

Sensitivity Study of Highway Tunnel Light Environment Parameters Based on Pupil Change Experiments and CNN Judging Method
Abstract
:1. Introduction
2. Acquisition of Eye-Movement Characteristics Parameters Required for the Convolutional Neural Network (CNN) Judging Method
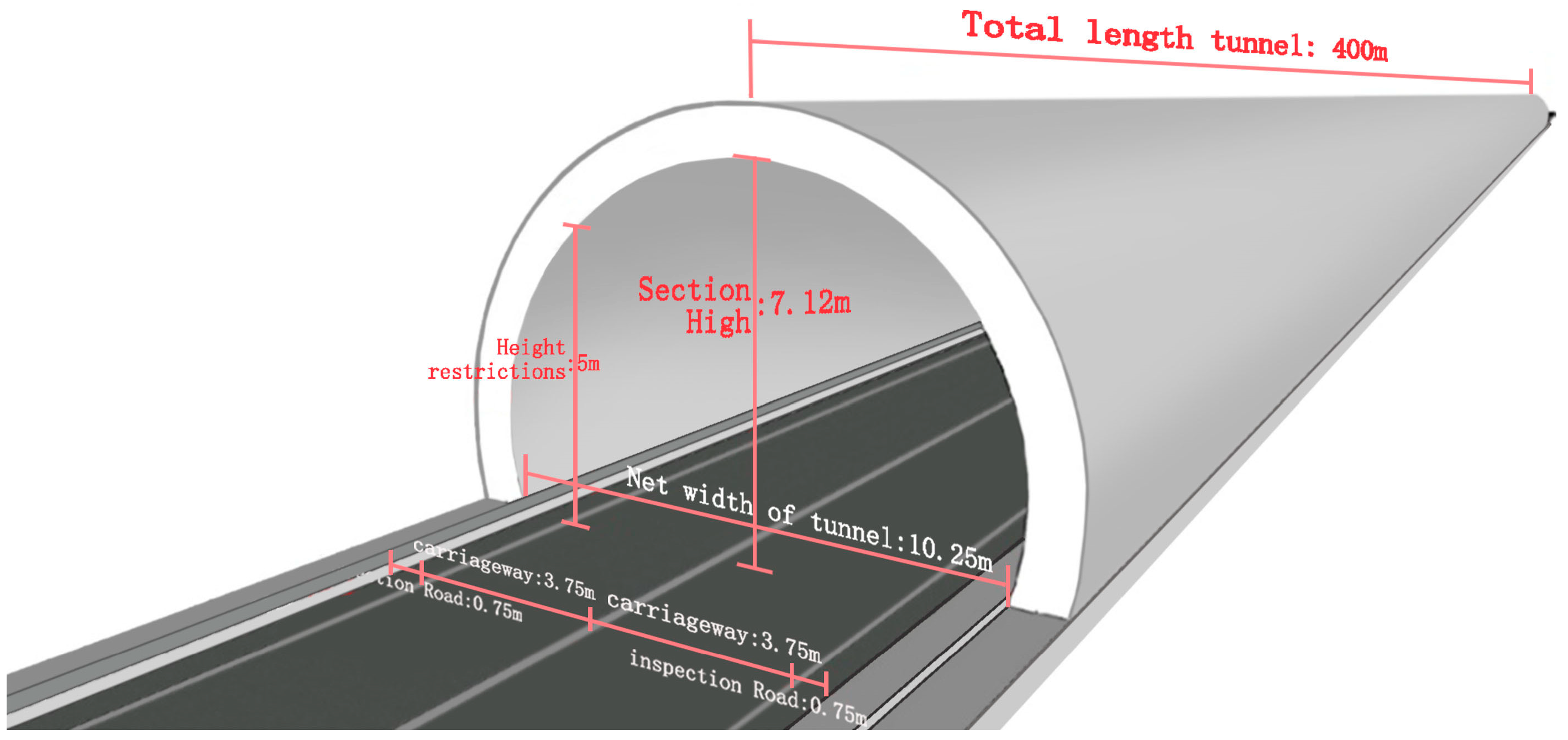
2.1. Experimental Light Environment Composition
2.1.1. Side Wall Reflective Material Laying Height Setting
2.1.2. Color Selection of Sidewall Reflective Material
2.1.3. Luminaire Color Temperature Settings
2.1.4. Lighting Layout Settings
2.2. Experimental Protocol
2.2.1. Orthogonal Experimental Design
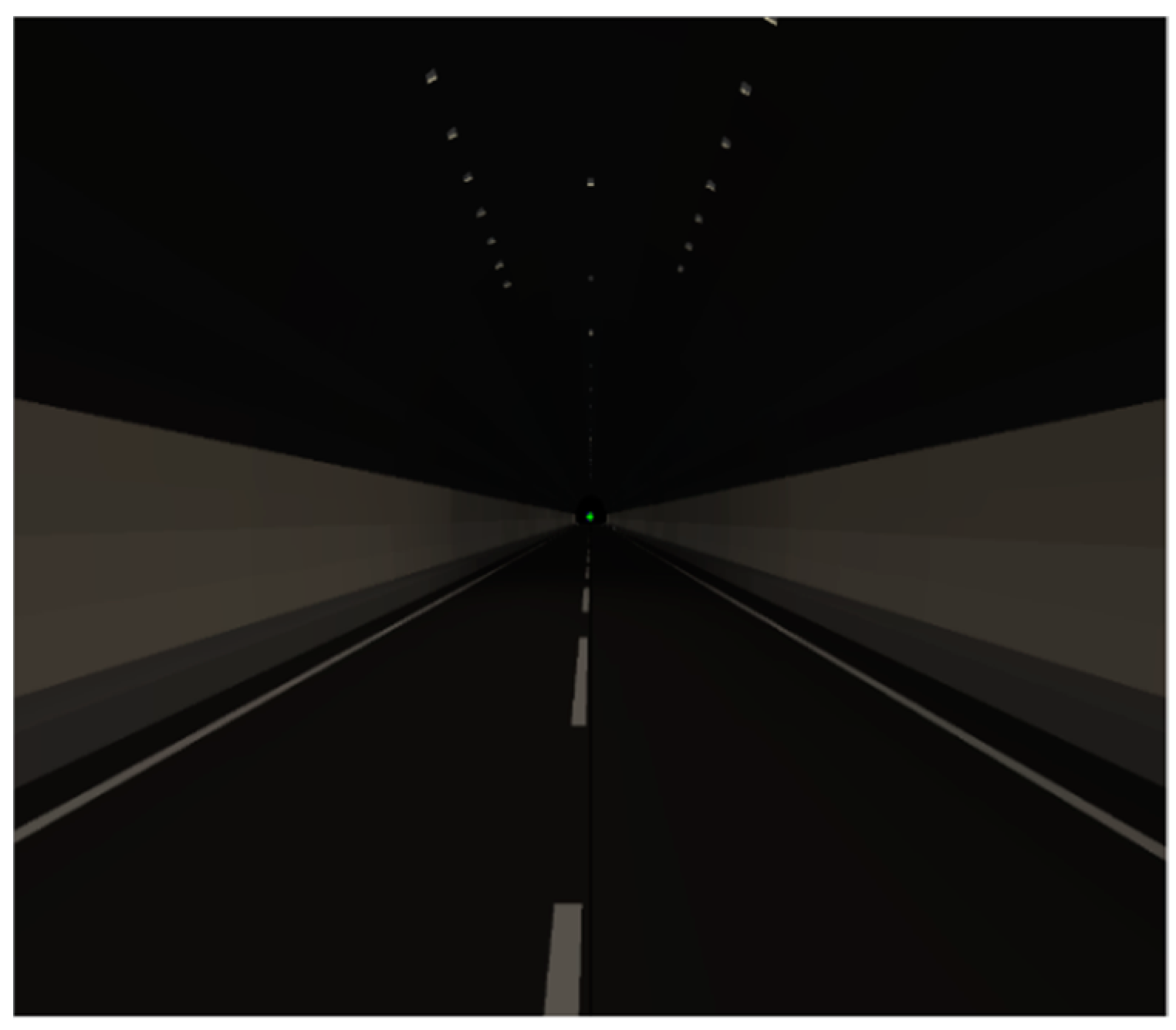
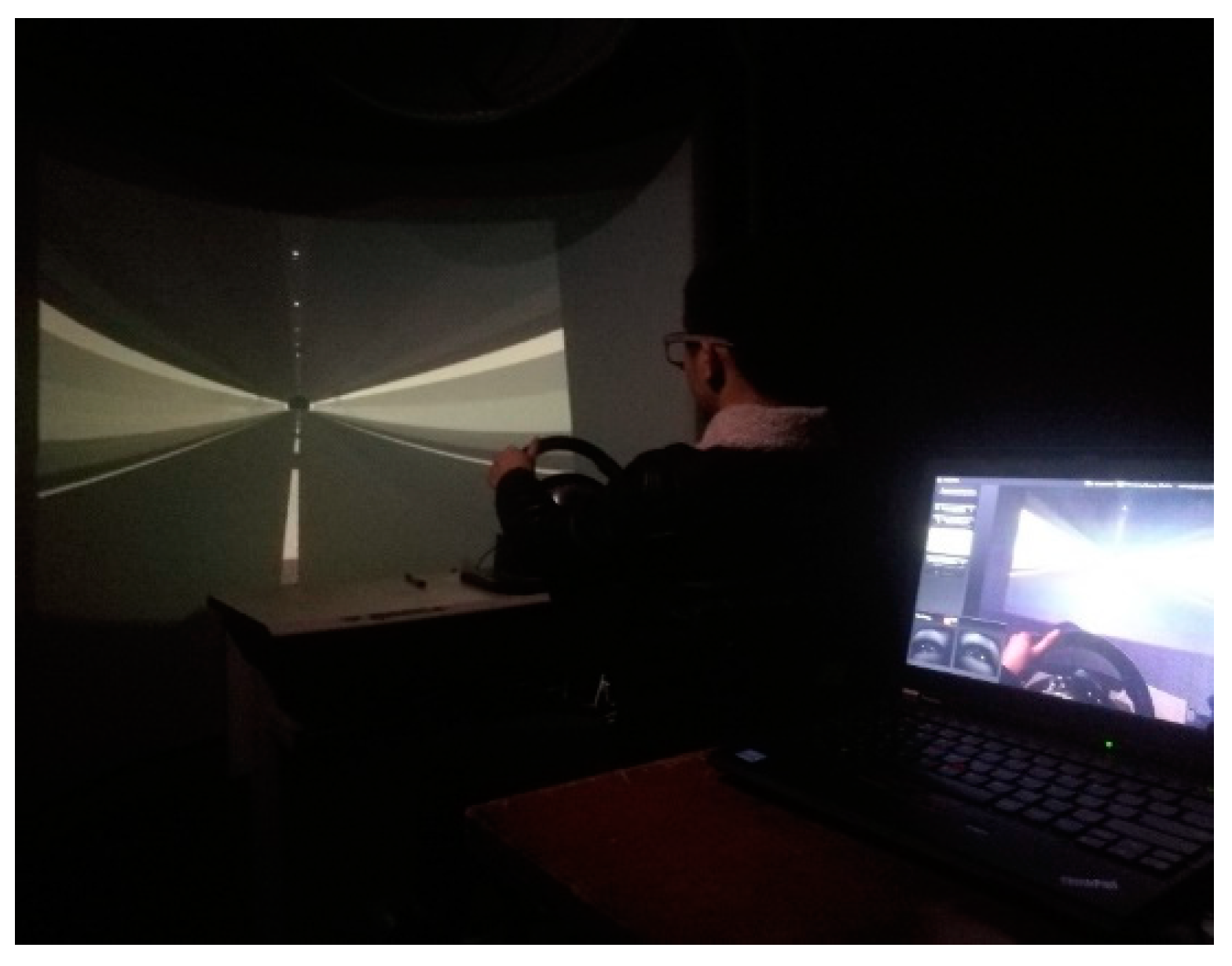
2.2.2. Dynamic Driving Simulation Test
- (1)
- Test Working Conditions
- (2)
- Test Model and Parameters
- (3)
- Experimental Testing
2.3. Experimental Results
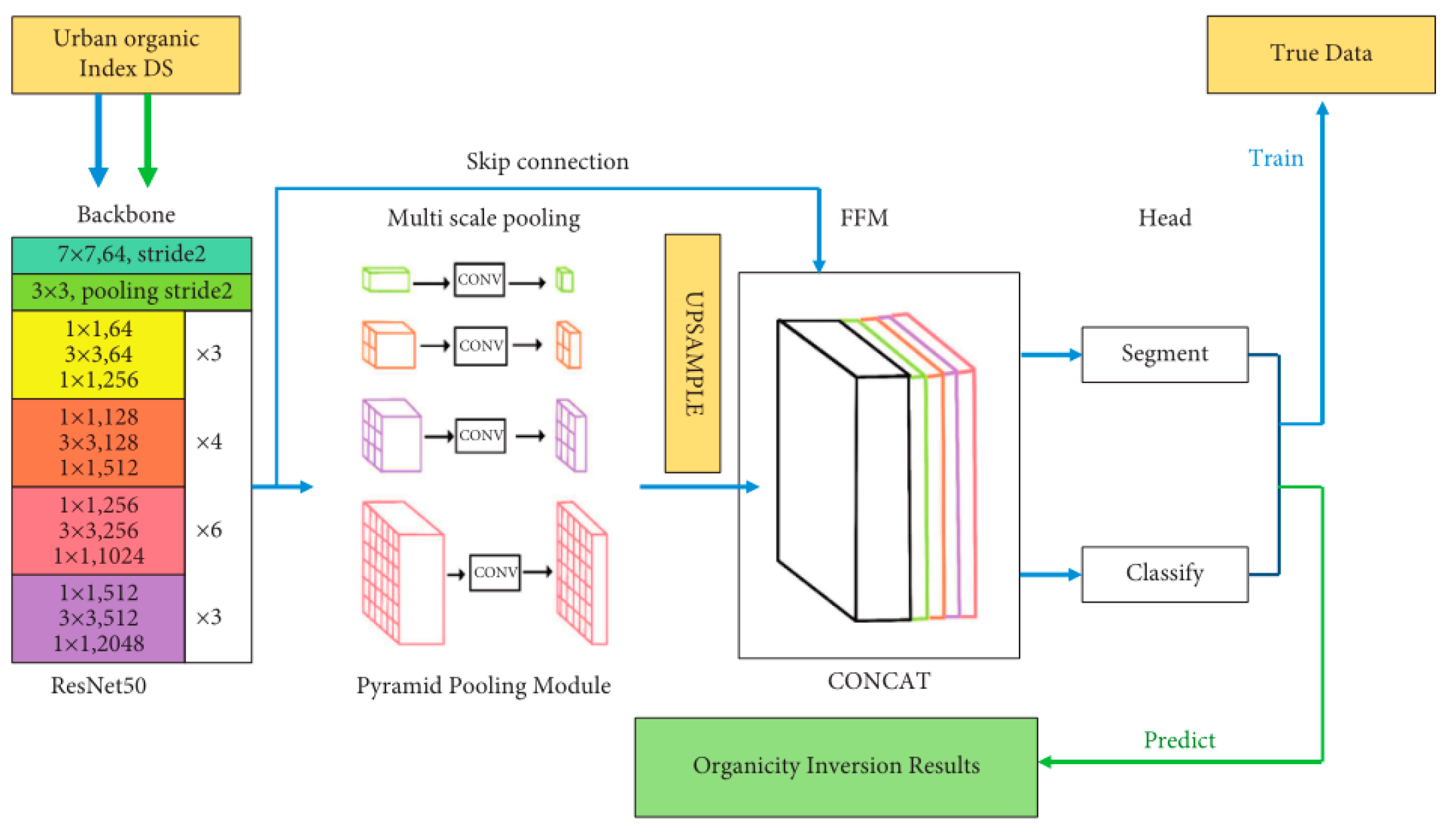
3. Convolutional Neural Network Judging Model Construction
3.1. Main Structure
- Calculate the mean value of batch data:
- Calculate the variance of the batch data:
- Normalization:
- Scale changes and offsets: ,
- Return value: the learned parameters scale factor and translation factor .
3.2. Loss Function
3.3. Training and Prediction
4. Sensitivity Evaluation Analysis of Light Environment Parameters in the Middle Section of Tunnel Based on Convolutional Neural Network
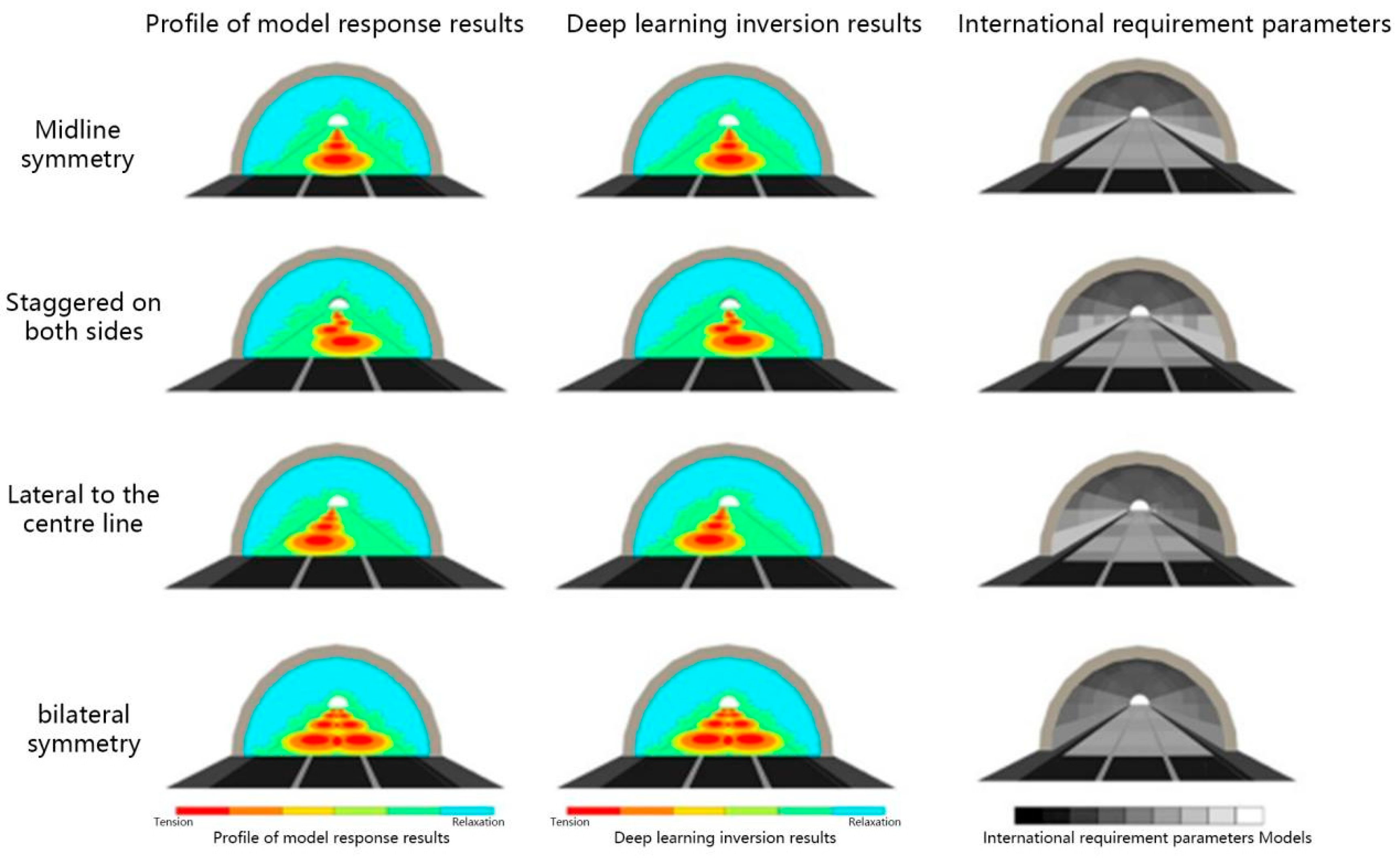
4.1. Sensitivity Analysis of Luminaire Deployment Methods
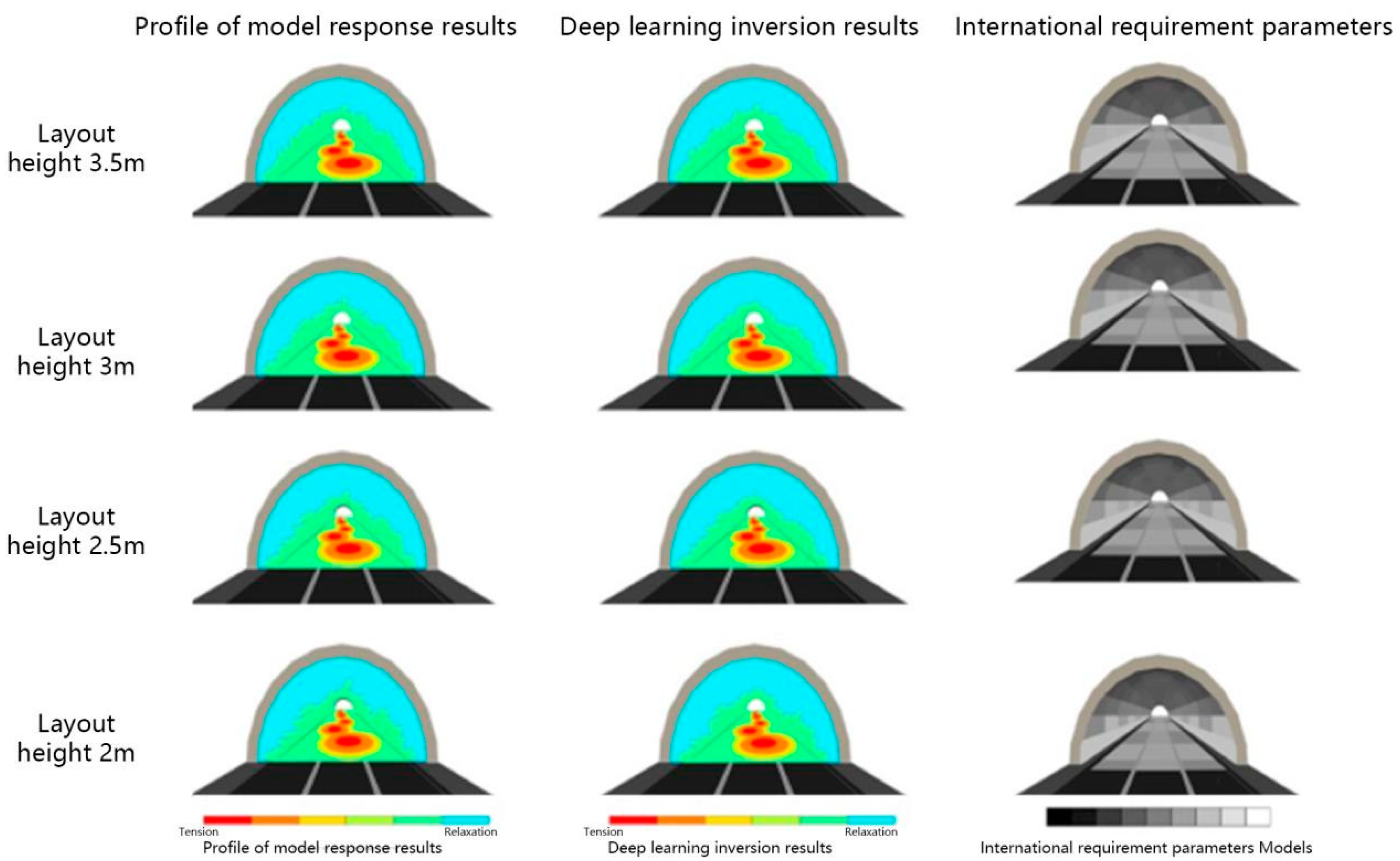
4.2. Side Wall Reflective Paint Placement Height Sensitivity Analysis
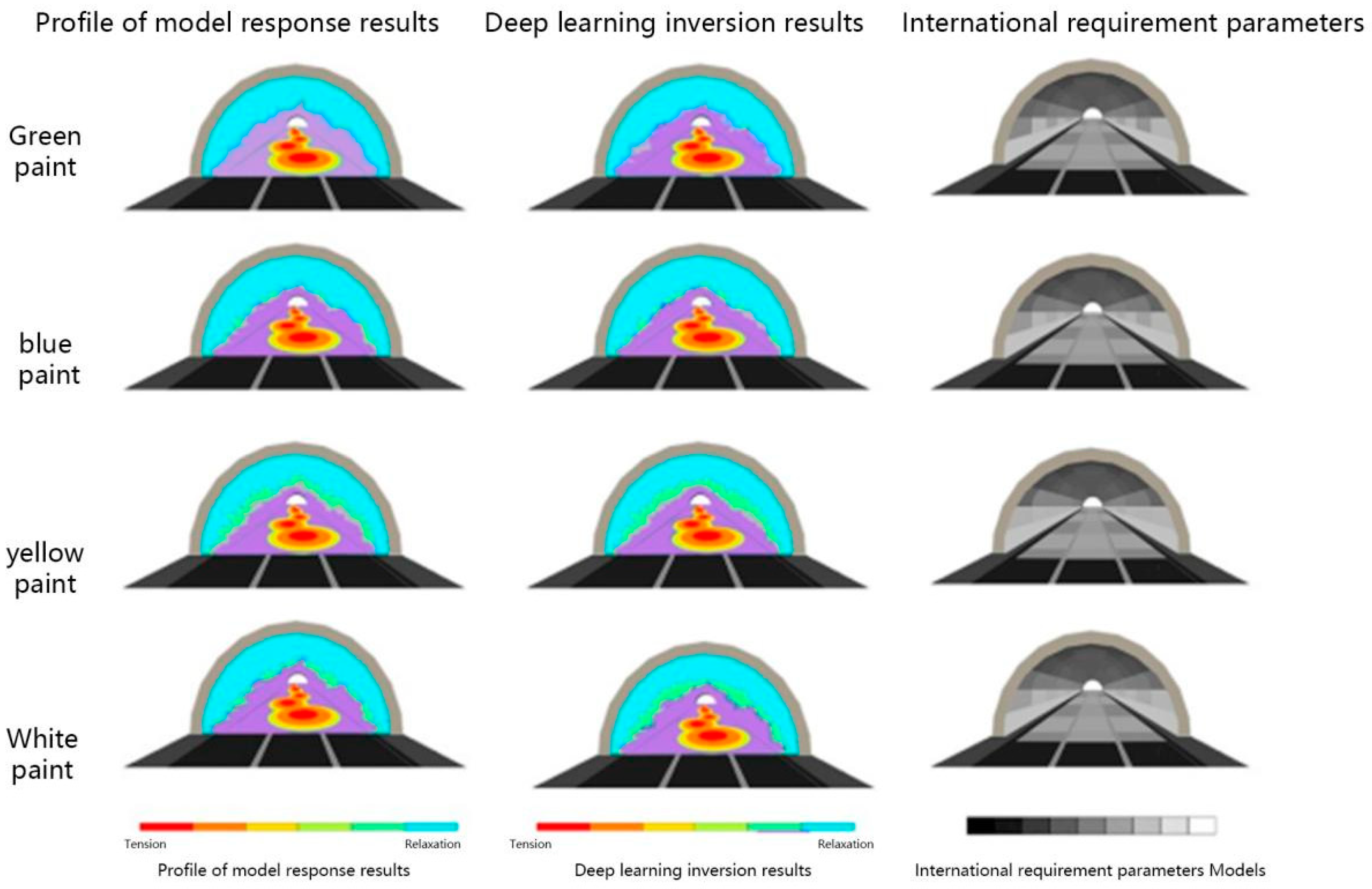
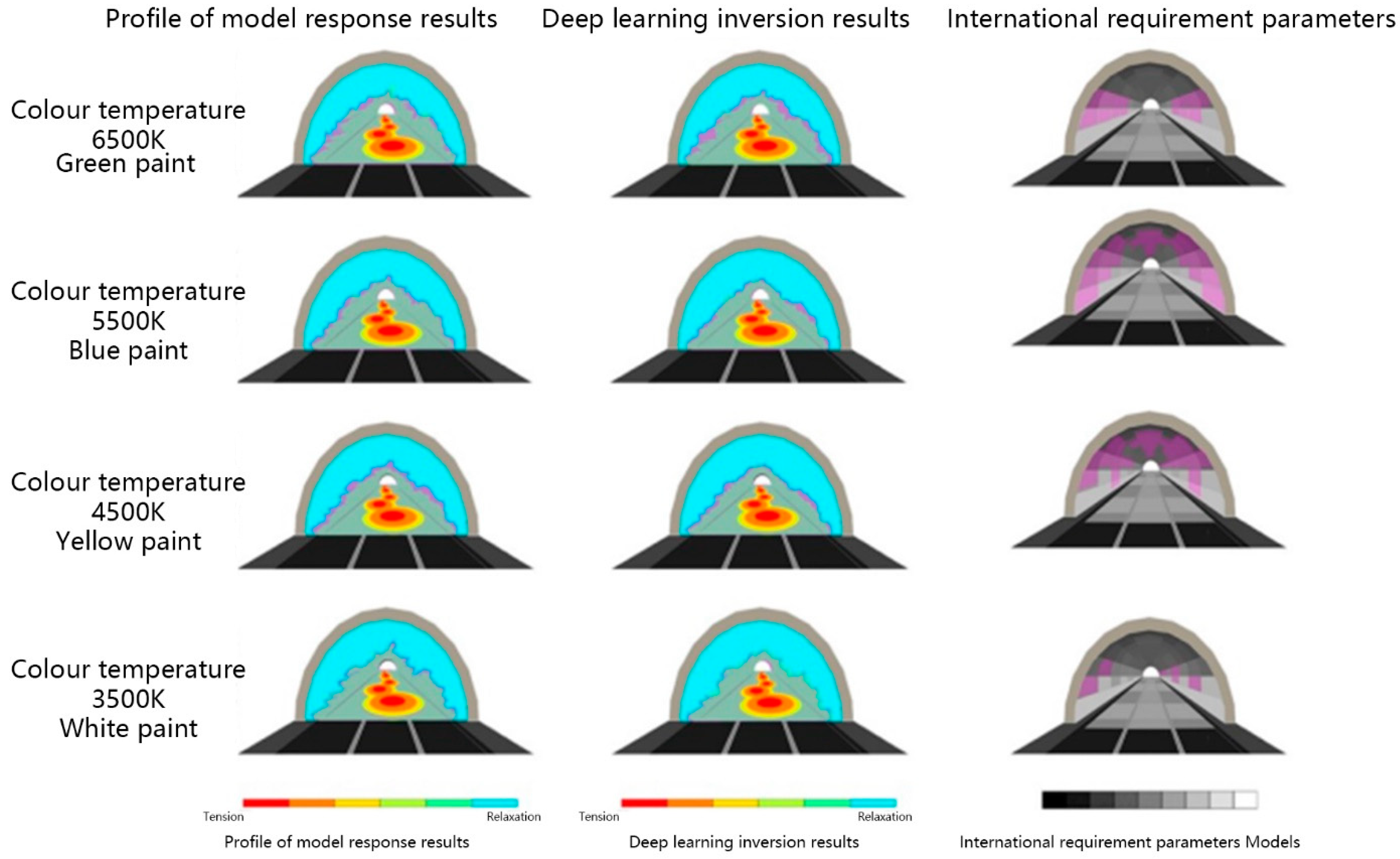
4.3. Color Sensitivity Analysis of Sidewall Reflective Coatings
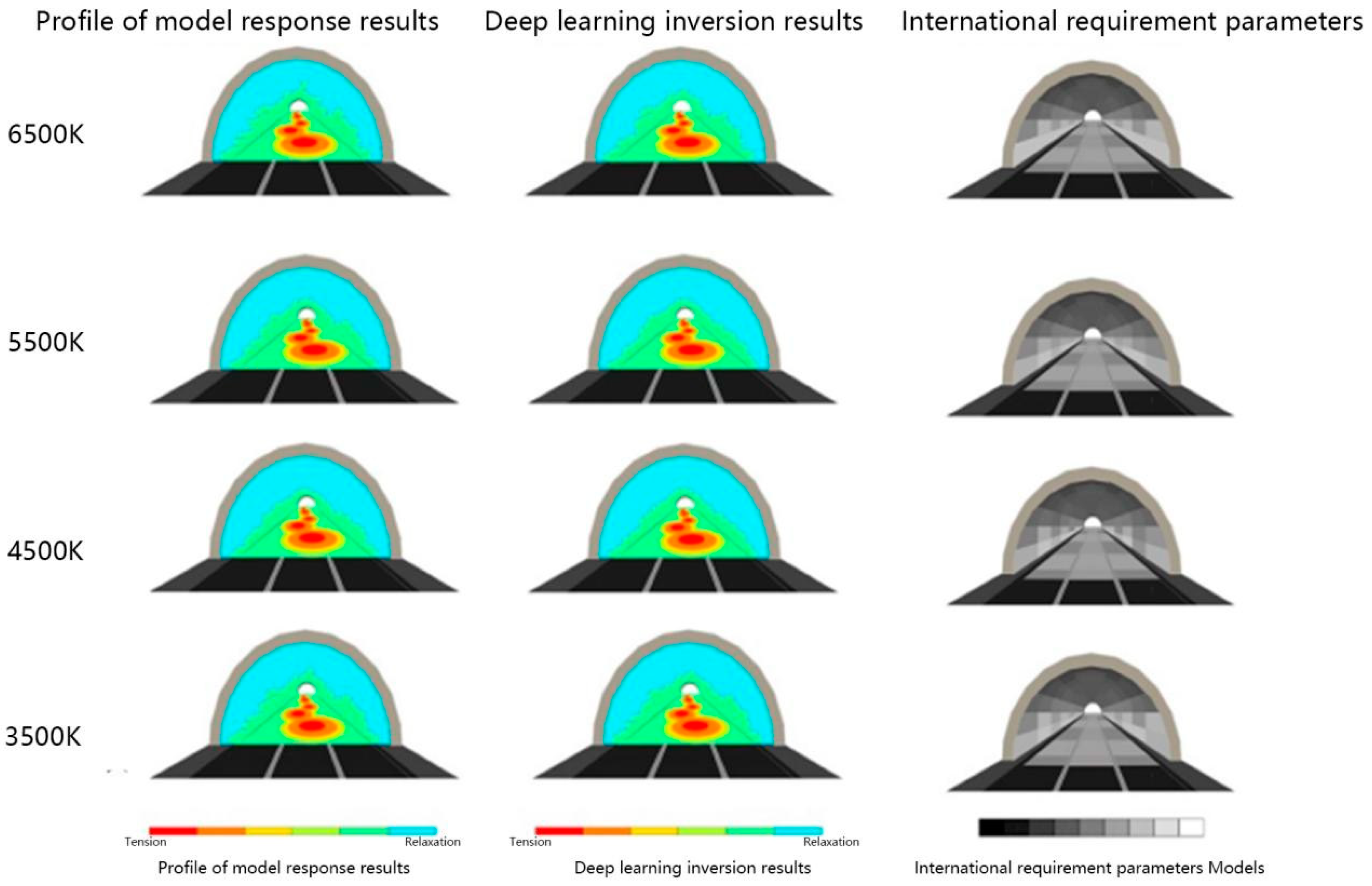
4.4. Led Light Source Color Temperature Sensitivity Analysis
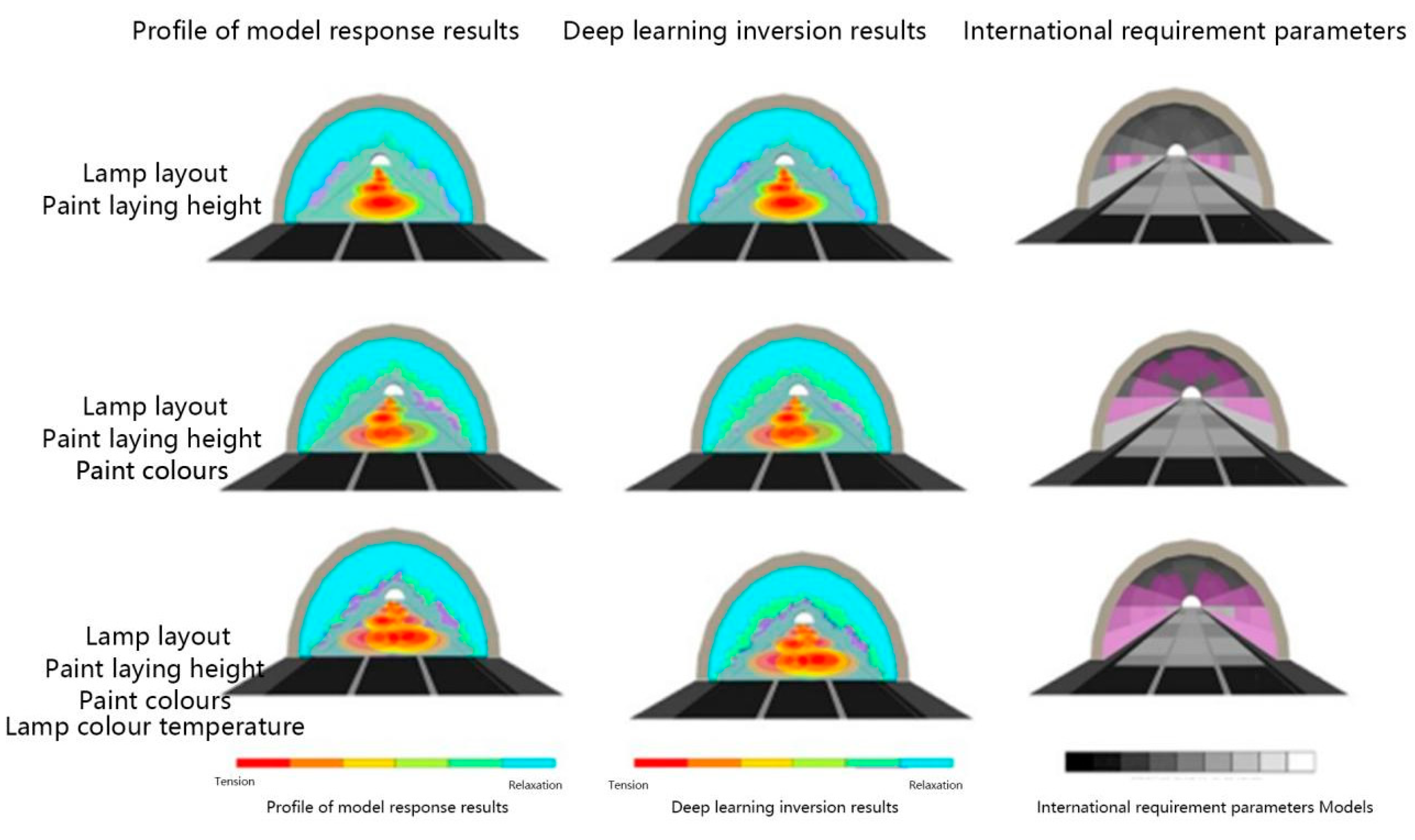
4.5. Comprehensive Sensitivity Analysis of Light Environment Parameters
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, B.; Yang, T. The Design of Tunnel Lighting Intelligent Control System. In Proceedings of the 3rd International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS 2018), Xiamen, China, 25–26 January 2018; pp. 610–613. [Google Scholar]
- Liu, Y.; Peng, L.; Lin, L.; Chen, Z.; Weng, J.; Zhang, Q. The impact of LED spectrum and correlated color temperature on driving safety in long tunnel lighting. Tunn. Undergr. Space Technol. 2021, 112, 103867. [Google Scholar] [CrossRef]
- Cui, L.; Chen, Z.; Yin, Y. Research on tunnel lighting safety and light color of light sources. J. Light. Eng. 2009, 20, 24–29. [Google Scholar]
- Liu, Y.; Weng, J.; Chen, J.; Chen, Z. The effect of light source light color on tunnel lighting effect. Civ. Archit. Environ. Eng. 2013, 35, 162–166. [Google Scholar]
- Liu, Z.; Li, P.; Jiang, H.; Wang, D. Application of color temperature controllability in LED lighting environment of highway tunnel. E3S Web Conf. 2021, 233, 01101–01106. [Google Scholar] [CrossRef]
- Hu, J.; Gao, X.; Wang, R.; Xu, P.; Miao, G. Safety evaluation index of daytime lighting at tunnel entrances. Adv. Mech. Eng. 2019, 68–73. [Google Scholar] [CrossRef]
- Du, F.; Mao, J.; Wang, Q.; Wu, C. The hardy type inequality on metric measure spaces. J. Korean Math. Soc. 2018, 55, 1359–1380. [Google Scholar]
- He, S.Y.; Liang, B.; Zhong, S.M.; Pan, G.B. Research on the evaluation method of highway tunnel lighting based on indoor simulation of light environment and visual efficacy experiment. J. Chongqing Jiaotong Univ. (Nat. Sci. Ed.) 2020, 39, 27–35. [Google Scholar]
- Hu, Y.; Chen, Z.; Zhang, Q.; Weng, J.; Huang, K.; Lin, Y. A brightness determination method for the entrance section of highway tunnels considering drivers’ visual adaptation. Civ. Constr. Environ. Eng. 2016, 4, 20–26. [Google Scholar]
- Wang, S. Study on the visual characteristics of drivers at the entrance section of highway tunnels. Automot. Pract. Technol. 2016, 9, 108–113. [Google Scholar]
- CIE. Tunnel Entrance Lighting: A Survey of Fundamentals for Determining the Luminance in the Threshold Zone; CIE Technical Report, 61-1984; CIE: Paris, France, 2022; Available online: https://cie.co.at/publications/visual-aspects-time-modulated-lighting-systems (accessed on 18 November 2022).
- Liu, Y.; Chen, J.; Zhang, Q.; Weng, J. Influence of light source color temperature on traffic safety of tunnel entrance section based on reaction time. Road Traffic Technol. 2015, 2, 114–118. [Google Scholar]
- Yang, Y.; Han, W.Y.; Yan, M.; Jiang, H.F.; Zhu, L.W. Performance analysis of highway lighting light sources based on visual efficacy method. Spectrosc. Spectr. Anal. 2015, 10, 2686–2690. [Google Scholar]
- Tang, X. Application of DIALux software in the design of tunnel lighting dimming. Highw. Traffic Technol. 2016, 32, 126–129. [Google Scholar]
- Liang, B.; Wei, Q.; Li, Y.; He, S. Research on the method of laying reflective materials on the sidewall of the entrance section of highway tunnel based on DIALux. J. Chongqing Jiaotong Univ. (Nat. Sci. Ed.) 2019, 38, 20–26. [Google Scholar]
- Cui, Y.; Sun, Y.; Gu, Y.; Zheng, G. Research on quantitative analysis technology of highway tunnel lighting based on DIALux software. China Light. Electr. Appl. 2019, 7, 10–13. [Google Scholar]
- Shi, K. DIALux evo-based tunnel lighting design and rational validation. China Transp. Informatiz. 2021, 224–225. Available online: https://www.cnki.com.cn/Article/CJFDTotal-JTXC2021S1064.htm (accessed on 18 November 2022).
- Huang, Z.; Liao, M.; Zhang, H.; Zhang, G.; Ma, S. Prediction of extrusion deformation of tunnel surrounding rock based on SVM-BP model with incomplete data. Mod. Tunn. Technol. 2020, 57, 129–138. [Google Scholar]
- Cai, S.; Li, E.; Chen, L.; Gao, L.; Pu, S.; Duan, J.; Tan, Y. Research on the temporal prediction of tunnel surrounding rock deformation based on FA-NAR dynamic neural network. J. Rock Mech. Eng. 2019, 38, 3346–3353. [Google Scholar]
- Pachamanov, A.; Pachamanova, D. Optimization of the light distribution of luminaries for tunnel and street lighting. Eng. Optim. 2018, 40, 47–65. [Google Scholar] [CrossRef]
- Ministry of Transport of the People’s Republic of China. Detailed Rules for Highway Tunnel Lighting; JTG/T D702-01-2014; Ministry Transport of the People’s Republic of China: Beijing, China, 2014; Volume 15.
- Carnì, D.L.; Grimaldi, D.; Lamonaca, F.; Martirano, L.; Parise, G. A smart control to operate the lighting system in the road tunnels. In Proceedings of the 2013 IEEE 7th International Conference on Intelligent Data Acquisition and Advanced Computing Systems, Berlin, Germany, 12–14 September 2013; pp. 786–790. [Google Scholar]
- Codeca, L.; Frank, R.; Engel, T. Luxembourg SUMO traffic (LuST) scenario: 24 hours of mobility for vehicular networking research. In Proceedings of the 2015 IEEE Vehicular Networking Conference (VNC), Kyoto, Japan, 16–18 December 2015; pp. 1–8. [Google Scholar]
- Codeca, L.; Frank, R.; Faye, S.; Engel, T. Luxembourg SUMO traffic (LuST) scenario: Traffic demand evaluation. IEEE Intell. Transp. Syst. Mag. 2017, 9, 52–63. [Google Scholar] [CrossRef]
- Fryc, I.; Czyżewski, D.; Fan, J.; Gălăţanu, C.D. The drive towards optimization of road lighting energy consumption based on mesopic vision—A case study of suburban street. Energies 2021, 14, 1175. [Google Scholar] [CrossRef]
- Miki, M.; Hiroyasu, T.; Imazato, K. Proposal for an intelligent lighting system and verification of control method effectiveness. Digit. Object Identifier 2004, 12, 520–525. [Google Scholar]
- Musa, M.S.; Nallagownden, P.; Chiu, K.W.; Sarwar, M.B. Design and development of intelligent adaptive tunnel lighting system. In Proceedings of the 2015 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 19–20 October 2015; pp. 289–292. [Google Scholar]
- Wagiman, K.; Abdullah, M.; Hassan, M.; Hanssan, M.Y.; Radzi, N.H.M. Lighting system control techniques in commercial buildings: Current trends and future directions. J. Build. Eng. 2020, 19, 101342. [Google Scholar] [CrossRef]
- Witold, P. Logic-based neurons: Extensions, uncertainty representation and development of fuzzy controllers. Fuzzy Sets Syst. 1994, 66, 251–266. [Google Scholar]
- Moretti, L.; Cantisani, G.; Di Mascio, P. Management of road tunnels: Construction, maintenance and lighting costs. Tunn. Undergr. Space Technol. Inc. Trenchless Technol. Res. 2016, 51, 84–89. [Google Scholar] [CrossRef]
- Hamdar, S.H.; Qin, L.; Talebpour, A. Weather and roadgeometry impact on longitudinal driving behavior: Exploratory analysis using an empirically supported acceleration modeling framework. Transp. Res. Part C Emerg. Technol. 2019, 67, 193–213. [Google Scholar] [CrossRef] [Green Version]
- Brimley, B.K.; Carlson, P.J. The Current State of Research on the Long-Term Deterioration of Traffic Signs; TRB: Washington, DC, USA, 2018. [Google Scholar]
- Houtebbos, M.; Winter, J.C.F.; Hale, A.R.; Wieringa, P.A.; Hagenzieker, M.P. Concurrent audio—visual feedback for supporting drivers at intersections: A study using two linked driving simulators. Appl. Ergon. 2017, 60, 30–42. [Google Scholar] [CrossRef] [Green Version]
- HMSO. Highway Structures Design. In Design Manual for Roads and Bridges (DMRB); Section 2, Special Structures, Part 9, Design of Road Tunnels, BD 78/99; HMSO: London, UK, 2017; Volume 2. [Google Scholar]
- Diamantidis, D.; Zuccarelli, F.; Westhauser, A. Safety of long railway tunnels. Reliab. Eng. Syst. Saf. 2018, 67, 135–145. [Google Scholar] [CrossRef]
- Stichting Wetenschappelijk Onderzoek Verkeersveiligheid (SWOV). SWOV Fact Sheet: The Road Safety of Motorway Tunnels, Leidschendam Voeltzel A, A Comparative Analysis of the Mont Blanc, Tauern and Gotthard Tunnel Fires; Routes/Roads 324; PIARC: Paris, France, 2018. [Google Scholar]
- Yu, Y.-H. The advanced quality & safety management experiences of tunnel construction in SWITZERLAND and advices to quality & safety management of tunnel construction. North. Traffic 2010, 160–162. Available online: http://www.cqvip.com/qk/97829a/201004/33565540.html (accessed on 18 November 2022).
- Amundsen, F.H.; Roald, P.O.; Engebretsen, A.; Ragnoy, A. Traffic Accidents in Norwegian Subsea Tunnels; Report TTS; Norwegian Public Roads Administration: Oslo, Norway, 2018.
- Piarc Technical Committee on Road Tunnels Operation. Road Tunnels: Vehicle Emissions and Air Demand for Ventilation; PIARC: Paris, France, 2004. [Google Scholar]
- Vashitz, D.G.; Shinar, Y.B. In-vehicle information systems to improve traffic safety in road tunnels. Transp. Res. Part F 2008, 11, 61–74. [Google Scholar] [CrossRef]
- Arends, B.; Jonkman, S. Evaluation of tunnel safety towards an economic safety optimum. Reliab. Eng. Syst. Saf. 2005, 90, 217–228. [Google Scholar] [CrossRef]
- Pardo, P.J.; Cordero, E.M. Influence of the correlated color temperature of a light source on the color discrimina-tion capacity of the observer. Opt. Soc. Am. 2012, 29, 209–215. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lamp Arrangement Method | Single-Side Lamp Spacing/m | Single Lamp Luminous Flux/lm |
|---|---|---|
| Midline | 10 | 9000 |
| Lateralized midline | 10 | 9000 |
| Staggered on both sides | 20 | 9000 |
| bilateral symmetry | 10 | 4500 |
| Factors | Lamp Placement Method | Sidewall Reflective Coating Laying Height/m | Sidewall Reflective Paint Color | LED Light Source Color Temperature/K | |
|---|---|---|---|---|---|
| Level | |||||
| 1 | Midline | 2 | Yellow | 3500 | |
| 2 | Lateralized midline | 2.5 | White | 4500 | |
| 3 | Staggered on both sides | 3 | Blue | 5500 | |
| 4 | bilateral symmetry | 3.5 | Green | 6500 | |
| Factors | A | B | C | D | E | |
|---|---|---|---|---|---|---|
| Work Conditions | ||||||
| 1 | Midline | 2 | Yellow | 3500 | 1 | |
| 2 | Midline | 2.5 | White | 4500 | 2 | |
| 3 | Midline | 3 | Blue | 5500 | 3 | |
| 4 | Midline | 3.5 | Green | 6500 | 4 | |
| 5 | Lateralized midline | 2 | White | 5500 | 4 | |
| 6 | Lateralized midline | 2.5 | Yellow | 6500 | 3 | |
| 7 | Lateralized midline | 3 | Green | 3500 | 2 | |
| 8 | Lateralized midline | 3.5 | Blue | 4500 | 1 | |
| 9 | Staggered on both sides | 2 | Blue | 6500 | 2 | |
| 10 | Staggered on both sides | 2.5 | Green | 5500 | 1 | |
| 11 | Staggered on both sides | 3 | Yellow | 4500 | 4 | |
| 12 | Staggered on both sides | 3.5 | White | 3500 | 3 | |
| 13 | bilateral symmetry | 2 | Green | 4500 | 3 | |
| 14 | bilateral symmetry | 2.5 | Blue | 3500 | 4 | |
| 15 | bilateral symmetry | 3 | White | 6500 | 1 | |
| 16 | bilateral symmetry | 3.5 | Yellow | 5500 | 2 | |
| Projects | Length/m | Lamp Model | Layout | Single-Side Lamp Spacing |
|---|---|---|---|---|
| Entrance section | 40 | 180 W LED | Staggered on both sides | 2.5 |
| Export section | 40 | 180 W LED | Staggered on both sides | 5 |
| Layout Mode | Single-Side Lamp Spacing/m | Single Lamp Luminous Flux/lm | Quantity/Lamp |
|---|---|---|---|
| Midline | 10 | 9000 | 40 |
| Lateralized midline | 10 | 9000 | 40 |
| Staggered on both sides | 20 | 9000 | 40 |
| bilateral symmetry | 10 | 4500 | 80 |
| Grouping Number | Average Age | Total Number of People | Number of Men | Number of Women | Vision Correction |
|---|---|---|---|---|---|
| I | 25.2 | 10 | 7 | 3 | 5.0 |
| II | 26..1 | 10 | 7 | 3 | 5.0 |
| III | 24.8 | 10 | 7 | 3 | 5.0 |
| Average Pupil Diameter (mm) | I | II | III | Average of Three Groups | |
|---|---|---|---|---|---|
| Condition No. | |||||
| 1 | 5.089 | 5.270 | 5.206 | 5.188 | |
| 2 | 4.996 | 4.906 | 4.861 | 4.921 | |
| 3 | 5.402 | 5.340 | 5.378 | 5.373 | |
| 4 | 5.537 | 5.557 | 5.747 | 5.614 | |
| 5 | 5.285 | 5.341 | 5.378 | 5.335 | |
| 6 | 5.650 | 5.595 | 5.682 | 5.642 | |
| 7 | 5.591 | 5.568 | 5.657 | 5.605 | |
| 8 | 5.302 | 5.451 | 5.480 | 5.411 | |
| 9 | 5.624 | 5.708 | 5.692 | 5.675 | |
| 10 | 5.543 | 5.895 | 5.888 | 5.776 | |
| 11 | 5.602 | 5.895 | 5.904 | 5.801 | |
| 12 | 5.774 | 5.734 | 5.725 | 5.744 | |
| 13 | 5.733 | 5.715 | 5.698 | 5.715 | |
| 14 | 5.678 | 5.840 | 5.818 | 5.779 | |
| 15 | 5.820 | 5.837 | 5.900 | 5.852 | |
| 16 | 5.463 | 5.376 | 5.504 | 5.448 | |
| Lamp Placement Method | Midline Symmetry | Staggered on Both Sides | Lateralized Midline | Bilateral Symmetry |
|---|---|---|---|---|
| Pupil diameter (mean)/mm | 4.849 | 5.729 | 5.118 | 5.328 |
| Sidewall Reflective Coating Laying Height | 2 m | 2.5 m | 3 m | 3.5 m |
|---|---|---|---|---|
| Pupil Diameter (Mean)/mm | 4.873 | 5.011 | 5.981 | 5.673 |
| Sidewall Reflective Paint Color | Green | Blue | Yellow | White |
|---|---|---|---|---|
| Pupil Diameter (mean)/mm | 5.631 | 5.489 | 5.118 | 4.973 |
| LED Light Source Color Temperature | 6500 K | 5500 K | 4500 K | 3500 K |
|---|---|---|---|---|
| Pupil Diameter (Mean)/mm | 5.846 | 5.426 | 5.233 | 5.649 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, B.; Xu, M.; Li, Z.; Niu, J. Sensitivity Study of Highway Tunnel Light Environment Parameters Based on Pupil Change Experiments and CNN Judging Method. Appl. Sci. 2023, 13, 3160. https://doi.org/10.3390/app13053160
Liang B, Xu M, Li Z, Niu J. Sensitivity Study of Highway Tunnel Light Environment Parameters Based on Pupil Change Experiments and CNN Judging Method. Applied Sciences. 2023; 13(5):3160. https://doi.org/10.3390/app13053160
Chicago/Turabian StyleLiang, Bo, Mengdie Xu, Zhiting Li, and Jia’an Niu. 2023. "Sensitivity Study of Highway Tunnel Light Environment Parameters Based on Pupil Change Experiments and CNN Judging Method" Applied Sciences 13, no. 5: 3160. https://doi.org/10.3390/app13053160