
Dynamic Analysis of Underwater Torpedo during Straight-Line Navigation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Derivation of Munk Moment
3. Validation Cases
4. Numerical Model
4.1. The Establishment of Simulation Model
4.2. Results of Torpedo Direct Navigation under Munk Moment of 0
5. Results and Discussion
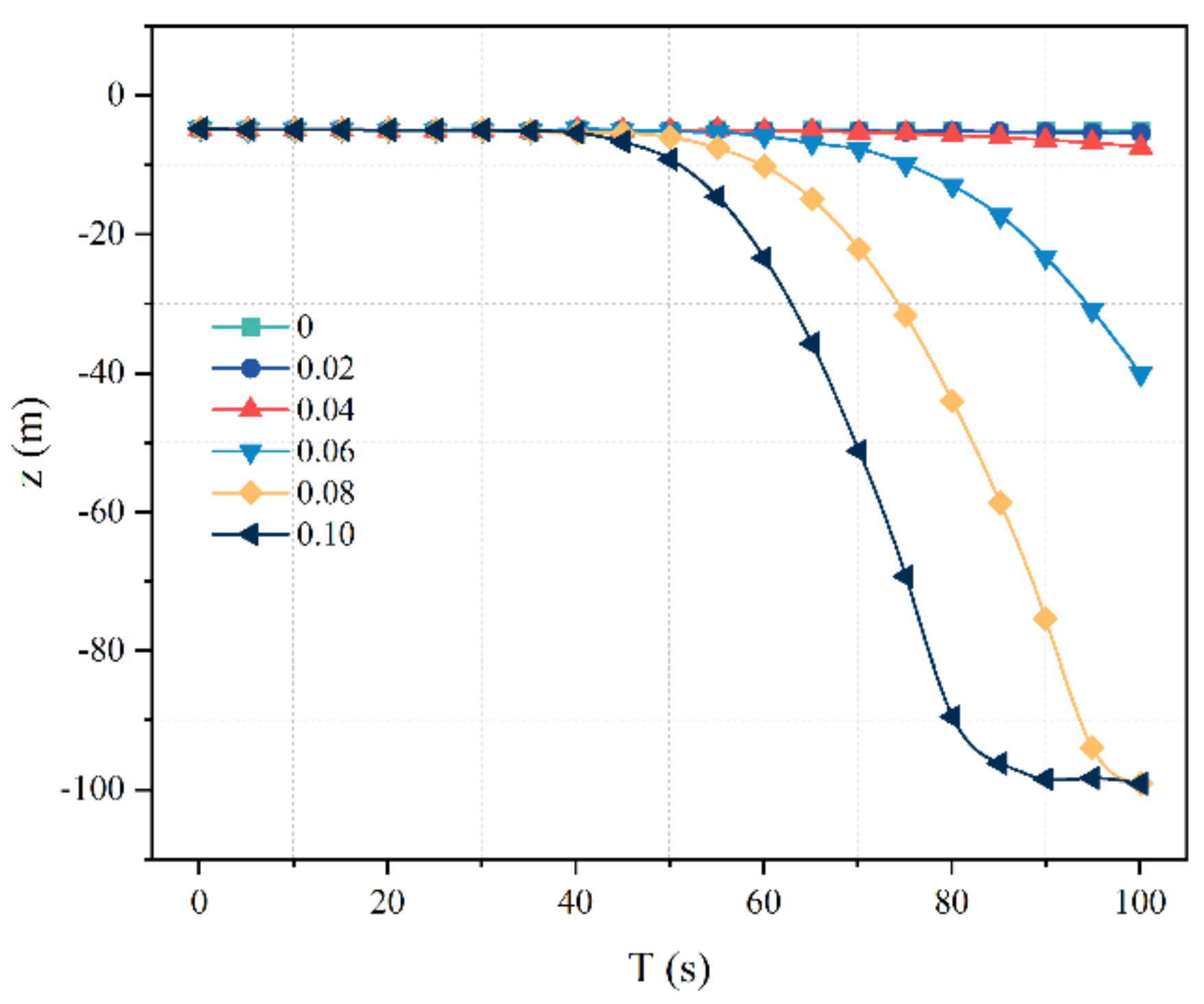
5.1. Navigation Depth and Pitch Angles under Different Munk Moment Coefficients
5.2. Lateral Displacement and Yaw Angles under Different Munk Moment Coefficients
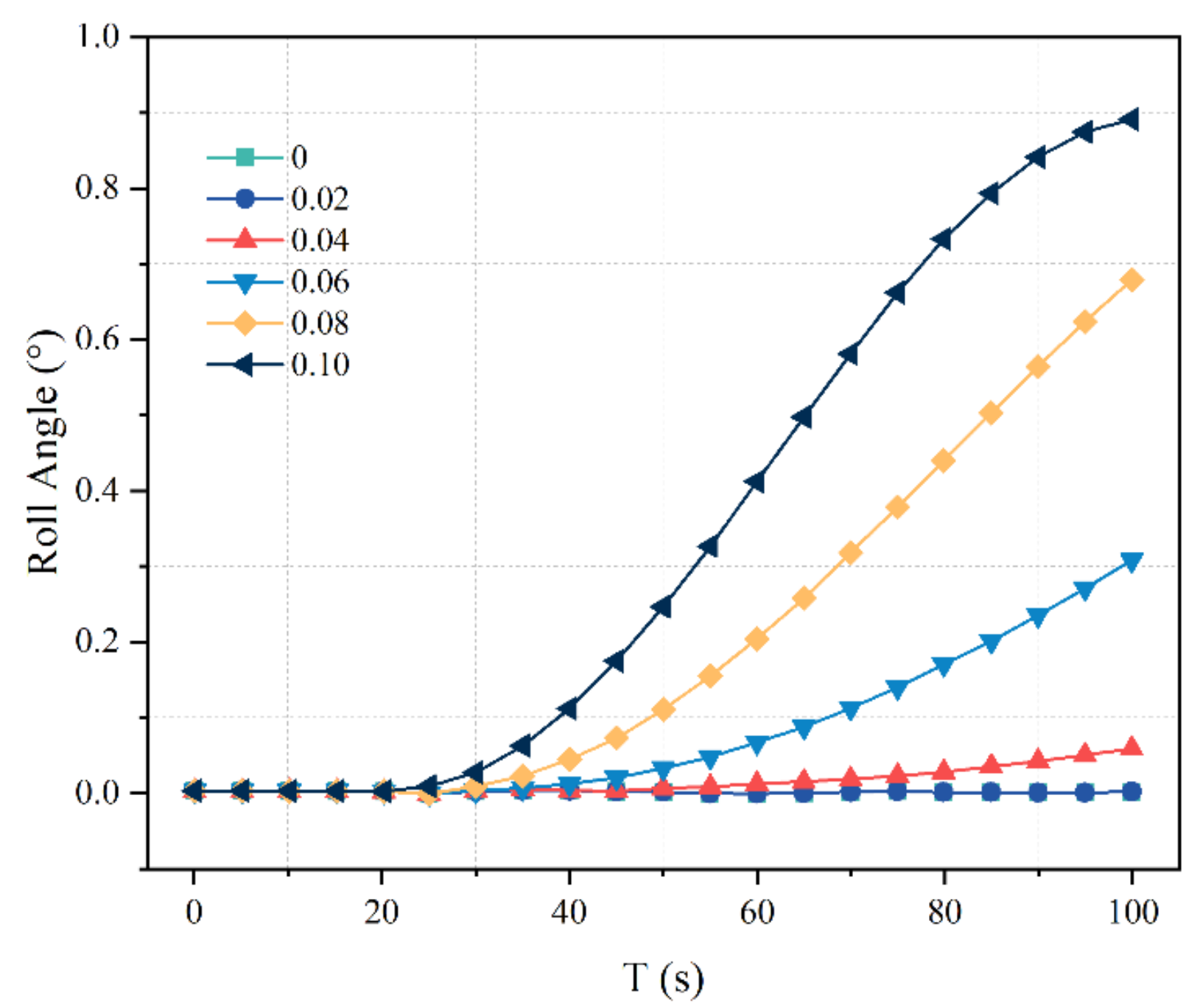
5.3. Roll Angles under Different Munk Moment Coefficients
6. Conclusions
- (1)
- Based on the above derivation of the Munk moment formulas in classical torpedo navigation mechanics and the comparison of Munk moment expression in the software, OrcaFlex, it can be seen that the Munk moment coefficient mentioned in this paper is the product of the additional mass matrix and the mass of the displacement of the torpedo. Thus, the Munk moment coefficient is related to the additional mass matrix of the torpedo.
- (2)
- Under the same Munk moment coefficient, the navigation depth shows an increasing trend in the time domain. At the same time, the navigation depth of the torpedo will increase with the increase of the Munk moment coefficient, and the deviation from the initial navigation depth will gradually increase. Under the same Munk moment coefficient, the pitch angle also increases in the time domain. This is because the pitch moment is affected by the Munk moment coefficient and increases with the increase of the Munk moment coefficient.
- (3)
- Under the same Munk moment coefficient, the lateral displacement increases in the time domain. At the same time point, with the increase of the Munk moment coefficient, the lateral displacement of the torpedo will increase numerically, and the distance from the initial motion direction will increase gradually. Under the same Munk moment coefficient, the yaw angle increases in the time domain. This is because the yaw moment is affected by the Munk moment coefficient and increases with the increase of the Munk moment coefficient.
- (4)
- Under the same Munk moment coefficient, the roll angle increases in the time domain. At the same time, the amplitude of the roll angle of the torpedo will increase with the increase of the Munk moment coefficient, and the amplitude of the rotation angle of the mine body around the x-axis gradually increases. This is because the rolling moment is affected by the Munk moment coefficient and increases with the increase of the Munk moment coefficient.
- (5)
- According to classical torpedo navigation mechanics, the Munk moment is composed of pitch, roll, and yaw moments. With the expression of the Munk moment in OrcaFlex, it can only be concluded that the combined moment increases with the increase of the Munk moment coefficient, yet, the increase or decrease of each partial moment cannot be determined. However, according to conclusions (2), (3), and (4), the three moments can all increase with the increase of the Munk moment coefficient.
- (6)
- In conclusion, the increase of the Munk moment coefficient will lead to an increase in deflection of the torpedo’s direct sailing motion at each degree of freedom, which has an adverse effect on the torpedo’s accurate strike. According to conclusion (1), the Munk moment coefficient is related to the additional mass matrix. Therefore, in the design of the torpedo, we should reduce the additional mass of the torpedo by changing the shape of the torpedo so as to reduce the Munk moment coefficient of the torpedo and reduce the pitch, yaw, and roll moments of the torpedo.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbol | Meaning |
| The torpedo mass | |
| The length of the torpedo | |
| The additional mass | |
| The acceleration of the torpedo along the x-, y-, z-directions in the torpedo body coordinate system | |
| Thrust | |
| Resistance factor with maximum cross section S as characteristic area | |
| Density of fluid | |
| v | Torpedo speed |
| The maximum cross-sectional area of the torpedo | |
| Negative buoyancy of torpedo, ΔG = G − B | |
| Centroid position coordinates | |
| Angular acceleration of torpedo along x-, y-, z-directions in torpedo body coordinate system | |
| Position derivative of torpedo lift factor with respect to the angle of attack α and position derivative with respect to horizontal rudder angle δe | |
| Position derivative of side force factor to sideslip angle β and position derivative to vertical rudder angle δr | |
| The dimensionless factor of the rotational derivative of diagonal velocity ωz of lift | |
| The dimensionless factor of rotation derivative of angular velocity ωy of side force; | |
| Dimensionless angular velocity | |
| Position derivative of the rolling moment factor and yaw moment factor of the torpedo to sideslip angle β | |
| Position derivative of pitching moment Factor of the torpedo to attack angle α | |
| Position derivative of torpedo rolling moment factor with respect to vertical rudder angle δr and differential rudder angle δd | |
| Position derivative of torpedo yaw moment factor to vertical rudder angle δr | |
| Position derivative of torpedo pitching moment factor to horizontal rudder angle δe | |
| Rotation derivative of rolling moment factor of ωx and ωy | |
| Rotational derivative of yaw moment factor of ωx and ωy | |
| Rotation derivative of pitch moment factor of ωz | |
| Unbalanced moment possibly generated by a single propeller and an unbalanced counter-rotating propeller | |
| Pitch angular velocity | |
| Yaw rate | |
| The velocity of the torpedo in the x-, y-, z-directions in the ground coordinate system |
References
- Panda, J.P.; Mitra, A.; Warrior, H.V. A review on the hydrodynamic characteristics of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Mar. Env. 2021, 235, 15–29. [Google Scholar] [CrossRef]
- Fletcher, B. UUV Master Plan: A Vision for Navy UUV Development. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No. 00CH37158), Providence, RI, USA, 11–14 September 2000; pp. 65–71. [Google Scholar]
- Liang, Q.; Luo, M.; Wang, Y.; Hao, X. Multi-attacks effectiveness evaluation of UUV based on wake guidance. Ocean Eng. 2022, 266, 112654. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Ahmed, F.; Xiang, X.; Jiang, C.; Xiang, G.; Yang, S. Survey on traditional and AI based estimation techniques for hydrodynamic coefficients of autonomous underwater vehicle. Ocean Eng. 2023, 268, 113300. [Google Scholar] [CrossRef]
- Evans, J.; Nahon, M. Dynamics modeling and performance evaluation of an autonomous underwater vehicle. Ocean Eng. 2004, 31, 1835–1858. [Google Scholar] [CrossRef] [Green Version]
- Sabet, M.T.; Sarhadi, P.; Zarini, M. Extended and Unscented Kalman filters for parameter estimation of an autonomous underwater vehicle. Ocean Eng. 2014, 91, 329–339. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2013, 39, 131–149. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, F.; Schaefer, D. Dynamic modeling of an autonomous underwater vehicle. J. Mar. Sci. Tech.—Jpn. 2015, 20, 199–212. [Google Scholar] [CrossRef]
- Szymak, P. Mathematical Model of Underwater Vehicle with Undulating Propulsion. In Proceedings of the Third International Conference on Mathematics and Computers in Sciences and in Industry (MCSI), Chania, Greece, 27–29 August 2016; pp. 269–274. [Google Scholar]
- Xu, F.; Zou, Z.; Yin, J.; Cao, J. Identification modeling of underwater vehicles’ nonlinear dynamics based on support vector machines. Ocean Eng. 2013, 67, 68–76. [Google Scholar] [CrossRef]
- Hong, S.M.; Ha, K.N.; Kim, J. Dynamics modeling and motion simulation of usv/uuv with linked underwater cable. J. Mar. Sci. Eng. 2020, 8, 318. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, H.; Zhou, Q. Numerical prediction of submarine hydrodynamic coefficients using CFD simulation. J. Hydrodyn. 2012, 24, 840–847. [Google Scholar] [CrossRef]
- Singh, Y.; Bhattacharyya, S.K.; Idichandy, V.G. CFD approach to modelling, hydrodynamic analysis and motion characteristics of a laboratory underwater glider with experimental results. J. Ocean Eng. Sci. 2017, 2, 90–119. [Google Scholar] [CrossRef]
- Polis, C.D. Numerical Calculation of Manoeuvring Coefficients for Modelling the Effect of Submarine Motion Near the Surface. Ph.D. Thesis, University of Tasmania, Tasmania, Australia, 2018. [Google Scholar]
- Liu, X.; Hu, Y.; Mao, Z.; Tian, W. Numerical Simulation of the Hydrodynamic Performance and Self-Propulsion of a UUV near the Seabed. Appl. Sci. 2022, 12, 6975. [Google Scholar] [CrossRef]
- Lee, S.; Lee, S.; Bae, J. Maneuvering Hydrodynamic Forces Acting on Manta-type UUV Using CFD. J. Ocean Eng. Tech. 2020, 34, 237–244. [Google Scholar] [CrossRef]
- Rehman, F.U.; Huang, L.; Anderlini, E.; Thomas, G. Hydrodynamic modelling for a transportation system of two unmanned underwater vehicles: Semi-empirical, numerical and experimental analyses. J. Mar. Sci. Eng. 2021, 9, 500. [Google Scholar] [CrossRef]
- Tyagi, A.; Sen, D. Calculation of transverse hydrodynamic coefficients using computational fluid dynamic approach. Ocean Eng. 2006, 33, 798–809. [Google Scholar] [CrossRef]
- Le, T.; Hong, D. Computational fluid dynamics study of the hydrodynamic characteristics of a torpedo-shaped underwater glider. Fluids 2021, 6, 252. [Google Scholar] [CrossRef]
- Ling, X.; Leong, Z.Q.; Chin, C.; Woodward, M.; Duffy, J. Regression analysis and curve fitting for the hydrodynamic coefficients of an underwater vehicle undergoing straight-ahead motion. Ocean Eng. 2022, 262, 112135. [Google Scholar] [CrossRef]
- Zhang, J.; Chang, Z.; Lu, G.; Zheng, Z.; Zhang, Z. Analysis of the Dynamic System of Wave Glider with a Torpedo. J. Ocean Univ. China 2020, 19, 519–524. [Google Scholar] [CrossRef]
- Kilavuz, A.; Ozgoren, M.; Kavurmacioglu, L.A.; Durhasan, T.; Sarigiguzel, F.; Sahin, B.; Akilli, H.; Sekeroglu, E.; Yaniktepe, B. Flow characteristics comparison of PIV and numerical prediction results for an unmanned underwater vehicle positioned close to the free surface. Appl. Ocean Res. 2022, 129, 103399. [Google Scholar] [CrossRef]
- Anderson, J.M.; Chhabra, N.K. Maneuvering and stability performance of a robotic tuna. Integr. Comp. Biol. 2002, 42, 118–126. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hakamifard, M.; Rostami VF, M. Numerical and Analytical Calculation of Munk Moment in Real Flow for an Autonomous Submarine in Pure Sway Motion in PMM Test. J. Solid Fluid Mech. 2019, 9, 205–216. [Google Scholar]
- Hasanloo, D.; Pang, H.; Yu, G. On the estimation of the falling velocity and drag coefficient of torpedo anchor during acceleration. Ocean Eng. 2012, 42, 135–146. [Google Scholar] [CrossRef]
- Zhan, J.; Lu, X.; Zhang, X.; Li, G. Numerical calculation and analysis of trimaran’s additional mass. J. Huazhong Univ. Sci. Tech. (Nat. Sci. Edit.) 2013, 41, 109–113. (In Chinese) [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, B.; Sun, J.; Zhang, D.; Zhu, K.; Jiang, H. Dynamic Analysis of Underwater Torpedo during Straight-Line Navigation. Appl. Sci. 2023, 13, 4169. https://doi.org/10.3390/app13074169
Zhao B, Sun J, Zhang D, Zhu K, Jiang H. Dynamic Analysis of Underwater Torpedo during Straight-Line Navigation. Applied Sciences. 2023; 13(7):4169. https://doi.org/10.3390/app13074169
Chicago/Turabian StyleZhao, Bowen, Jiyuan Sun, Dapeng Zhang, Keqiang Zhu, and Haoyu Jiang. 2023. "Dynamic Analysis of Underwater Torpedo during Straight-Line Navigation" Applied Sciences 13, no. 7: 4169. https://doi.org/10.3390/app13074169