
Wi-NN: Human Gesture Recognition System Based on Weighted KNN

Abstract
:1. Introduction
- (1)
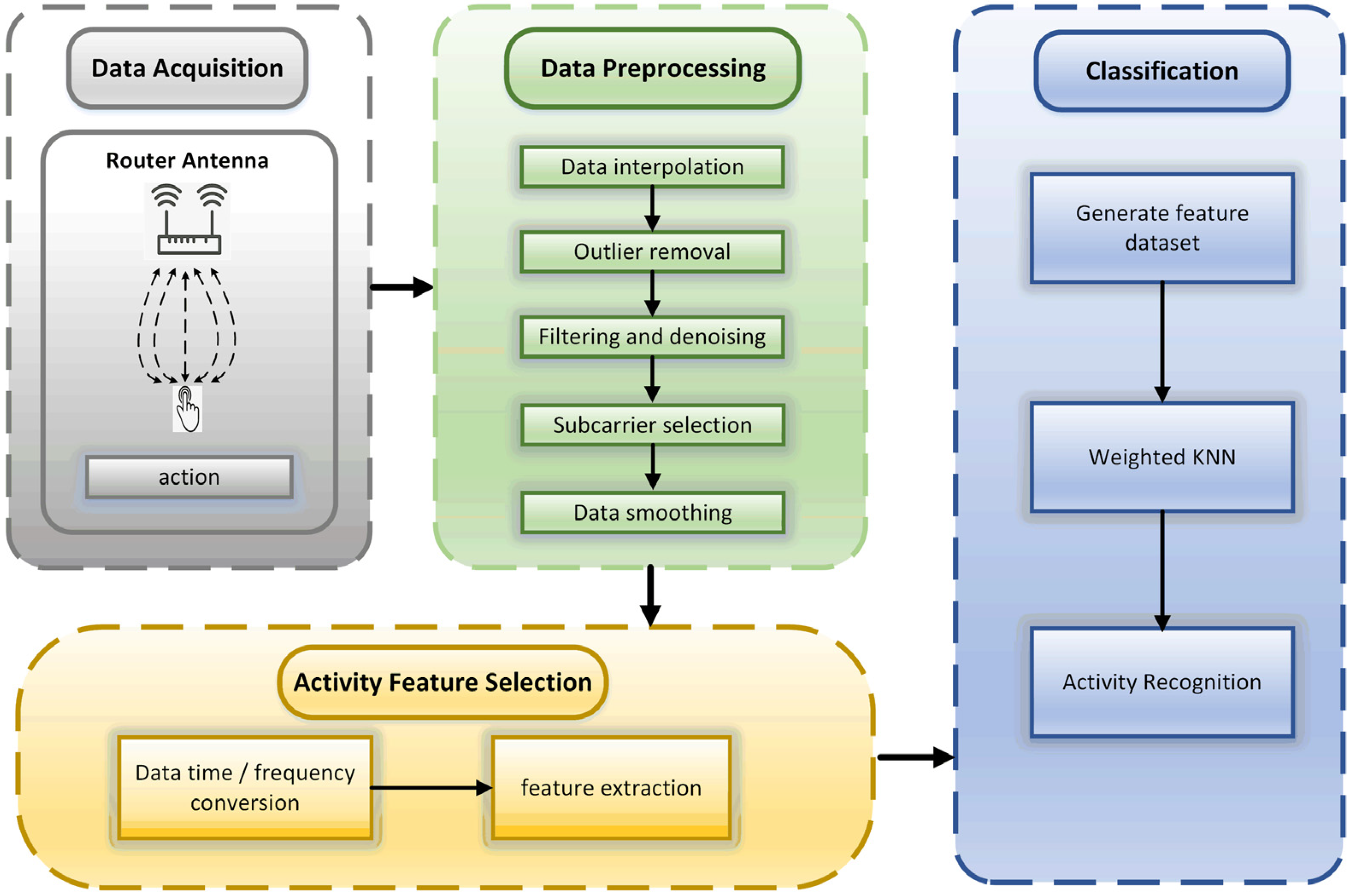
- Original information extracted from complex environment, while omitted user’s gesture direction and velocity vector, Hampel, discrete wavelet pre-processing, and principal component analysis (PCA) were employed to select the optimal subcarrier for feature extraction and selection.
- (2)
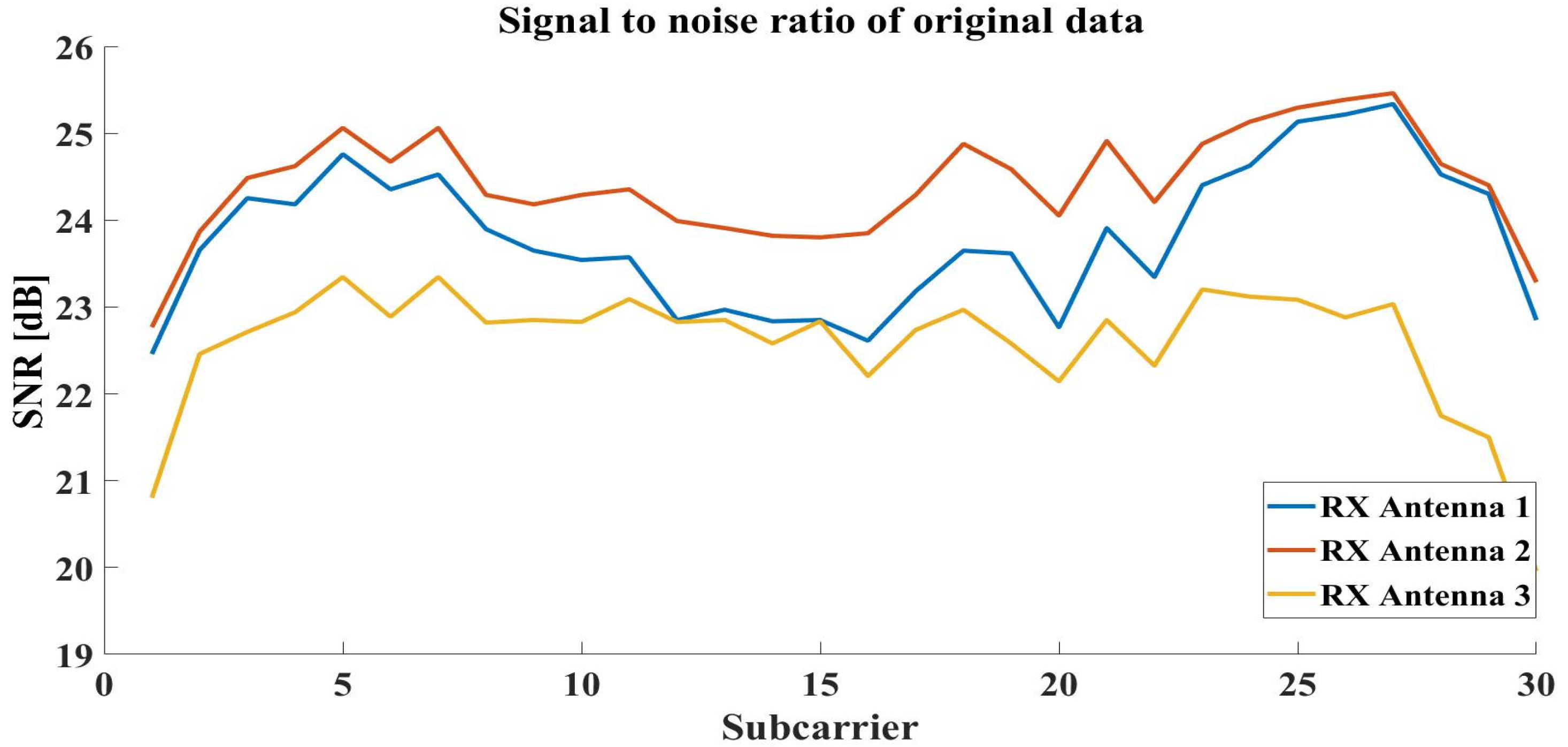
- For the selection of antenna, this paper is the first to use signal-to-noise ratio (S/N), variance size, as well as amplitude maximum and minimum differences, as the indicators.
- (3)
- For gestures recognition and classification, this study adopted the feature selection based on time domain by selecting the appropriate feature values and, finally, integrating the feature dataset into the weighted KNN classifier for classification and recognition.
2. Related Work
2.1. Gesture Recognition Technology
2.2. Studies on the Technology of Sensing Based on Wi-Fi
3. System Principle
Principle of Human Behavior Recognition Based on Channel State Information
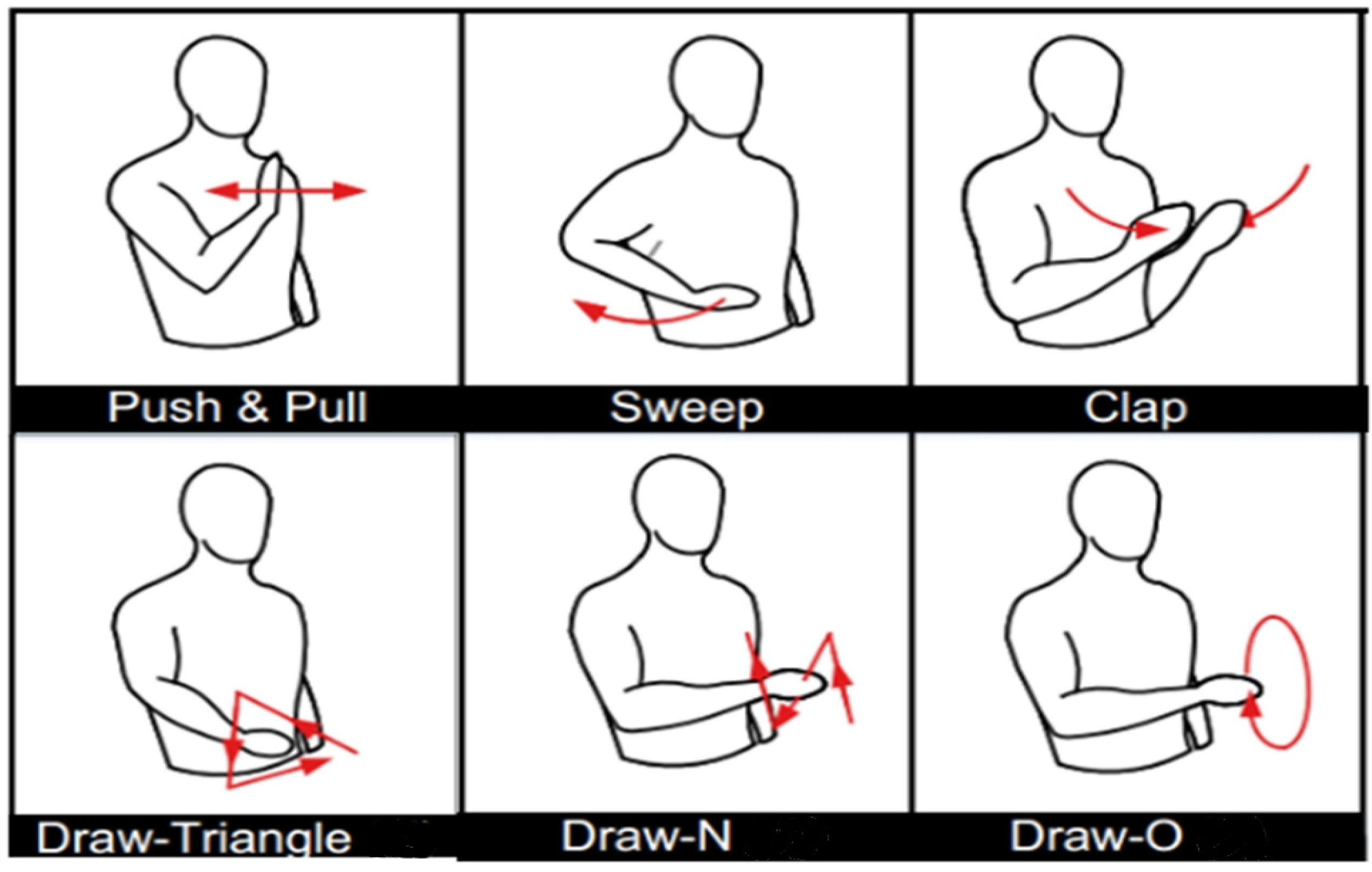
4. Experimental Design
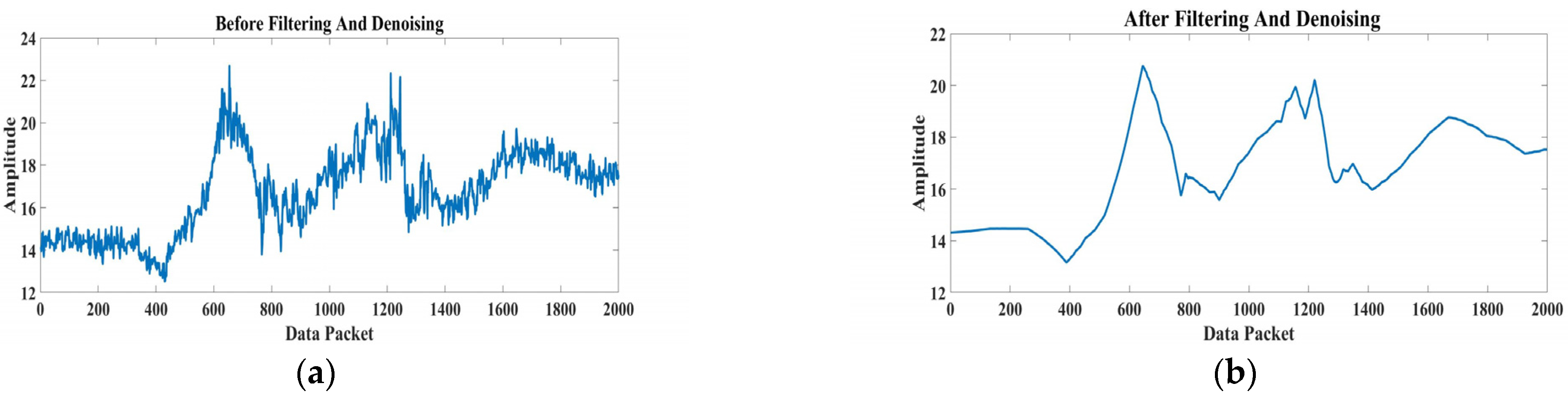
Data Pre-Processing
- Wavelet decomposition;
- The two most commonly used wavelet bases are Daubechies () and Symlets () wavelet systems. Although the wavelet system has an excellent effect of signal smoothness after denoising, its division in the frequency domain leads to a weaker support in the time domain, thus increasing computation time and worsening real-time performance. Meanwhile, the Wavelets system has better regularity and is comparable to the wavelet system in terms of continuity and filter length. Its better symmetry can reduce the phase distortion caused by the decomposition and reconstruction of the signal to a certain extent. Hence, the wavelet was selected in this study to carry out the wavelet decomposition of the signal in three layers. The wavelet function is presented below:
- 3.
- Threshold processing;
- 4.
- The four thresholds are unbiased likelihood estimation, fixed threshold, heuristic threshold, and extreme value threshold. Heuristic threshold is a combination of unbiased and fixed thresholds based on the algorithm of unbiased likelihood estimation. Let be the sum of squares of wavelet coefficients and n be the number of wavelet coefficients. When
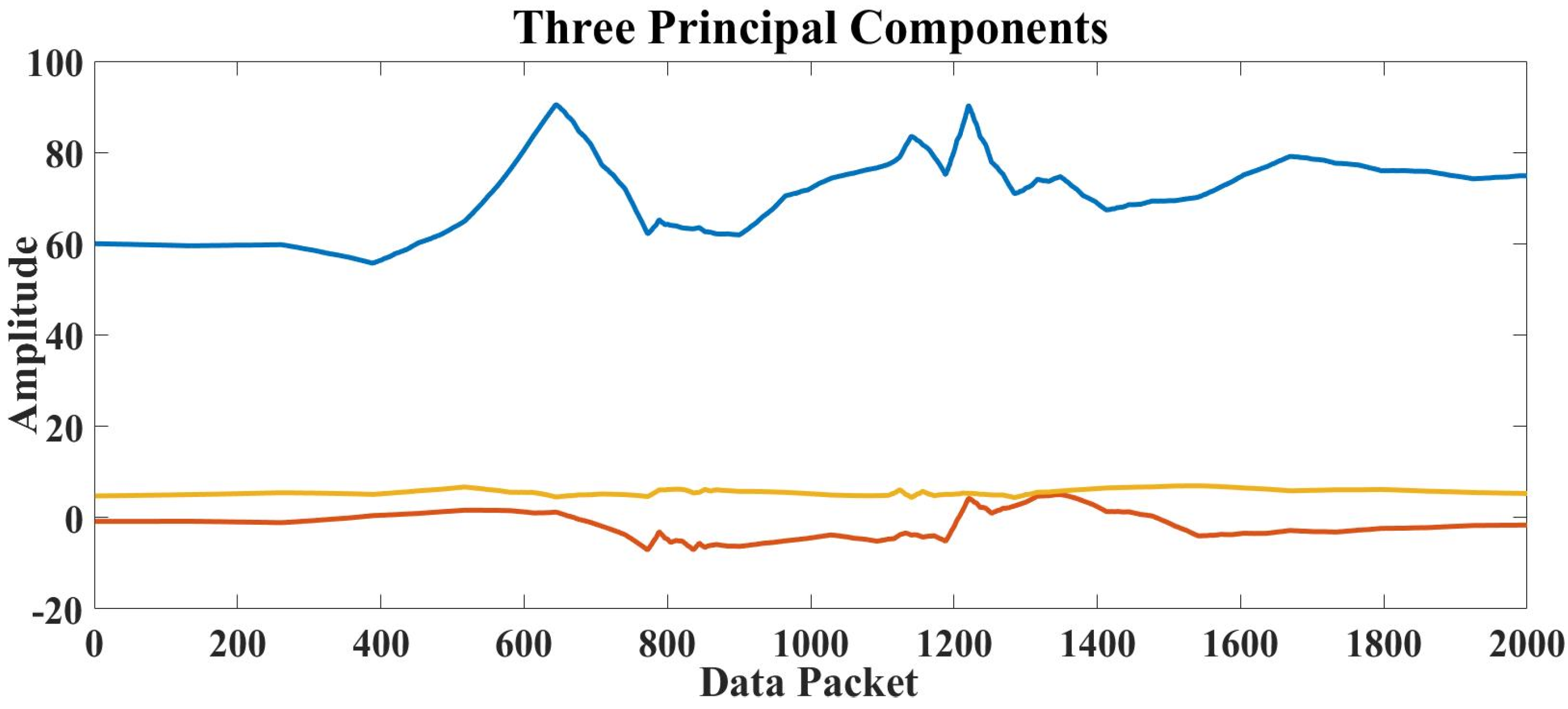
- Find the covariance matrix C of the data.
- Find the matrix eigenvalues and the corresponding eigenvectors from the covariance matrix.
- Normalize eigenvectors and eigenvalues.
- Reduce the dimensionality of the data.
5. Experimental Design
5.1. Feature Extraction
5.2. Feature Selection
5.3. Identification and Classification
5.3.1. KNN Algorithm Basic Principle
- Obtain K sample data from the training set at the closest distance from the band prediction sample.
- If the input category is continuous, then the test sample output is the average. The opposite output is the category with the highest number of nearest neighbors. The distance between two examples is usually tested using Euclidean distance. Shorter distance denotes higher similarity.
- The difficulty in predicting the target attribute value of the current sample to be predicted based on the obtained K samples is that it is difficult to find a suitable K value.
5.3.2. Weighted KNN
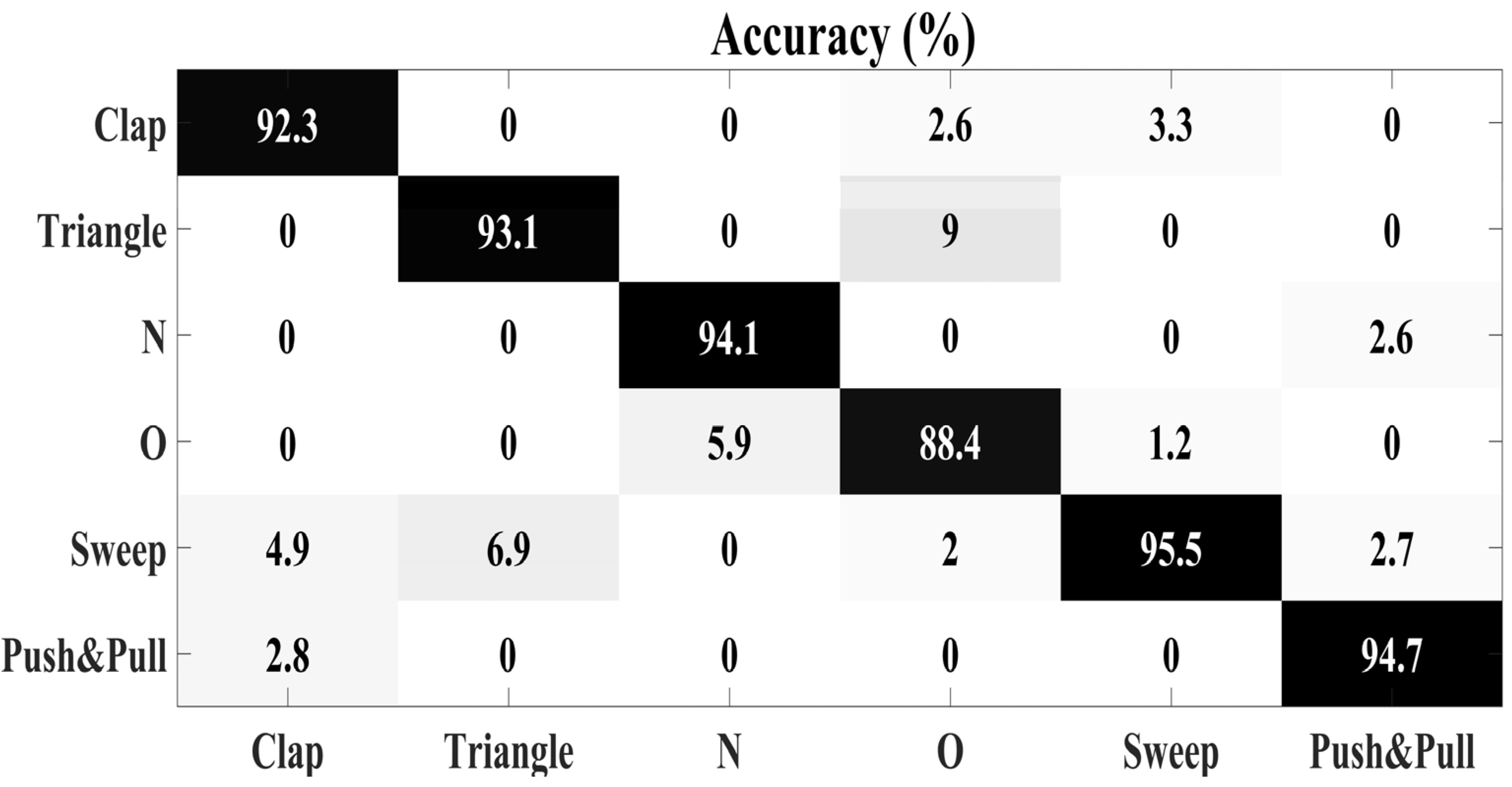
6. Experimental Results
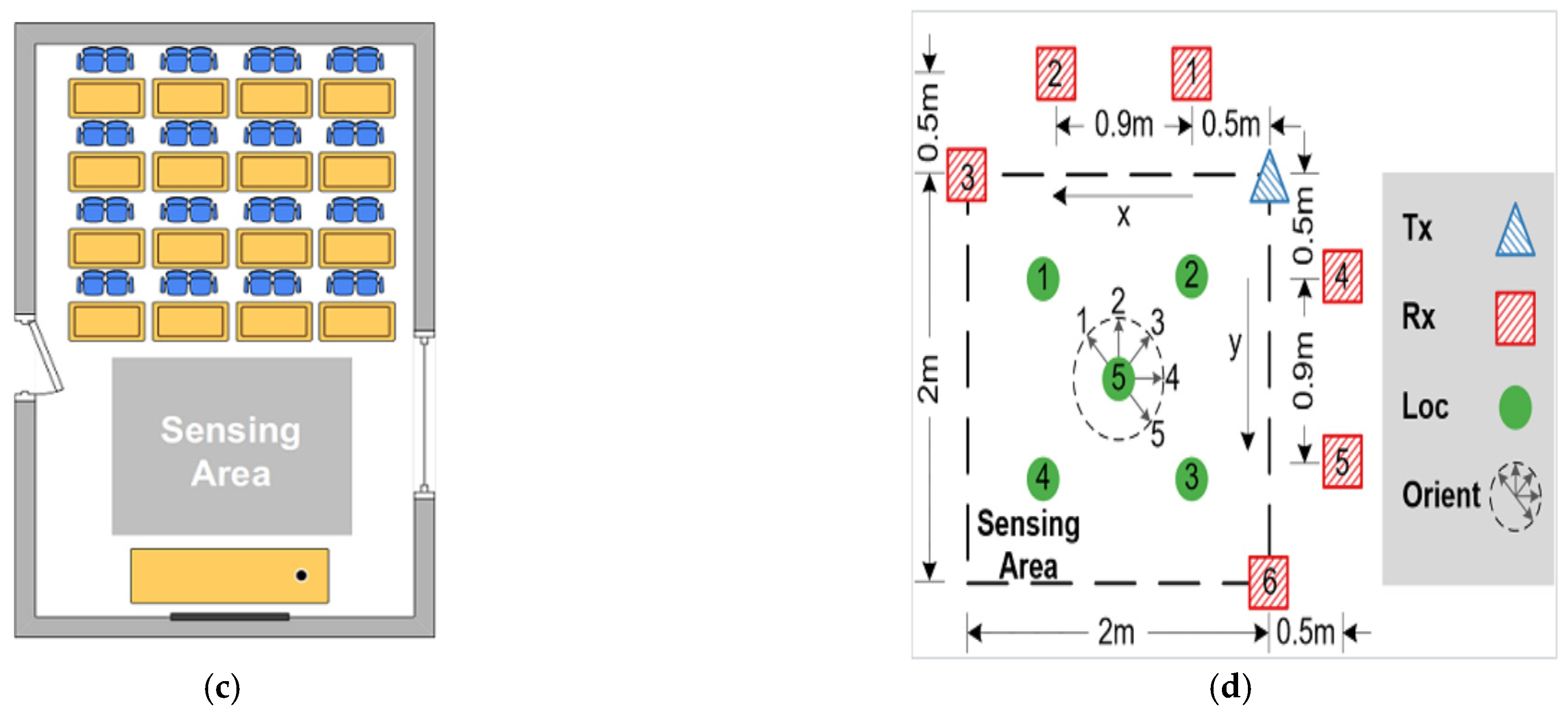
6.1. Experimental Environment
6.2. Experimental Equipment
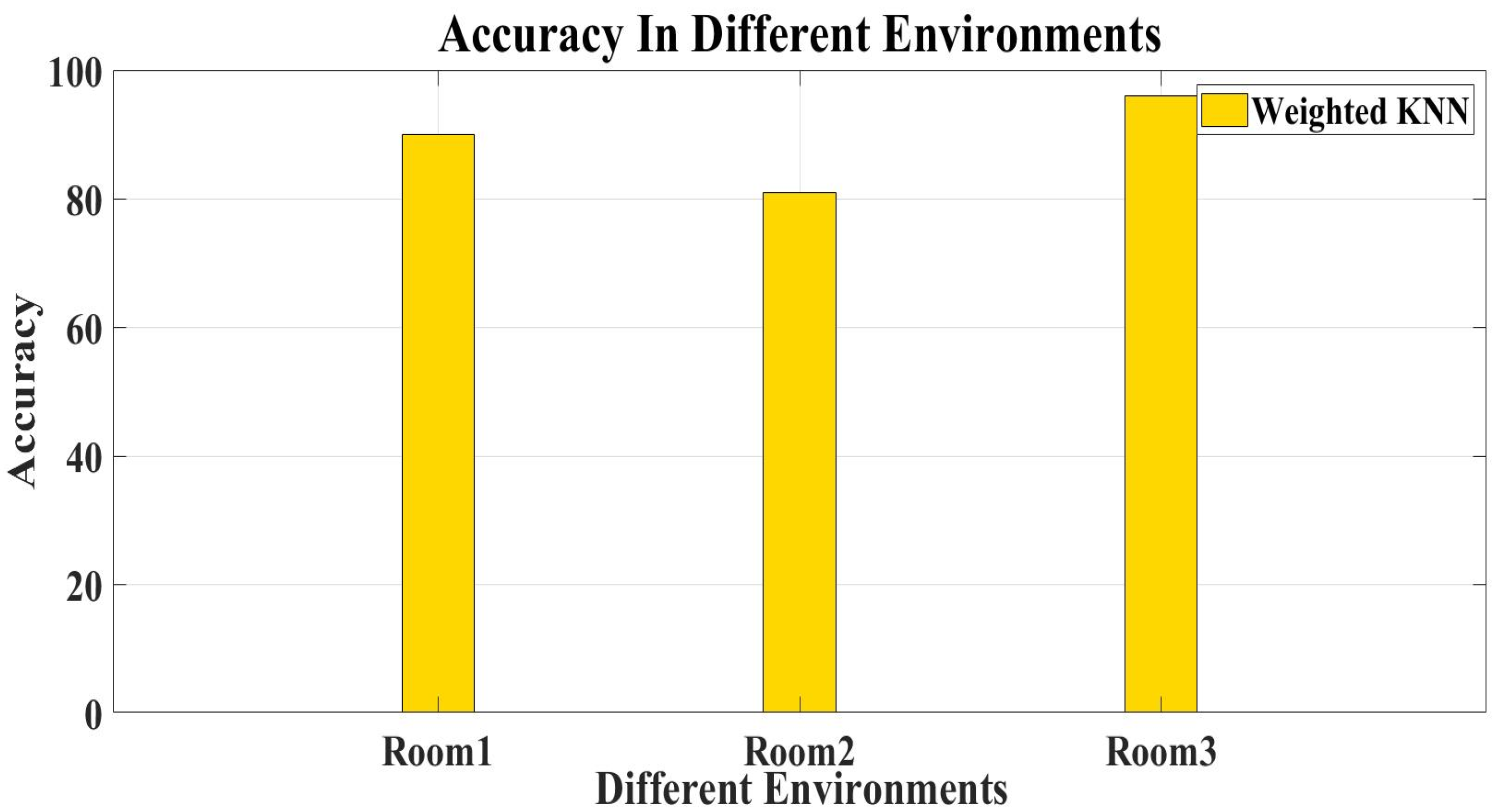
6.3. Experimental Results in Different Environments
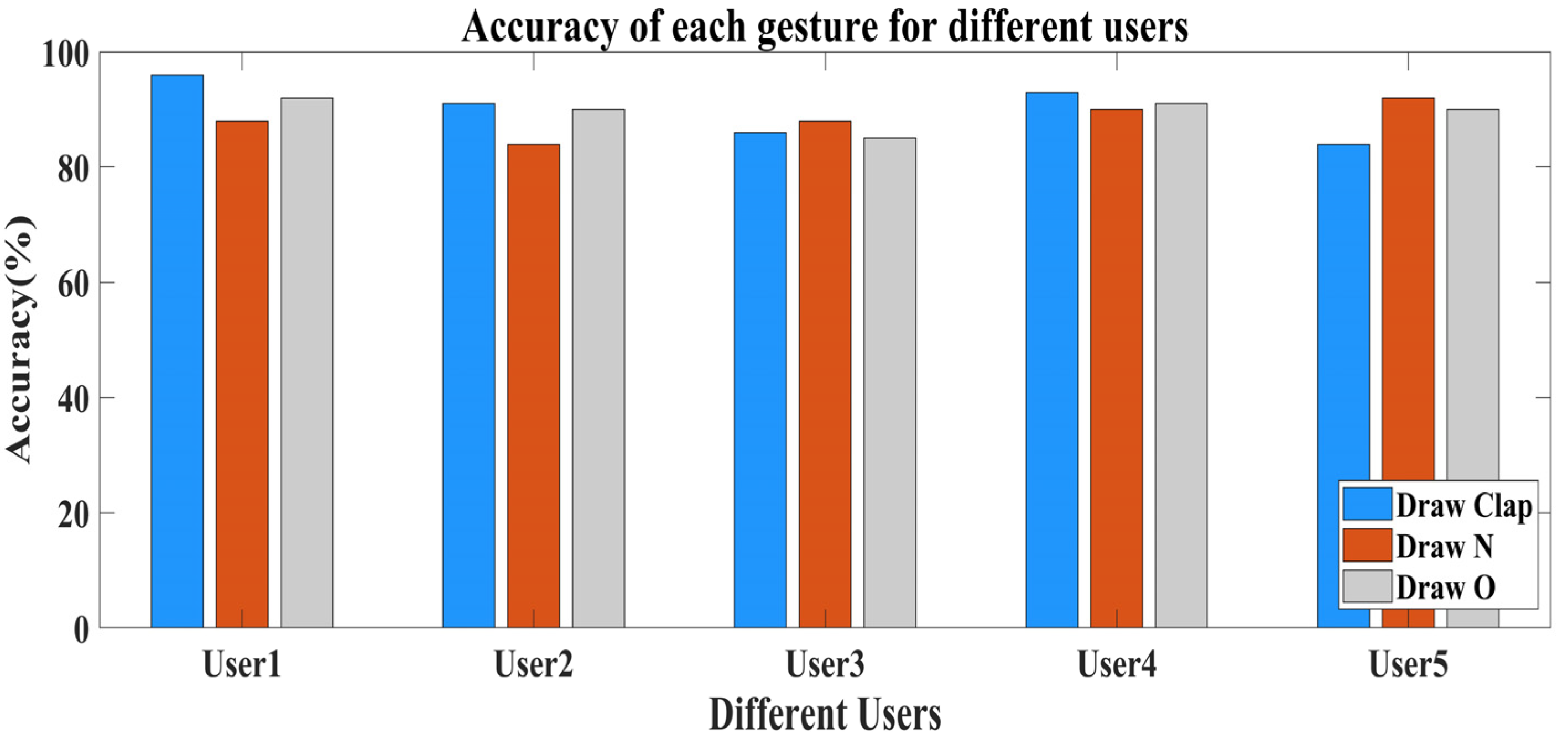
6.4. Experimental Results of Different Users
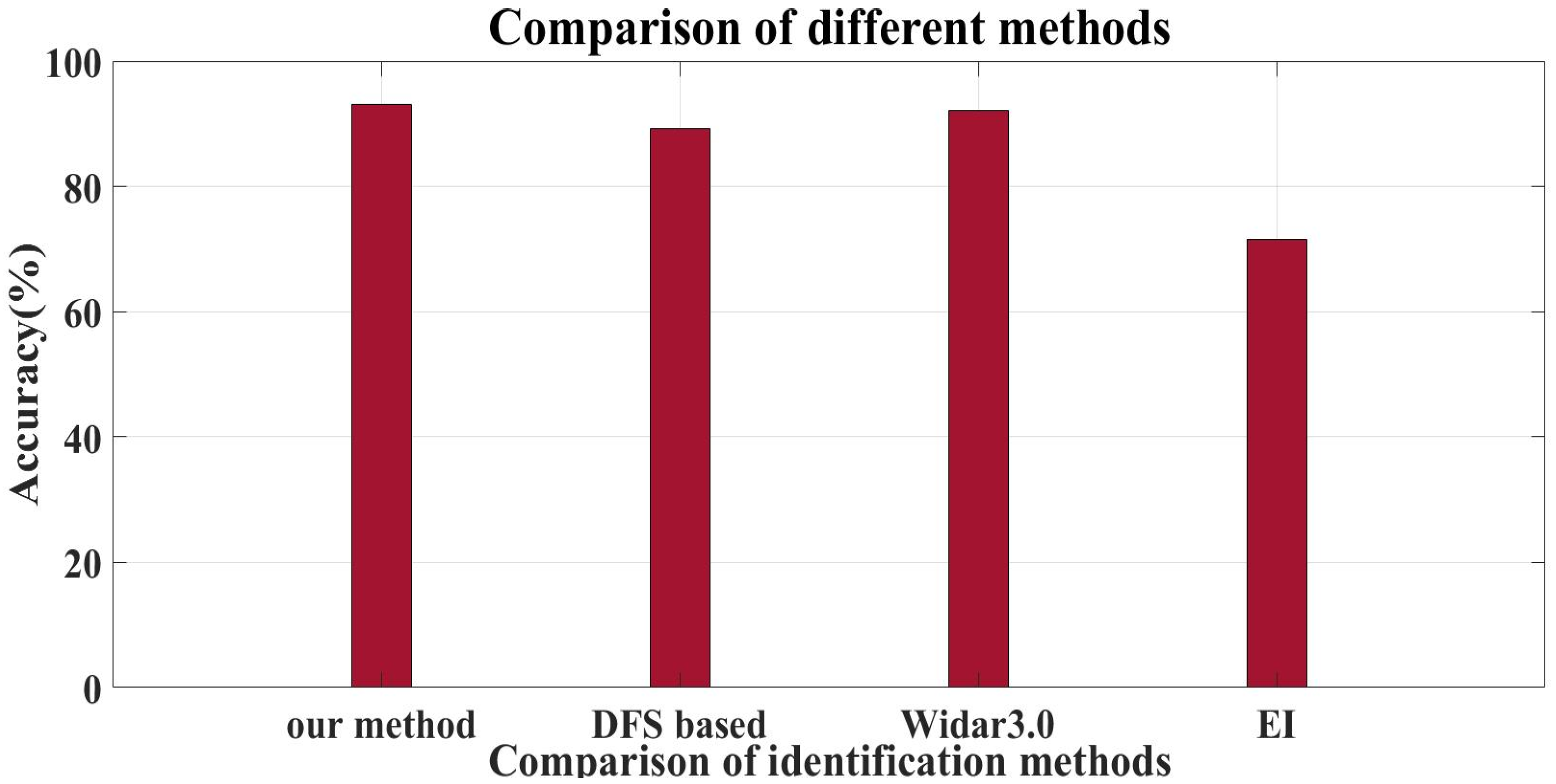
6.5. Comparative Analysis of Different Methods
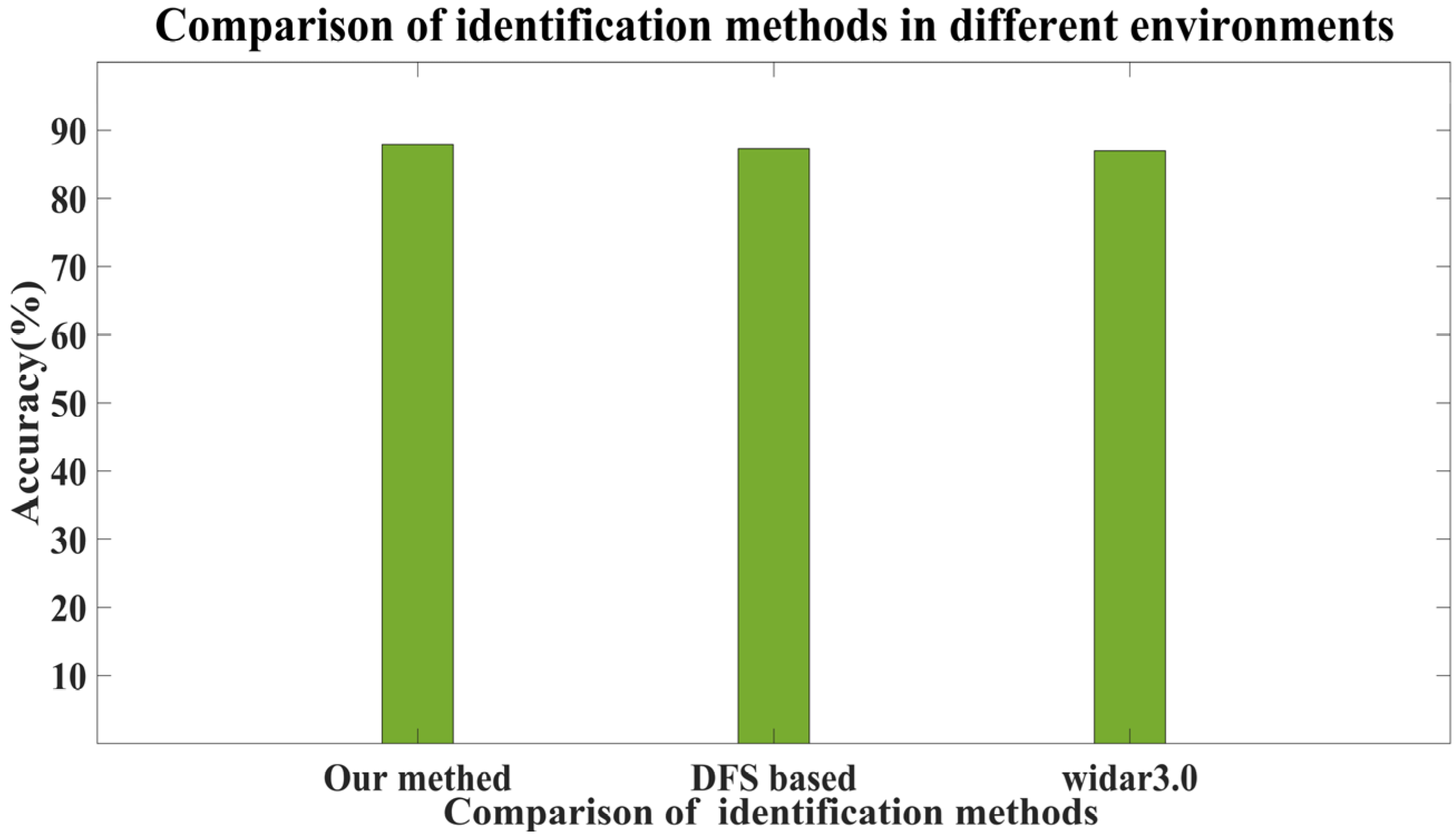
6.6. Comparison of Different Methods in Different Environments
7. Summary
8. Future Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, F. Human-computer interaction in IoT smart home. Home Technol. 2020, 1, 13–15. [Google Scholar]
- Lien, J.; Gillian, N.; Karagozler, M.E.; Amihood, P.; Schwesig, C.; Olson, E.; Raja, H.; Poupyrev, I. Soli: Ubiquitous gesture sensing with millimeter wave radar. ACM Trans. Graph. (TOG) 2016, 35, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Nymoen, K.; Haugen, M.R.; Jensenius, A.R. MuMYO-Evaluating and Exploring the MYO Armband for Musical Interaction. In Proceedings of the International Conference on New Interfaces for Musical Expression, Baton Rouge, LA, USA, 31 May–3 June 2015; pp. 215–218. [Google Scholar]
- Wu, H.Y.; Zhang, F.J.; Liu, Y.J.; Dai, G.Z. Research on key issues of vision-based gesture interfaces. Chin. J. Comput. 2009, 32, 2030–2041. [Google Scholar]
- Bu, Y.; Xie, L.; Gong, Y.; Wang, C.; Yang, L.; Liu, J.; Lu, S. RF-Dial: Rigid Motion Tracking and Touch Gesture Detection for Interaction via RFID Tags. IEEE Trans. Mob. Comput. 2022, 21, 1061–1080. [Google Scholar] [CrossRef]
- Ma, R.; Zhang, Z.; Chen, E. Human Motion Gesture Recognition Based on Computer Vision. Complexity 2021, 2021, 6679746. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, G.; Wang, S. WiFi sensing with channel state information: A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–36. [Google Scholar] [CrossRef] [Green Version]
- Shangguan, L.; Zhou, Z.; Jamieson, K. Enabling gesture-based interactions with objects. In Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services, Niagara Falls, NY, USA, 19–23 June 2017; pp. 239–251. [Google Scholar]
- Wang, J.; Vasisht, D.; Katabi, D. RF-IDraw: Virtual touch screen in the air using RF signals. ACM SIGCOMM Comput. Commun. Rev. 2014, 44, 235–246. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, Y.; Qian, K.; Zhang, G.; Liu, Y.; Wu, C.; Yang, Z. Zero effort cross domain gesture recognition with WiFi. In Proceedings of the 17th Annual International Conference on Mobile Systems, Applications, and Services, Seoul, Republic of Korea, 17–21 June 2019; ACM: New York, NY, USA, 2019; pp. 313–325. [Google Scholar]
- Li, C.; Liu, M.; Cao, Z. WiHF: Gesture and User Recognition with WiFi. IEEE Trans. Mob. Comput. 2022, 21, 757–768. [Google Scholar] [CrossRef]
- IEEE Dataport. Available online: https://ieee-dataport.org/open-access/widar30-wifi-based-activity-recognition-dataset (accessed on 10 October 2022).
- Gkioxari, G.; Girshick, R.; Dollár, P.; He, K. Detecting and recognizing human-object interactions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8359–8367. [Google Scholar]
- Xu, C.; Pathak, P.H.; Mohapatra, P. Finger-writing with smartwatch: A case for finger and hand gesture recognition using smartwatch. In Proceedings of the 16th International Workshop on Mobile Computing Systems and Applications, Santa Fe, NM, USA, 12–13 February 2015; pp. 9–14. [Google Scholar]
- Wen, H.; Ramos Rojas, J.; Dey, A.K. Serendipity: Finger gesture recognition using an off-the-shelf smartwatch. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 3847–3851. [Google Scholar]
- Liu, H.; Wang, Y.; Zhou, A.; He, H.; Wang, W.; Wang, K.; Pan, P.; Lu, Y.; Liu, L.; Ma, H. Real-time arm gesture recognition in smart home scenarios via millimeter wave sensing. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020, 4, 1–28. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Sun, K. Device-free gesture tracking using acoustic signals. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016; pp. 82–94. [Google Scholar]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A survey on wireless indoor localization from the device perspective. ACM Comput. Surv. (CSUR) 2016, 49, 1–31. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Zhu, Y.; Li, J.; Ji, Y. WiMate: Location-independent Material Identification Based on Commercial WiFi Devices. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 01–06. [Google Scholar]
- Mattela, G.; Tripathi, M.; Pal, C. A Novel Approach in WiFi CSI-Based Fall Detection. SN Comput. Sci. 2022, 3, 214. [Google Scholar] [CrossRef]
- Palipana, S.; Rojas, D.; Agrawal, P.; Pesch, D. FallDeFi: Ubiquitous fall detection using commodity Wi-Fi devices. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 1, 1–25. [Google Scholar] [CrossRef]
- Guo, L.; Wang, L.; Liu, J.; Zhou, W. A survey on motion detection using WiFi signals. In Proceedings of the 2016 12th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN), Hefei, China, 16–18 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 202–206. [Google Scholar]
- Chen, Y.; Dong, W.; Gao, Y.; Liu, X.; Gu, T. Rapid: A multimodal and device-free approach using noise estimation for robust person identification. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 1–27. [Google Scholar] [CrossRef]
- Abdelnasser, H.; Youssef, M.; Harras, K.A. Wigest: A ubiquitous wifi-based gesture recognition system. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Kowloon, Hong Kong, 26 April–1 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1472–1480. [Google Scholar]
- Bu, Q.; Yang, G.; Ming, X.; Zhang, T.; Feng, J.; Zhang, J. Deep transfer learning for gesture recognition with WiFi signals. Pers. Ubiquitous Comput. 2022, 26, 543–554. [Google Scholar] [CrossRef]
- Wu, W.; Yang, B.; Yu, H.; Wang, H. High-Accuracy WiFi-Based 3D Indoor Positioning Using Non-Uniform Planar Array. In Proceedings of the 2021 IEEE MTT-S International Wireless Symposium (IWS), Nanjing, China, 23–26 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–3. [Google Scholar]
- Gu, Y.; Zhan, J.; Ji, Y.; Li, J.; Ren, F.; Gao, S. MoSense: An RF-based motion detection system via off-the-shelf WiFi devices. IEEE Internet Things J. 2017, 4, 2326–2341. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, J. How can I guard my AP? Non-intrusive user identification for mobile devices using WiFi signals. In Proceedings of the 17th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Chennai, India, 10–14 July 2016; pp. 91–100. [Google Scholar]
- Tan, S.; Yang, J.; Chen, Y. Enabling fine-grained finger gesture recognition on commodity WiFi devices. IEEE Trans. Mob. Comput. 2020, 21, 2789–2802. [Google Scholar] [CrossRef]
- Jiang, W.; Miao, C.; Ma, F.; Yao, S.; Wang, Y.; Yuan, Y.; Xue, H.; Song, C.; Ma, X.; Koutsonikolas, D.; et al. Towards environment independent device free human activity recognition. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking, New Delhi, India, 29 October–2 November 2018; pp. 289–304. [Google Scholar]
- Chang, J.; Wang, K.; Wu, H. WiFi cross-scene gesture recognition under multi-view adversarial network. Mod. Electron. Technol. 2022, 45, 149–154. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Domain Features | Calculation Method |
|---|---|
| Average | |
| Standard deviation | |
| Skewness | |
| Steepness | |
| Maximum | |
| Minimum value | |
| Peak | |
| Root mean square | |
| Amplitude factor | |
| Waveform Factor | |
| Impact Factor | |
| Yield Factor | |
| Energy |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Yuan, B.; Yang, Z.; Li, Z.; Liu, X. Wi-NN: Human Gesture Recognition System Based on Weighted KNN. Appl. Sci. 2023, 13, 3743. https://doi.org/10.3390/app13063743
Zhang Y, Yuan B, Yang Z, Li Z, Liu X. Wi-NN: Human Gesture Recognition System Based on Weighted KNN. Applied Sciences. 2023; 13(6):3743. https://doi.org/10.3390/app13063743
Chicago/Turabian StyleZhang, Yajun, Bo Yuan, Zhixiong Yang, Zijian Li, and Xu Liu. 2023. "Wi-NN: Human Gesture Recognition System Based on Weighted KNN" Applied Sciences 13, no. 6: 3743. https://doi.org/10.3390/app13063743