
A Multi-Branch Training and Parameter-Reconstructed Neural Network for Assessment of Signal-to-Noise Ratio of Optical Remote Sensor on Orbit

Abstract
:1. Introduction
- Complicated and low efficiency [8]: Traditional SNR algorithms depend on complicated physical or mathematical models to analyze textured and structural information. The complicated analytical and time-consuming computational methods are programmed, including methods such as multiple linear regression, covariance matrices, and Fourier transforms, etc.
- General accuracy: Most of the methods are affected by the uneven distribution and complicated textures of ground surfaces. For example, Ref. [8] highly depends on whether edges can be removed. Additionally, Ref. [11] is applied in hyperspectral images but hardly works for multi-specworks and panchromatic images.
- Lack of intelligent algorithms: Intelligent satellites need intelligent algorithms. However, most intelligent algorithms are mainly used in denoising research such as [15], etc. The denoising algorithms aim to improve image quality (restoring textures, refining details, and improving contrast). Thus, the noise residuals between the original and the restored images contain part of structural information of ground objects or part of the noise information [21], which causes the biased errors of noise estimation. At present, few neural networks are used to estimate noise levels in real-life applications.
- The proposed CNN provides an intelligent method to estimate SNR directly. It is suitable for distributed deployment on intelligent satellites, which is a prominence compared with traditional methods.
- The novel training method activates neural networks similar to VGG. This method performs more accurately than those trained by the traditional method. It makes networks similar to VGG have the ability of multi-branch inference.
- Our aim is to correctly evaluate the SNRs of optical remote sensors on orbit. The specific objectives of this study are to: (1) design a lightweight CNN to estimate SNR directly; (2) propose a novel train-inference method to enhance the capabilities of lightweight CNNs; and (3) validate this model.
2. Materials
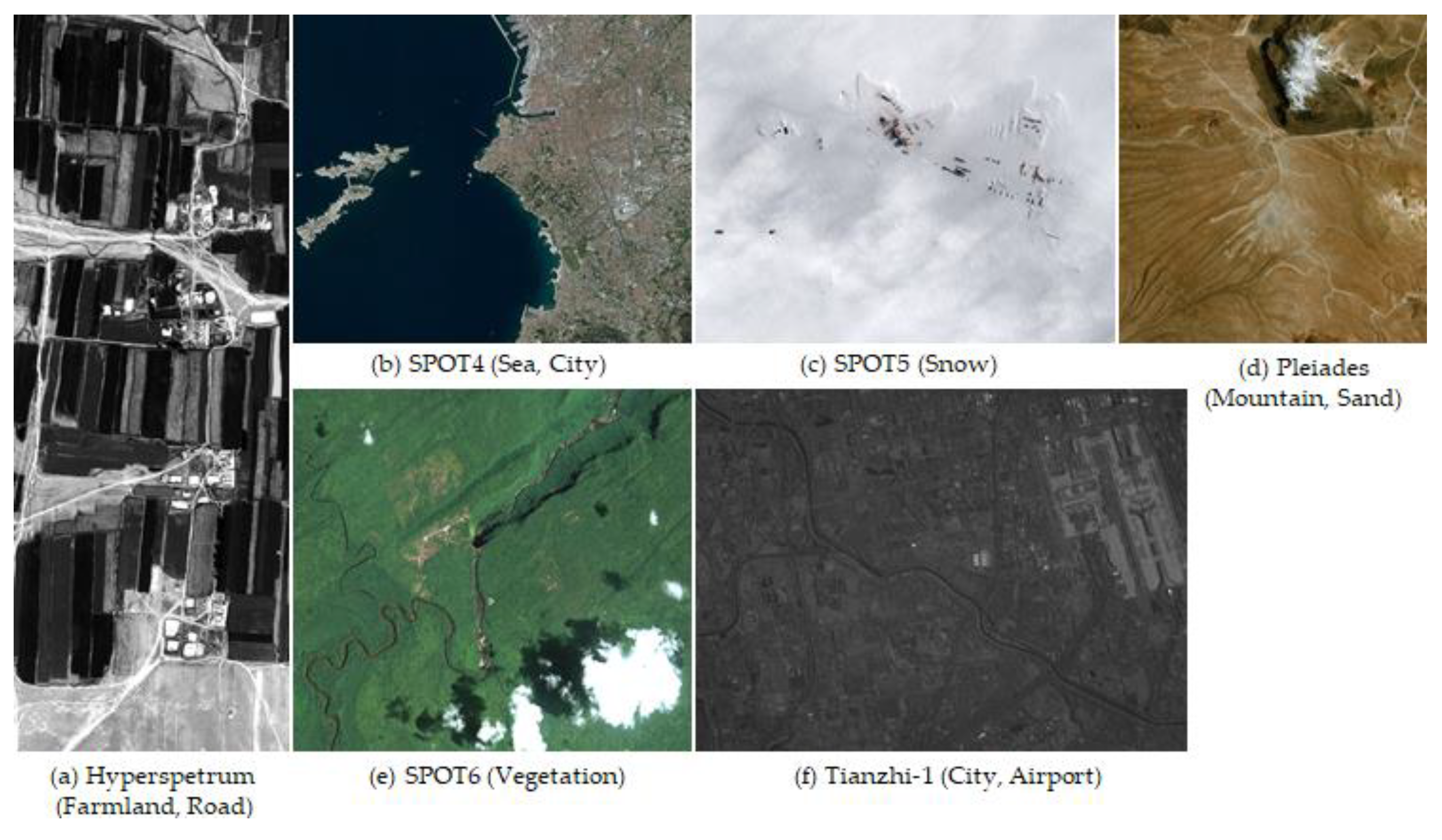
2.1. The Dataset
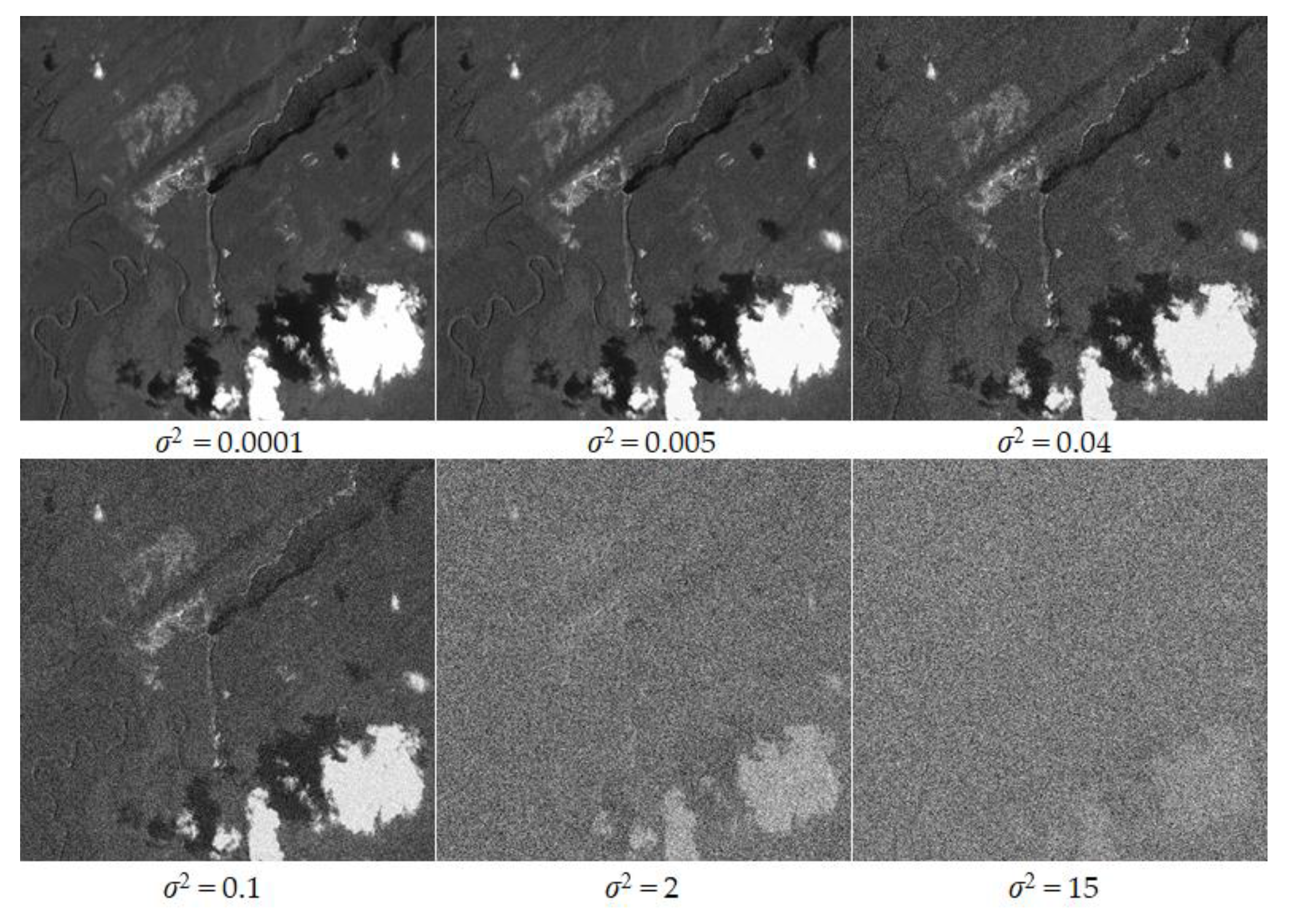
2.2. Experiment Introduction
3. The Proposed Method
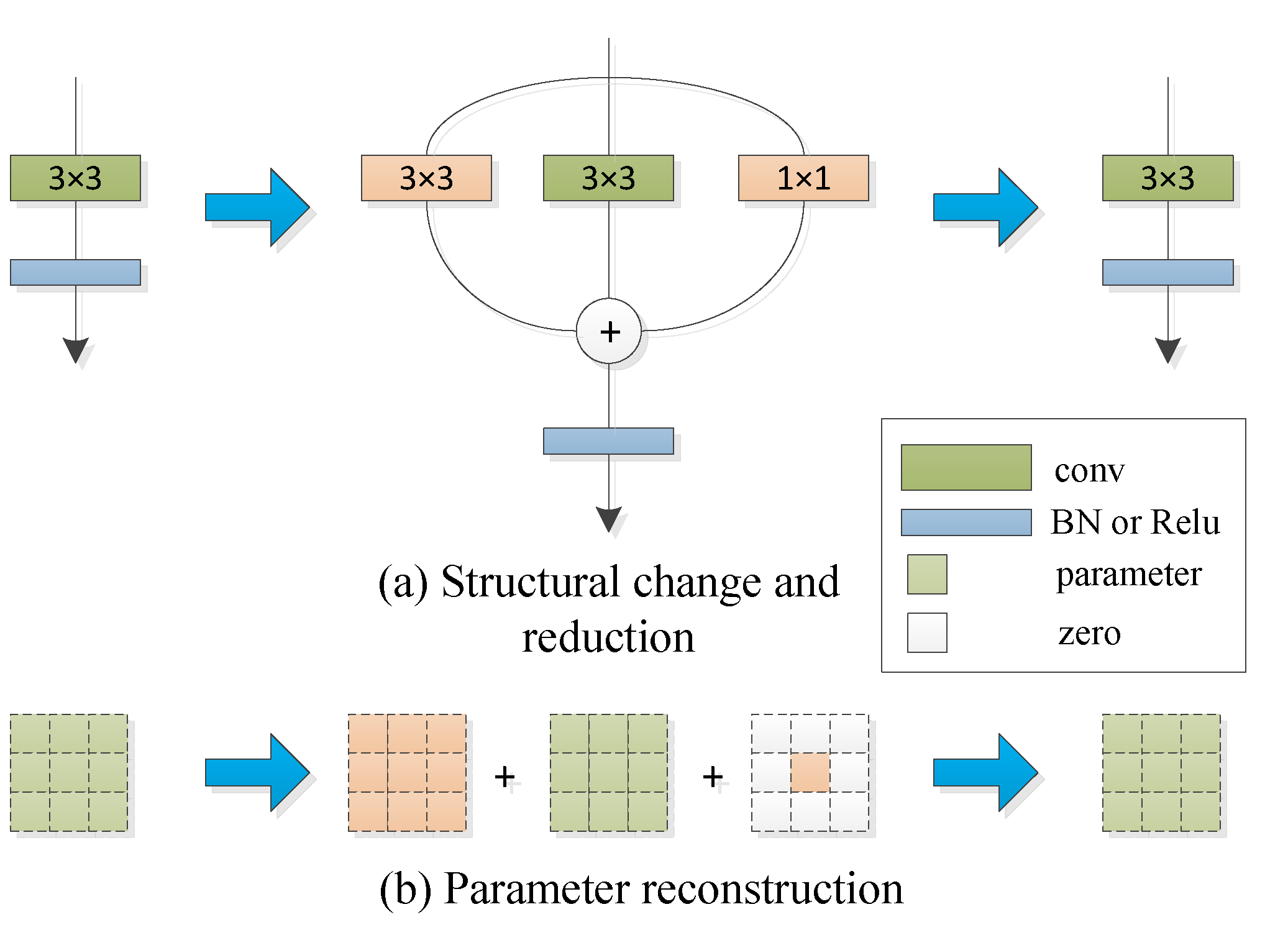
3.1. Multi-Branch Training and Parameter Reconstruction
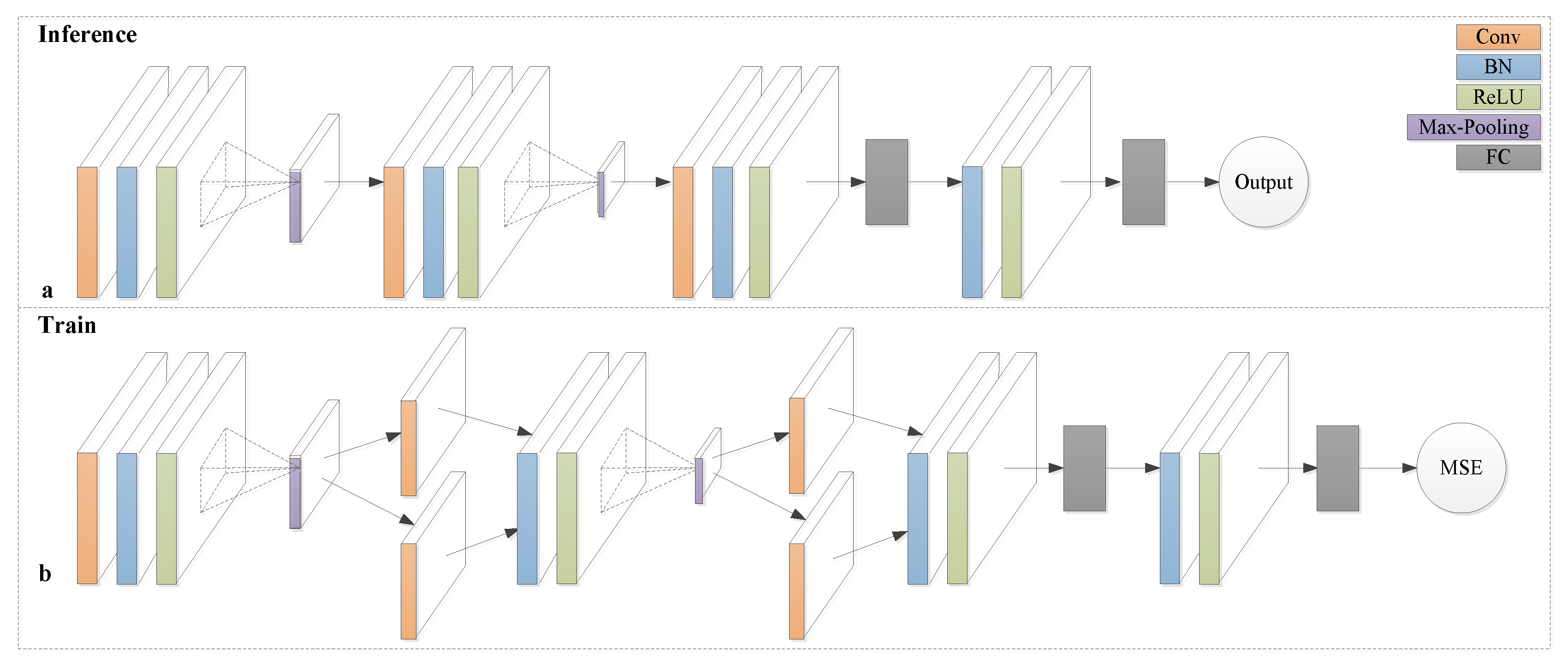
3.2. SNR Neural Network
4. Results and Analysis
4.1. Comparison of Training Results Based on Neural Network
4.2. Accuracy Validation with Known Noise Levels
4.3. SNR Estimation on Blind Imagery
5. Discussion
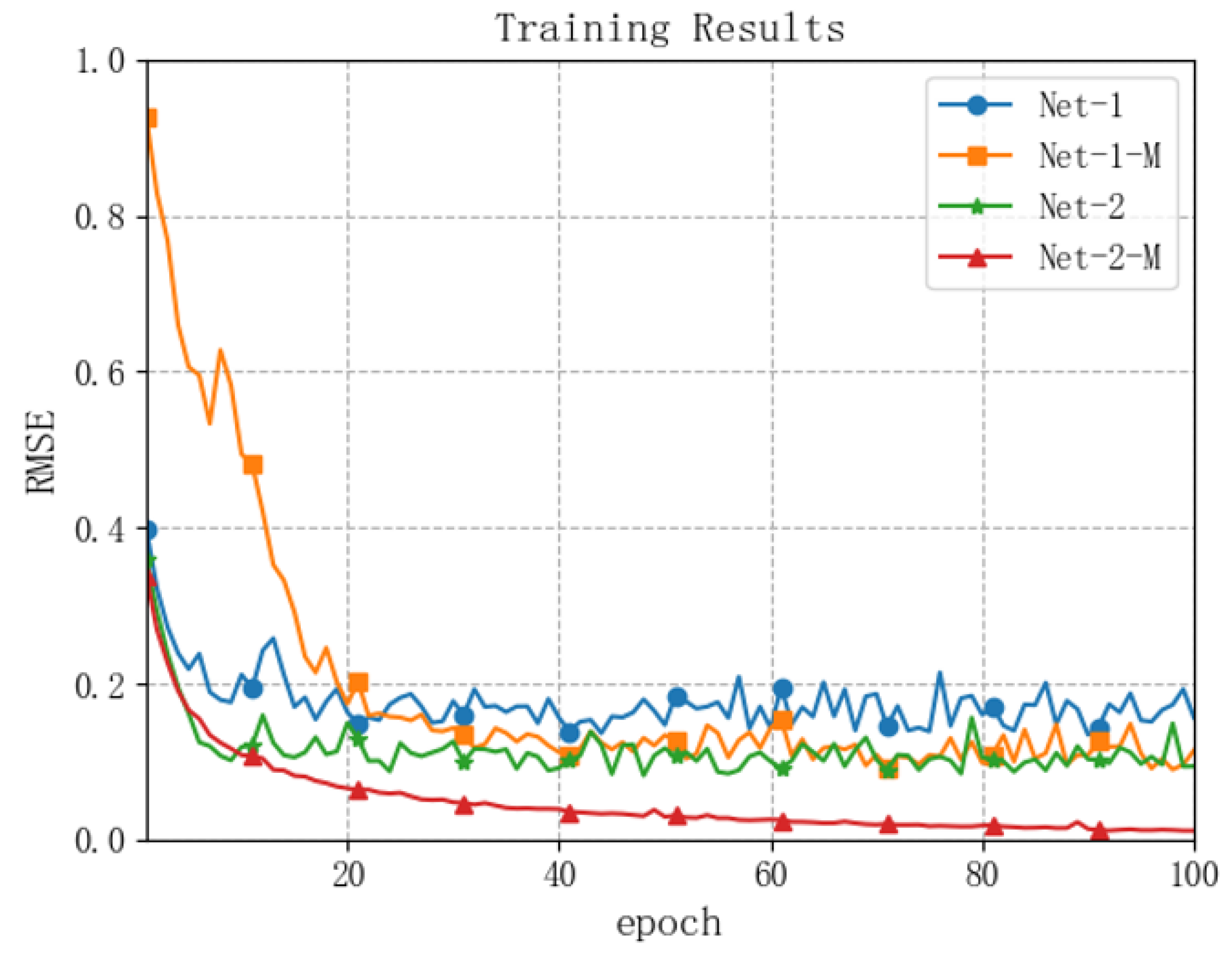
- In this study, [20] and the proposed models (Net-1 and Net-2 in Figure 4) are compared. The two CNNs are trained in the traditional method. Net-2 has one more FC layer and one more BN layer than Net-1. When comparing the results of the two CNNs on the dataset, the deeper network (Net-2) performs better. Regardless of the gradient vanishing, the appropriate deepening of a neural network would extract more abstract and useful feature information [34,35]. The useful information transmitting could reduce the redundant and interfering information to a certain degree.
- In the comparative experiment, there is another analyzable test: a comparison between traditional training and multi-branch training. Figure 4 shows that the multi-branch training method is more accurate than the traditional training method. The reasons are: (a) multiple branches extract more useful features than one branch and achieve the effect of a deeper network; and (b) during the backward propagation, the upstream gradients are passed to each branch, and the gradient attenuation of each branch is the same. It accelerates the gradient updating and makes the whole training process converge quickly, which reduces the training time. For example, the training epochs of Net-1-M are less than Net-1, but the average RMSE obtained by Net-1-M is minimal; the RMSE obtained by Net-1-M is close to Net-2, but Net-1-M has less layers than Net-2.
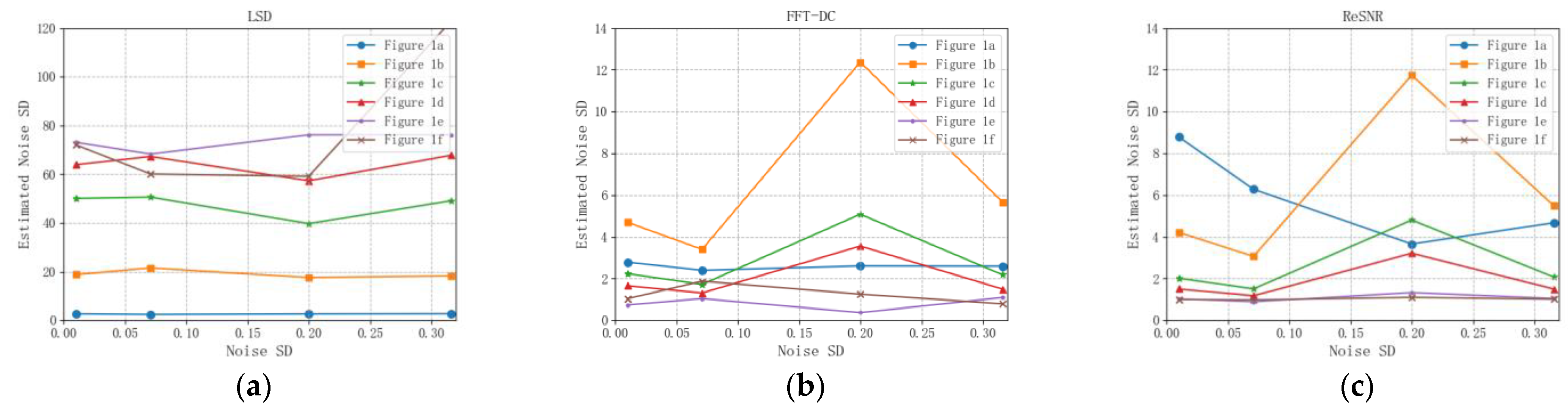
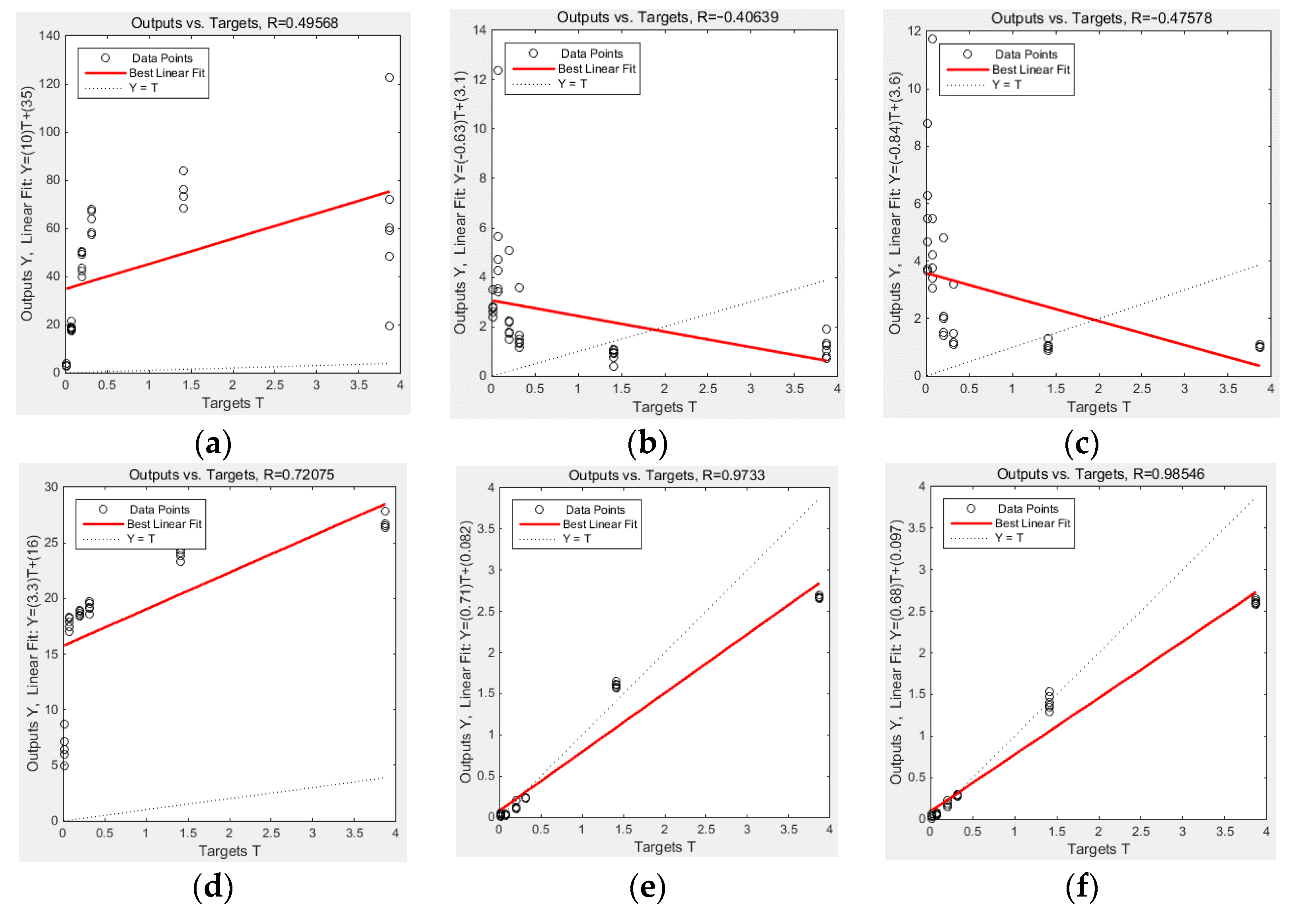
- For the accuracy tested on the noise-known images, five methods are used as reference methods. The dataset contains different scenes such as farmland, roads, city, sea, mountain and vegetation, etc. When compared with each method, the proposed method is still better than others. The traditional methods are limited by heterogeneous or complicated land surfaces [9,12]. For the denoising DnCNN, the residual noise tends to contain part of the image structure information, which causes the high error of noise estimation (shown in Figure 7). Unlike denoising DnCNN, our model learned the feature of Gaussian noise rather than the ground features. For different land surfaces, our model still performed well.
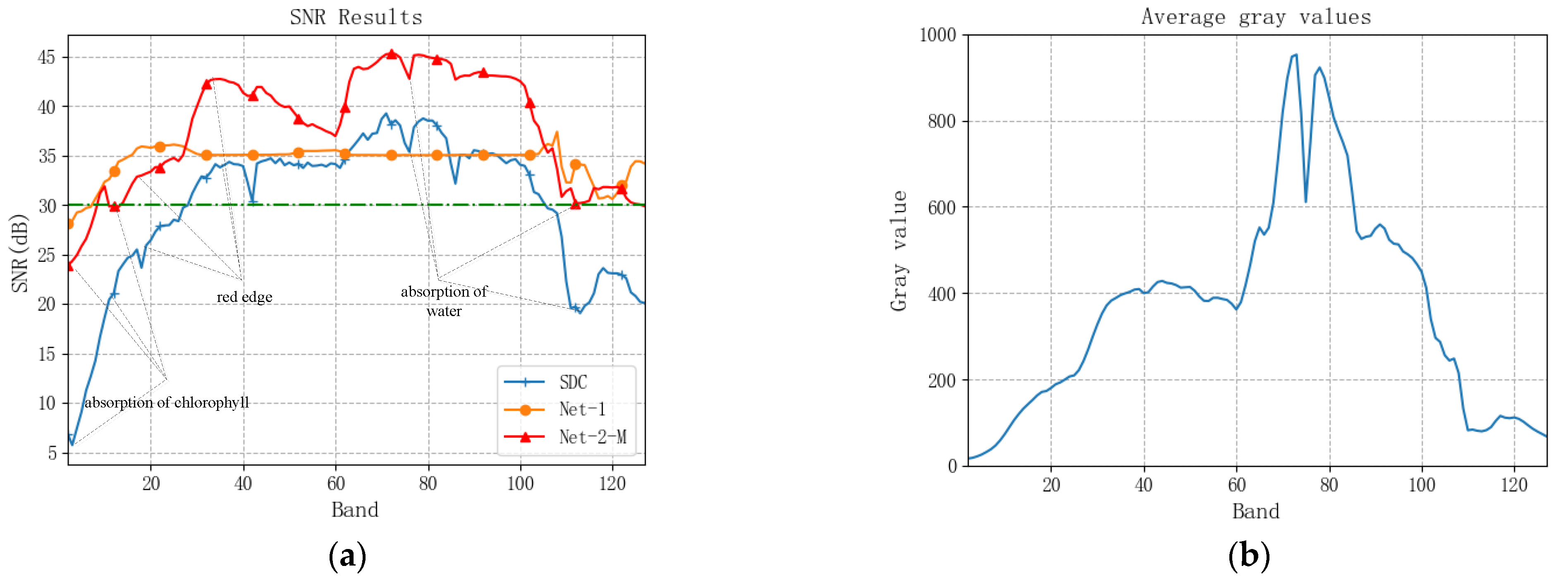
- In the test on blind imagery, three methods (SDC, Net-1, and Net-2-M) are used to estimate SNR on real hyperspectral imagery with 128 bands captured by a UAV flight. The SNRs of the remote sensor are calibrated in the laboratory before aerial photography: 40 dB on average for 128 bands. Compared with the calibrated SNRs, the Net-1 and Net-2-M are more accurate than SDC, which is restricted to the complicated ground features. For optical remote sensors, thermal noise hardly changes with signals [36] under stable conditions. In other words, thermal noise is affected by temperature changing and hardly affected by spectrum frequency. Then, at the absorption or reflection bands, the SNRs are lower or higher than those adjacent bands. In this case, the SNR curve obtained by Net-2-M is consistent with the specific spectral response compared with the other two methods.
- The performance is not ideal for the proposed method in this case as the noise intensity increases, and the RMSE also increases (shown in Table 4). The reasons for this are: (a) the noise intensity is close to the signal, which causes serious image degradation. Thus, it is hard to distinguish signal and noise; and (b) the cases that do not meet the mapping relationship are not effectively excluded in the inference process. However, the traditional methods consider the cases by eliminating non-homogeneous information. To solve the problems, we can consider two aspects in the follow-up research: (a) analyze the uniformity of the input image block before inference; and (b) eliminate the image blocks in which data exceeds the mapping relationship.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shao, L.; Yan, R.; Li, X.; Liu, Y. From heuristic optimization to dictionary learning: A review and comprehensive comparison of image denoising algorithms. IEEE Trans. Cybern. 2013, 44, 1001–1013. [Google Scholar] [CrossRef]
- Xu, X.J.; Tang, L.; Kuang, N.L.; Liu, Y.Y. An image noise reduction and haze removal algorithm based on multi-frame merge. Microelectron. Comput. 2021, 9, 21708–21720. [Google Scholar]
- Khmag, A.; Ramli, A.R.; AI-Haddad, S.A.R.; Kamarudin, N. Natural image noise level estimation based on local statistics for blind noise reduction. Vis. Comput. 2018, 34, 575–587. [Google Scholar] [CrossRef]
- Curran, P.J.; Dungan, J.L. Estimation of signal-to-noise: A new procedure applied to AVIRIS data. IEEE Trans. Geosci. Remote Sens. 1989, 27, 620–628. [Google Scholar] [CrossRef]
- Eklundh, L.R. Noise Estimation in NOAA AVHRR Maximum-value Composite NDVI Images. Int. J. Remote Sens. 1995, 16, 2955–2962. [Google Scholar] [CrossRef]
- Chen, G.Y.; Zhu, F.Y.; Heng, P.A. An Efficient Statistical Method for Image Noise Level Estimation. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 13–16 December 2015. [Google Scholar]
- Gao, B.C. An Operational method for Estimating Signal to Noise Ratios from Data Acquired with Imaging Spectrometers. Remote Sens. Environ. 1993, 43, 23–33. [Google Scholar] [CrossRef]
- Gao, L.R.; Zhang, B.; Zhang, X.; Shen, Q. Study on the Method for Estimating the Noise in Remote Sensing Images Based on Local Standard Deviations. Int. J. Remote Sens. 2007, 11, 203–208. [Google Scholar]
- Zhu, B.; Wang, X.H.; Tang, L.L.; Li, C.R. Review on Methods for SNR Estimation of Optical Remote Sensing Imagery. Remote Sens. Technol. Appl. 2010, 25, 303–309. [Google Scholar]
- Fu, P.; Sun, Q.S.; Ji, Z.X. Noise Estimation from Remote Sensing Images by Fractal Theory and Adaptive Image Block Division. Acta Geod. Cartogr. Sin. 2015, 44, 1235–1245. [Google Scholar]
- Roger, R.E.; Arnold, J.F. Reliably Estimating the Noise in AVIRIS Hyper Spectral Images. Int. J. Remote Sens. 1996, 17, 1951–1962. [Google Scholar] [CrossRef]
- Zhu, B.; Wang, X.H.; Li, Z.Y.; Dou, S.; Tang, L.L.; Li, C.R. A New Method based on Spatial Dimension Correlation and Fast Fourier Transform for SNR Estimation in Remote Sensing Images. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2013), Melbourne, Australia, 21–26 July 2013. [Google Scholar]
- Zhu, B.; Li, C.R.; Wang, X.H.; Wang, C.L. A New Method to Estimate SNR of Remote Sensing Imagery. In Proceedings of the 2017 SPIE: Optical Sensing and Imaging Technology and Applications, Beijing, China, 4–6 June 2017. [Google Scholar]
- Zhang, K.; Zuo, W.M.; Chen, Y.J.; Meng, D.Y.; Zhang, L. Beyond a Gaussian Denoiser: Residual Learning of Deep CNN for Image Denoising. IEEE Trans. Image Process. 2017, 26, 3142–3155. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Pock, T. Trainable nonlinear reaction diffusion: A flexible framework for fast and effective image restoration. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1256–1272. [Google Scholar] [CrossRef] [Green Version]
- Yang, G.L. Research on Image Denoising Method Based on Convolutional Neural Network. Master’s Thesis, Nanchang University, Nanchang, China, 9 June 2020. [Google Scholar]
- Qin, Y.; Zhao, E.G. An Image Multi-Type Noise Removal Algorithm based on Lightweight Deep Residual Network. Comput. Appl. Softw. 2021, 38, 250–255. [Google Scholar]
- Delvit, J.M.; Leger, D.; Roques, S.; Valorge, C.; Viallefont-Robinet, F. Signal to Noise Assessment from Non Specific Views. In Proceedings of the Image and Signal Processing for Remote Sensing VII, Toulouse, France, 17–22 September 2001. [Google Scholar]
- Li, H.Z.; Tian, Y.; Han, C.Y.; Wu, G.D.; Ma, D.M. Assessment of signal-to-noise ratio of space optical remote sensor using artificial neural network. Opto-Electron. Eng. 2006, 33, 44–49. [Google Scholar]
- Yu, H.W.; Yi, X.W.; Xu, S.P.; Liu, T.Y.; Li, C.X. A fast noise level estimation algorithm based on convolution neural network. J. Nanchang Univ. 2019, 43, 497–503. [Google Scholar]
- Cui, G.M. Research on Image Quality Improvement and Assessment for Optical Remote Sensing Image. Ph.D. Thesis, Zhejiang University, Zhejiang, China, 16 June 2016. [Google Scholar]
- Sergey, I.; Christian, S. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted Boltzmann machine. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–25 June 2010. [Google Scholar]
- Huang, G.; Liu, Z.; Weinberger, K.Q.; Maaten, L.V.D. Densely Connected Convolutional Networks. arXiv 2018, arXiv:1608.06993v5. [Google Scholar]
- Kingma, D.P.; Ba, J.L. ADAM: A method for stochastic optimization. International Conference on Learning Representations (ICLR). arXiv 2017, arXiv:1412.6980v9. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.Q.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. arXiv 2014, arXiv:1409.4842v1. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large Scale Visual Recognition. arXiv 2015, arXiv:1409.1556v6. [Google Scholar]
- He, K.M.; Zhang, X.Y.; Ren, S.Q.; Sun, J. Deep Residual Learning for Image Recognition. arXiv 2016, arXiv:1512.03385v1. [Google Scholar]
- Saito, K.Y. Deep Learning from Scratch, 1st ed.; O’ Reilly Japan: Tokyo, Japan, 2016; pp. 240–242. ISBN 978-7-115-48558-8. [Google Scholar]
- Pre-Processing Product Levels for Spaceborne Hyperspectral Imaging Data; GB/T36301-2018. Standardization Administration of the People’s Republic of China: Beijing, China, 2019.
- Song, K.S.; Zhang, B.; Wang, Z.M.; Liu, H.J.; Duan, H.T. Inverse model for estimating soybean chlorophyll concentration using in-situ collected canopy hyperspectral data. Trans. CSAE 2006, 22, 16–21. [Google Scholar]
- Moran, J.N.; Mitchell, A.K.; Goodmanson, G.; Stockburger, K.A. Differentiation among effects of nitrogen fertilization treatments on conifer seedlings by foliar reflectance: A comparison of methods. Tree Physiol. 2000, 20, 1113–1120. [Google Scholar] [CrossRef] [Green Version]
- Qiao, X. The Primary Investigation in Diagnosing Nutrition Information of Crop Based on Hyperspectral Remote Sensing Technology. Master’s Thesis, Jilin University, Jilin, China, May 2005. [Google Scholar]
- Zeiler, M.D.; Fergus, R. Visualizing and Understanding Convolutional Networks. In Proceedings of the 13th European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Mahendran, A.; Vedaldi, A. Understanding deep image representations by inverting them. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Huang, S.J. Research on the Technology of Geosynchronous Orbit High Dynamic Range Information Acquisition. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, May 2015. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Sensor | Size (Pixel) | Frame | GSD (m) |
|---|---|---|---|---|
| Tianzhi-1 | pan | 2048 × 2560 | 10 | 6 |
| SPOT4 | pan/multi | 2048 × 2000 | 10 | 10/20 |
| SPOT5 | pan/multi | 2000 × 2000 | 6 | 2.5/10 |
| SPOT6 | pan/multi | 2500 × 2500 | 6 | 1.5/6 |
| Pleiades | multi | 3200 × 2500 | 8 | 2 |
| UAV | hyper | 2750 × 1030 | 1 | 2 |
| Original Data | Training Samples | Validating Samples | Testing Samples |
|---|---|---|---|
| Tianzhi-1 | 3840 | 2560 | 1280 |
| SPOT4 | 2976 | 1984 | 992 |
| SPOT5 | 2883 | 1922 | 961 |
| SPOT6 | 4563 | 3042 | 1521 |
| Pleiades | 5850 | 3180 | 1950 |
| UAV | 20,112 | 12,688 | 6704 |
| Params | Size | Strip | Count | Training | Inference |
|---|---|---|---|---|---|
| Conv 1 | 3 × 3 | 1 | 16 | √ | √ |
| BN | 16 × 32 × 32 | -- | -- | √ | √ |
| Conv 2 | 3 × 3 | 1 | 32 | √ | Conv 2,Conv 3integrated |
| Conv 3 | 3 × 3 | 1 | 32 | √ | |
| BN | 32 × 16 × 16 | -- | -- | √ | √ |
| Conv 4 | 3 × 3 | 1 | 64 | √ | Conv 4,Conv 5integrated |
| Conv 5 | 3 × 3 | 1 | 64 | √ | |
| BN | 64 × 8 × 8 | -- | -- | √ | √ |
| FC 1 | 64 × 8 × 8 × 2 | -- | -- | √ | √ |
| BN | 2 | -- | -- | √ | √ |
| FC 2 | 2 × 1 | -- | -- | √ | √ |
| Activation Function: ReLU | Params Updating: Adam | ||||
| Initialized Weight: He | Learning Rate: 0.0001 | ||||
| Input Size: 32 × 32 | Output: Noise SD | ||||
| Method | Noise Standard Deviation | |||||
| 0.01 | 0.07 | 0.2 | 0.316 | 1.41 | 3.87 | |
| LSD | 2.96 | 18.7 | 45.9 | 63 | 75.6 | 63.7 |
| FFT-DC | 2.77 | 5.66 | 2.41 | 1.76 | 1.04 | 1.17 |
| ReSNR | 5.43 | 5.28 | 2.23 | 1.61 | 0.86 | 1.01 |
| DnCNN 1 | 6.98 | 17.9 | 18.7 | 19.2 | 24.3 | 26.8 |
| Net-1 1 | 0.033 | 0.027 | 0.123 | 0.233 | 1.6 | 2.67 |
| Net-2-M 1 | 0.036 | 0.063 | 0.187 | 0.282 | 1.4 | 2.67 |
| Method | Root Mean Square Error (RMSE) | |||||
| LSD | 2.99 | 18.7 | 45.9 | 62.9 | 74.3 | 67.4 |
| FFT-DC | 2.78 | 6.39 | 2.53 | 1.66 | 0.61 | 2.7 |
| ReSNR | 5.7 | 6.0 | 2.35 | 1.49 | 0.4 | 2.86 |
| DnCNN 1 | 7.11 | 17.8 | 18.5 | 18.9 | 22.91 | 22.88 |
| Net-1 1 | 0.027 | 0.04 | 0.085 | 0.083 | 0.188 | 1.202 |
| Net-2-M 1 | 0.03 | 0.014 | 0.03 | 0.04 | 0.08 | 1.197 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, B.; Lv, X.; Tan, C.; Xia, Y.; Zhao, J. A Multi-Branch Training and Parameter-Reconstructed Neural Network for Assessment of Signal-to-Noise Ratio of Optical Remote Sensor on Orbit. Appl. Sci. 2023, 13, 2851. https://doi.org/10.3390/app13052851
Zhu B, Lv X, Tan C, Xia Y, Zhao J. A Multi-Branch Training and Parameter-Reconstructed Neural Network for Assessment of Signal-to-Noise Ratio of Optical Remote Sensor on Orbit. Applied Sciences. 2023; 13(5):2851. https://doi.org/10.3390/app13052851
Chicago/Turabian StyleZhu, Bo, Xiaoning Lv, Congao Tan, Yuli Xia, and Junsuo Zhao. 2023. "A Multi-Branch Training and Parameter-Reconstructed Neural Network for Assessment of Signal-to-Noise Ratio of Optical Remote Sensor on Orbit" Applied Sciences 13, no. 5: 2851. https://doi.org/10.3390/app13052851