
Estimating the Soundscape Structure and Dynamics of Forest Bird Vocalizations in an Azimuth-Elevation Space Using a Microphone Array
 , and
, and 
Abstract
:1. Introduction
2. Methods
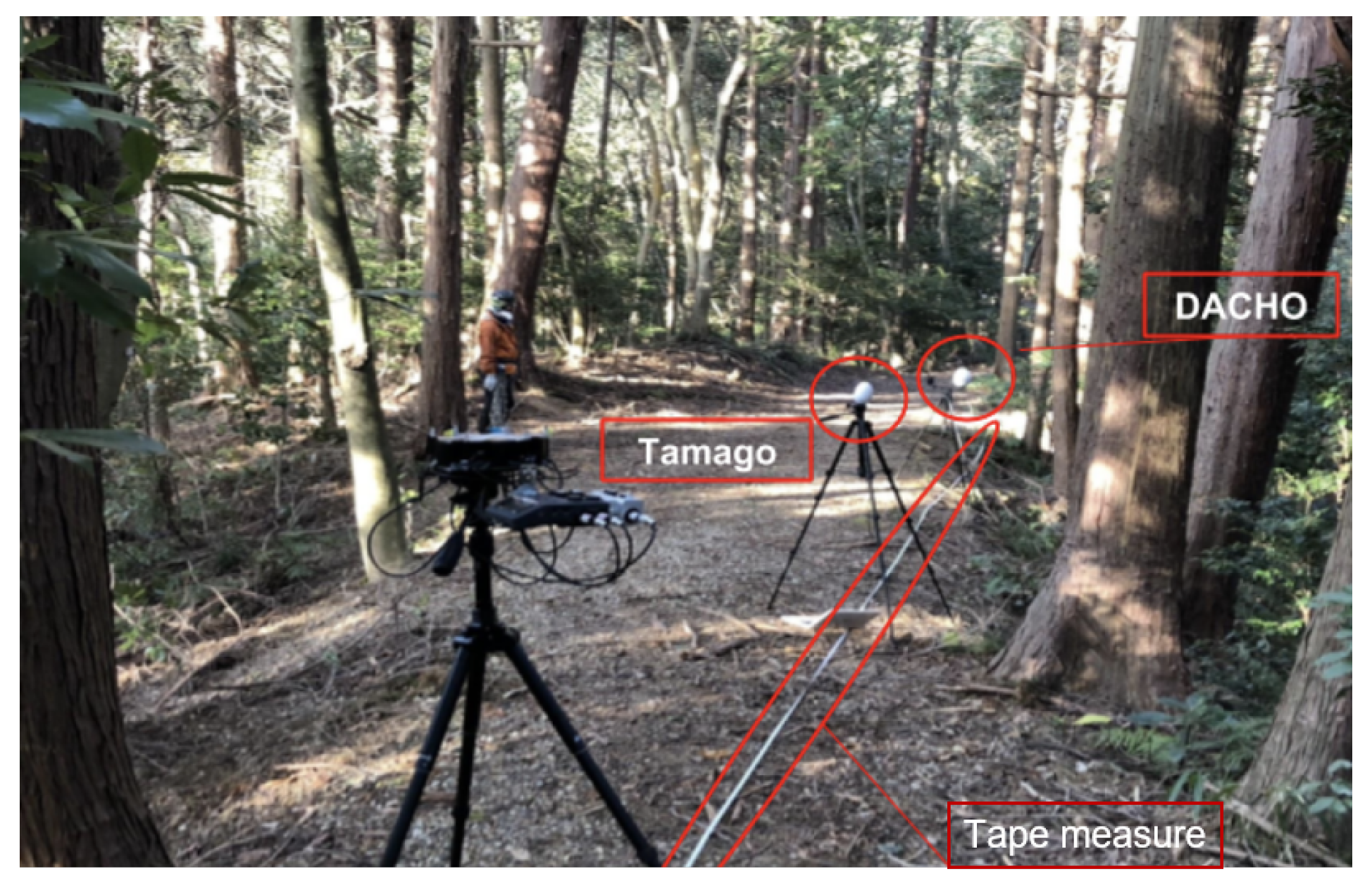
2.1. Speaker Test
2.2. Field Observation of Soundscape Dynamics of Bird Vocalizations
2.3. Bird Song Localization Using HARKBird
3. Results
3.1. Speaker Test
3.2. Field Observation of Soundscapes of Bird Vocalizations
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gasc, A.; Francomano, D.; Dunning, J.B.; Pijanowski, B.C. Future directions for soundscape ecology: The importance of ornithological contributions. Auk 2016, 134, 215–228. [Google Scholar] [CrossRef] [Green Version]
- Stowell, D. Computational Bioacoustic Scene Analysis. In Computational Analysis of Sound Scenes and Events; Virtanen, T., Plumbley, M.D., Ellis, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; Chapter 11; pp. 303–333. [Google Scholar]
- Farina, A.; Gage, S.H. Ecoacoustics: The Ecological Role of Sounds; John Wiley and Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Catchpole, C.K.; Slater, P.J.B. Bird Song: Biological Themes and Variations; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Goëau, H.; Gloti, H.; Vellinga, W.P.; Planqué, R.; Joly, A. LifeCLEF Bird Identification Task 2016: The arrival of Deep learning. In Proceedings of the CLEF: Conference and Labs of the Evaluation Forum, Évora, Portugal, 5–8 September 2016. [Google Scholar]
- Suzuki, R.; Cody, M.L. Complex systems approaches to temporal soundspace partitioning in bird communities as a self-organizing phenomenon based on behavioral plasticity. Artif. Life Robot. 2019, 24, 439–444. [Google Scholar] [CrossRef]
- Rhinehart, T.A.; Chronister, L.M.; Devlin, T.; Kitzes, J. Acoustic localization of terrestrial wildlife: Current practices and future opportunities. Ecol. Evol. 2020, 10, 6794–6818. [Google Scholar] [CrossRef] [PubMed]
- Harlow, Z.; Collier, T.; Burkholder, V.; Taylor, C.E. Acoustic 3D localization of a tropical songbird. In Proceedings of the IEEE China Summit and International Conference on Signal and Information Processing (ChinaSIP), Beijing, China, 6–10 July 2013; pp. 220–224. [Google Scholar]
- Hedley, R.W.; Huang, Y.; Yao, K. Direction-of-arrival estimation of animal vocalizations for monitoring animal behavior and improving estimates of abundance. Avian Conserv. Ecol. 2017, 12, 6. [Google Scholar] [CrossRef] [Green Version]
- Gabriel, D.; Kojima, R.; Hoshiba, K.; Itoyama, K.; Nishida, K.; Nakadai, K. Case study of bird localization via sound in 3D space. In Proceedings of the 36th Annual Conference of the Robotics Society of Japan, Tokyo, Japan, 21 August 2018; p. RSJ2018AC1I2–06. [Google Scholar]
- Nguyen, T.N.T.; Watcharasupat, K.N.; Lee, Z.J.; Nguyen, N.K.; Jones, D.L.; Gan, W.S. What makes sound event localization and detection difficult? Insights from error analysis. In Proceedings of the 6th Workshop on Detection and Classification of Acoustic Scenes and Events (DCASE 2021), online, 15–19 November 2021; pp. 120–124. [Google Scholar]
- Nakadai, K.; Okuno, H.G.; Mizumoto, T. Development, Deployment and Applications of Robot Audition Open Source Software HARK. J. Robot. Mechatronics 2017, 27, 16–25. [Google Scholar] [CrossRef]
- Sumitani, S.; Suzuki, R.; Matsubayashi, S.; Arita, T.; Nakadai, K.; Okuno, H.G. An integrated framework for field recording, localization, classification and annotation of birdsongs using robot audition techniques - HARKBird 2.0. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Brighton, UK, 12–17 May 2019; pp. 8246–8250. [Google Scholar]
- Suzuki, R.; Sumitani, S.; Naren, N.; Matsubayashi, S.; Arita, T.; Nakadai, K.; Okuno, H.G. Field observations of ecoacoustic dynamics of a Japanese bush warbler using an open-source software for robot audition HARK. J. Ecoacoustics 2018, 2, EYAJ46. [Google Scholar] [CrossRef]
- Sumitani, S.; Suzuki, R.; Matsubayashi, S.; Arita, T.; Nakadai, K.; Okuno, H.G. Fine-scale observations of spatio-spectro-temporal dynamics of bird vocalizations using robot audition techniques. Remote Sens. Ecol. Conserv. 2020, 7, 18–35. [Google Scholar] [CrossRef] [Green Version]
- Huang, Q.; Swatantran, A.; Dubayah, R.; Goetz, S.J. The Influence of Vegetation Height Heterogeneity on Forest and Woodland Bird Species Richness across the United States. PLoS ONE 2014, 9, 103236. [Google Scholar] [CrossRef] [Green Version]
- Matsubayashi, S.; Saito, F.; Suzuki, R.; Matsubayashi, S.; Arita, T.; Nakadai, K.; Okuno, H.G. Observing Nocturnal Birds Using Localization Techniques. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integrations (SII), Virtual, 11–14 January 2021; pp. 493–498. [Google Scholar]
- Suzuki, R.; Matsubayashi, S.; Saito, F.; Murate, T.; Masuda, T.; Yamamoto, Y.; Kojima, R.; Nakadai, K.; Okuno, H.G. A Spatiotemporal Analysis of Acoustic Interactions between Great Reed Warblers (Acrocephalus arundinaceus) Using Microphone Arrays and Robot Audition Software HARK. Ecol. Evol. 2018, 8, 812–825. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R. Bayesian Nonparametrics for Microphone Array Processing. IEEE Trans. Antennas Propag. (TAP) 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Nakajima, H.; Nakadai, K.; Hasegawa, Y.; Tsujino, H. Blind source separation with parameter-free adaptive step-size method for robot audition. IEEE Trans. Audio Speech Lang. Process. 2010, 18, 1476–1484. [Google Scholar] [CrossRef]
- Suzuki, R.; Matsubayashi, S.; Nakadai, K.; Okuno, H.G. HARKBird: Exploring acoustic interactions in bird communities using a microphone array. J. Robot. Mechatronics 2017, 27, 213–223. [Google Scholar] [CrossRef] [Green Version]
- Sumitani, S.; Suzuki, R.; Matsubayashi, S.; Arita, T.; Nakadai, K.; Okuno, H.G. Extracting the relationship between the spatial distribution and types of bird vocalizations using robot audition system HARK. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 2485–2490. [Google Scholar]
- Nakamura, K.; Nakadai, K.; Okuno, H.G. A real-time super-resolution robot audition system that improves the robustness of simultaneous speech recognition. Adv. Robot. 2013, 27, 933–945. [Google Scholar] [CrossRef]
- Okutani, K.; Yoshida, T.; Nakamura, K.; Nakadai, K. Outdoor Auditory Scene Analysis Using a Moving Microphone Array Embedded in a Quadrocopter. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2012), Algarve, Portugal, 7–12 October 2012; pp. 3288–3293. [Google Scholar]
- Verreycken, E.; Simon, R.; Quirk-Royal, B.; Daems, W.; Barber, J.; Steckel, J. Bio-acoustic tracking and localization using heterogeneous, scalable microphone arrays. Commun. Biol. 2021, 4, 1275. [Google Scholar] [CrossRef] [PubMed]
- Gayk, Z.; Mennill, D.J. Pinpointing the position of flying songbirds with a wireless microphone array: Three-dimensional triangulation of warblers on the wing. Bioacoustics 2019, 29, 375–386. [Google Scholar] [CrossRef]
- Matsubayashi, S.; Nakadai, K.; Suzuki, R.; Ura, T.; Hasebe, M.; Okuno, H.G. Auditory Survey of Endangered Eurasian Bittern Using Microphone Arrays and Robot Audition. Front. Robot. AI 2022, 9, 854572. [Google Scholar] [CrossRef] [PubMed]
- Hedley, R.W.; Wilson, S.J.; Yip, D.A.; Li, K.; Bayne, E.M. Distance truncation via sound level for bioacoustic surveys in patchy habitat. Bioacoustics 2021, 30, 303–323. [Google Scholar] [CrossRef]
- Politis, A.; Shimada, K.; Sudarsanam, P.; Adavanne, S.; Krause, D.; Koyama, Y.; Takahashi, N.; Takahashi, S.; Mitsufuji, Y.; Virtanen, T. STARSS22: A dataset of spatial recordings of real scenes with spatiotemporal annotations of sound events. arXiv 2022, arXiv:2206.01948. [Google Scholar]
- Tan, M.; Chao, W.; Cheng, J.K.; Zhou, M.; Ma, Y.; Jiang, X.; Ge, J.; Yu, L.; Feng, L. Animal Detection and Classification from Camera Trap Images Using Different Mainstream Object Detection Architectures. Anim. Open Access J. MDPI 2022, 12, 1976. [Google Scholar] [CrossRef] [PubMed]
- Tulloch, A.I.; Possingham, H.P.; Joseph, L.N.; Szabo, J.; Martin, T.G. Realising the full potential of citizen science monitoring programs. Biol. Conserv. 2013, 165, 128–138. [Google Scholar] [CrossRef] [Green Version]
- Wood, C.M.; Kahl, S.; Rahaman, A.; Klinck, H. The machine learning–powered BirdNET App reduces barriers to global bird research by enabling citizen science participation. PLoS Biol. 2022, 20, e3001670. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Slot (s) | # of Localized Songs | Azimuth Variation () | Elevation Variation () |
|---|---|---|---|
| A (0–100) | 37 | 0.87 | 0.07 |
| B (550–650) | 31 | 1.15 | 0.10 |
| C (650–750) | 46 | 0.81 | 0.04 |
| D (750–850) | 57 | 0.76 | 0.06 |
| E (900–1000) | 45 | 0.48 | 0.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suzuki, R.; Hayashi, K.; Osaka, H.; Matsubayashi, S.; Arita, T.; Nakadai, K.; Okuno, H.G. Estimating the Soundscape Structure and Dynamics of Forest Bird Vocalizations in an Azimuth-Elevation Space Using a Microphone Array. Appl. Sci. 2023, 13, 3607. https://doi.org/10.3390/app13063607
Suzuki R, Hayashi K, Osaka H, Matsubayashi S, Arita T, Nakadai K, Okuno HG. Estimating the Soundscape Structure and Dynamics of Forest Bird Vocalizations in an Azimuth-Elevation Space Using a Microphone Array. Applied Sciences. 2023; 13(6):3607. https://doi.org/10.3390/app13063607
Chicago/Turabian StyleSuzuki, Reiji, Koichiro Hayashi, Hideki Osaka, Shiho Matsubayashi, Takaya Arita, Kazuhiro Nakadai, and Hiroshi G. Okuno. 2023. "Estimating the Soundscape Structure and Dynamics of Forest Bird Vocalizations in an Azimuth-Elevation Space Using a Microphone Array" Applied Sciences 13, no. 6: 3607. https://doi.org/10.3390/app13063607