



Fault Diagnosis of Wind Turbine Planetary Gear Based on a Digital Twin
Abstract
:1. Introduction
2. Establishment of a Digital Twin of the Wind Turbine Transmission System
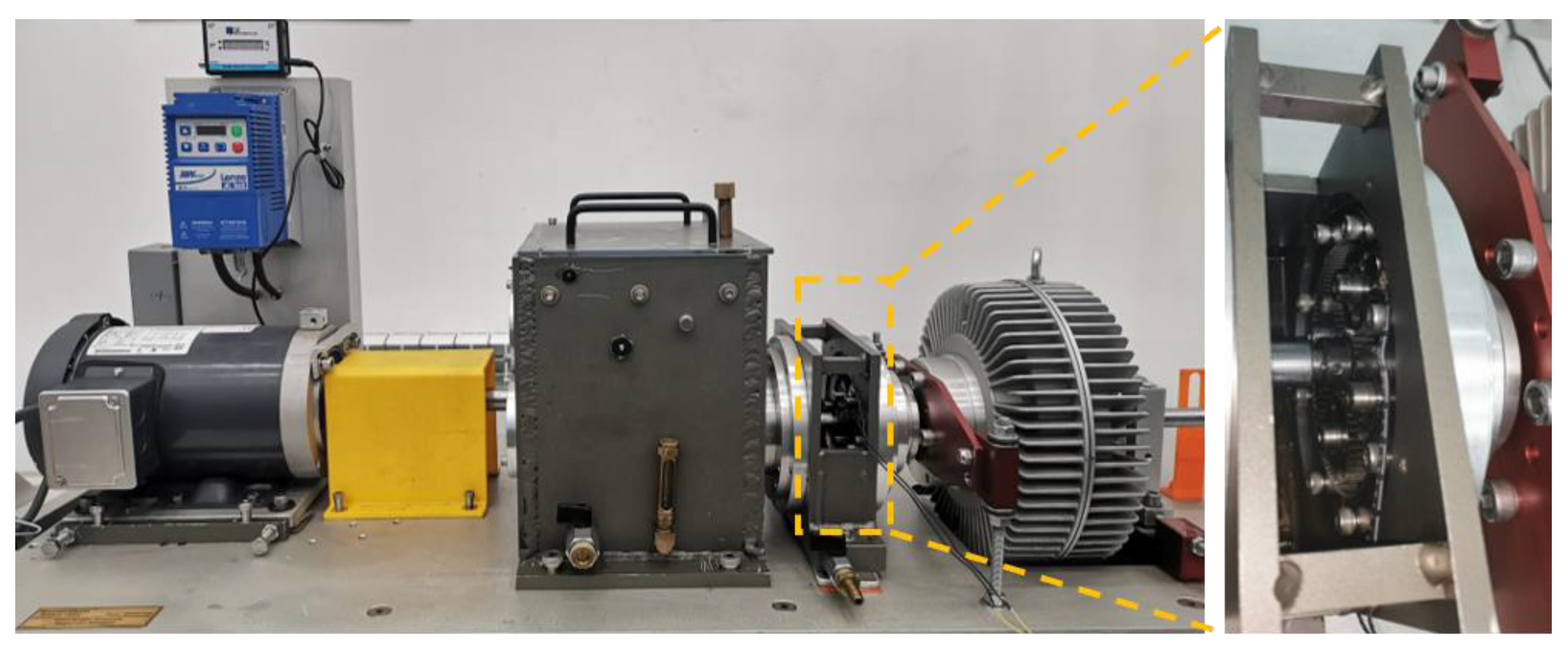
2.1. Wind Turbine Transmission System Entity
2.2. Twin Model of Wind Turbine Transmission System
- (1)
- Geometric model
- (2)
- Scene construction
- (3)
- Modeling of the object’s status
2.3. Composition of Twin Data
2.4. Data Transmission between the Virtual Model and Actual Wind Turbine Transmission System
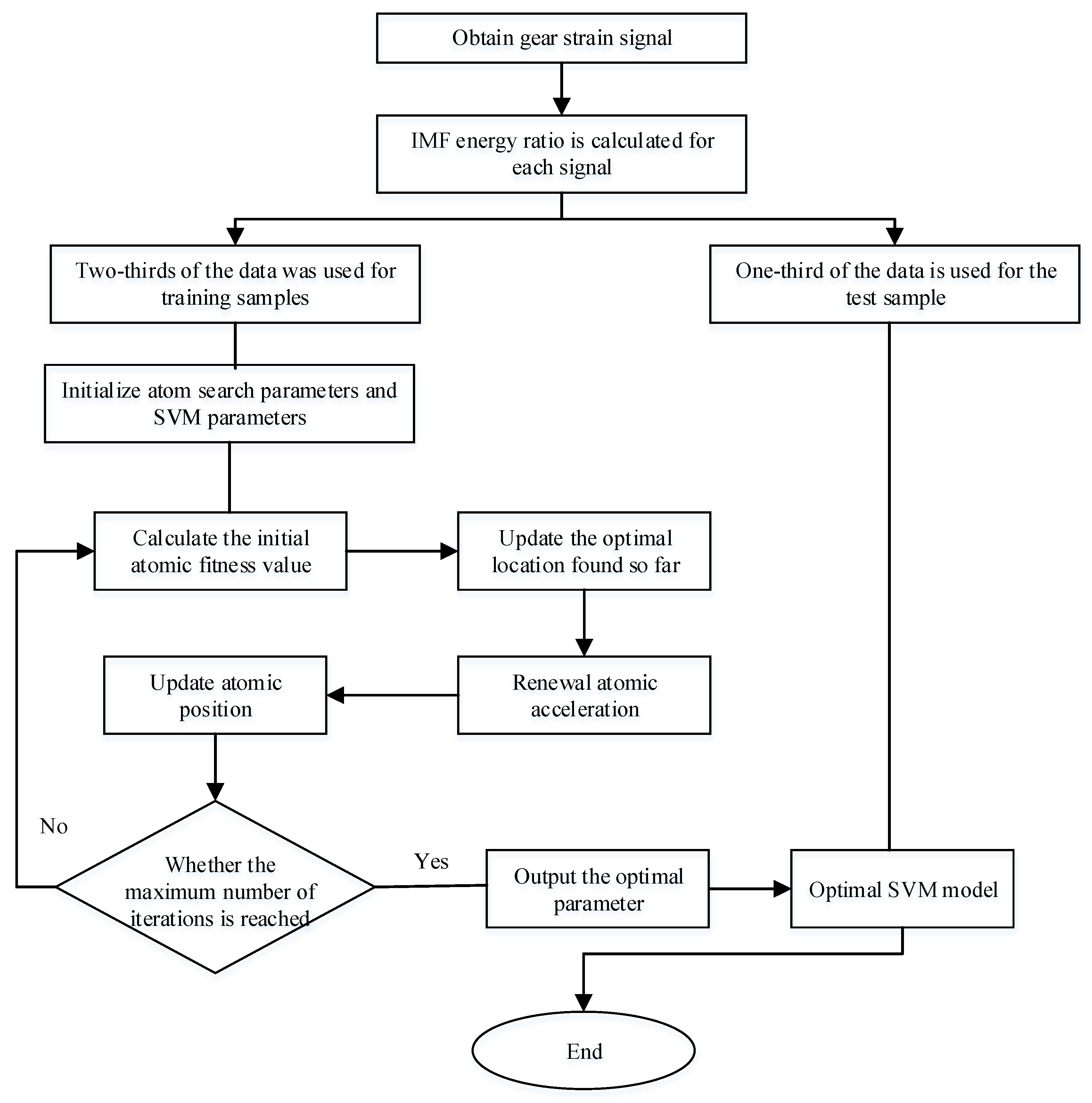
3. Fault Diagnosis Method Based on Digital Twinning
3.1. Establishment of Fault Diagnosis Model
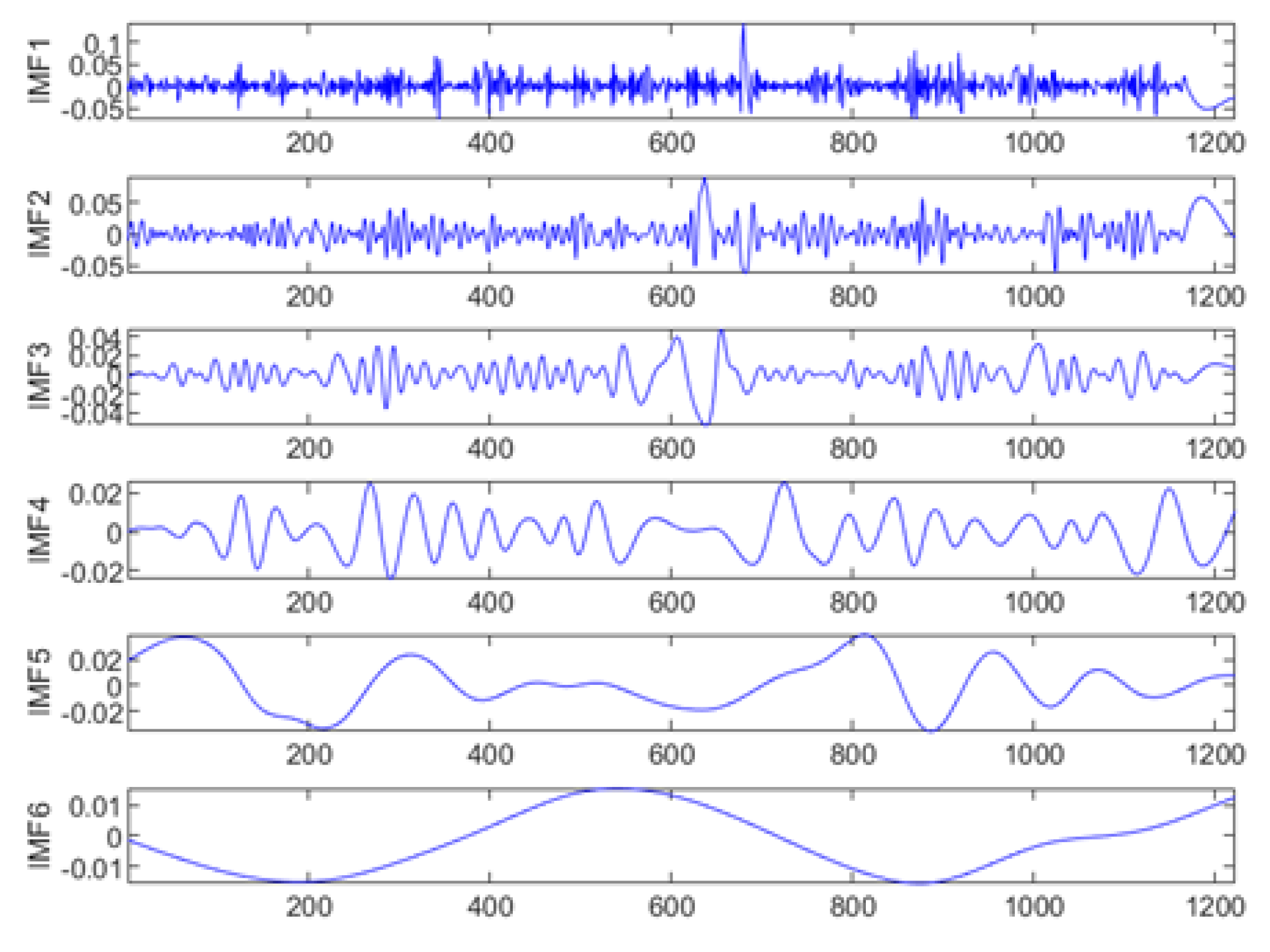
3.1.1. Feature Extraction Using Empirical Mode Decomposition
- (1)
- The signal is decomposed by EMD to obtain the IMF components .
- (2)
- The lines are summarized, and the energy entropy of each IMF is calculated:
- (3)
- The energy proportion of each IMF is obtained and normalized:
- (4)
- The IMF energy entropy is defined as:
3.1.2. Atom Search Optimization–Support Vector Machine Algorithm
- (1)
- Interaction force
- (2)
- Covalent bond force
- (3)
- Atomic acceleration
- (4)
- Iterative position update
3.2. Adjustment Method of Fault Diagnosis Model
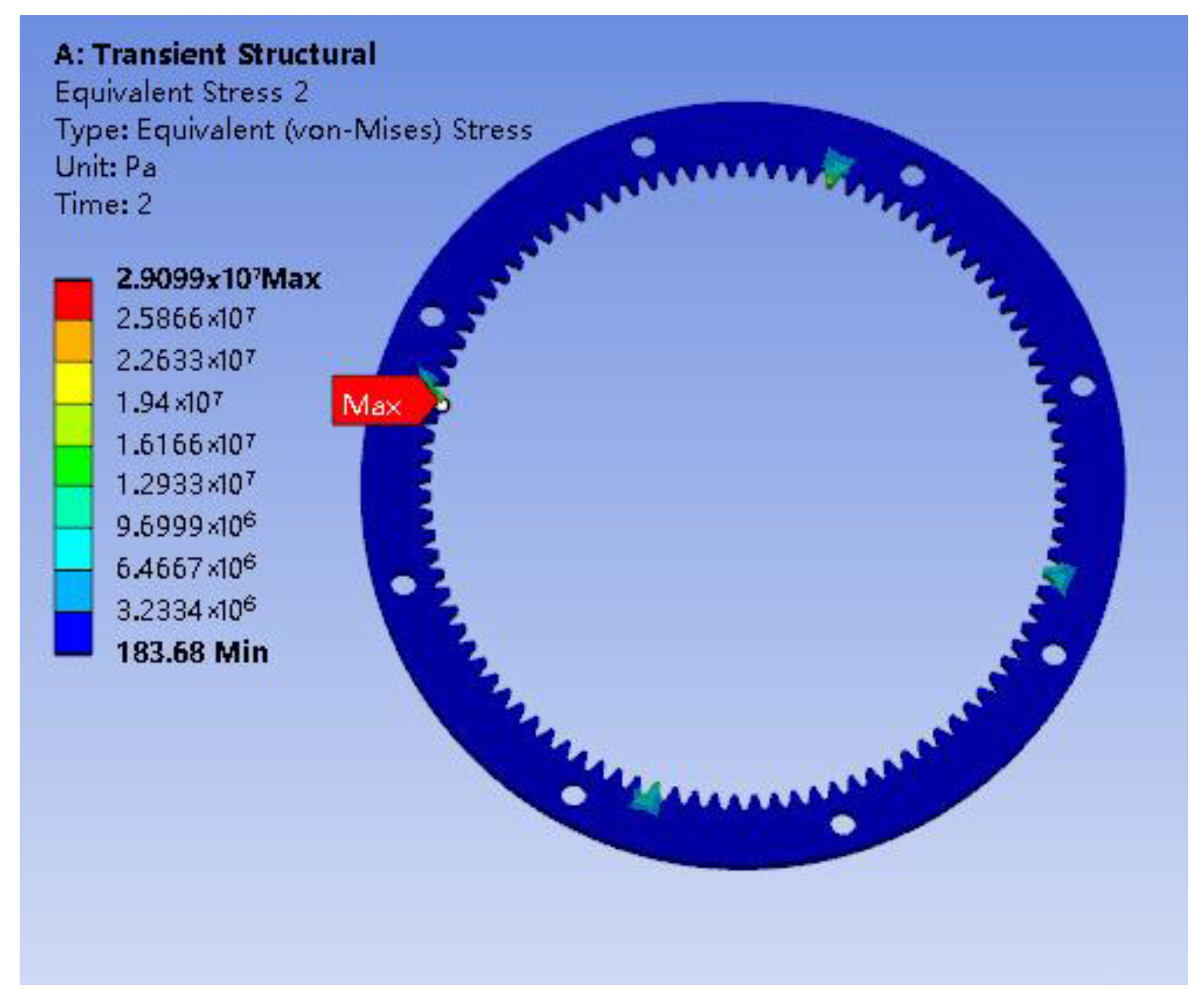
3.3. Digital Twin Model Correction Method
4. Case Study
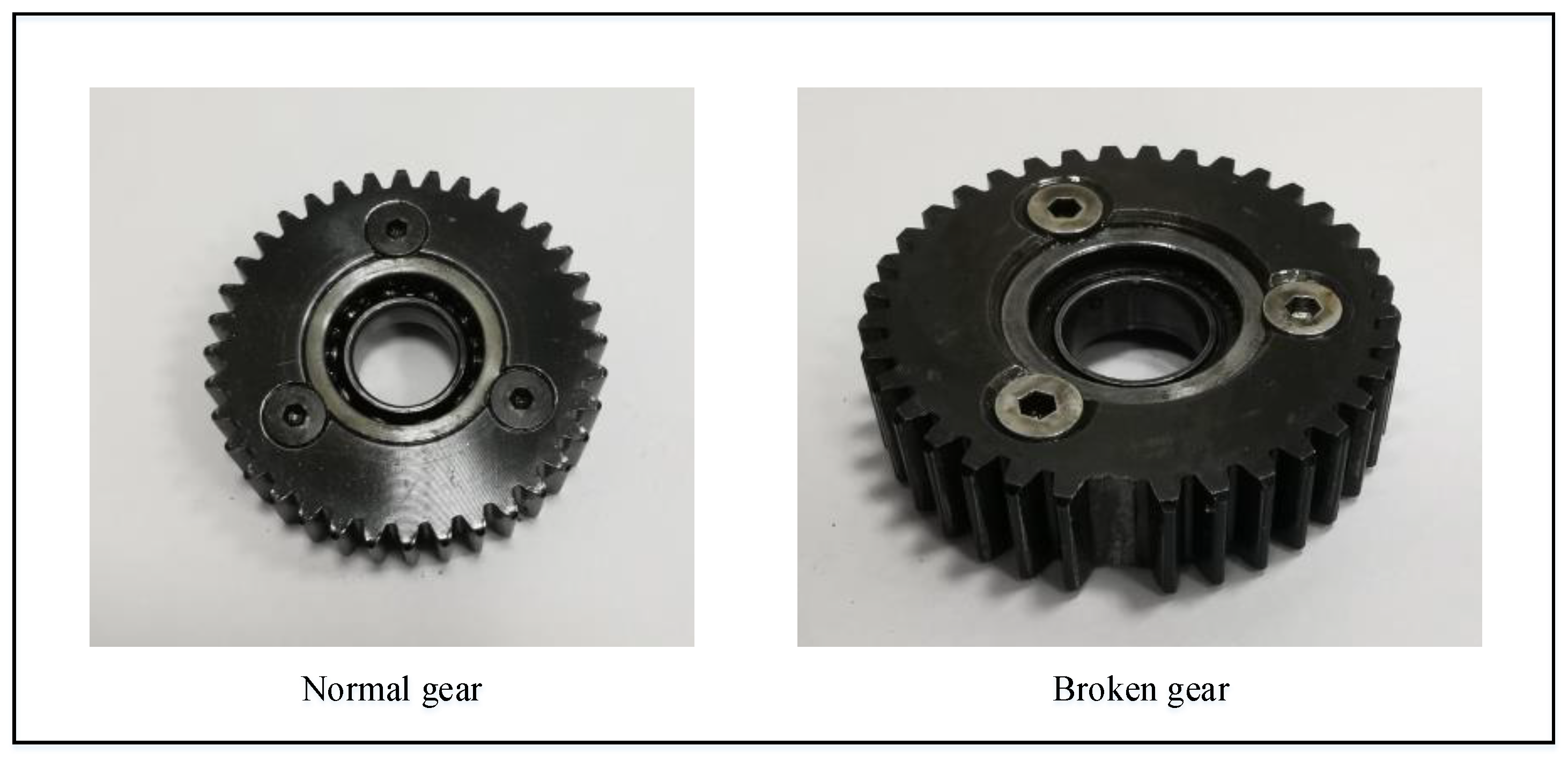
4.1. Experimental Process
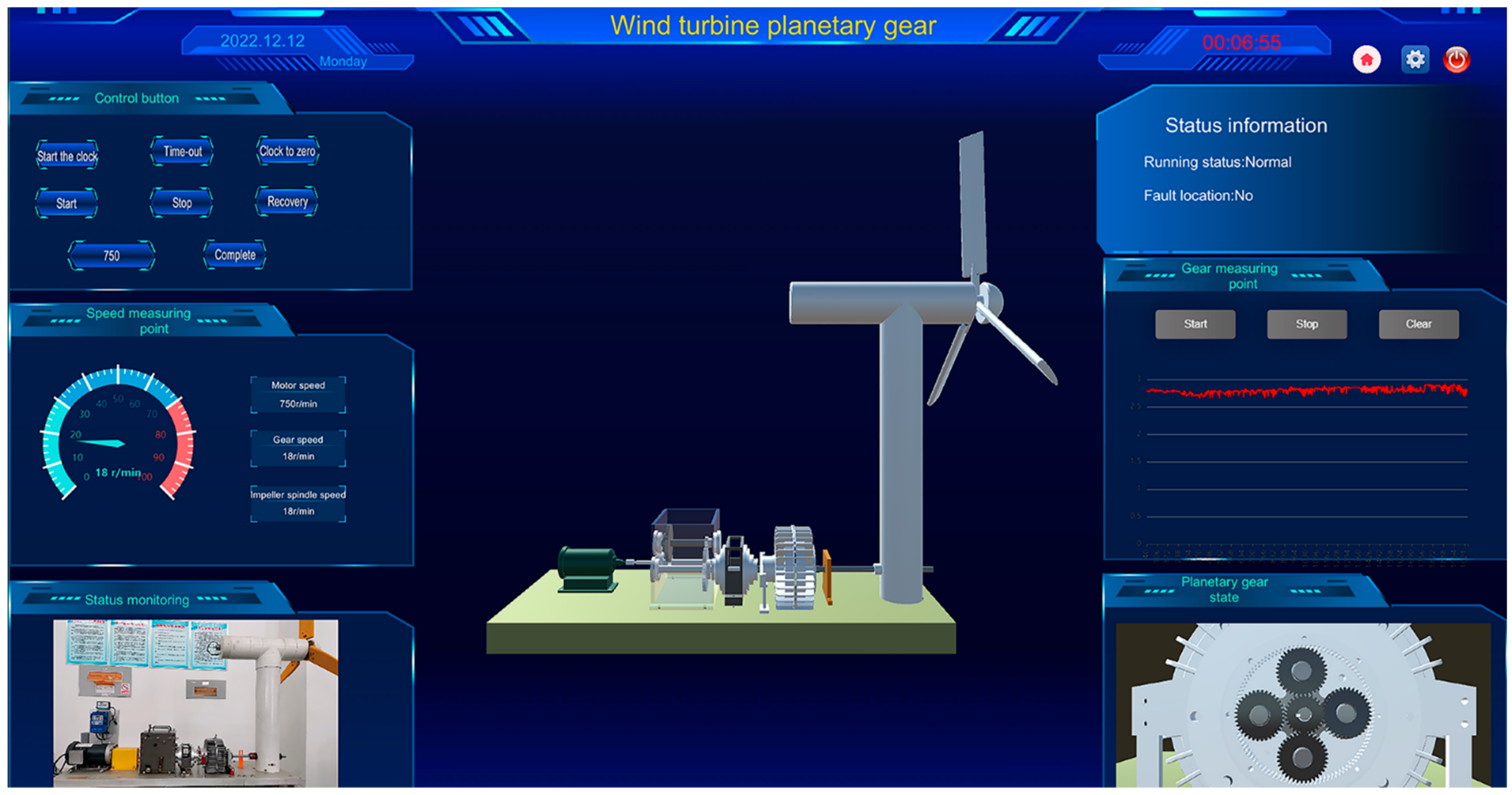
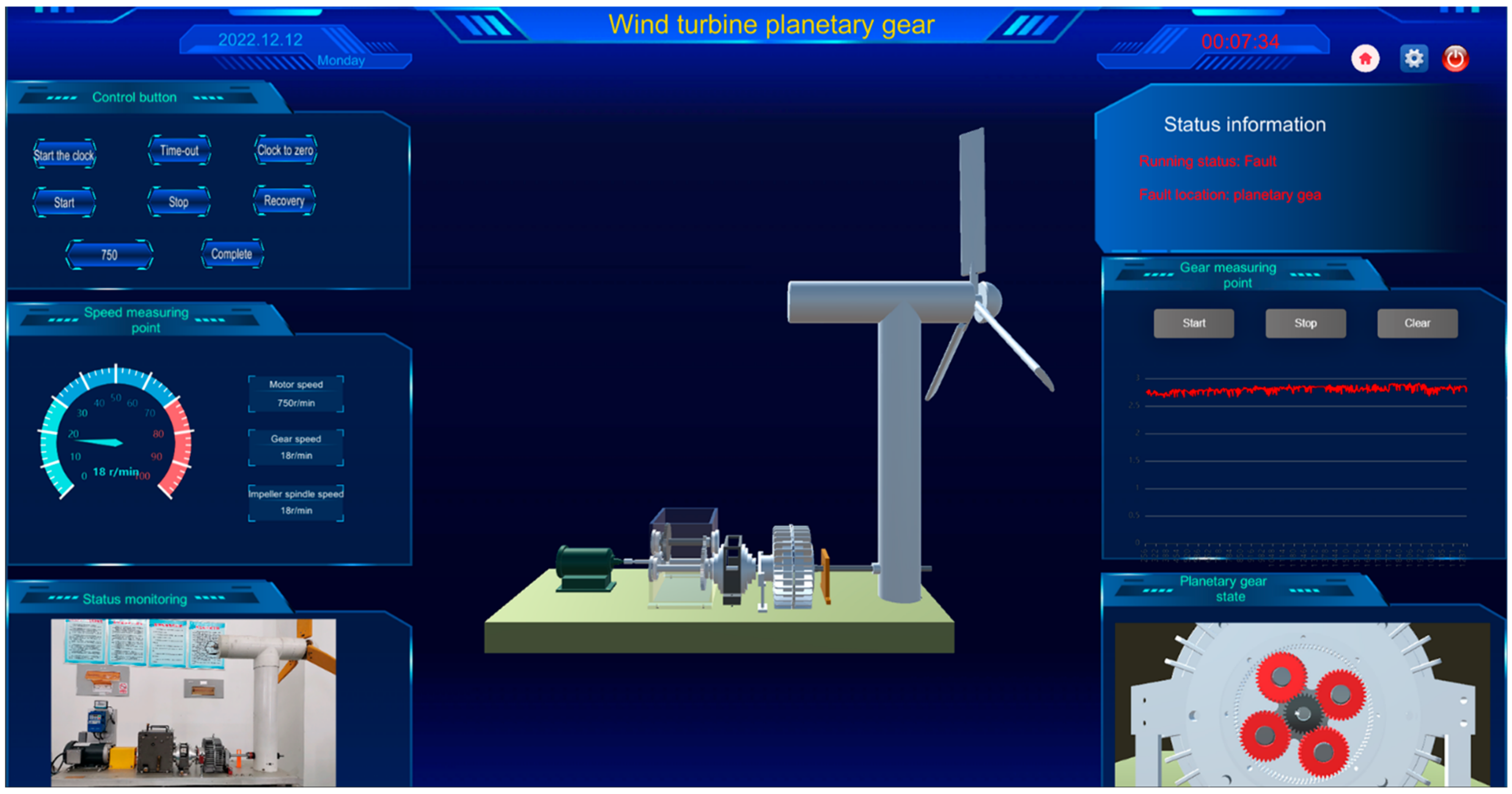
4.2. Digital Twin Visual Interface
5. Discussion
6. Conclusions
- (1)
- Digital twinning technology is applied to carry out the real-time visual monitoring of the operating state of the wind turbine planetary gear through the data acquisition of sensors, making it possible to monitor the internal operation process of the wind turbine digitally. The proposed digital twin fault diagnosis system provides a new concept and a complete solution for the visual monitoring, real-time fault diagnosis, and performance maintenance of the planetary gear of wind turbines.
- (2)
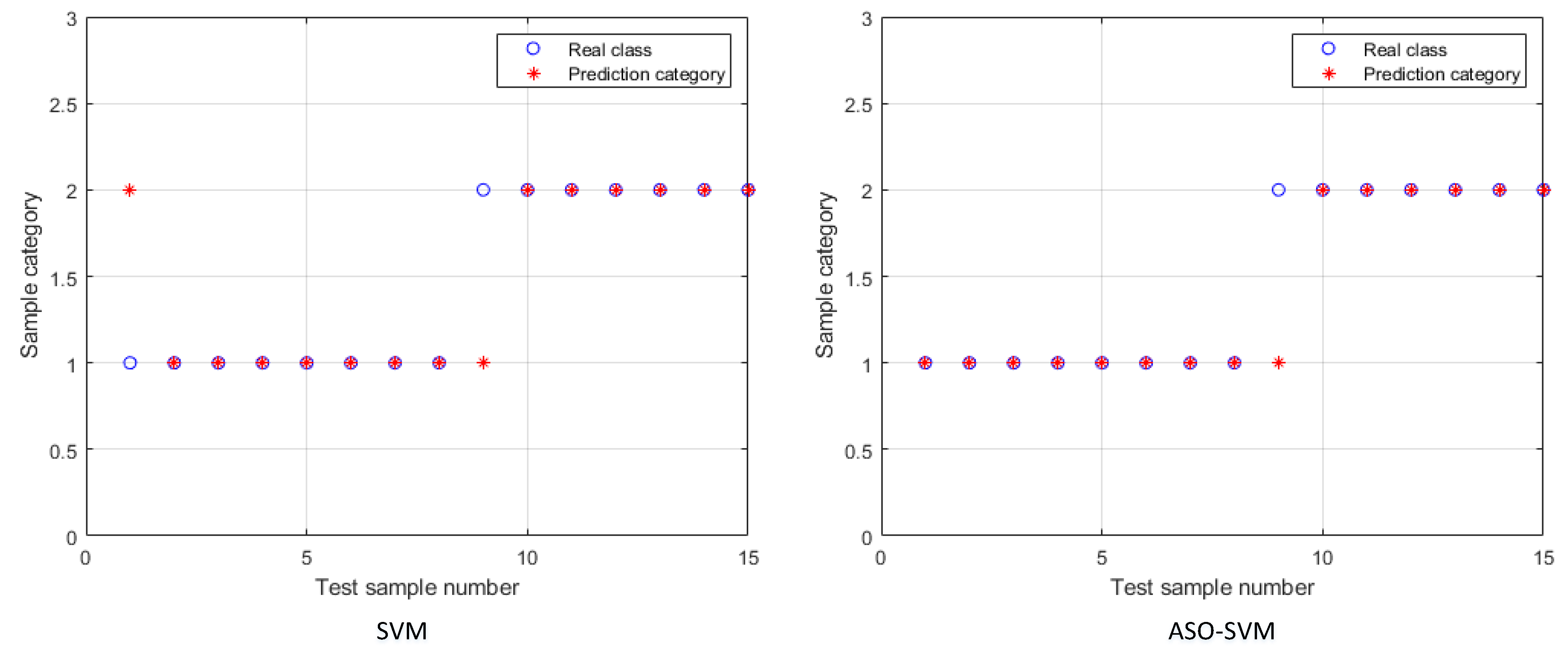
- A data-driven fault diagnosis method based on EMD-ASO-SVM is proposed to make timely and effective judgments on the health status of planetary gears by the real-time collection, diagnosis, and analysis of strain signals in the running state of planetary gears of wind turbines. The fault classification accuracy of the ASO-SVM model is 94%, while that of the traditional SVM model is only 86.67%, characterized by fewer required samples and higher diagnostic efficiency.
- (3)
- Compared with other digital twin systems, the system developed in this paper has the advantages of low delay and high efficiency, providing it with very high application universality.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lebranchu, A.; Charbonnier, S.; Bérenguer, C.; Prévost, F. A combined mono- and multi-turbine approach for fault indicator synthesis and wind turbine monitoring using SCADA data. ISA Trans. 2019, 87, 272–281. [Google Scholar] [CrossRef]
- Xu, Z.; Li, C.; Yang, Y. Fault diagnosis of rolling bearings using an improved multi-scale convolutional neural network with feature attention mechanism. ISA Trans. 2021, 110, 379–393. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.; Yang, Y.; Xu, M.; Huang, W. Intelligent fault diagnosis of planetary gearbox based on refined composite hierarchical fuzzy entropy and random forest. ISA Trans. 2021, 109, 340–351. [Google Scholar] [CrossRef] [PubMed]
- Xian, G.-M.; Zeng, B.-Q. Corrigendum: Corrigendum to “An intelligent fault diagnosis method based on wavelet packet analysis and hybrid support vector machines” [Expert Systems with Applications 36 (10)(2009) 12131–12136]. Expert Syst. Appl. Int. J. 2010, 37, 4721. [Google Scholar] [CrossRef]
- Salameh, J.P.; Cauet, S.; Etien, E.; Sakout, A.; Rambault, L. Gearbox condition monitoring in wind turbines: A review. Mech. Syst. Signal Process. 2018, 111, 251–264. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, P.X.; Gao, J. Model-based fault diagnosis methods for systems with stochastic process—A survey. Neurocomputing 2022, 513, 137–152. [Google Scholar] [CrossRef]
- Farid, M.; Solav, D. Data-driven sensor placement optimization for accurate and early prediction of stochastic complex systems. J. Sound Vib. 2023, 543, 117317. [Google Scholar] [CrossRef]
- Liu, L.; Liu, J.; Zhou, Q.; Huang, D. Machine learning algorithm selection for windage alteration fault diagnosis of mine ventilation system. Adv. Eng. Inform. 2022, 53, 101666. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z.; Wang, S.; Li, W.; Sarkodie-Gyan, T.; Feng, S. A hybrid deep-learning model for fault diagnosis of rolling bearings. Measurement 2021, 169, 108502. [Google Scholar] [CrossRef]
- Ye, M.; Yan, X.; Chen, N.; Jia, M. Intelligent fault diagnosis of rolling bearing using variational mode extraction and improved one-dimensional convolutional neural network. Appl. Acoust. 2023, 202, 109143. [Google Scholar] [CrossRef]
- Abdul, Z.K.; Al-Talabani, A.K.; Ramadan, D.O. A hybrid temporal feature for gear fault diagnosis using the long short term memory. IEEE Sens. J. 2020, 20, 14444–14452. [Google Scholar] [CrossRef]
- Yu, J.; Xu, Y.; Liu, K. Planetary gear fault diagnosis using stacked denoising autoencoder and gated recurrent unit neural network under noisy environment and time-varying rotational speed conditions. Meas. Sci. Technol. 2019, 30, 095003. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. In Transdisciplinary Perspectives on Complex Systems: New Findings and Approaches; Springer: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar]
- Jia, W.; Wang, W.; Zhang, Z. From simple digital twin to complex digital twin Part I: A novel modeling method for multi-scale and multi-scenario digital twin. Adv. Eng. Inform. 2022, 53, 101706. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M. Digital twin five-dimensional model and ten major applications. Comput. Integr. Manuf. Syst. 2019, 25, 5–22. [Google Scholar]
- Liu, Y.; Ren, H. Acquisition method of evaluation stress for the digital twin model of ship monitoring structure. Appl. Ocean Res. 2022, 129, 103368. [Google Scholar] [CrossRef]
- Li, J.; Wang, S.; Yang, J.; Zhang, H.; Zhao, H. A Digital Twin-Based State Monitoring Method of Gear Test Bench. Appl. Sci. 2023, 13, 3291. [Google Scholar] [CrossRef]
- Zong, X.; Luan, Y.; Wang, H.; Li, S. A multi-robot monitoring system based on digital twin. Procedia Comput. Sci. 2021, 183, 94–99. [Google Scholar] [CrossRef]
- Zhang, Y.; Ji, J.; Ren, Z.; Ni, Q.; Gu, F.; Feng, K.; Yu, K.; Ge, J.; Lei, Z.; Liu, Z. Digital twin-driven partial domain adaptation network for intelligent fault diagnosis of rolling bearing. Reliab. Eng. Syst. Saf. 2023, 234, 109186. [Google Scholar] [CrossRef]
- Xiong, J.; Ye, H.; Pei, W.; Kong, L.; Huo, Q.; Han, Y. A monitoring and diagnostics method based on FPGA-digital twin for power electronic transformer. Electr. Power Syst. Res. 2022, 210, 108111. [Google Scholar] [CrossRef]
- Guo, K.; Wan, X.; Liu, L.; Gao, Z.; Yang, M. Fault diagnosis of intelligent production line based on digital twin and improved random forest. Appl. Sci. 2021, 11, 7733. [Google Scholar] [CrossRef]
- Shangguan, D.; Chen, L.; Ding, J. A digital twin-based approach for the fault diagnosis and health monitoring of a complex satellite system. Symmetry 2020, 12, 1307. [Google Scholar] [CrossRef]
- Zhang, H.; Qi, Q.; Ji, W.; Tao, F. An update method for digital twin multi-dimension models. Robot. Comput.-Integr. Manuf. 2023, 80, 102481. [Google Scholar] [CrossRef]
- Zhang, Q.; Wei, Y.; Liu, Z.; Duan, J.; Qin, J. A Framework for Service-Oriented Digital Twin Systems for Discrete Workshops and Its Practical Case Study. Systems 2023, 11, 156. [Google Scholar] [CrossRef]
- Sharma, A.; Kosasih, E.; Zhang, J.; Brintrup, A.; Calinescu, A. Digital twins: State of the art theory and practice, challenges, and open research questions. J. Ind. Inf. Integr. 2022, 30, 100383. [Google Scholar] [CrossRef]
- El Bazi, N.; Mabrouki, M.; Laayati, O.; Ouhabi, N.; El Hadraoui, H.; Hammouch, F.-E.; Chebak, A. Generic Multi-Layered Digital-Twin-Framework-Enabled Asset Lifecycle Management for the Sustainable Mining Industry. Sustainability 2023, 15, 3470. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Zhou, C.; Xiong, Z.; Bai, H.; Xing, L.; Jia, Y.; Yuan, X. Parameter-Adaptive TVF-EMD Feature Extraction Method Based on Improved GOA. Sensors 2022, 22, 7195. [Google Scholar] [CrossRef] [PubMed]
- Yin, Z.; Hou, J. Recent advances on SVM based fault diagnosis and process monitoring in complicated industrial processes. Neurocomputing 2016, 174, 643–650. [Google Scholar] [CrossRef]
- Hua, L.; Zhang, C.; Peng, T.; Ji, C.; Nazir, M.S. Integrated framework of extreme learning machine (ELM) based on improved atom search optimization for short-term wind speed prediction. Energy Convers. Manag. 2022, 252, 115102. [Google Scholar] [CrossRef]
- Mohapatra, S.K.; Patnaik, S. ESA-ASO: An enhanced search ability based atom search optimization algorithm for epileptic seizure detection. Meas. Sens. 2022, 24, 100519. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Grid Size (mm) | Base Size (mm) | Resistance Value (Ω) |
|---|---|---|---|
| 350-3AA | 3.0 × 3.1 | 7.3 × 4.1 | 350 ± 0.1 |
| Items | Gear |
|---|---|
| Number of teeth | 36 |
| Module (mm) | 1 |
| Pressure Angle | 20 |
| Crest height (mm) | 1 |
| Top clearance (mm) | 0.25 |
| Root height (mm) | 1.25 |
| Tooth height (mm) | 2.25 |
| Diameter of the dividing circle (mm) | 36 |
| Base circle diameter (mm) | 33.83 |
| Apex diameter (mm) | 38 |
| Root circle diameter (mm) | 33.5 |
| Pitch of teeth (mm) | 3.14 |
| Tooth thickness (mm) | 1.57 |
| Slot width (mm) | 1.57 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Sun, W.; Liu, L.; Wang, B.; Bao, S.; Jiang, R. Fault Diagnosis of Wind Turbine Planetary Gear Based on a Digital Twin. Appl. Sci. 2023, 13, 4776. https://doi.org/10.3390/app13084776
Wang Y, Sun W, Liu L, Wang B, Bao S, Jiang R. Fault Diagnosis of Wind Turbine Planetary Gear Based on a Digital Twin. Applied Sciences. 2023; 13(8):4776. https://doi.org/10.3390/app13084776
Chicago/Turabian StyleWang, Yi, Wenlei Sun, Liqiang Liu, Bingkai Wang, Shenghui Bao, and Renben Jiang. 2023. "Fault Diagnosis of Wind Turbine Planetary Gear Based on a Digital Twin" Applied Sciences 13, no. 8: 4776. https://doi.org/10.3390/app13084776