2.1. Re-Parameterization of Bezier Surface Modeling
The Bezier method has a very fast calculation speed in the case of a few control points and can ensure that the surface is smooth in the case of any control point arrangement. It is generated by interpolating the control points based on the Bernstein basis function, given as Equations (2) and (3). At the same time, the model established using the Bezier method is completely and only determined by the relative positions of the control points. Therefore, this method can ensure the same modeling with the control point data and facilitate surface reconstruction. Therefore, the Bezier method is the basis of many commonly used methods [
28,
29]. This study gave full play to the advantages of the classical Bezier method, and at the same time, puts forward some improved ideas and methods for its shortcomings.
If
control points
are given in a known space, let
where
,
, the surface
represented by Formula (1) is a Bezier surface determined by
control points, and
and
are Bernstein basis functions of different orders:
where
.
The data used in the geometric modeling process in this study was the actual collected cardiac local surface position information, and each frame was composed of a
dot matrix. According to the definition of a Bezier surface, it is known that the surface is a biquadratic Bezier surface, and its expression is
The matrix form is
where
represents the coordinates of any point on the surface and
and
are second-order Bernstein basis functions, where the control point coordinates are
The Bezier surface geometric modeling process needs to know the control point coordinates, and the Bezier surface calculates the points on the surface through the control points and parameters
. Therefore, to calculate the coordinates of the control points, we need to know not only the points on the surface but also the parameters
. Since the data set approximately represents a uniform rectangular area, the
corresponding to each coordinate point in this case is
The control point coordinates corresponding to the surface can be inversely calculated according to Formula (4), and then the biquadratic Bezier surface can be determined according to the Bezier surface given in Formula (1).
Considering that the Bezier surface definition requires known control points but the data set acquisition usually obtains mismatching of surface points, this study re-parameterized Equation (4) so that the coordinates of the data set can be directly brought into the formula for Bezier surface modeling and calculation, thus saving a lot of the control point coordinate calculation process. Through experimental calculation, under the same conditions, the model’s FPS (frames per second) without an improved calculation process is about 250 FPS and the improved FPS is about 280 FPS, which improves the system efficiency.
The specific re-parameterization method is as follows.
For the biquadratic Bezier surface with a
dot matrix, set the data points collected in advance and the control points of the corresponding Bezier surface as follows:
Since the coordinates of the data points are approximately evenly distributed at equal intervals, the distribution is as shown in the figure.
Then, we can know from the endpoint position property of the Bezier surface that
Then, according to
Figure 1 and Equation (4), the expression of the remaining data points is calculated as follows:
Combining Equations (6) and (7), the solution is
If Formula (8) is substituted into Formula (4), the following can be obtained:
The re-parameterization result of the biquadratic Bezier surface under the distribution of control points is shown in Formula (9). When used, the measurement data can be substituted into the above formula, eliminating the step of calculating control points.
For any Bezier surface modeling, although the results of re-parameterization are affected by the number of control points and the distribution of control points, the distribution of the measured data points can usually be determined in the process of manual measurement, and the measurement area is relatively fixed. Therefore, the re-parameterization method has certain universality. The ideas are summarized as follows.
If it is known that the modeling calculation formula of any Bezier surface is Formula (1), then the following process can take place:
Step 1: According to the endpoint position property of the Bezier surface, the control points at the four vertices of the surface are , , , and , and their values are equal to the four vertices at the corresponding positions of the measurement data set.
Step 2: According to the overall distribution of the data points in the measurement data set, the parameters corresponding to each point can be determined, that is, the corresponding to each data point can be determined. Then, according to the Bezier surface Formula (1), the equations represent each data point with control points, i.e., equations, including the four equations obtained in step 1.
Step 3: Solve the equations and rewrite them into the form of expressing control points with data points. There must not be two identical equations in the equations, and thus, it can only find one expression, that is, the correspondence between the finally determined data points and control points.
Step 4: Replace the control points in Formula (1) according to the corresponding relationship between the data points and the control points, that is, obtain the surface calculation formula after re-parameterization.
The above method solves the problem that the control points in the Bezier method are not on the surface to some extent via re-parameterization. The data obtained in the actual measurement process are generally of the same distribution, and thus, only one reverse calculation process is required, which greatly improves the dynamic modeling efficiency of the Bezier method.
2.2. Base Surface Superposition Based on Prior Information
Since the control points in the Bezier method control the shape of the surface as a whole, the change in the control points will inevitably cause a change in the surface as a whole, making the model as smooth as possible in any case. However, this characteristic also causes the Bezier method to be unable to accurately fit many local characteristics of the object, such as the edges and corners in the local area.
To achieve this goal and enable the Bezier method to retain the inherent characteristics of the fitting object to a certain extent, this study proposed a method of superimposing the base surface according to prior information and the Bezier method. This method can introduce the local irregular characteristics of the object through the base surface while maintaining the smooth and continuous characteristics of the Bezier surface.
The stacking process can be roughly divided into two parts.
First, the local measurement of the object is used to fit a surface used to describe the inherent local irregular characteristics of the object, which is called the base surface. The surface needs to retain the surface details of the object, and thus, there are certain requirements for the accuracy of prior information.
After that, the base surface is superimposed and the calculation formulas of the two are fused. In the subsequent process, the data used by the base surface will not change, and thus, the Bezier surface will not be affected in the dynamic state.
After introducing the inherent characteristics of the base surface, the local characteristics will not affect the overall smoothness, and the invariance of the inherent characteristics can be guaranteed in the process of change. The superimposed base surface can easily introduce local characteristics. When the model accuracy is low, it will degenerate into a separate Bezier surface and still be able to complete the modeling work.
2.3. Anisotropic Optimization of the Particle Spring Model
In the classical particle spring model, the bending spring makes the influence range of a single particle larger by connecting the spaced particles. It is precisely because of the increase in this influence range that the edge of the deformation region is smooth [
15]. However, due to the structure of the bending spring, this ability is relatively more concentrated in the vertical and horizontal directions. Compared with uniform elastic physics, because it does not have anisotropy, the demand for the control ability in different directions is not high. However, for special objects, such as soft tissue surfaces, anisotropy as an important characteristic requires stronger control ability. Inspired by a bending spring, a spring can be added in the diagonal direction so that the model can more accurately represent the anisotropy in more directions.
After introducing this kind of diagonal spring, the topological structure of the particle spring model becomes as shown in
Figure 2. This topological structure retains the three types of springs in the classical particle spring model and adds a new type of spring. For the convenience of description, this paper refers to it as a reinforcing spring, which connects two particles separated by a particle in a diagonal direction. The main purpose is to give the particle stronger control ability in the diagonal direction. Through the combination of a reinforcing spring and a complete spring, the particle can cope with changes in more directions to fit more complex soft tissue heterogeneity.
To verify that the bending spring and the reinforcing spring have different control capabilities for the motion of the particle in different directions, this paper explains this through mathematical calculations. The process is as follows.
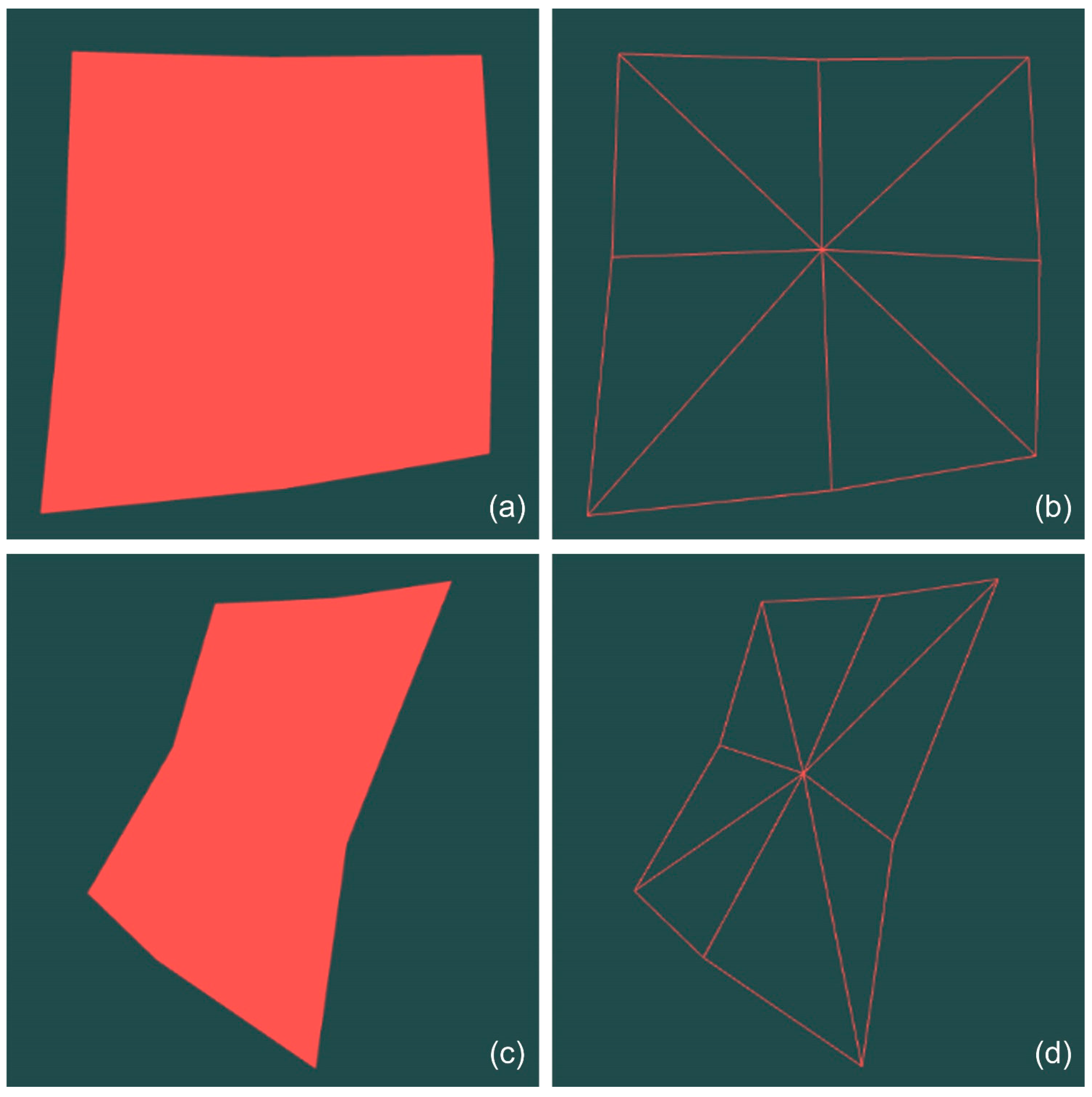
In the verification process, to minimize the interference of other factors, only two structures of the bending spring and reinforcing spring are retained. In the object model, the particle is located at the intersection of the grid composed of squares with a side length of 1, and the elastic coefficient of all springs is 1. The relaxation length is the distance between the particles in the grid at the time of initialization, and the calculation process uses a unified measurement standard, omitting the unit. The specific position of the particle in the experimental model is shown in
Figure 3a, and the bending spring and the reinforcing spring are shown in
Figure 3b,c.
The verification process is divided into two parts:
Move the particle at the center to the left by 0.5, as shown in
Figure 4a,b.
Move the particle at the center upward to the right, as shown in
Figure 4c,d.
After that, the forces generated by different structures on the central particle in each of the two cases are calculated. The calculation results are shown in
Table 1.
Through the calculation results of the two changes, it can be found that the control ability of the bending spring was stronger than that of the reinforcing spring in the transverse change process, and the control ability of the reinforcing spring in the diagonal direction was stronger than that of the bending spring, that is, the control ability of the two types of springs to the same change in the particle was different. Therefore, this showed that the method of improving the ability of the model to fit soft tissue heterogeneity by optimizing the topological structure of the particle spring model was effective.
2.4. Nonlinear Relationship Fitting Based on Parameter Dynamics
It is known that the dynamic equation of the basic unit in the mass–spring model can be expressed as
Among them, the elastic coefficient
and the damping coefficient
are constants representing the inherent characteristics of the spring and the damper, respectively. The particle spring model can fit the elastic deformation under normal conditions due to its internal structure composed of springs. However, because its dynamic equation is relatively simple, it cannot fit the nonlinear relationship between the stress and strain of biological tissues well [
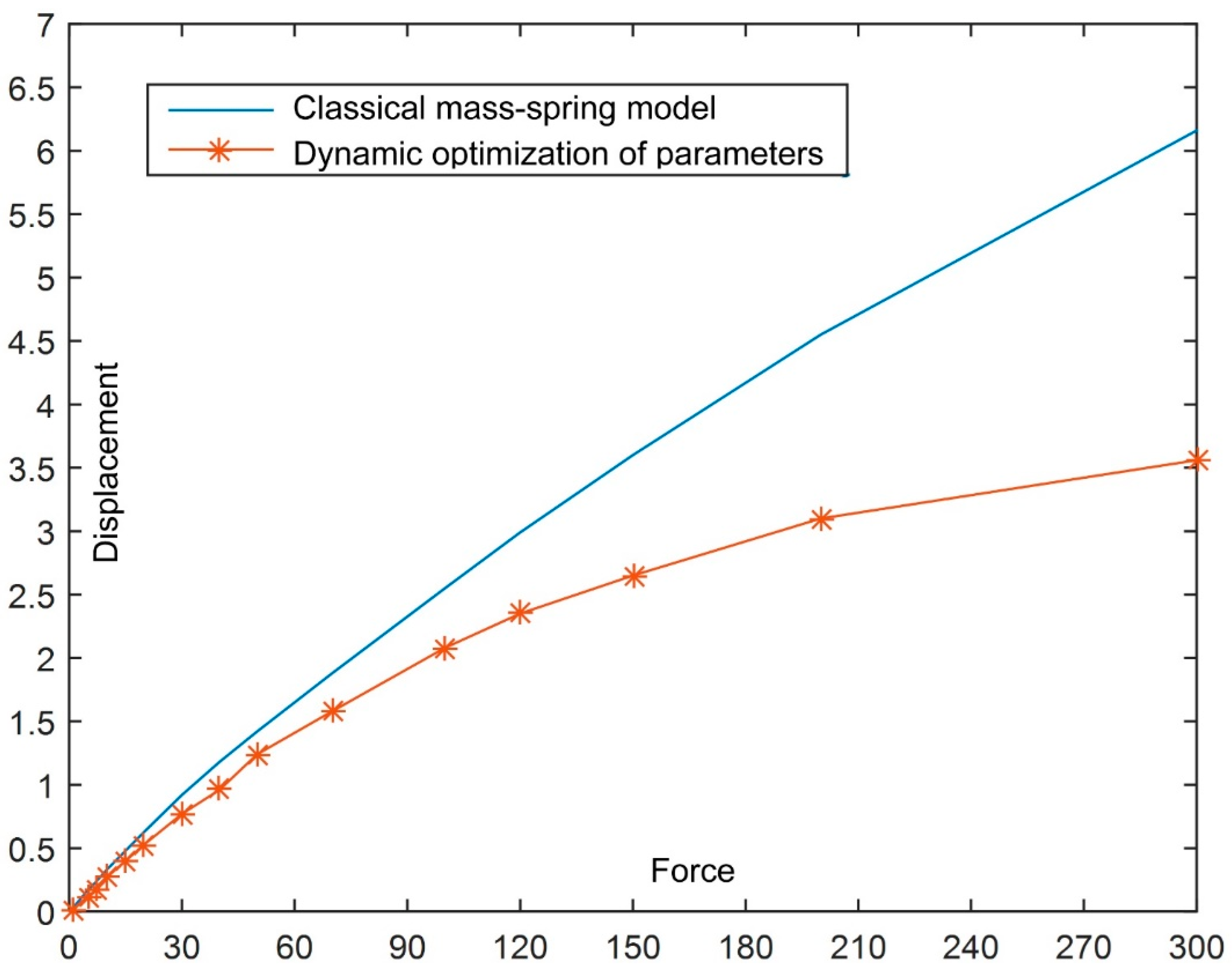
2]. In order to improve the ability of the mass–spring model in this respect, this study proposed to dynamically change the original constant elastic coefficient with the change in the corresponding spring length, thereby introducing a continuous nonlinear mapping to enable it to fit the more complex stress–strain relationship. This method is called parameter dynamics.
The ultimate purpose of this improvement is to control the changing relationship between the force and displacement of the particle through the dynamic elastic coefficient to fit the nonlinear relationship between the force and deformation of the biological tissue. During the modeling process, the force and deformation of the soft tissue correspond to the external force and displacement of the particle, respectively. Therefore, first, we need to find the relationship between the elastic coefficient and the force and displacement of the particle. In the mass–spring model, the process of deformation can be roughly expressed as follows: the mass is accelerated by the external force, and thus, the displacement occurs such that the length of the connecting spring of the mass changes and the elastic force is generated to balance the impact of the external force on the mass. In this process, the damping force is generated at the same time, and the hysteresis phenomenon occurs. After that, the force between the particles continues to spread. Finally, when the resultant force of all the particles is zero, the model reaches a new equilibrium state.
Theoretically, since the non-mapping relationship between the elastic coefficient and the corresponding spring length change is arbitrary, the fitting can also be arbitrary. However, considering the computational cost required by this method, the nonlinear relationship with a lower order should be selected as much as possible. Here, to show that the dynamic elasticity of this parameter can indeed introduce a nonlinear relationship, the derivation formula is as follows:
If the mapping relationship between the elastic coefficient
of any spring and the corresponding spring length change
is shown in Equation (12), where
represents the constant coefficient of the linear mapping
Then, according to Formula (11):
The above formula shows that there is a nonlinear relationship between the external force on the particle and the change in the spring length after the parameter is dynamic.
The above formula shows that the displacement of the particle and the change in the spring length also have a nonlinear relationship, and thus, it can be concluded that the nonlinear mapping of the basic element of any model can make the external force of the particle and the displacement of the particle have a nonlinear relationship.
To sum up, compared with the classical particle spring model, this study introduced the mapping of Formula (12) to achieve a more accurate nonlinear relationship between the force and displacement of particles, which showed that the method of introducing the nonlinear relationship through parameter dynamics was effective, and because this mapping relationship was not unique, the fitting nonlinear relationship had great flexibility. At the same time, in the same model, the nonlinear relations in different regions and directions could be realized by different mappings of different springs.
2.5. Viscoelastic Control Based on a Virtual Body Spring
Considering that the spring mesh in the mass–spring model is only distributed on the surface of the model, the control ability of the mass–spring model to the model object is mostly concentrated on the surface of the model, which leads to the inflexibility of the mass–spring model in fitting the changes in the direction perpendicular to the surface. The reason for this is that the mass–spring model itself does not have variables that describe the characteristics in the vertical direction, this problem was significantly improved with the appearance of virtual body springs [
26].
The method using virtual body springs is relatively simple, that is, the real-time position of the particle in the particle spring model and the corresponding initial position are connected by a virtual spring, and the relaxation length of the virtual spring is 0. The reason why it is called a virtual body spring is that the spring does not exist before the model changes, and it will only work after the model changes.
During the process of model deformation, the force generated by the virtual body spring is dynamic. After the model loses the external force, all the particles can reach the stable state when they are at the initial position, that is, the model can finally recover to the initial state through the force generated by the virtual body spring.
The main purpose of the virtual body spring method proposed by the original author is to give the model a sense of volume [
26], and the model can automatically return to the original state after removing the external force, which can make the simulation of elastic deformation of the particle spring model more realistic. However, the virtual body spring enables the particle spring model to obtain the control ability in the vertical surface direction. Based on this, this study undertook further research and, inspired by the dynamic parameters mentioned above, some improvements were made to the virtual body spring to enhance the ability of the model to fit the biological characteristics in the vertical surface direction.
The two previous optimizations are mainly used to improve the particle spring in response to the characteristics of soft tissue anisotropy and stress–strain nonlinearity. However, the spring mesh is coincident with the curved surface, and thus, it is difficult to show the viscoelasticity of biological tissue in the vertical direction, including creep, relaxation, and hysteresis [
16]. To solve this problem, a method was proposed in this study. Based on the virtual body spring structure, the elastic coefficient in the virtual body spring is remapped to make the elastic force produced by the virtual body spring more consistent with the viscoelastic characteristics.
The virtual body spring is still special in essence and the elastic force generated by it can be expressed as
In this study, the remapping of the elastic coefficient K was used to make Formula (15) better fit the viscoelasticity of biological tissue. Since the function of the damper itself is to reflect the hysteresis characteristics of elastic objects in the deformation process, to reduce the complexity of remapping, this study aimed to use the damper to fit the hysteresis characteristics and fit the creep and relaxation characteristics of biological tissue through remapping. To fit the above characteristics, first, it was necessary to determine the relationship between the force and the creep relaxation reaction.
Generally, the creep characteristic is mainly manifested in the process of biological tissue deformation, while the relaxation characteristic is mainly manifested in the process of biological tissue restitution [
19]. In terms of creep characteristics, when biological tissue is deformed from the initial state, even if the initial force is relatively small, the tissue will appear obviously offset, but the effect of the force on the offset distance will rapidly decrease with the increase in the offset distance of the object. For relaxation characteristics, because it is mainly manifested in the recovery process, the initial recovery state should be subject to a large force and the recovery speed is faster. As the offset distance between the object and the initial state becomes smaller and smaller, the recovery speed will become slower and slower. To understand this relationship more clearly, this study established an approximate relationship between the force and the object’s offset distance using the creep and relaxation characteristics in general.
Since the virtual body spring connects the actual position of the mass point and the corresponding initial position, and the relaxation length is 0, which makes the spring elongation equal to the displacement of the mass point, the change in the mass point can be judged using the change in the elongation of the virtual body spring corresponding to the mass point, that is, the model is in the process of stress deformation when the virtual body spring is extended, and the model is in the process of restoring the initial state when the virtual body spring is shortened.
From this, it can be seen that the creep characteristic shown in
Figure 5a can be fitted when the virtual body spring is extended, and the relaxation characteristic shown in
Figure 5b can be fitted when the spring is shortened. It is obvious that the approximate change relationship is nonlinear, but it can be seen from Equation (15) that the existing virtual body spring cannot realize the nonlinear relationship between the spring extension amount and the generated force. In the previous article, the parameter dynamic method was proposed to give the spring the ability to fit the non-linear relationship, which led us to consider the following: if the elastic coefficient of the virtual body spring is remapped, can it better fit the viscoelasticity of biological tissue?
The remapping process of the spring elastic coefficient of the virtual body is represented by Equation (16):
It can be seen from
Figure 5a,b that the changing relationship corresponding to the two characteristics is different, but both can be approximated as a quadratic curve. To fit the relationship, Equation (16) is expressed as:
where
,
, and
are adjustable parameters. If Equation (18) is substituted into Equation (17), we obtain
Through the above derivation, it can be shown that the creep and relaxation characteristics obtained by any measurement can be approximated using this mapping method, but different mapping relationships need to be selected when describing the creep and relaxation characteristics of the same model.
2.6. Calculation Process for the Physical Modeling
The calculation process for the particle spring model is roughly divided into two steps. The first step is to solve the acceleration of the particle, and the second step is to solve the position of the particle at the next time according to the acceleration obtained by the particle.
In the improved mass–spring model, the force acting on a single mass can be expressed as
where
is the elastic force generated by the structural spring,
is the elastic force generated by the shear spring,
is the elastic force generated by the bending spring,
is the elastic force generated by the reinforcing spring,
is the elastic force generated by the virtual body spring, and
is the external force applied at this point. The force
generated by any basic unit in the model can be expressed as
where
represents the mapping of the spring elastic coefficient,
represents the spring length at the current time,
represents the spring relaxation variable,
represents the damping coefficient, and
represents the current velocity of the particle.
The sum of the external forces on a single particle can be calculated using Equations (20) and (21), and then the acceleration of the particle can be obtained according to . Thus, the first step of the calculation process is completed. The acceleration is mainly determined by the parameters in the mass–spring model. The results of this process are controlled by adjusting the parameters and then entering the parameters to the second step of the calculation process.
The second step involves solving the position of the particle after the change. It is assumed that the initial position of the particle is
, the initial velocity is
, the initial acceleration is
, and the time step is t. Among the above parameters,
can be obtained in step 1,
is the data obtained via an advance measurement, and the time step is an adjustable parameter. Combined with
and
, the following can be obtained:
where
represents the velocity of the particle at the next time and
represents the position of the particle at the next time. This completes the second step of the calculation process. The result generated in this step is determined by the acceleration generated in step 1 and cannot be controlled. The model can be updated by the position of the particle at the next time obtained in this step.
When fitting the force deformation of the model, the total force of the particle changes. The acceleration is calculated in step 1, and then the new position is calculated in step 2 to determine whether the resultant force of the particle at the new position is zero. If the force on all the particles is zero under the current situation, the model will reach a new equilibrium state. If there are particles with a non-zero force, repeat the calculation process of step 1 and step 2 so that the position of the particles will continue to be updated. From a macro perspective, this shows the force deformation process of the model. When the resultant force on all the particles is zero, the particles will not generate new acceleration and displacement. At this time, the model is in a stable state.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}