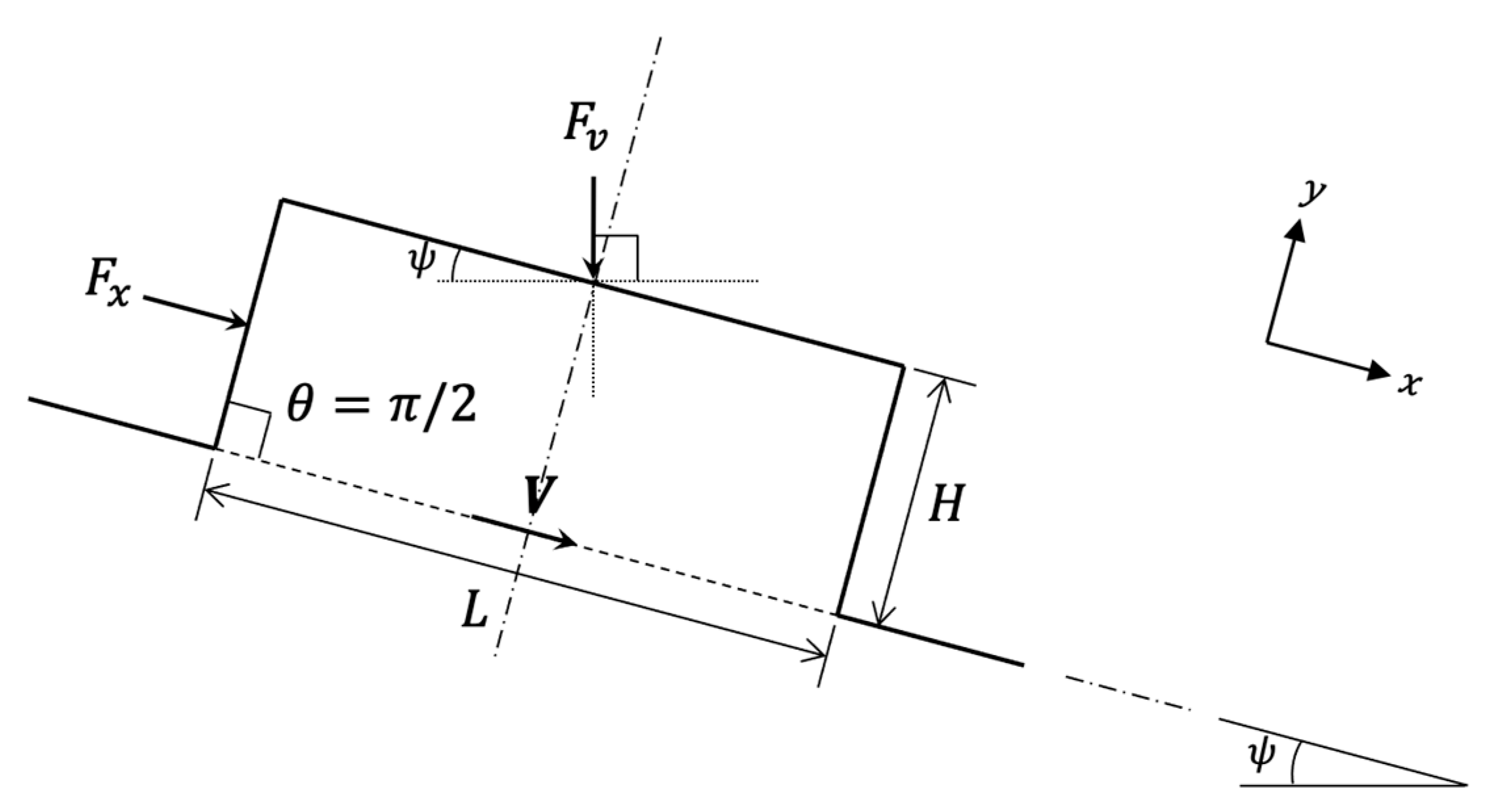
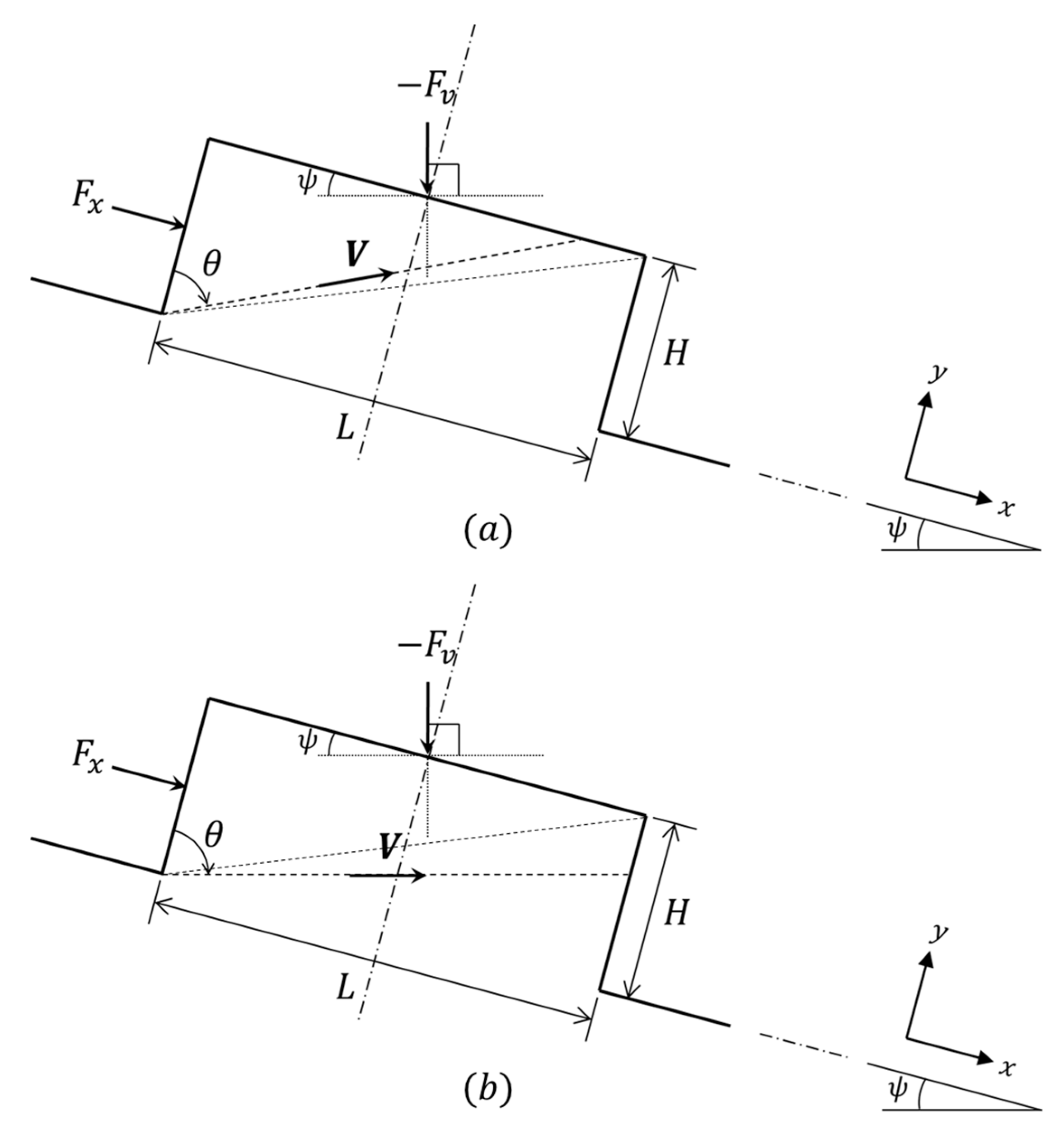
3.2. Triangular-Wedge Failure
3.3. Trapezoidal-Wedge Failure
4. Conclusions
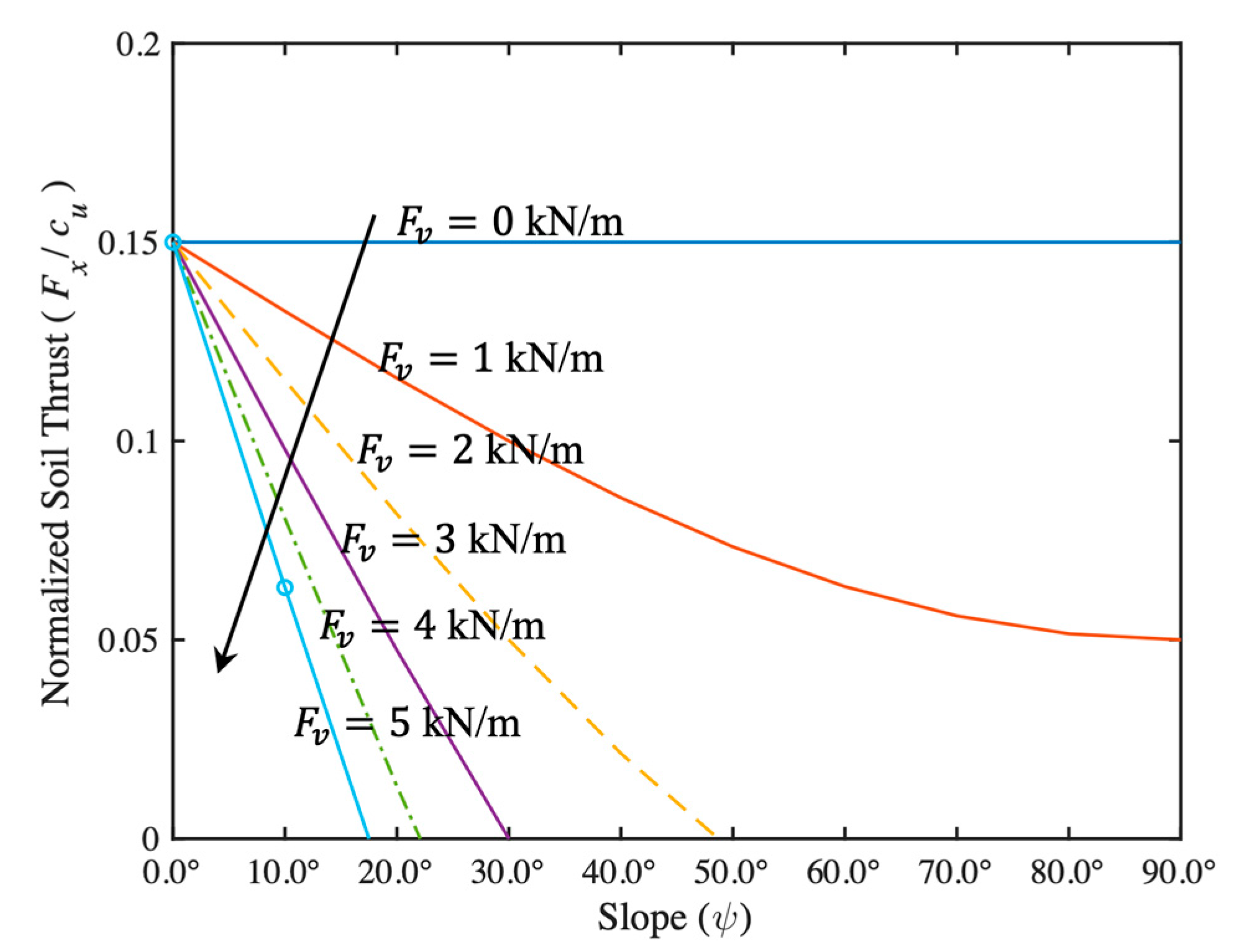
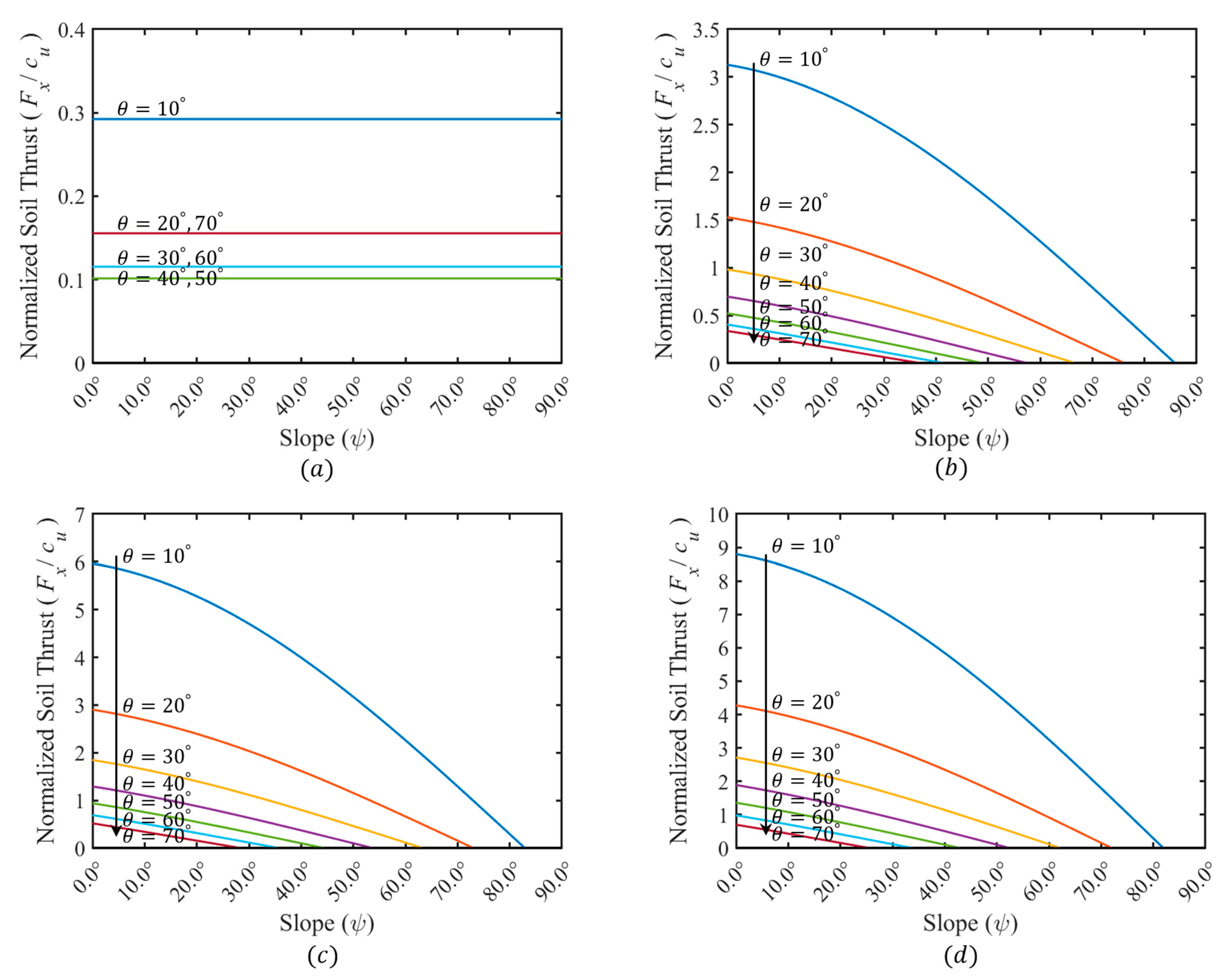
- Block failure mode: The soil thrust decreases as the slope angle increases, provided that there is the weight of a vehicle. The critical weight of a vehicle associated with a single track can be also determined, which yields the condition where the soil thrust becomes zero under the given clay slope;
- Triangular-wedge failure: The critical soil thrust depends on the vehicle weight and the slope angle. Overall, the soil thrust decreases as the slope angle decreases;
- Trapezoidal-wedge failure: this failure mode cannot be established on a clay slope regardless of the inclination angle.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wong, J. An introduction to Terramechanics. J. Terramech. 1984, 21, 5–17. [Google Scholar] [CrossRef]
- Bekker, M.G. Mechanics of locomotion and lunar surface vehicle concepts. SAE Trans. 1964, 72, 549–569. [Google Scholar]
- Angelopoulos, V. The ARTEMIS Mission. Space Sci. Rev. 2011, 165, 3–25. [Google Scholar] [CrossRef]
- Oravec, H.A. Understanding Mechanical Behavior of Lunar Soils for the Study of Vehicle Mobility. Ph.D. Thesis, Case Western Reserve University, Cleveland, OH, USA, 2009. [Google Scholar]
- Asnani, V.; Delap, D.; Creager, C. The development of wheels for the lunar roving vehicle. J. Terramech. 2009, 43, 89–103. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Kim, J.Y.; Tran, N.H. A study on an underwater tracked vehicle with a ladder trencher. Ocean. Eng. 2016, 127, 90–102. [Google Scholar] [CrossRef]
- Baek, S.H.; Shin, G.B.; Chung, C.K. Experimental study on the soil thrust of underwater tracked vehicles moving on the clay seafloor. Appl. Ocean. Res. 2019, 86, 117–127. [Google Scholar] [CrossRef]
- Bekker, M.G. Theory of Land Locomotion; University of Michigan Press: Ann Arbor, MI, USA, 1956. [Google Scholar]
- Grečenko, A. Re-examined principles of thrust generation by a track on soft ground. J. Terramech. 2007, 44, 123–131. [Google Scholar] [CrossRef]
- Grečenko, A. Thrust and slip of a track determined by the compression–sliding approach. J. Terramech. 2007, 44, 451–459. [Google Scholar] [CrossRef]
- Park, W.; Lee, K.; Park, J. The prediction of side thrust generated by grousers under track. J. Korean Soc. Agric. Mach. 2000, 25, 1–10. [Google Scholar]
- Woo, S.I.; Baek, S.H. Upper-bound analysis for soil thrust of single-tracked system over clay ground. Int. J. Geomech. 2020, 20, 06019023. [Google Scholar] [CrossRef]
- Lvov, E.D. Theory of Tractor; Machgyz: Moscow, Russia, 1952. [Google Scholar]
- Park, Y. Interaction of Soils-Tracked Vehicle. Ph.D. Thesis, Seoul National University, Seoul, Republic of Korea, 1996. [Google Scholar]
- Asaf, Z.; Rubinstein, D.; Shmulevich, I. Evaluation of link-track performances using DEM. J. Terramech. 2006, 43, 141–161. [Google Scholar] [CrossRef]
- Yong, R.N.; Fattah, E.A.; Skiadas, N. Vehicle Traction Mechanics; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Na, S.H.; Woo, S.I. Theoretical Evaluation for Soil Thrust of Single-Track System over Clay Slope via Upper Bound Analysis. Appl. Sci. 2023, 13, 5222. https://doi.org/10.3390/app13095222
Na SH, Woo SI. Theoretical Evaluation for Soil Thrust of Single-Track System over Clay Slope via Upper Bound Analysis. Applied Sciences. 2023; 13(9):5222. https://doi.org/10.3390/app13095222
Chicago/Turabian StyleNa, Seon Hong, and Sang Inn Woo. 2023. "Theoretical Evaluation for Soil Thrust of Single-Track System over Clay Slope via Upper Bound Analysis" Applied Sciences 13, no. 9: 5222. https://doi.org/10.3390/app13095222