
Research on the Path Planning of Unmanned Sweepers Based on a Fusion Algorithm

Abstract
:1. Introduction
- A new route-planning method by fusing improved A* and Open_Planner;
- Feature point search strategy for planning paths;
- Path smoothing strategy based on minimum snap.
2. Traditional A* Algorithm with Improvements
Principles of the Traditional A* Algorithm
3. Method
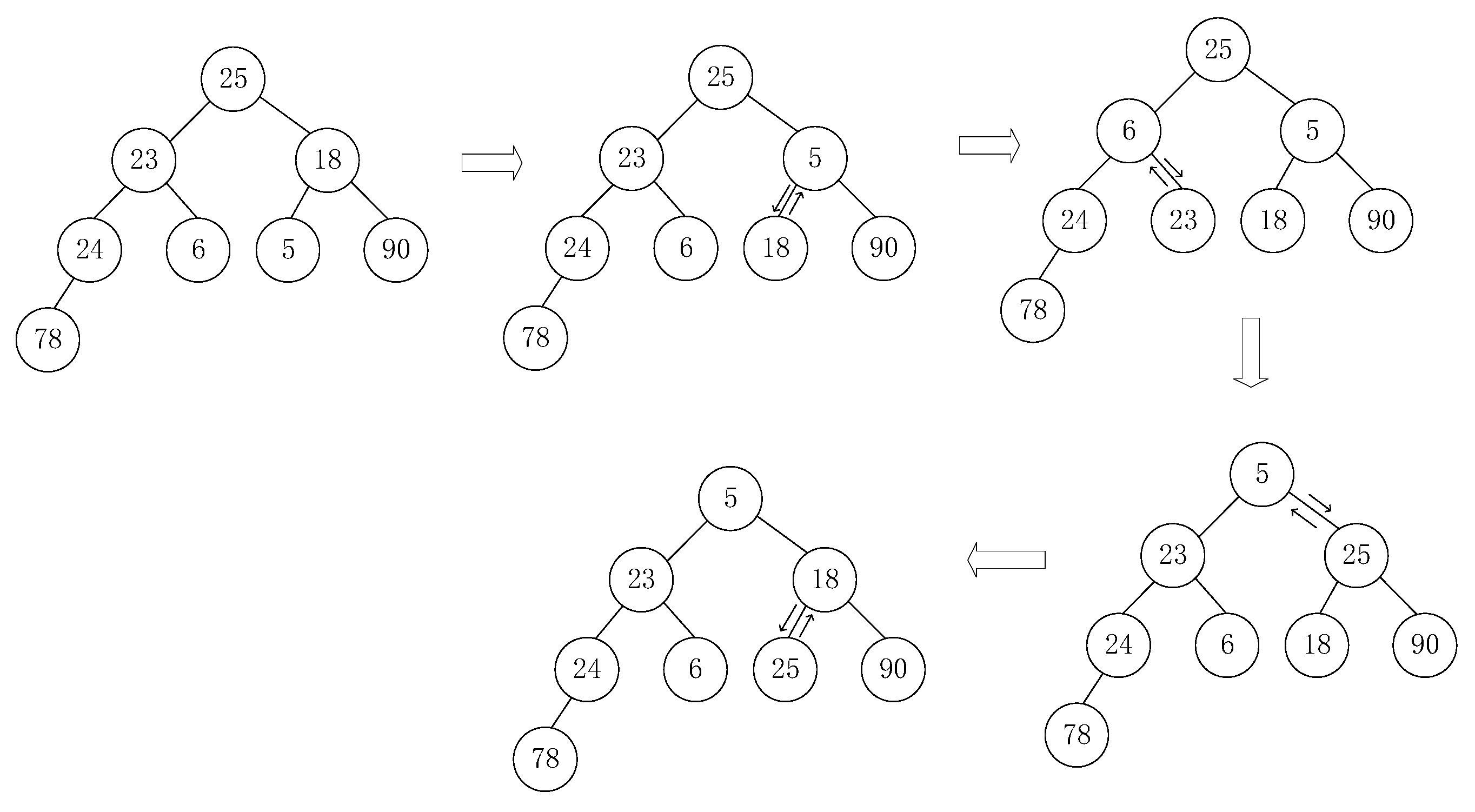
3.1. Optimized Node Data Structure Based on Binomial Heap
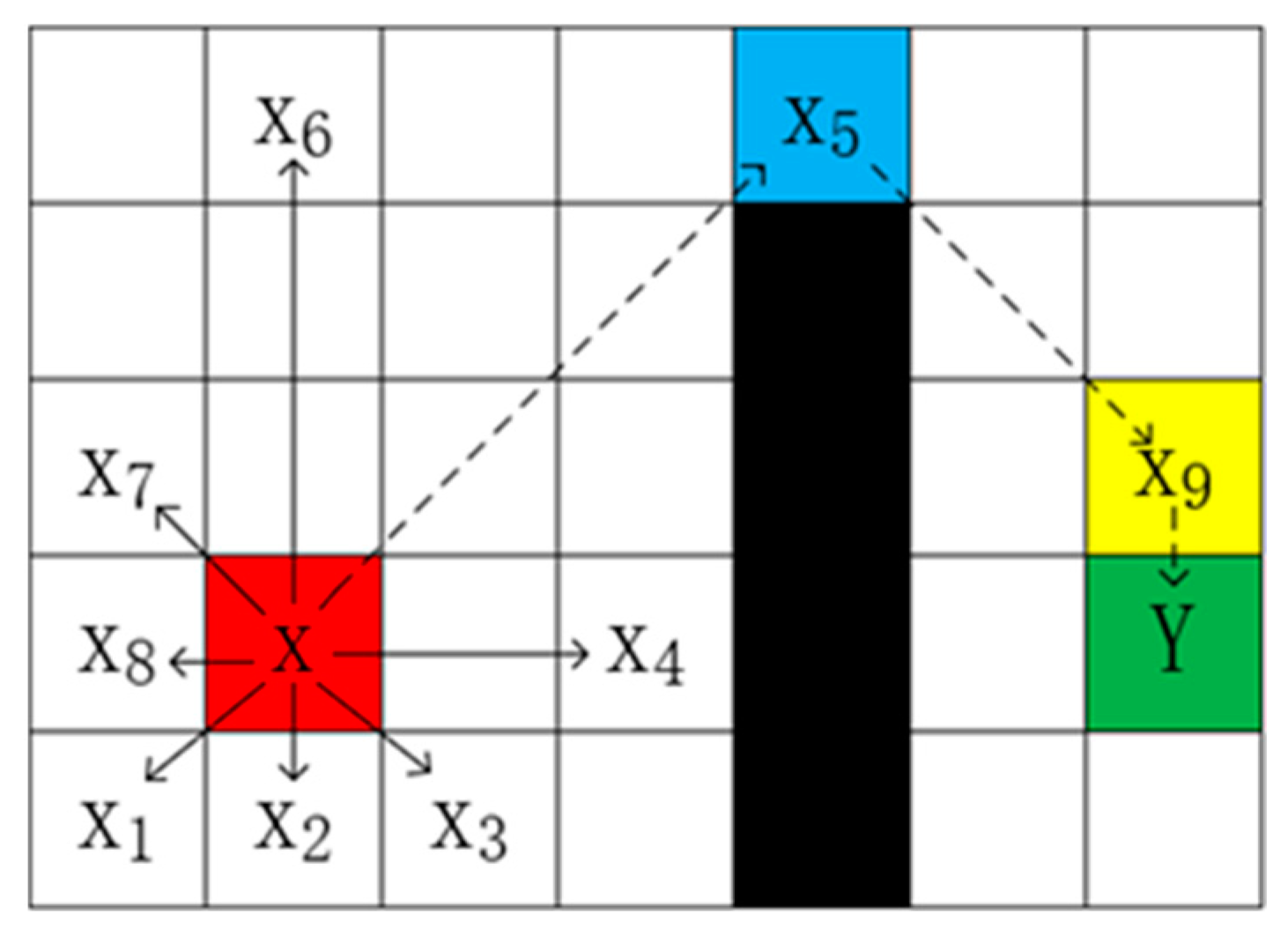
3.2. Extract Key Points Based on Raster Map Boundaries and Obstacles
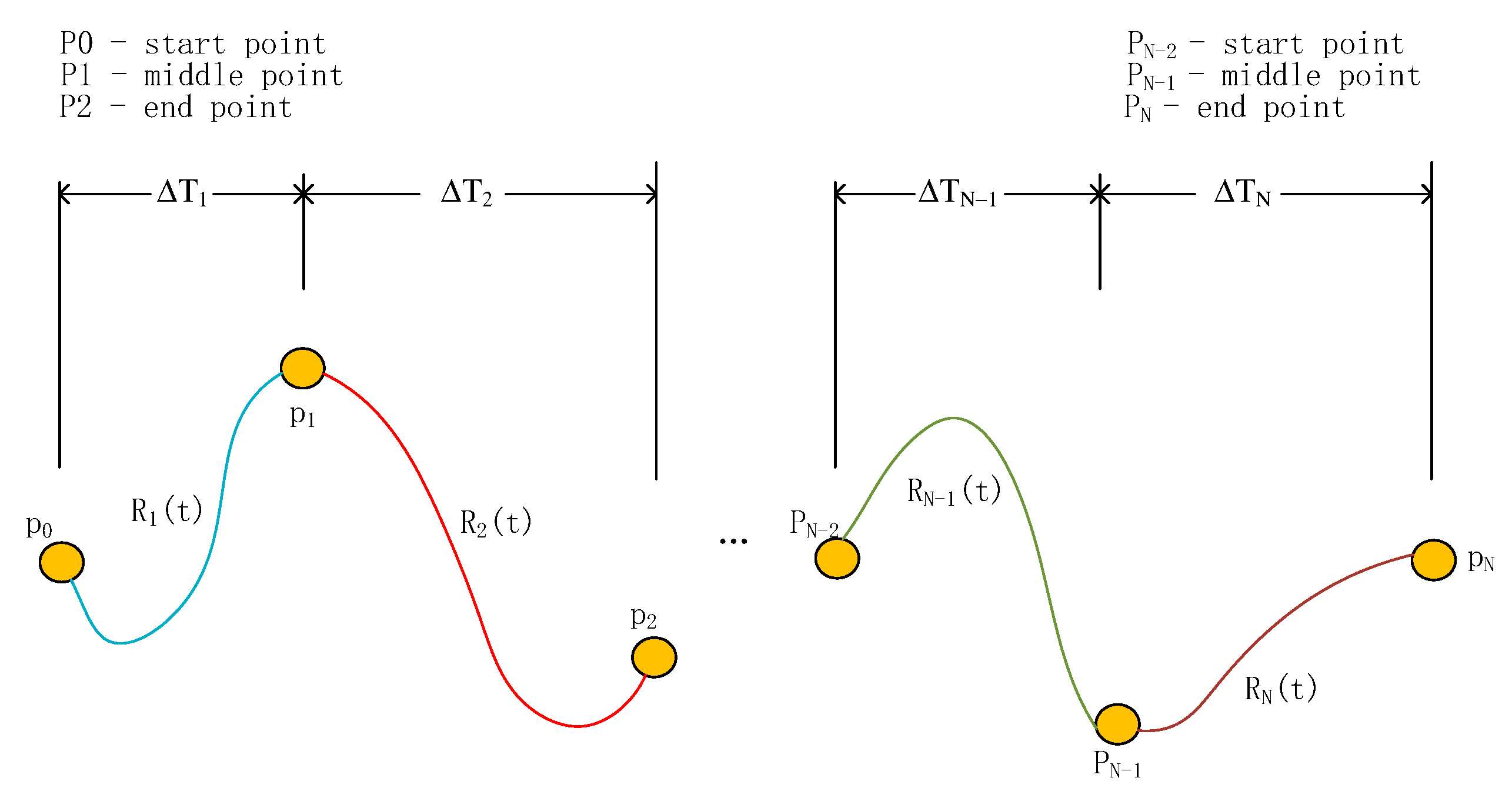
3.3. Path Smoothing Based on Minimum Snap
4. Open_Planner Algorithm
The Storage Structure of Nodes Is Optimized
5. Fusion Algorithm and Simulation Experiment
The Storage Structure of Nodes Is Optimized
6. Experimental Results
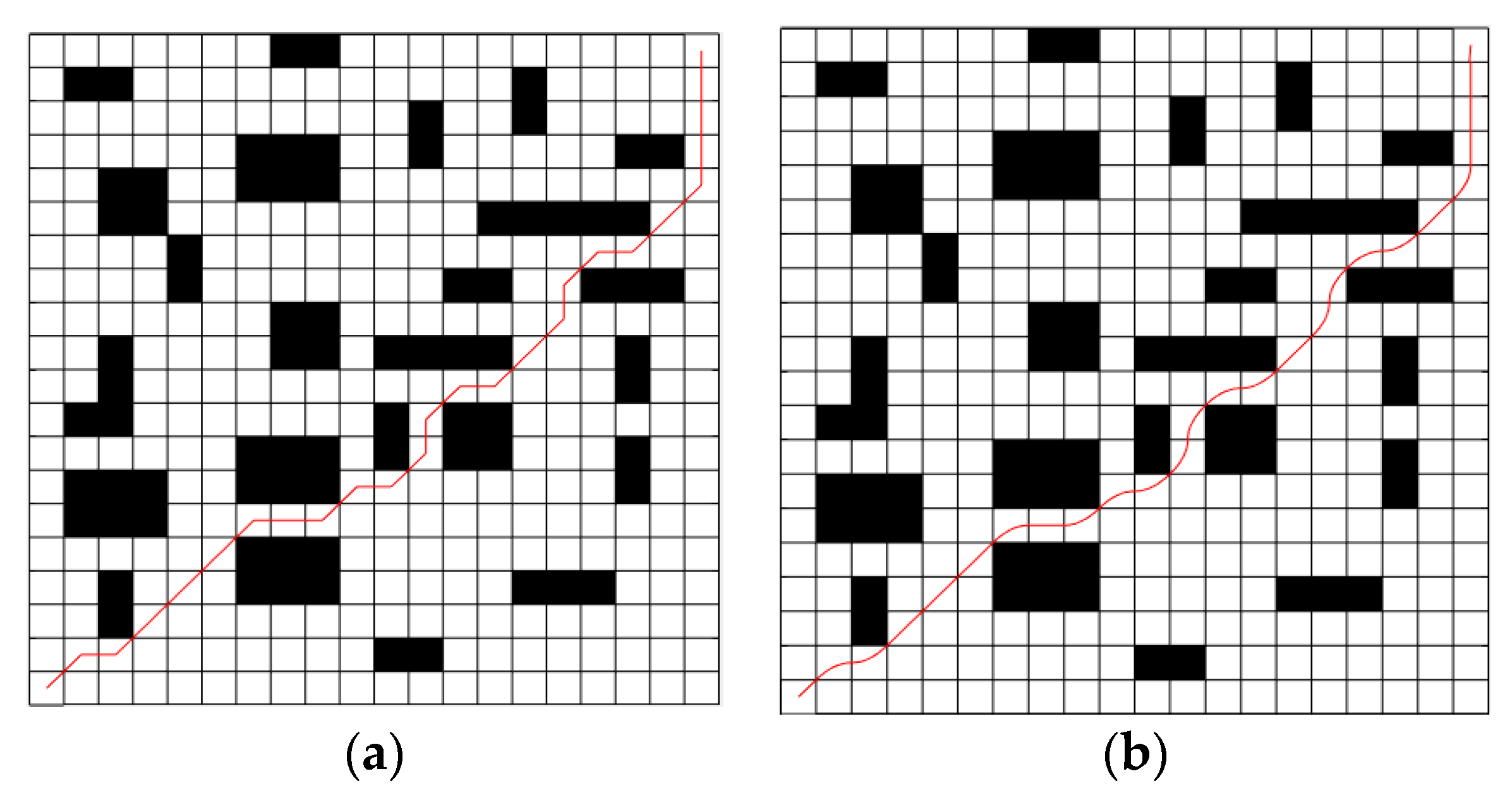
6.1. Simulation Experiment of Improved Algorithm Based on Key Points
6.2. Path-Smoothing Experiments
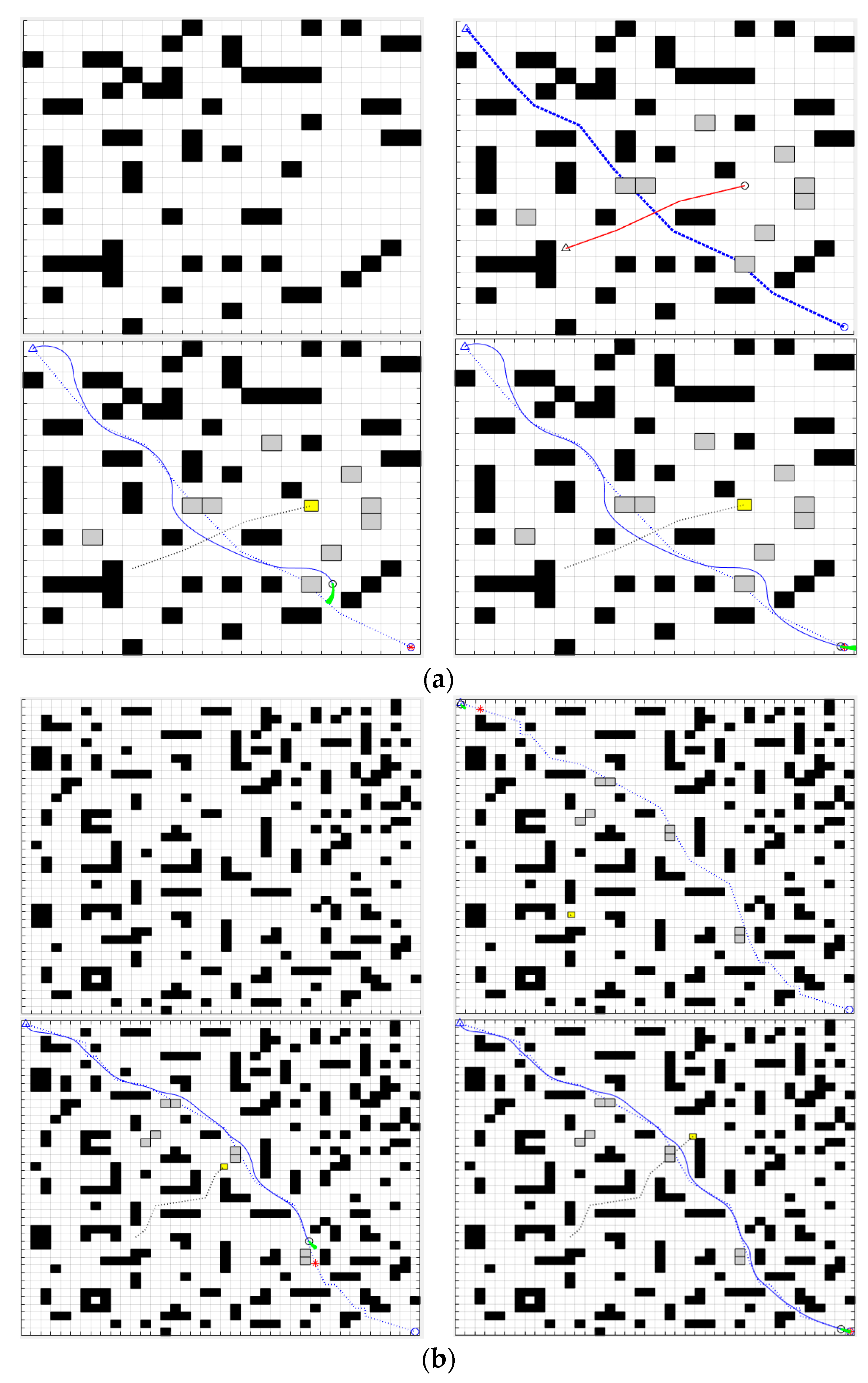
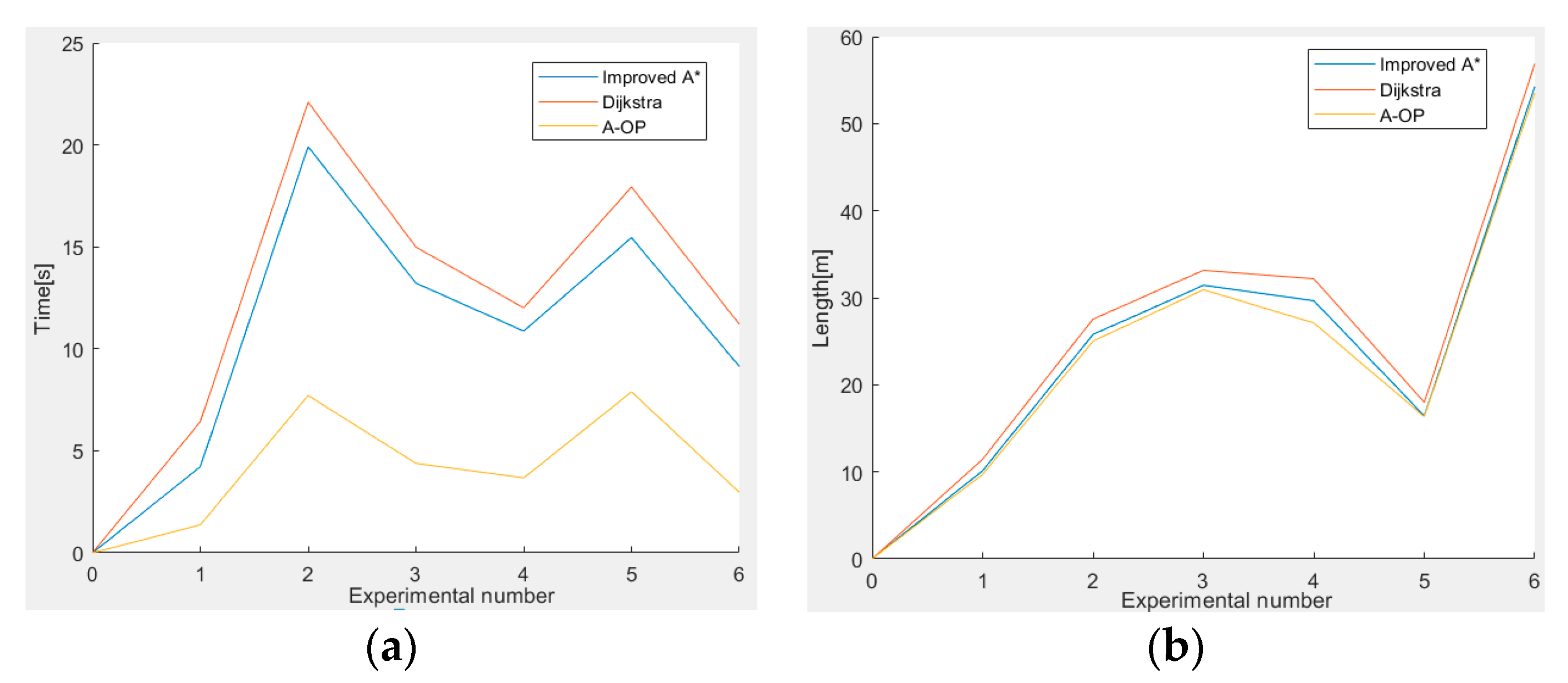
6.3. A-OP Algorithm Simulation Experiment
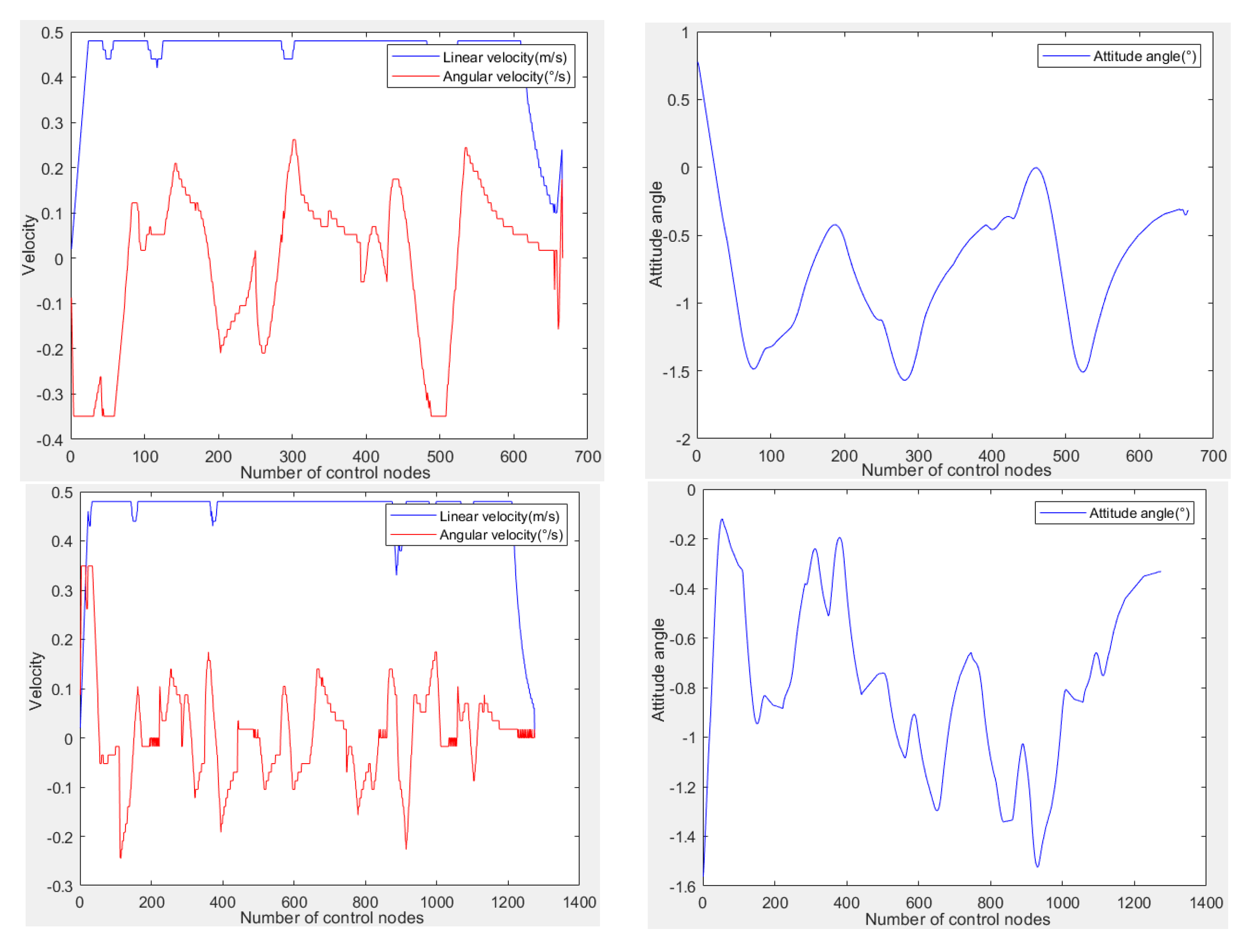
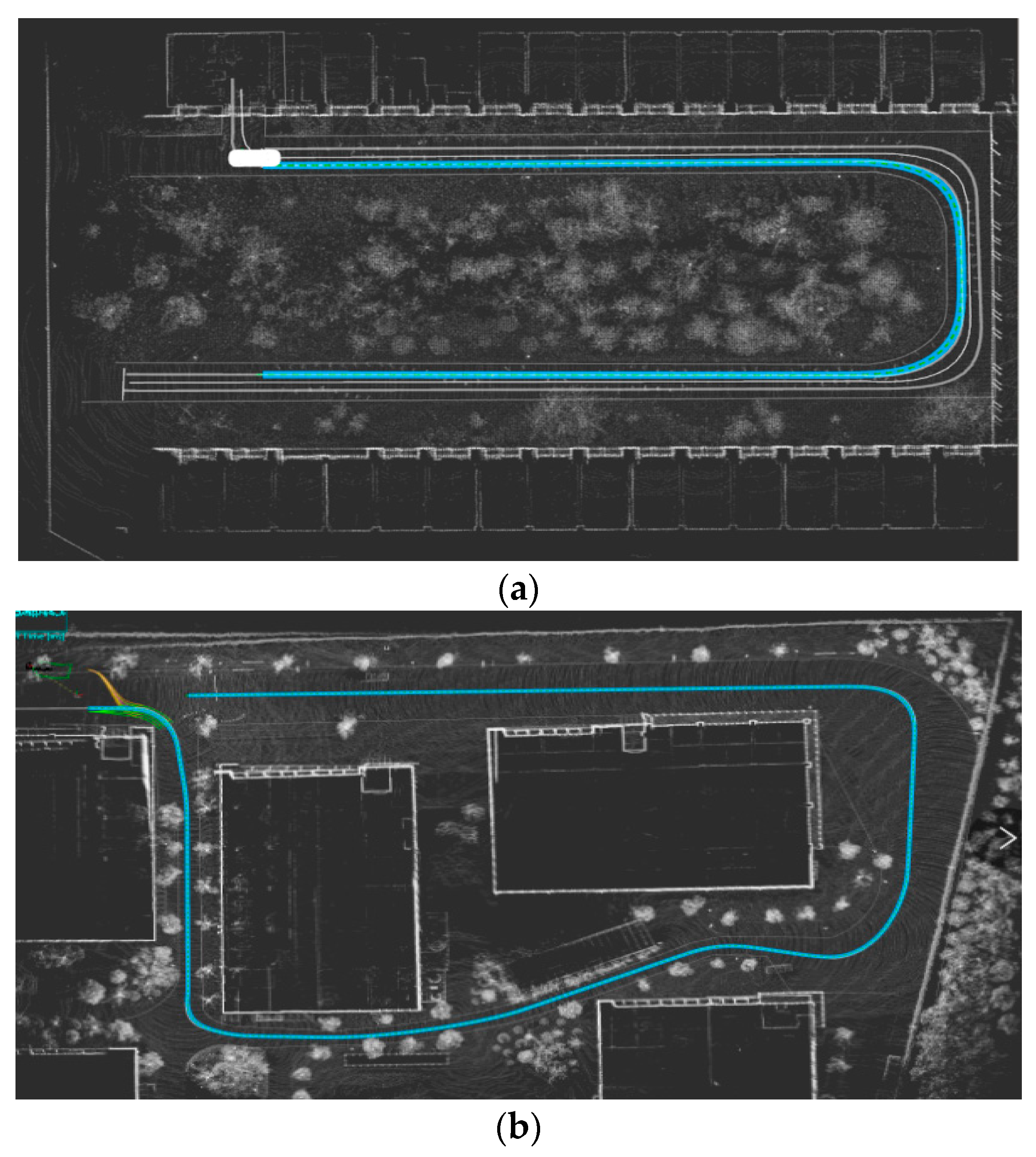
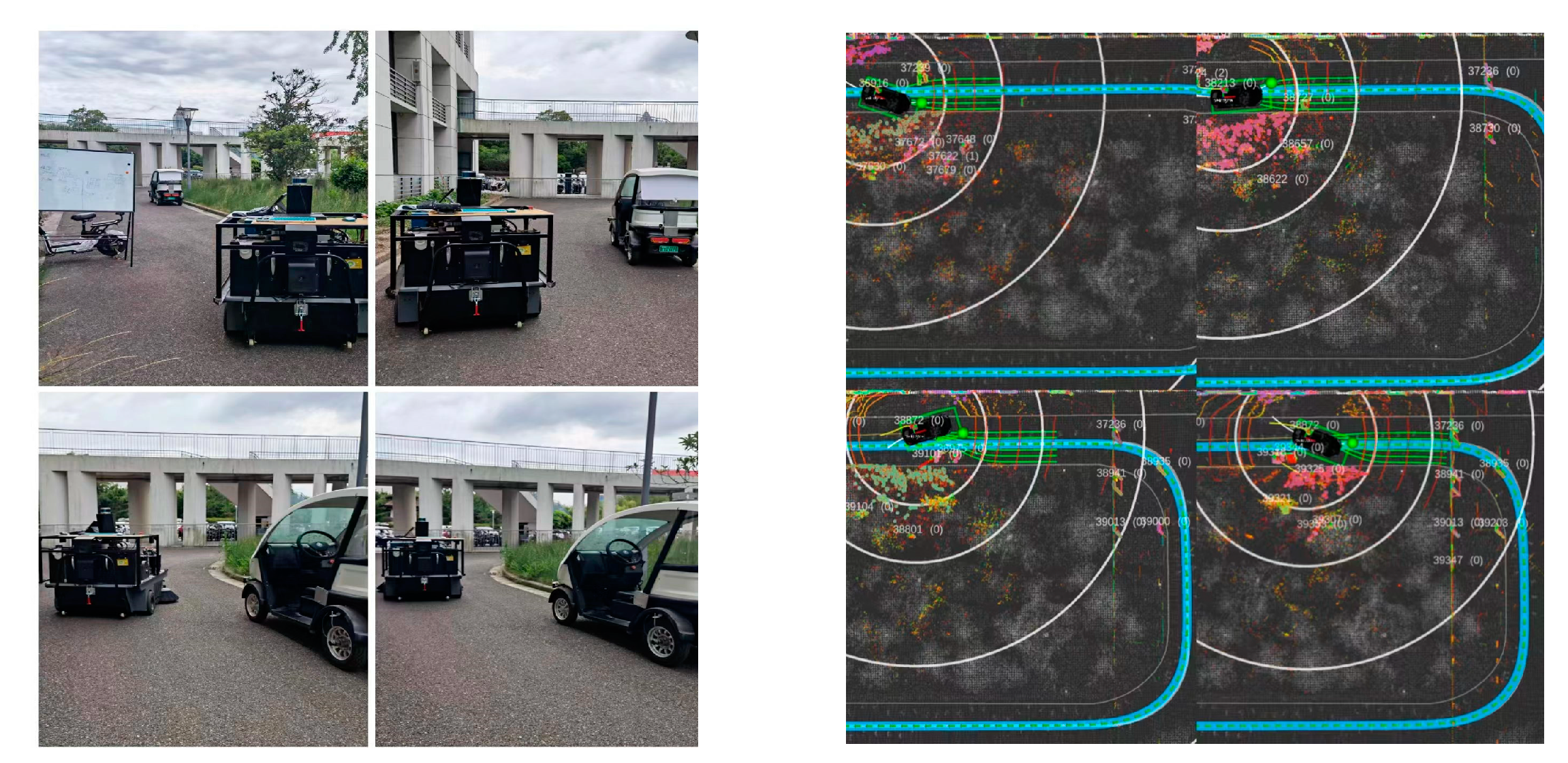
6.4. Real-Time Motion Planning
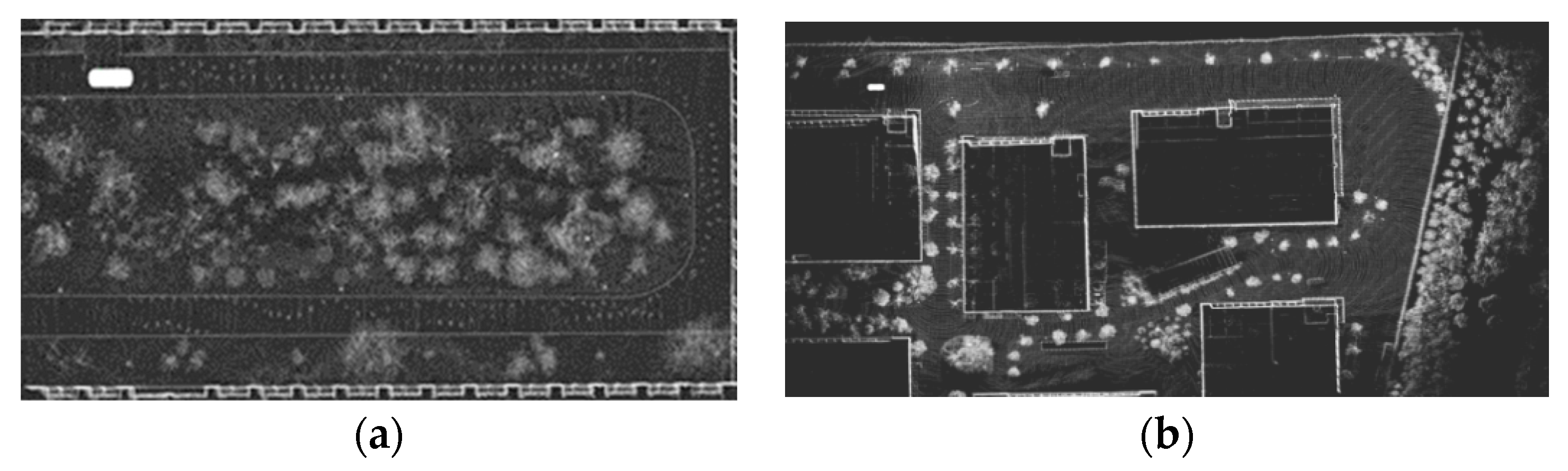
6.5. Experimental Verification of Improved A* Algorithm and Fusion Algorithm
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Berntorp, K. Path planning and integrated collision avoidance for autonomous vehicles. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 4023–4028. [Google Scholar]
- Parent, M.; Gallais, G. Driverless transportation in cities with CTS. In Proceedings of the 2002 Proceedings of the IEEE, International Conference on Driverless Transportation Systems, Singapore, 3–6 September 2002; pp. 826–830. [Google Scholar]
- Tang, G.; Tang, C.; Claramunt, C.; Hu, X.; Zhou, P. Geometric A-Star Algorithm: An Improved A-Star Algorithm for AGV Path Planning in a Port Environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
- Li, W.G.; Wang, L.J.; Fang, D.X.; Li, Y.W.; Huang, J. Path planning algorithm combining A*and dynamic window method. Syst. Eng. Electron. 2021, 43, 3694–3702. [Google Scholar]
- Zhang, Z.; Zhao, Z. A multiple mobile robots path planning algorithm based on A-star and Dijkstra algorithm. Int. J. Smart Home 2014, 8, 75–86. [Google Scholar] [CrossRef] [Green Version]
- Mirino, A.E. Best routes selection using Dijkstra and Floyd-Warshall algorithm. In Proceedings of the 2017 11th International Conference on Information & Communication Technology and System, Surabaya, Indonesia, 31 October 2017; pp. 155–158. [Google Scholar]
- Chen, L.; Shan, Y.X.; Tian, W.; Li, B.J.; Cao, D.P. A Fast and Efficient Double-Tree RRT∗-Like Sampling-Based Planner Applying on Mobile Robotic Systems. IEEE/ASME Trans. Mechatron. 2018, 23, 2568–2578. [Google Scholar] [CrossRef]
- Liu, E.H.; Gao, W.B.; Kong, R.P.; Liu, B.Y.; Dong, Y.; Chen, Y.Y. Improved RRT path planning algorithm. Comput. Eng. Des. 2019, 40, 2253–2258. [Google Scholar]
- Khodabandeh, M.; Saryazdi, M.G.; Ohadi, A. Multi-objective optimization of auto-body fixture layout based on an ant colony algorithm. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 1137–1145. [Google Scholar] [CrossRef]
- Alobaedy, M.M.; Khalaf, A.A.; Muraina, I.D. Analysis of the number of ants in ant colony system algorithm. In Proceedings of the 2017 5th International Conference on Information and Communication Technology, Melaka, Malaysia, 17–19 May 2017; pp. 1–5. [Google Scholar]
- Wang, M. Real-time path optimization of mobile robots based on improved genetic algorithm. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 646–651. [Google Scholar] [CrossRef]
- Sun, B.; Jiang, P.; Zhou, G.; Dong, D. AGV path planning based on improved genetic algorithm. Comput. Eng. Des. 2020, 41, 550–556. [Google Scholar]
- Li, C.H.; Wang, F.Y.; Song, Y.; Liang, Z.Y.; Wang, Z.Q. A Complete Coverage Path Planning Algorithm for Mobile Robot Based on FSM and Rolling Window Approach in Unknown Environment. In Proceedings of the 2015 34th Chinese Control Conference, Hangzhou, China, 14 September 2015; IEEE: New York, NY, USA, 2015; pp. 5881–5885. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The Dynamic Window Approach to Collision Avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- AlShawi, I.S.; Yan, L.; Pan, W.; Luo, B. Lifetime enhancement in wireless sensor networks using fuzzy approach and A-star algorithm. IEEE Sens. J. 2012, 12, 3010–3018. [Google Scholar] [CrossRef]
- Azzabi, A.; Nouri, K. An advanced potential field method proposed for mobile robot path planning. Trans. Inst. Meas. Control 2019, 41, 3132–3144. [Google Scholar] [CrossRef]
- Darweesh, H.; Takeuchi, E.; Takeda, K.; Ninomiya, Y.; Sujiwo, A.; Morales, L.Y.; Akai, N.; Tomizawa, T.; Kato, S. Open Source Integrated Planner for Autonomous Navigation in Highly Dynamic Environments. J. Robot. Mechatron. 2017, 29, 668–684. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, X.P.; Zhang, S. Trajectory optimization of quadrotor uav based on Bessel curve. In Proceedings of the 2019 14th IEEE International Conference on Electronic Measurement & Instruments, Changsha, China, 1–3 November 2019; pp. 1434–1440. [Google Scholar]
- Chen, Y.D.; Wang, P.L.; Lin, Z.C.; Sun, C.H. Global Path Planning Method by Fusion of A-star Algorithm and Sparrow Search Algorithm. In Proceedings of the 2022 IEEE 11th Data Driven Control and Learning Systems Conference, Chengdu, China, 3–5 August 2022; pp. 205–209. [Google Scholar]
- Wang, H.; Duan, J.; Wang, M.; Zhao, J.; Dong, Z. Research on Robot Path Planning Based on Fuzzy Neural Network Algorithm. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 1800–1803. [Google Scholar]
- Li, M.; Hu, J.; Li, L. Multipath Planning Based on Neural Network Optimized with Adaptive Niche in Unknown Environment. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010; pp. 761–764. [Google Scholar]
- Sun, J.Z.; Yu, X.L.; Cao, X.; Kong, X.F.; Gao, P.Y.; Luo, H.T. SLAM Based Indoor Autonomous Navigation System for Electric Wheelchair. In Proceedings of the 2022 7th International Conference on Automation, Control and Robotics Engineering, Xi’an, China, 14–16 July 2022; pp. 269–274. [Google Scholar]
- Tun, W.N.; Kim, S.; Lee, J.W.; Darweesh, H. Open-Source Tool of Vector Map for Path Planning in Autoware Autonomous Driving Software. In Proceedings of the 2019 IEEE International Conference on Big Data and Smart Computing, Kyoto, Japan, 27 February–2 March 2019; pp. 1–3. [Google Scholar]
- Li, Z.; Shi, R.; Zhang, Z. A new path planning method based on sparse A* algorithm with map segmentation. Trans. Inst. Meas. Control 2022, 44, 916–925. [Google Scholar]
- Wang, H.W.; Qi, X.Y.; Lou, S.J.; Jing, J.; He, H.; Liu, W. An Efficient and Robust Improved A* Algorithm for Path Planning. Symmetry 2021, 13, 2213. [Google Scholar] [CrossRef]
- Xiong, X.Y.; Min, H.T.; Yu, Y.B.; Wang, P. Application improvement of A* algorithm in intelligent vehicle trajectory planning. Math. Biosci. Eng. 2020, 18, 21. [Google Scholar] [CrossRef]
- Li, S.M.; Wang, Y.F.; Zhang, B.Z.; Li, Q.Y. Improvement of A* valuation function in complex distribution route optimization. Comput. Eng. Sci. 2019, 298, 1874–1881. [Google Scholar]
- Greg, D. Dual-mode dynamic window approach to robot navigation with convergence guarantees. J. Control Decis. 2020, 8, 1–20. [Google Scholar]
- Zhang, Z.W.; Zhang, P.; Mao, H.P.; Li, X.J.; Cheng, L.P. Research on robot path planning with improved A* algorithm. Electro-Opt. Control 2021, 274, 21–25. [Google Scholar]
- Zhang, Y.W.; Qiao, Y.; Li, C.F. Variable step-size bidirectional A* algorithm based on quadtree grid environment. Control Eng. 2021, 28, 1960–1966. [Google Scholar]
- Bian, Y.M.; Ji, P.C.; Zhou, Y.H.; Lang, M. Path planning of mobile robot obstacle avoidance based on improved DWA. J. China Constr. Mach. 2021, 19, 44–49. [Google Scholar]
- Wang, W.; Pei, D.; Feng, Z. Shortest path planning of mobile robot with improved A* algorithm. Comput. Appl. 2018, 333, 1523–1526. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Map | Path Length | Time/s |
|---|---|---|---|
| Traditional A* | Simple map | 31.38 | 10.97 |
| Fusion algorithms | Simple map | 30.88 | 7.88 |
| Traditional A* | Complex map | 95.43 | 20.33 |
| Fusion algorithms | Complex map | 94.65 | 15.63 |
| Parameters of Unmanned Sweeper | Numeric Value |
|---|---|
| Maximum line speed (km/h) | 2 |
| Maximum angular velocity (°/s) | 0.35 |
| Experimental Number | Dijkstra | Improved A* | Proposed Method (A-OP) | |||
|---|---|---|---|---|---|---|
| Path Length/m | Time/s | Path Length/m | Time/s | Path Length/m | Time/s | |
| 1 | 11.45 | 6.37 | 10.13 | 4.22 | 9.71 | 1.37 |
| 2 | 56.87 | 22.09 | 54.28 | 19.91 | 53.53 | 15.18 |
| 3 | 33.15 | 14.99 | 31.43 | 13.22 | 30.93 | 9.91 |
| 4 | 32.17 | 12.01 | 29.66 | 10.87 | 29.04 | 6.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Ping, P.; Shi, Q. Research on the Path Planning of Unmanned Sweepers Based on a Fusion Algorithm. Appl. Sci. 2023, 13, 2725. https://doi.org/10.3390/app13042725
Ma Y, Ping P, Shi Q. Research on the Path Planning of Unmanned Sweepers Based on a Fusion Algorithm. Applied Sciences. 2023; 13(4):2725. https://doi.org/10.3390/app13042725
Chicago/Turabian StyleMa, Yongjie, Peng Ping, and Quan Shi. 2023. "Research on the Path Planning of Unmanned Sweepers Based on a Fusion Algorithm" Applied Sciences 13, no. 4: 2725. https://doi.org/10.3390/app13042725