4.1. Execution Time and Model Stability
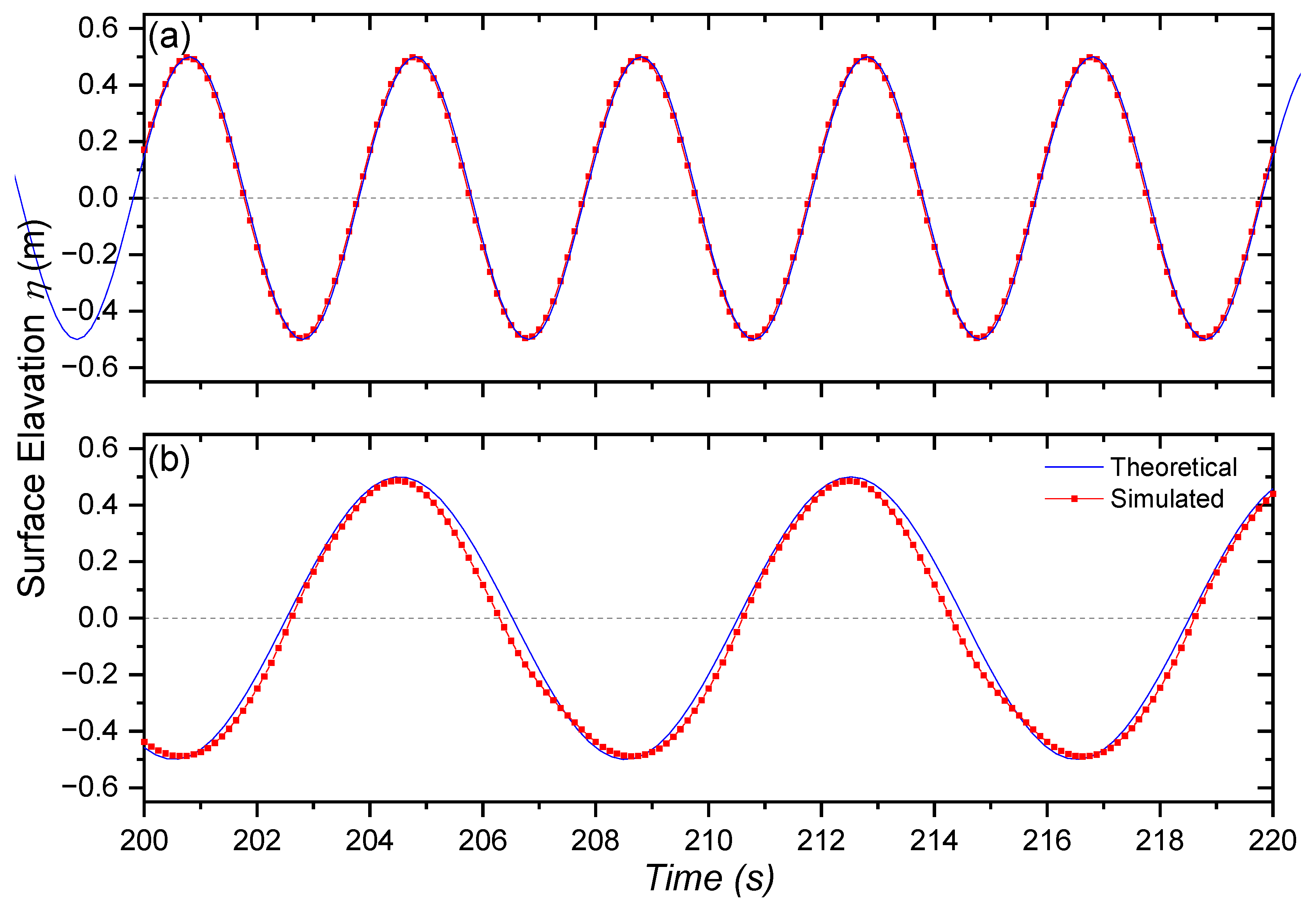
Figure 4 shows a comparison of the free surface data from the simulations and the theoretical results, calculated at the inlet boundary of the NWT. The free surface was accurately reproduced by OpenFOAM and the motion of the floating bodies under wave action was validated and corresponded well with the reported experimental data [
45,
46]. A similar case to the present simulation was recently presented by Qu et al. [
47], who studied the hydrodynamic forces of semi-submerged horizontal, rectangular, and circular prisms. In their validation process, the free surface of theoretical and simulated waves was compared, with a relative variation of 1.08%.
It can be seen from
Figure 4 that there is no significant difference between the theoretical and simulated free surfaces. Hence, the result from this simulation setup is considered to be in agreement with the quality of the mesh. The extra setup of the NWT to assess the set of subsequent cases was not necessary. As previously mentioned, the limitations of a simulated approach obliged us to treat the results of the current study with caution.
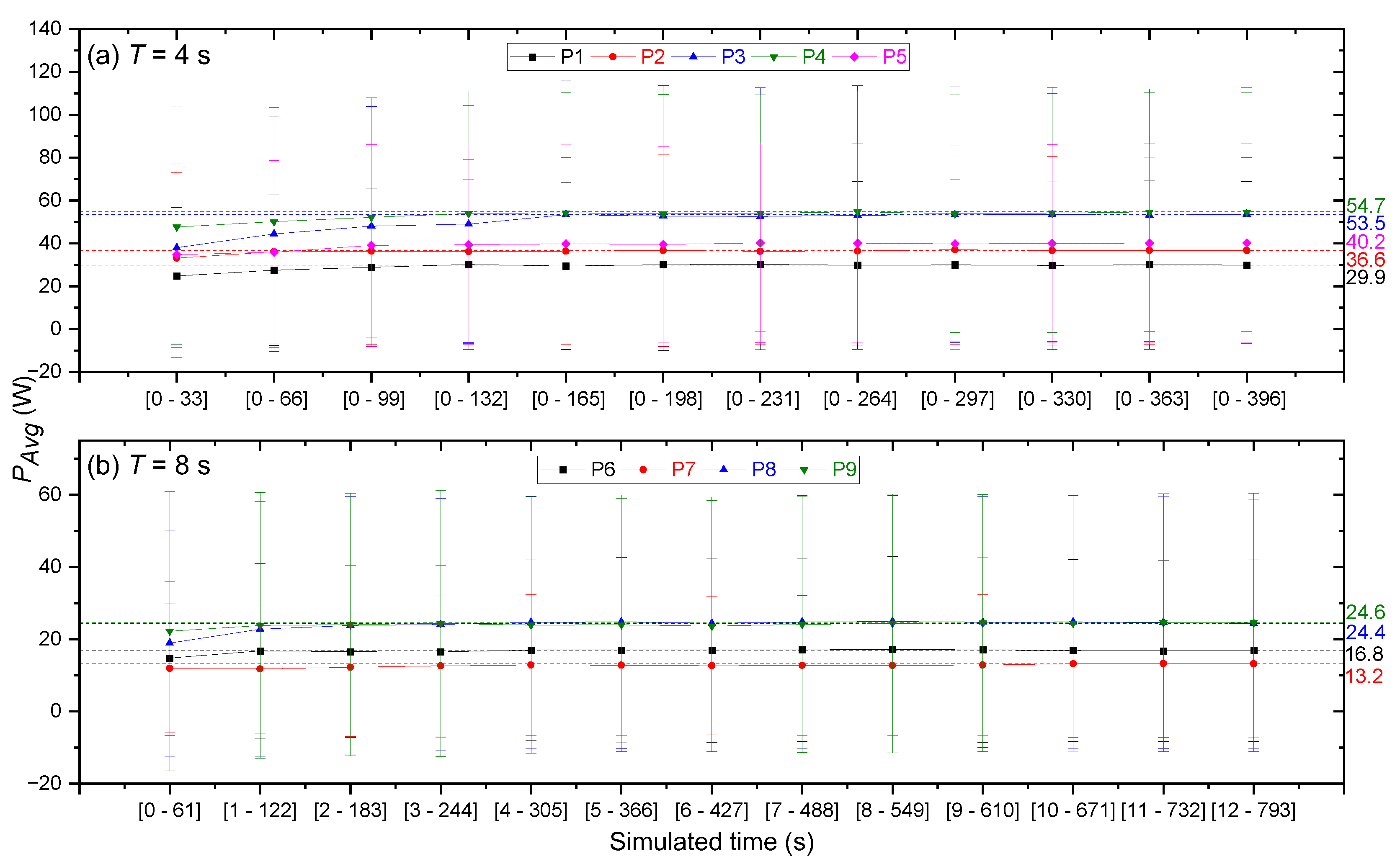
The results, in relation to the average power delivered, show that after a few wave periods, the averages and standard deviations of the model simulations do not change significantly, as shown in
Figure 5 (the parameters for each simulation from P1 to P9 are described later in
Section 4.2).
The execution time for the simulation of one hundred waves is presented in
Figure 5 and the computation time is resumed in
Table 3. It can be seen that the computation time increases as the buoy’s size increases. It is worth mentioning that the computation time using the overset grid method is double the runtime of that using the mesh morphing method, making the former considerably more demanding, computationally [
24].
4.2. Sensitivity Tests
This section describes the sensitivity analysis performed to identify the body motion parameters where the results were more sensitive and prone to changes. These parameters were
Acceleration Relaxation (
AR), which acts to reduce the acceleration directly;
Acceleration Damping (
AD), used to eliminate the divergence generated from sudden acceleration events and proportional to the magnitude of the acceleration;
Inner Distance (
ID), the extension of the region of motion of the fluid around the solid body; and, finally,
Outer Distance (
OD), which refers to the extent of the mesh transformation region around the body. The
inner and
outer distances are equivalent to diffusivity; however, as a function of distance. In reviewing the literature, not much information was found on these body motion parameters and few authors mention the topic, e.g., Windt et al. [
22,
25] investigated
mesh morphing and
overset grid methods, comparing their results with the data from an experimental tank of the WaveStar device, inferring that the use of the
overset grid method is computationally more expensive and a thorough model setup is required; hence,
inner and
outer distances could be parameterized by the buoy’s radii or length. The adopted values here are within the ranges previously considered. The grid points in the range
ID < D < OD were deformed while the object was moving and, often, the
ID values were in the order of the boundary layer thickness, and
OD was limited by the nearest domain boundary [
48,
49].
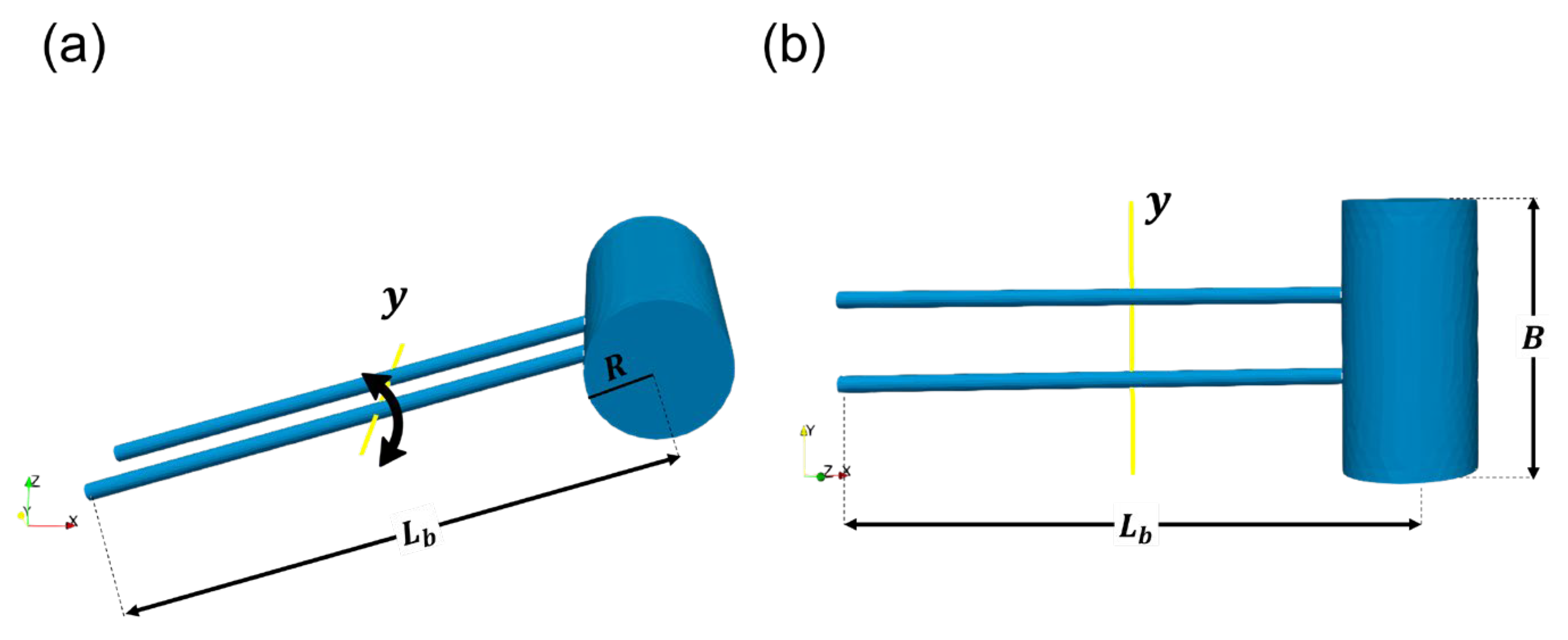
The analysis was performed considering the variation in the coefficients at a constant radius
R = 0.25 m, and the values are shown in
Table 4. The simulations were labeled as P1 to P9, performed for periods of 4 and 8 s. For each test, a total of 100 wave periods was simulated without crashing. The nine cases presented in
Table 4 were divided into five groups, testing a combination of different parameters.
Table 5 shows the P1–P9 tests that were labeled after the parameter examined in addition to the wave period. For example, in test OD-4T, cases P1 and P2 were compared, where only the
Outer Distance parameter was modified and the rest remained unchanged; test ID-4T analyzed the differences between P3 and P4, where only the
Inner Distance parameter was modified, and so forth. The analysis of the
AR parameter was omitted because no considerable effect was noted for the adopted values, which represent the rate of the decrease in acceleration.
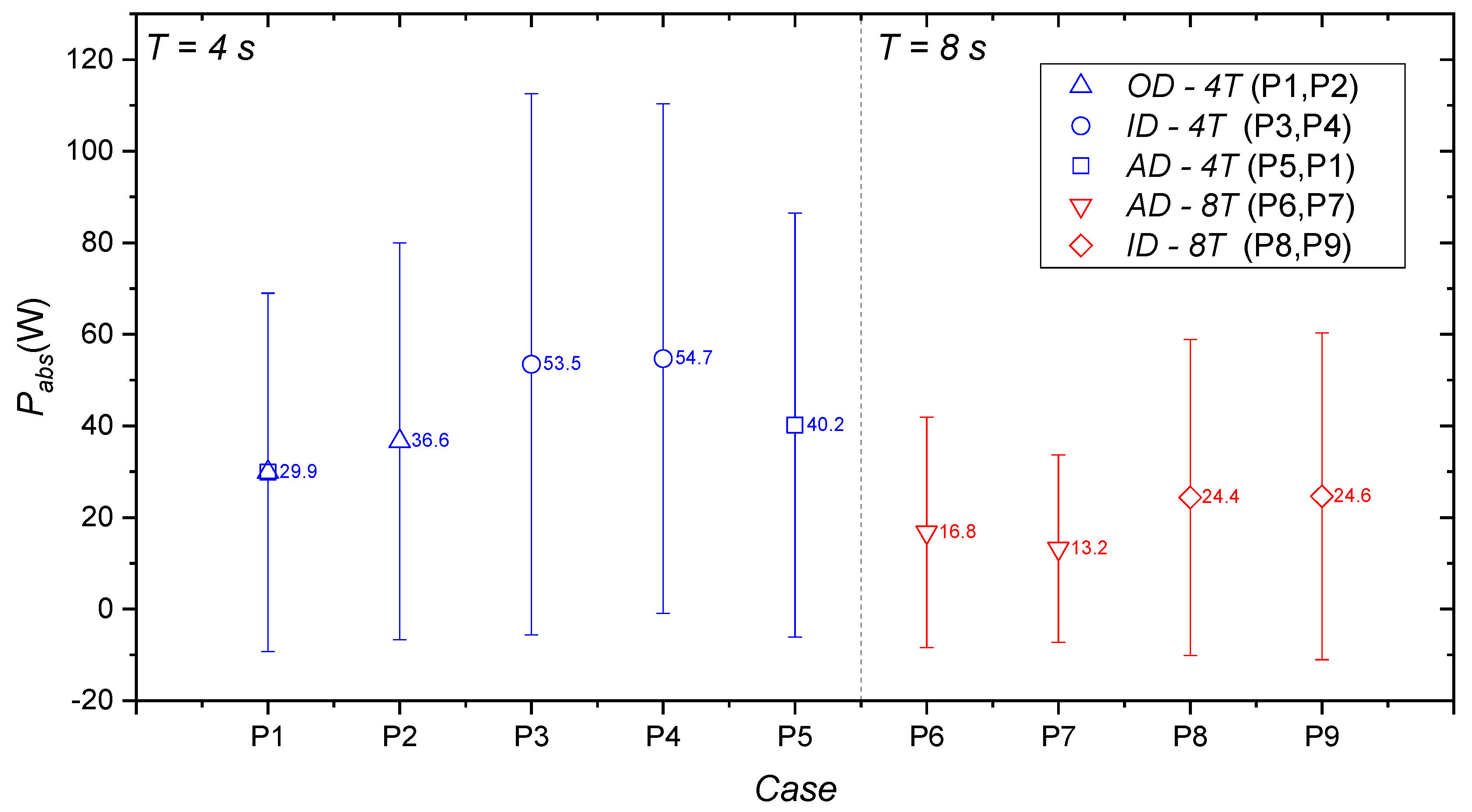
These tests were initially assessed by calculating the instantaneous power by multiplying the instantaneous values of the torque (
) and angular velocity (
): the output power was calculated as the average of the instantaneous power over the time of the simulation. The results for the nine cases are presented in
Figure 6; there were no significant differences in the execution times since all were performed with a 0.25 m buoy. As shown in
Figure 6, an increase in the
OD coefficient induces an increase in the average power and its standard deviation. Changes in the
ID did not show significant changes in the mean power (at least in the evaluated values). On the other hand, changes in the AD had considerable effects on the mean power and its standard deviation, at least for the shorter-period waves (4T) where the mean values were 34% higher. If a default value of AD = 1 was set, it produced the minimum value of the output power. In order to avoid a power overestimation, this would be the preferred setting.
To complement the results presented in
Figure 6, a further analysis was conducted by using the time series of other available variables, such as the center of mass of the buoy (
CofM_Z), its angular momentum (
Mom_Ang), its angular velocity (
Vel_Ang), and the torque. Since the output power depends on both the angular velocity and torque, values of power (
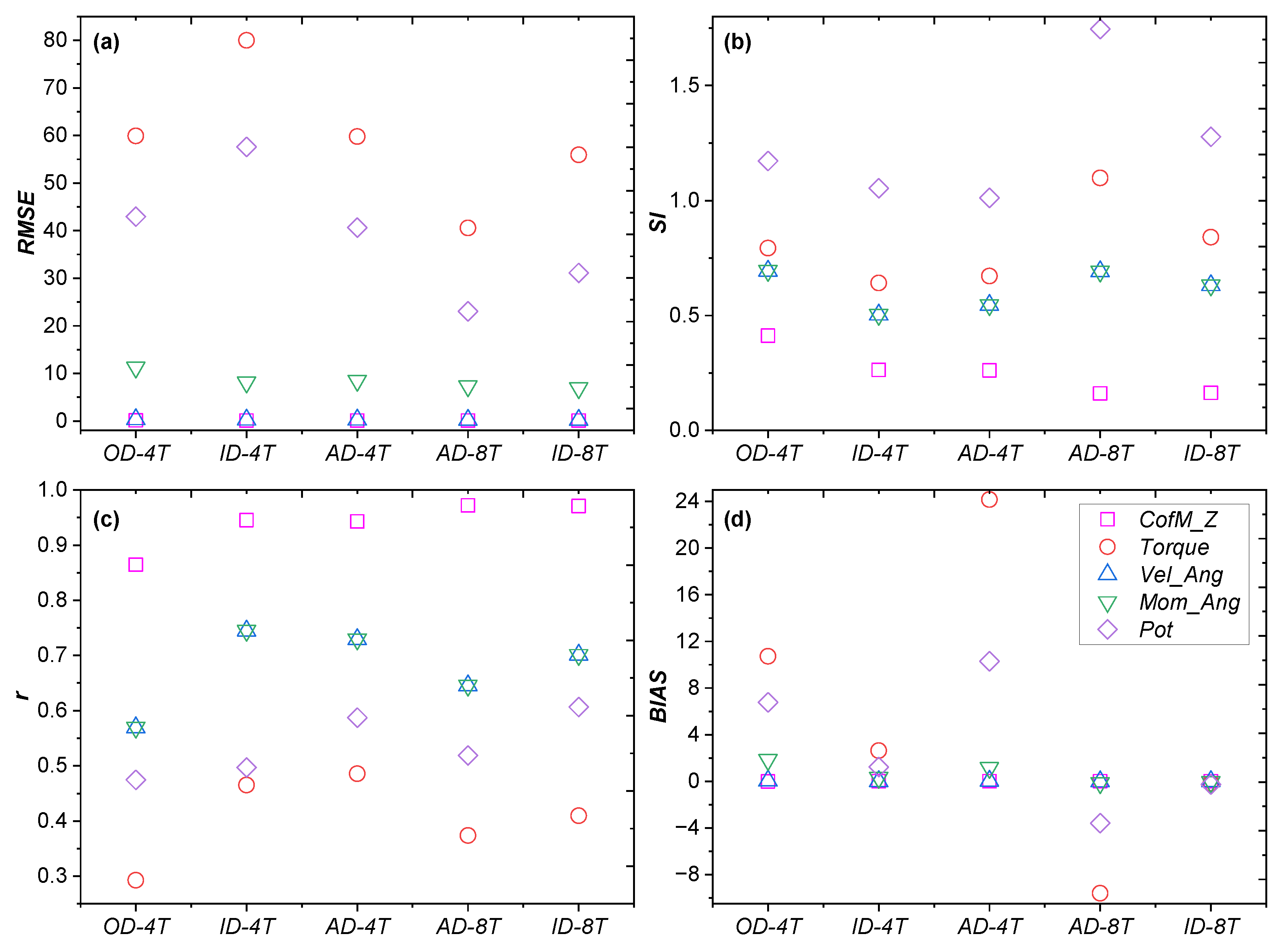
Pot) were also included in the analysis. The statistical parameters, calculated for each of the time-series pairs (test numbers in
Table 5), included (i) the root mean square error (
RMSE), to denote the magnitude of the error in the same units of the variable (small values of this parameter indicate a greater similarity between the cases in
Table 5); (ii) the scatter index (
SI), which indicates the error percentage, calculated by dividing the RMSE by the average of the model; (iii) the Pearson’s correlation coefficient, denoted as r and ranging from −1 to +1, which defines the linear relationship as negative or positive, or the absence of a correlation (r ~ 0); and, finally, (iv)
BIAS, a measure of the tendency for underestimation (overestimation) when negative (positive) values are found.
Figure 7 shows the results obtained from the statistical analysis. The center of mass (
CofM_Z) seems to be the best-performing variable, with low
RMSE and
SI values and a fairly high linear correlation, and showing very little effect of changing
OD,
ID, or
AD. On the other hand, the torque seemed to be the variable with the highest
RMSE values of all the tests performed, with the changes in
ID being those that affected the RMSE the most. Torque was also the variable that showed the lowest linear correlation r, especially for changes in
ID and
AD. Changes in the latter coefficient also had the highest values of positive bias (see
Figure 7d). The statistics for the angular velocity had fairly low
RMSE and
SI values, respectively, and its
BIAS was fairly close to zero. This is a great advantage since the calculations of power rely on both torque and angular velocity.
As no physical experiments were available for validation, the criteria for choosing the combination of parameters to use were those providing lower values of power BIAS and of power RMSE, and those avoiding high overestimations for the torque. Those characteristics were found in the tests where the
AD was fixed to the default value of 1 (P1 and P7). It was noted on several tests, performed but not reported here, that drastic changes in these parameters could induce the instability of the model through excessive mesh distortion. The results using the OpenFOAM model prove to be in agreement with the experimental data when the correct parameters are applied, with its respective assumptions and limitations [
50].
4.3. WEC Power Absorption
The values of the parameters from the sensitivity tests were then fixed in order to evaluate the changes in the buoy’s radius, systematically. These values were presented in the P1 and P7 cases in
Table 1 (
AR = 0.7,
AD = 1,
ID = 0.001, and
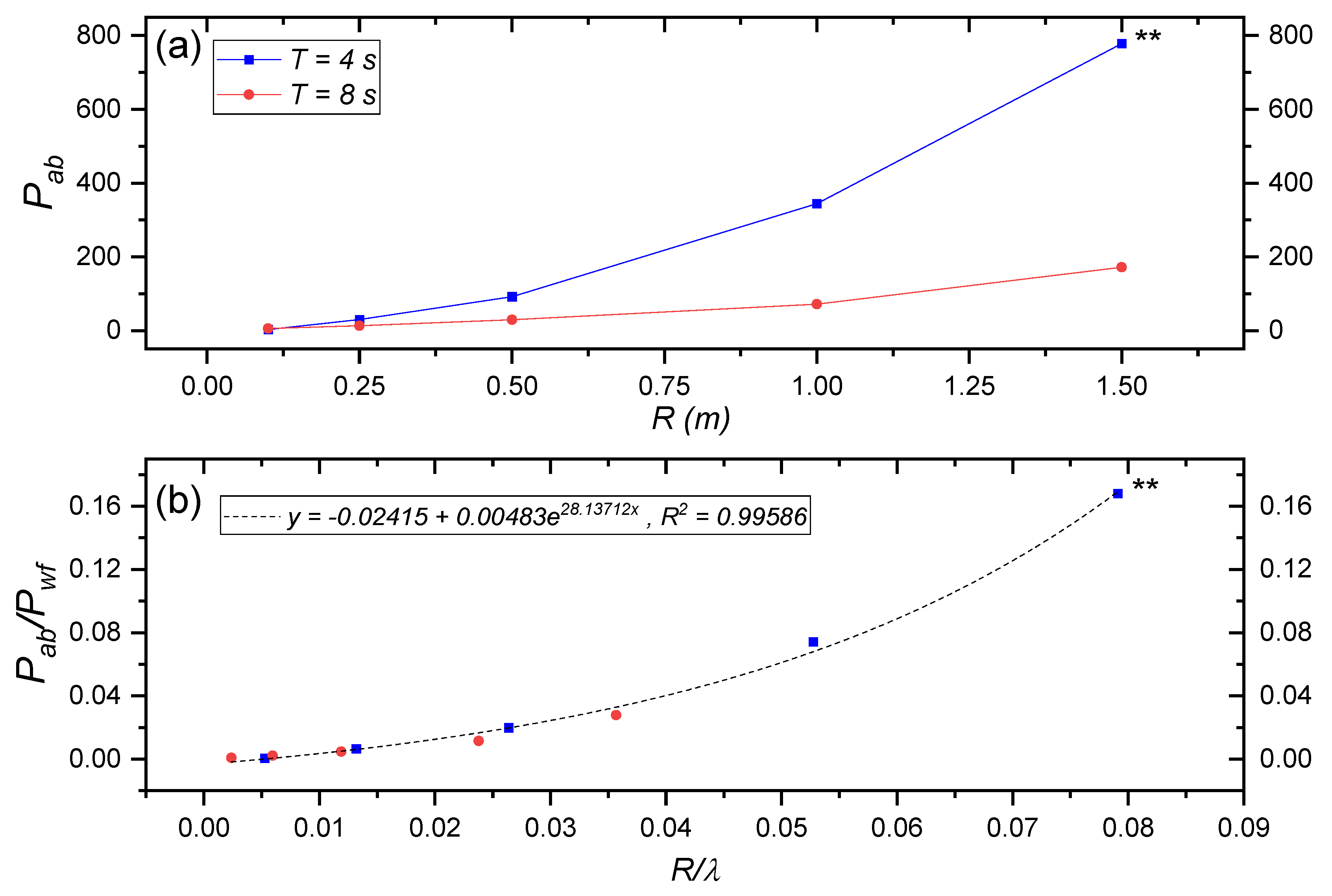
OD = 1.5). As we expected, the average power output increased with the buoy’s radius, as can be seen in
Figure 8a; perhaps, surprisingly, shorter-period waves (
T = 4 s) delivered considerably more average power with this buoy system than waves of longer periods (
T = 8 s). It is also apparent from
Figure 8a that 4 s waves induce an exponential power increase with an increasing buoy radius, while the power values for the buoy with longer-period waves (
T = 8 s) suggested a much slower increase rate. On the other hand,
Figure 8b seems to suggest that the capture efficiency (
-axis) of a buoy whose size is a given fraction of the wavelength (
-axis) would be very similar for both
T = 4 s and
T = 8 s waves. Here, is important to note that the 1.5 m case for
T = 4 s could not be run with a value of
OD = 1.5 due to instabilities caused by the buoy’s movement and increased size of the buoy on the mesh. Therefore, a value of
OD = 2 had to be adopted, which could imply a 1.2% error for the mean values of the average power absorbed (see values of
SI presented in
Figure 7b).
The results presented in
Figure 8 have significant implications for the assessment of wave energy availability, and also for the manufacturing of WECs of the type presented in this paper. For example, if we only rely on the results of the wave energy flux (Equation (4)) of a given site, to assess the wave energy availability, we would expect that a site with longer-period waves (i.e.,
T = 8 s) would generate more energy than a site with shorter-period waves (i.e.,
T = 4 s) per unit wave height. Nevertheless, in these experiments, using a
R = 1 m buoy,
T = 4 s waves captured considerably more energy, a factor of 4.82, than
T = 8 s waves (
Figure 8a). This factor seems to increase in an exponential fashion with an increased radius. This implies that, in order to achieve the same capture efficiency,
T = 4 s waves need much smaller buoy diameters than
T = 8 s waves, making the devices cheaper to manufacture. For example, to achieve a capture efficiency of 0.16 at a 3 m depth, a
T = 8 s wave would need a buoy with a radius of 3.36 m (
= 0.08), whereas of
T = 4 s wave needs a buoy half the size (1.5 m). Therefore, with the technology we tested in this paper, regions where shorter-period waves dominated (enclosed seas) generated more energy and with a cheaper device than regions dominated by longer-period waves. These results are in agreement with the results observed elsewhere [
51]. Consequently, with the results presented in this work, the availability of ocean wave energy has a high dependence on the technology used to harvest it, and should be considered in techno-economic assessments.
To assess the amount of energy absorbed by the system, the results obtained from the calculation of the bulk energy balance (Equation (12)) were analyzed, where the values of
could be interpreted as the amount of energy that was absorbed by the WEC or dissipated through turbulent processes.
Table 6 presents these results, compared to the energy transmitted through the buoy and reflected from it. The results of this analysis are consistent with the results presented in
Figure 6, where the amount of energy absorbed by the system subjected to
T = 4 s waves was considerably higher (~35%) than the energy absorbed by the same system, but subjected to
T = 8 s waves. It is clear that the amount of reflected energy was considerably minimal, something expected since the structure was floating on the surface.
4.4. Potential Effects of the WEC on Sediment Transport and Coastal Protection
Another implication of the results presented in
Table 6 concerns the floating buoy acting similar to breakwater by reducing the height of the waves reaching the shore. This would only result in a significant energy reduction if the distance to the coast and number of WECs were arranged appropriately. The values of
observed after the waves passed through the WEC were considerably reduced close to the buoy. As would be expected from the arguments presented in the previous section, the protective effect of the WEC would be greater for
T = 4 s waves than
T = 8 s waves, since the power absorbed from shorter-period waves is greater. That is, longer waves would have less attenuation when interacting with the WEC floating body, as observed with many floating breakwaters [
52].
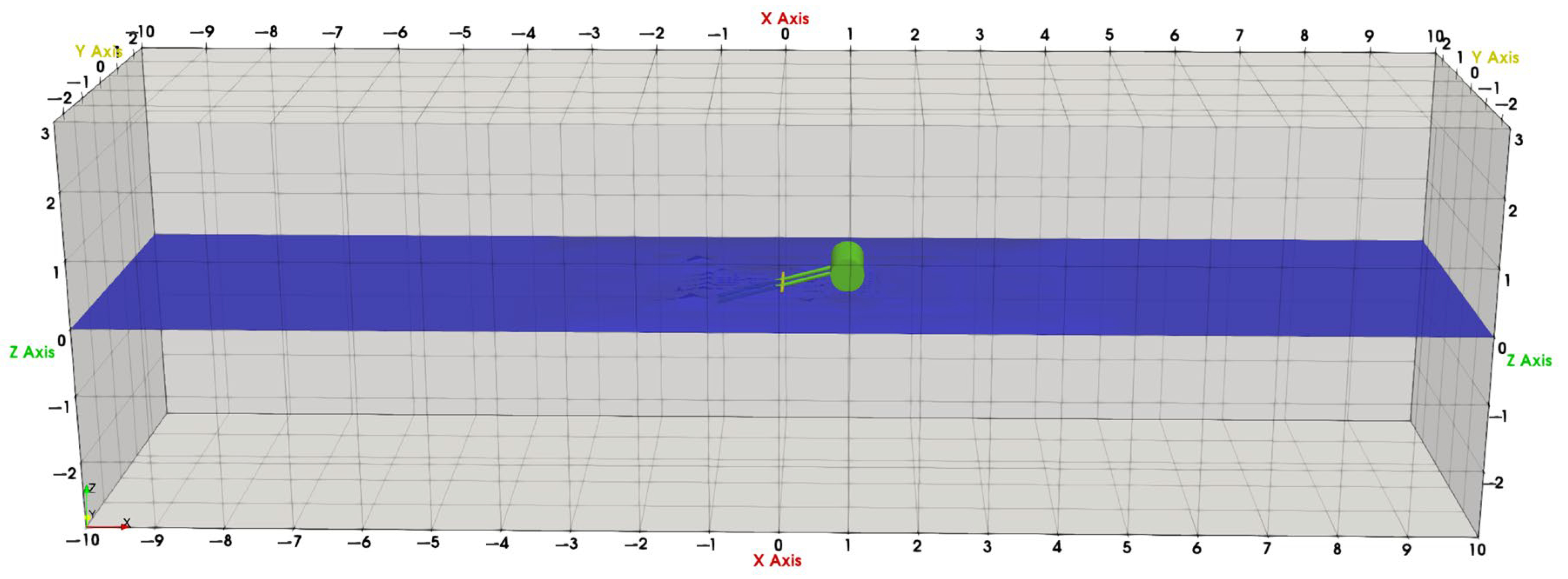
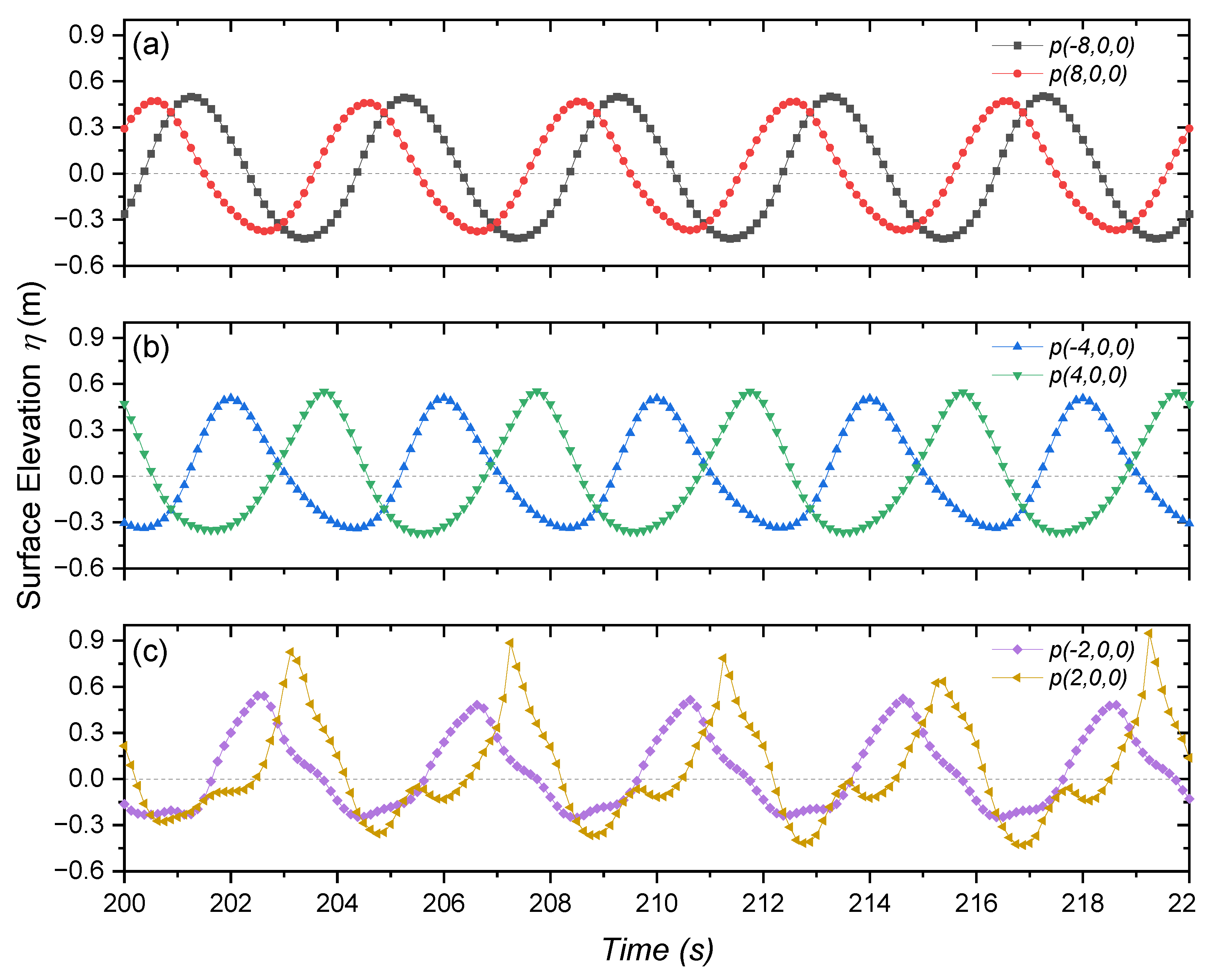
It is also important to analyze the behavior of the surface elevation in different parts of the NWT, since a wave’s shape is a good indicator of non-linear transfers of energy, which could have significant effects on sediment transport close to the shore. Surface elevation time series at different positions of the NWT are presented in
Figure 9 and
Figure 10. The wave gauge positions,
, where
is in the direction of the wave propagation, were established every meter from −10 to 10 m in the
direction, e.g., the third gauge (from left to right);
or
is in position
m. The position of the WEC was at
, with negative values to the left and positive to the right. All gauges were placed at the still water level. The free surface records for
and
T = 4 s are presented in
Figure 9. The gauges in the figure were symetrically selected before (
) and after (
) the buoy’s position. The free surface deformation in gauges
and
was due to the interaction of the waves with the buoy.
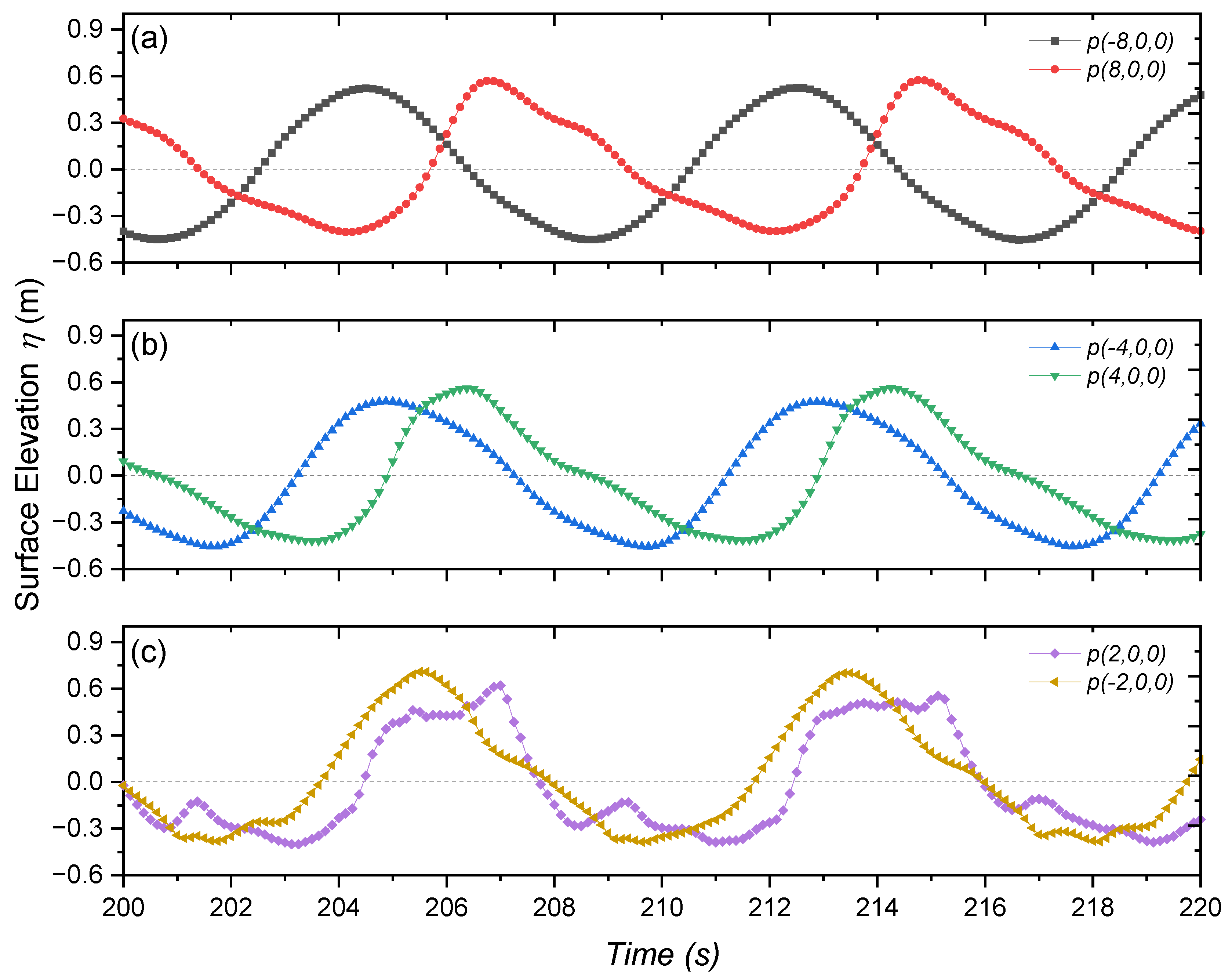
Figure 10 shows the same, but for
T = 8 s. Several studies have investigated free surface elevation with OpenFOAM, e.g., Zheng et al. compared the maximum crest elevation to both the first- and second-order Stokes theories, showing that the wave elevation predicted by the OpenFOAM simulation and the theory agree well [
53].
Figure 9a shows a fairly symmetrical wave record for the waves at the offshore-end of the buoy, which become increasingly skewed (horizontal asymmetry) with the waves at
m, the ones having the greatest deformation. The waves on the right-hand side of the NWT gradually recovered their sinusoidal shape, but with less height. For
T = 8 s waves (
Figure 10), the surface elevation profile starts by presenting less horizontal asymmetry, and the deformations observed closer to the buoy are less pronounced than those observed for
T = 4 s. On the right-hand side of the NWT, the waves develop a vertical asymmetry of an inverse saw-tooth shape, which is clearer in the waves farthest from the buoy, at
.
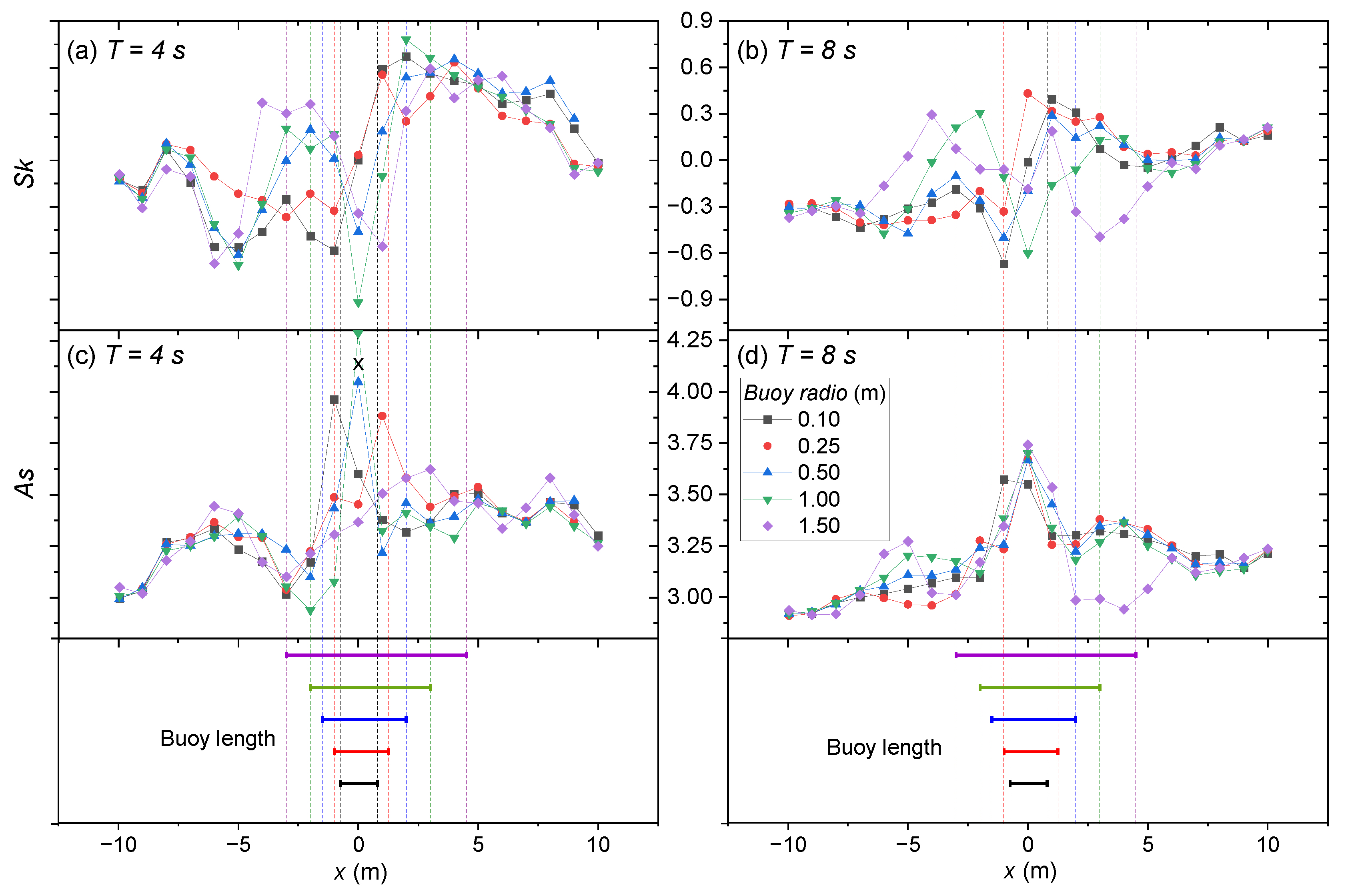
A more quantitative assessment of the waves’ shape can be performed by calculating the skewness and asymmetry of the waves. As these are associated with processes of sediment transport, the variable used for their evaluation was the near-bottom orbital velocity, rather than surface elevation. Skewness (
) is related to a horizontal asymmetry in the velocity shape, where the onshore directed orbital velocities are greater and of a shorter duration than the offshore directed orbital velocities, which are milder and of a longer duration (‘Stokes wave’, e.g.,
Figure 10c for
). This behaviour of the orbital velocities has been associated with prevailing onshore sediment transport [
11,
43,
54]. Onshore transport is also linked to vertical asymmetry (
), where waves are pitched forward with a saw-tooth shape (e.g.,
Figure 10a for
shows an inverse saw-tooth shape). Positive values of
, as defined by Equation (15), are associated with an onshore sediment transport contribution.
The values of skewness and asymmetry, as calculated using Equations (14) and (15), are shown in
Figure 11. For both wave periods, the values of
tended to increase considerably towards the buoy’s position, reaching a maximum value just after passing the buoy. From that point,
values decreased considerably to values close to 0.1, then increased again towards the end of the NWT. In the case of
T = 8 s waves, after passing the buoy, the increase in
was less prominent and attained values that were very similar to those reached at the buoy’s position. This tendency can be observed for all the buoys’ radii, implying that the increased onshore sediment transport would alleviate coastal erosion and improve beach accretion. The values of skewness were rather low, since the initial wave conditions only included monochromatic first-order Stokes waves.
The behavior of asymmetry (
) is presented in
Figure 11c,d. For this variable, similar results can be seen, with an increase in
close to the buoy. However, there are very important differences between
T = 4 s and
T = 8 s. With the former, the magnitude of the changes in
are very mild (increments of only 0.05) and the evolution of
is fairly flat, whereas with
T = 8 s, increments in
are greater (0.15) and have a fairly linear increment towards the end of the NWT. A comparison between
and
suggest that the changes in
would be more likely to transport sediment onshore than those in
.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}