

Adaptive Fractional-Order Anti-Saturation Synchronous Control for Dual-Motor Systems

Abstract
:Featured Application
Abstract
1. Introduction
2. The Proposed Synchronous Control Method for the Dual-Motor System
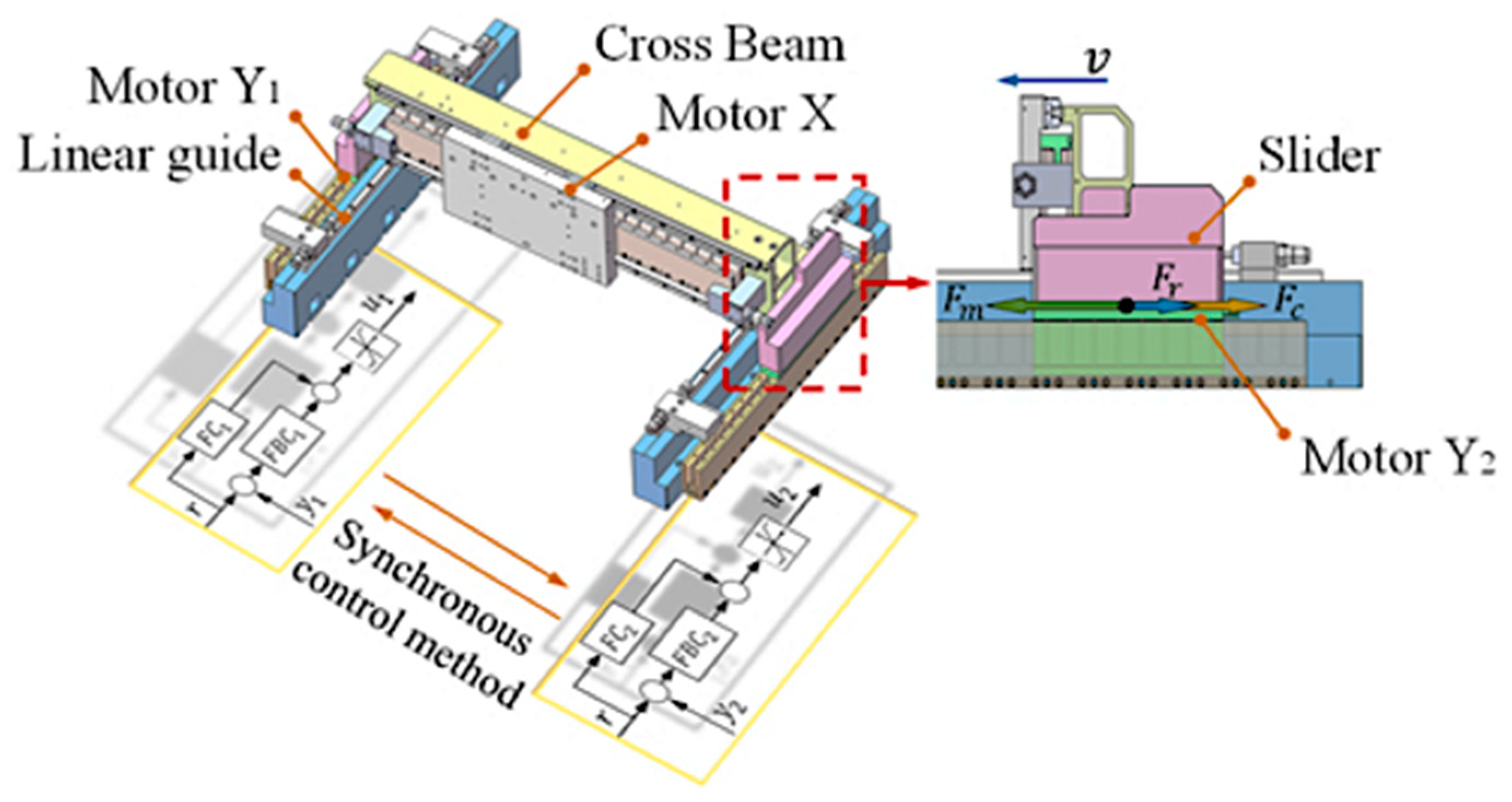
2.1. Kinetic Model of the Dual-Motor System
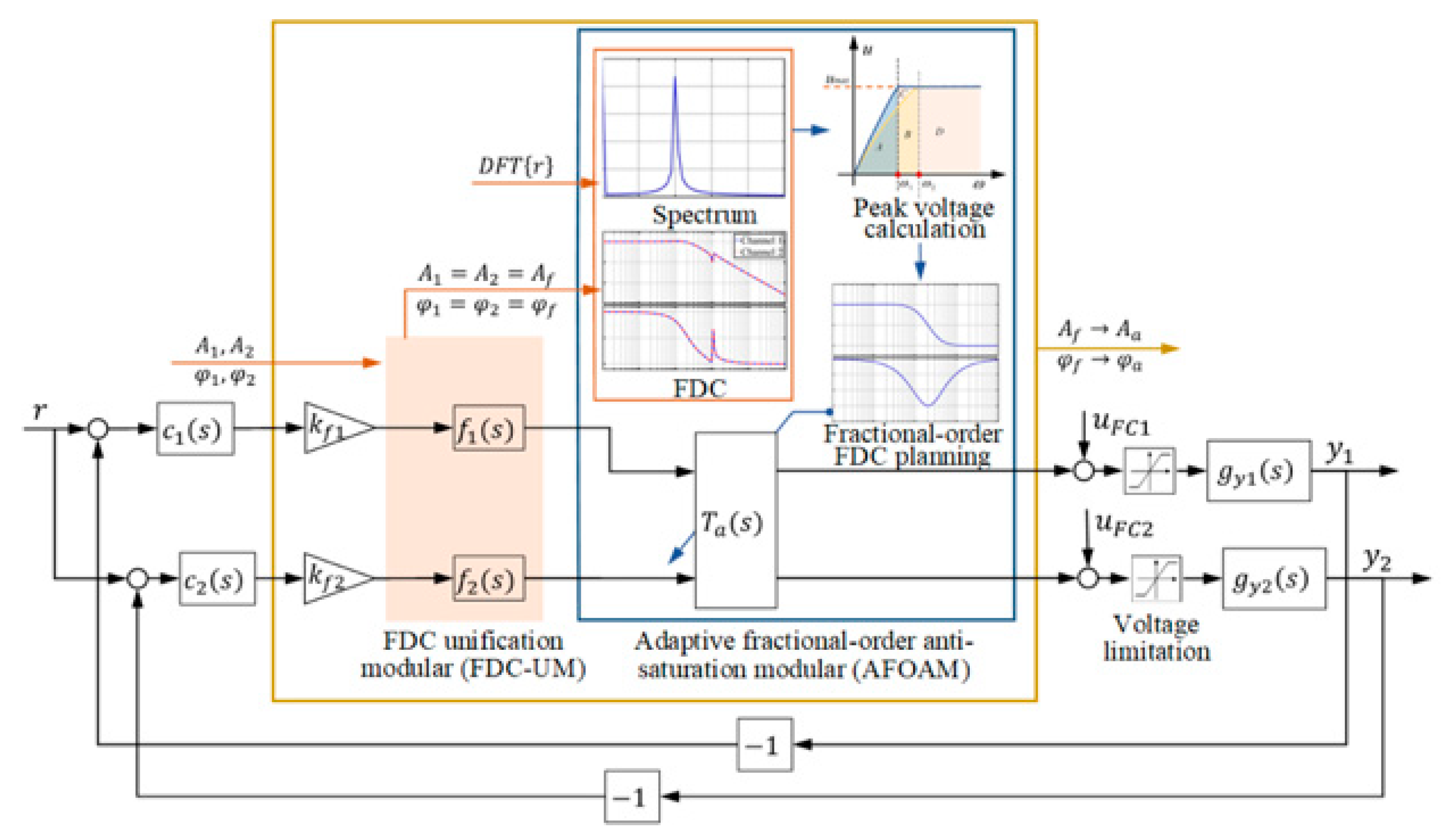
2.2. Description of the Proposed Method
3. Adaptive Fractional-Order Anti-Saturation Synchronous Control Method
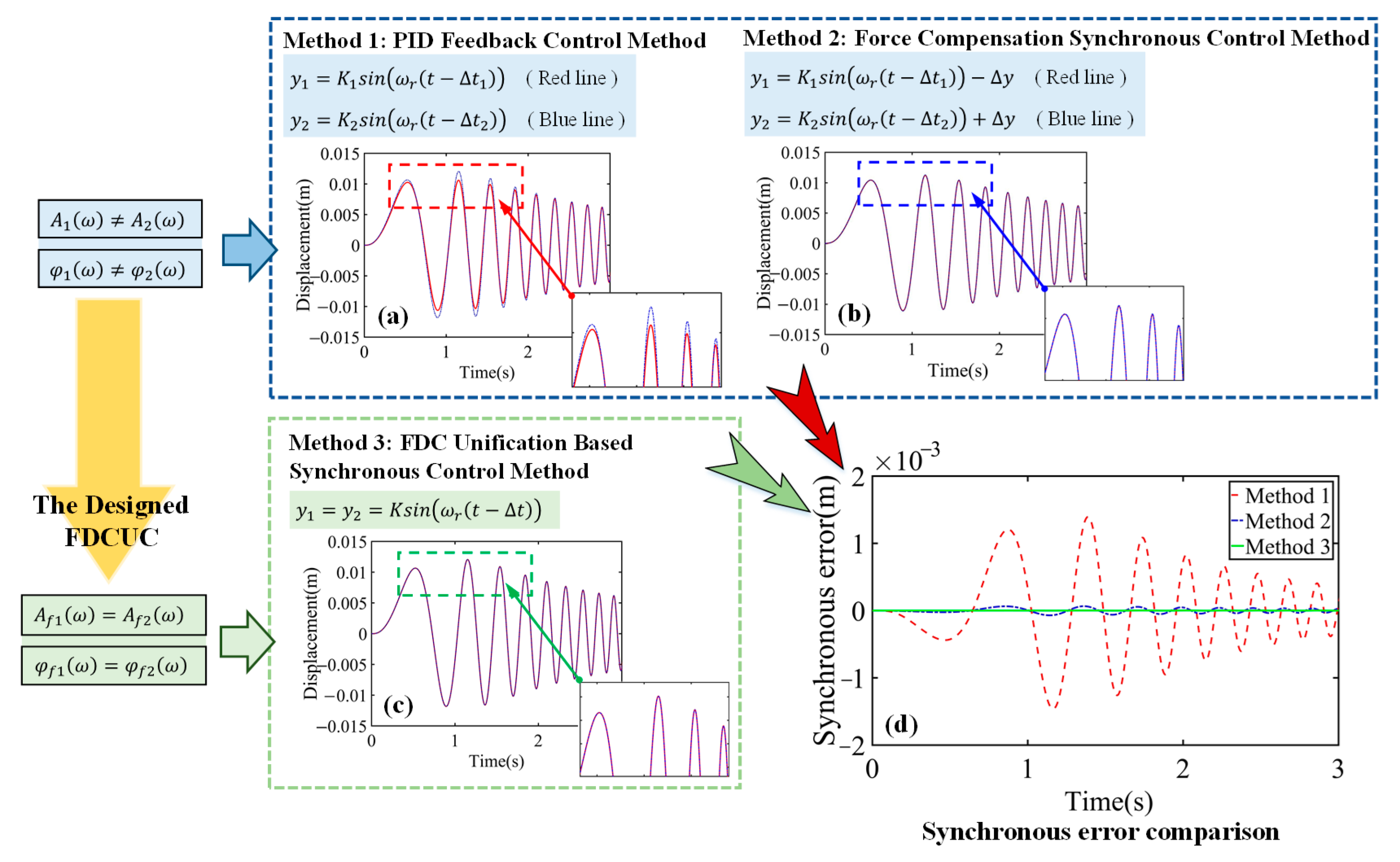
3.1. FDC Unification Module (FDC-UM)
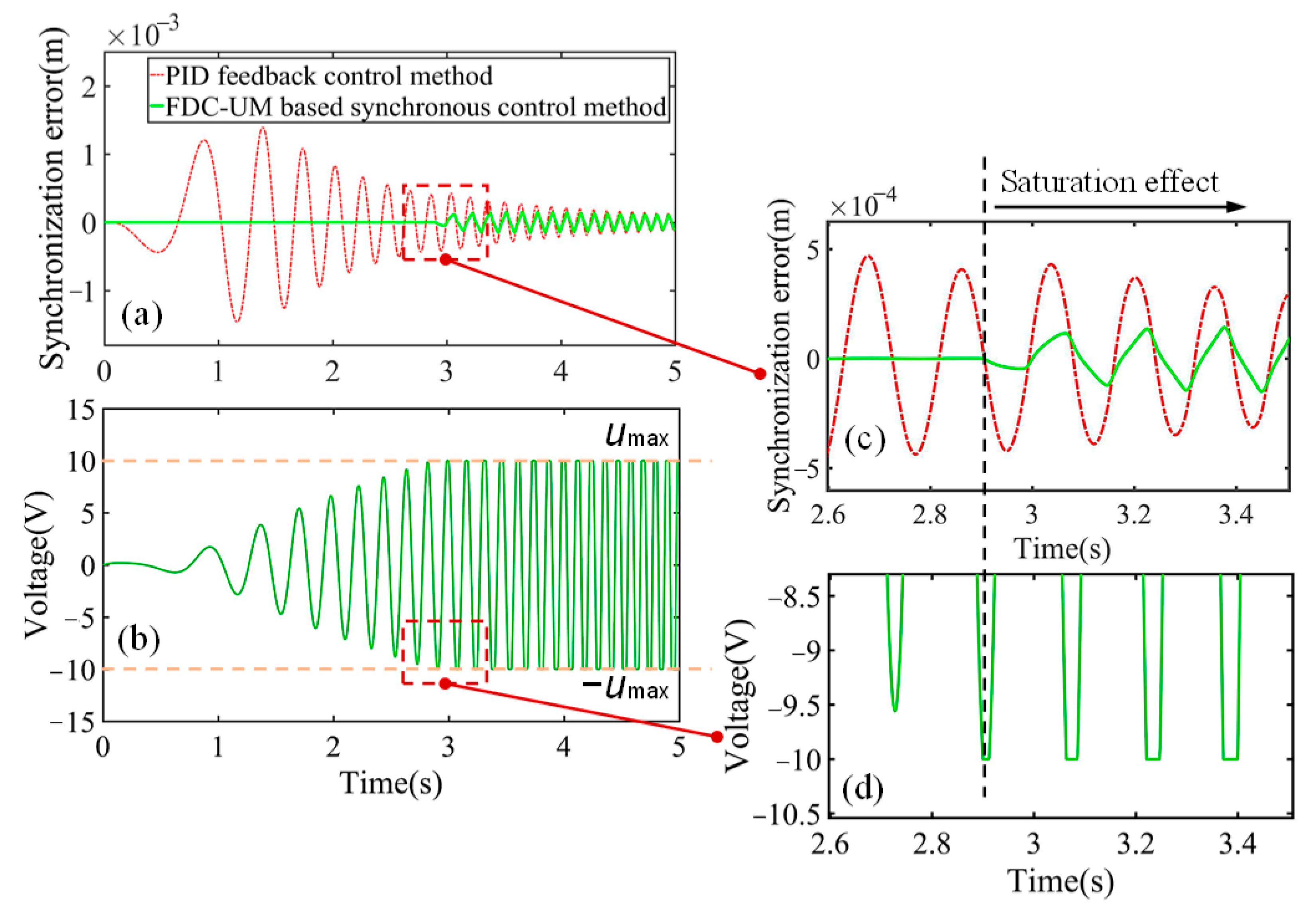
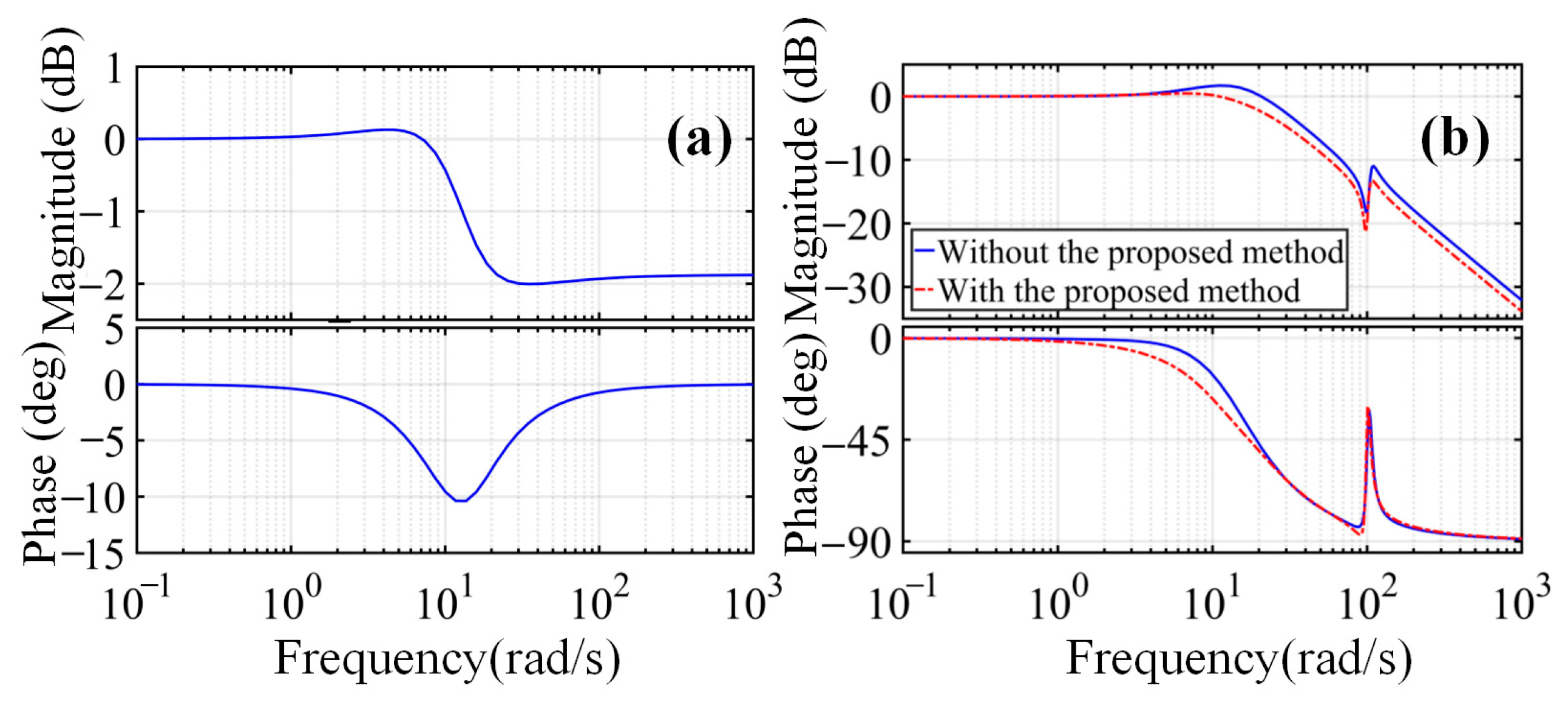
3.2. Adaptive Fractional-Order Anti-Saturation Module (AFOAM)
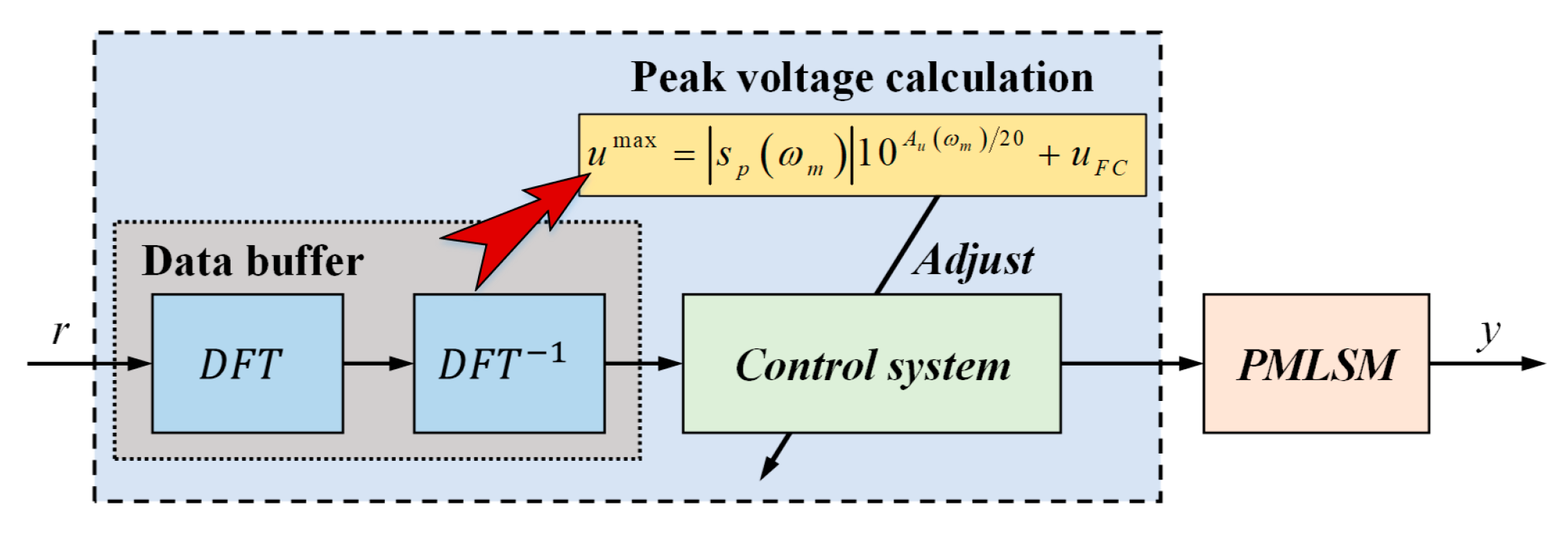
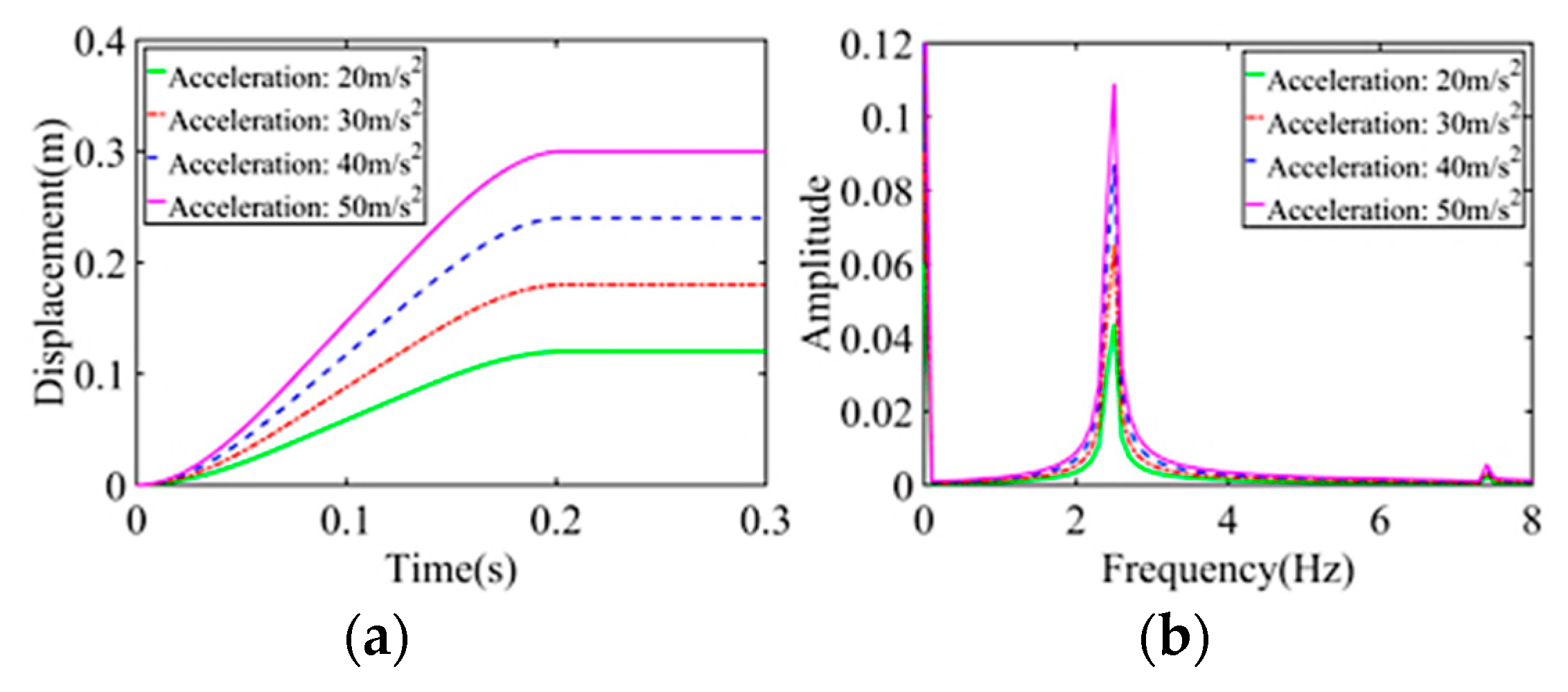
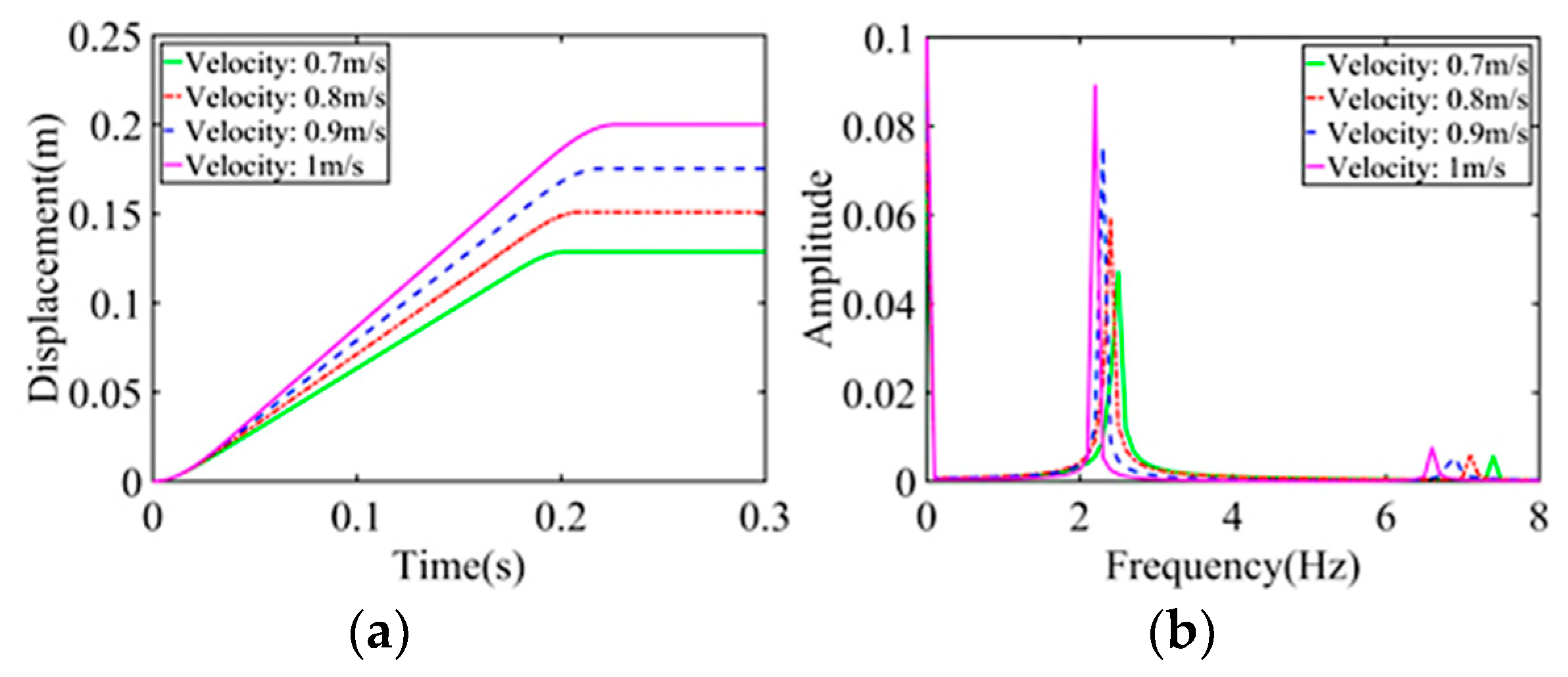
3.2.1. Peak Voltage Calculation and Amplitude Characteristic Adjustment Value Determination
3.2.2. AFOAM Design and Implementation
- A. AFOAM design
- B. Parameter determination
4. Experiment
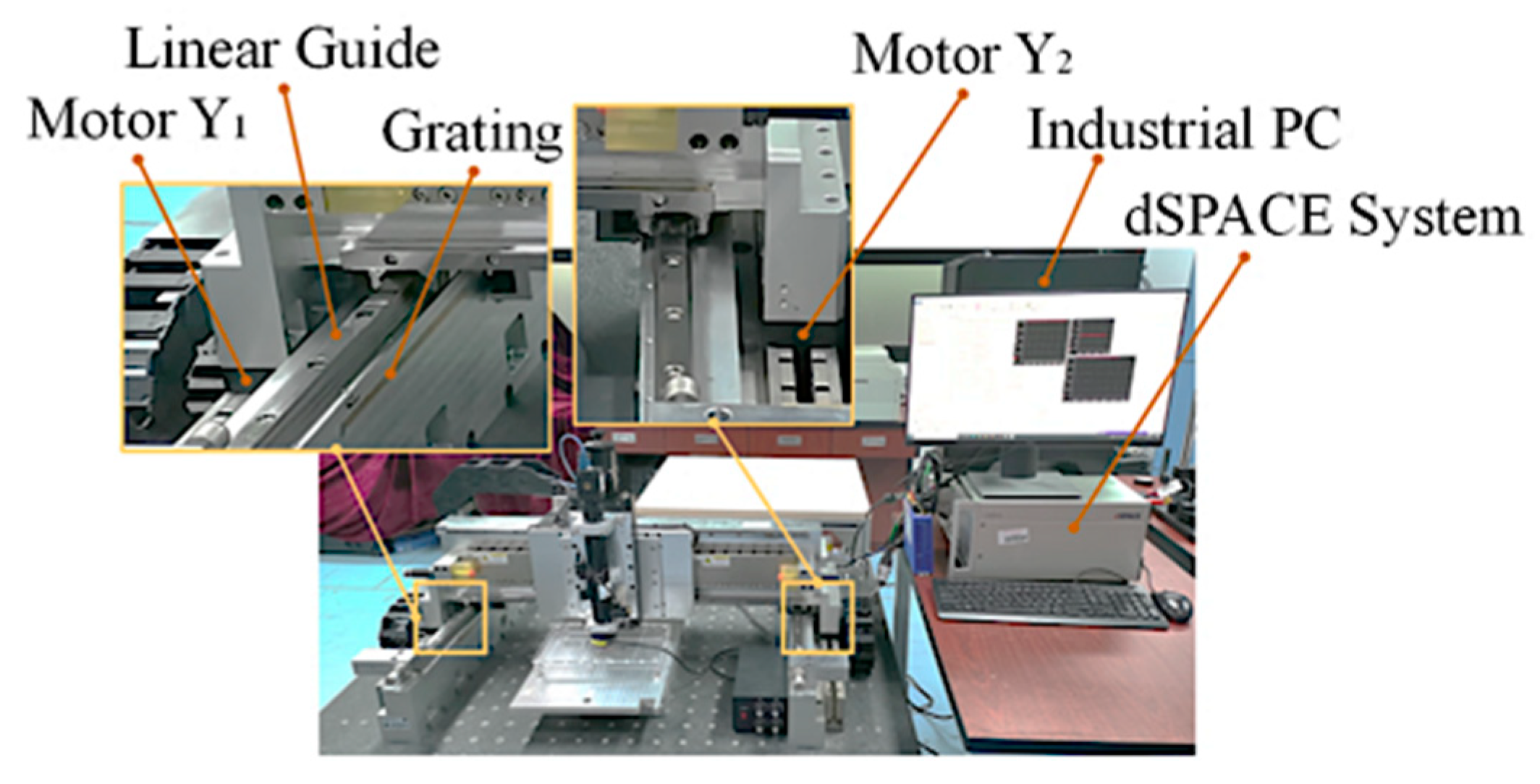
4.1. Experimental System
4.2. Synchronized Motion Experiments
4.2.1. Verification of Peak Voltage Calculation
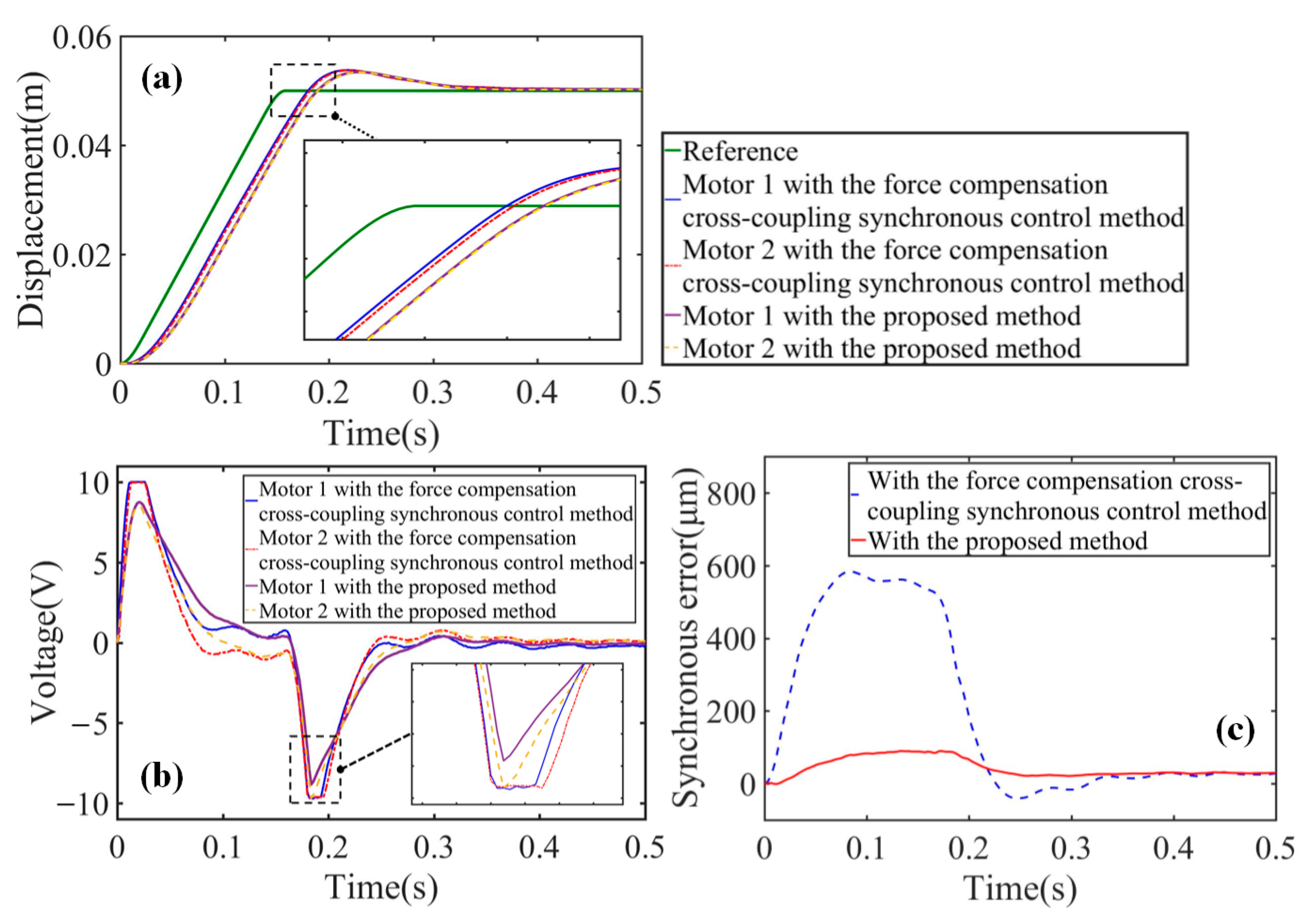
4.2.2. Synchronization Accuracy Verification
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tan, L.; Gao, J.; Luo, Y. Super-twisting sliding mode control with defined boundary layer for chattering reduction of permanent magnet linear synchronous motor. J. Mech. Sci. Technol. 2021, 35, 1829–1840. [Google Scholar] [CrossRef]
- Yu, W.; Yang, G.; Li, Z. A tubular linear motor structure suitable for large thrust. J. Mech. Sci. Technol. 2021, 35, 4987–4995. [Google Scholar] [CrossRef]
- Liu, W.; Shu, F.; Xu, Y. Iterative learning based neural network sliding mode control for repetitive tasks: With application to a PMLSM with uncertainties and external disturbances. Mech. Syst. Signal Process. 2022, 172, 108950. [Google Scholar] [CrossRef]
- Chung, S.-U.; Kim, J.-W.; Woo, B.-C. Design and experimental validation of doubly salient permanent magnet linear synchronous motor for precision position control. Mechatronics 2013, 23, 172–181. [Google Scholar] [CrossRef]
- Chen, S.-Y.; Chen, C.-S.; Yang, Z.-W. Self-tuning cross-coupled two degree-of-freedom PID control for position synchronization of dual linear motors. Appl. Math. Model. 2018, 64, 214–234. [Google Scholar] [CrossRef]
- Chen, R.; Yan, L.; Jiao, Z. Dynamic modeling and analysis of flexible H-type gantry stage. J. Sound Vib. 2019, 439, 144–155. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Kim, W.-J. Error analysis to minimize cross-axis couplings in 6-DOF motion systems with a single moving part. Precis. Eng. 2020, 63, 49–61. [Google Scholar] [CrossRef]
- Sarachik, P.; Ragazzini, J.R. A 2-dimensional feedback control system. In Transactions of the American Institute of Electrical Engineers, Part II: Applications and Industry; IEEE: New York, NY, USA, 1957; Volume 76, pp. 55–61. [Google Scholar]
- Koren, Y. Cross-Coupled Biaxial Computer Control for Manufacturing Systems. J. Dyn. Syst. Meas. Control 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Huo, F.; Poo, A.-N. improving contouring accuracy by using generalized cross-coupled control. Int. J. Mach. Tools Manuf. 2012, 63, 49–57. [Google Scholar] [CrossRef]
- Chen, W.; Wang, D.; Geng, Q. Robust adaptive cross-coupling position control of biaxial motion system. Sci. China Technol. Sci. 2016, 59, 680–688. [Google Scholar] [CrossRef]
- Zhu, X.; Yao, B.; Tao, G.; Wang, Q.; Cao, J. Adaptive robust synchronous control of a individual metering dual-cylinder pneumatic system with composite parallel method. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Besançon, France, 8–11 July 2014; pp. 304–309. [Google Scholar]
- Koren, Y.; Lo, C.C. Variable-Gain Cross-Coupling Controller for Contouring. CIRP Ann. 1991, 40, 371–374. [Google Scholar] [CrossRef]
- Chou, P.-H.; Chen, C.-S.; Lin, F.-J. DSP-based synchronous control of dual linear motors via Sugeno type fuzzy neural network compensator. J. Frankl. Inst. 2012, 349, 792–812. [Google Scholar] [CrossRef]
- Huang, Z.; Song, G.; Li, Y. Synchronous control of two counter-rotating eccentric rotors in nonlinear coupling vibration system. Mech. Syst. Signal Process. 2019, 114, 68–83. [Google Scholar] [CrossRef]
- García-Herreros, I.; Kestelyn, X.; Gomand, J. Model-based decoupling control method for dual-drive gantry stages: A case study with experimental validations. Control Eng. Pract. 2013, 21, 298–307. [Google Scholar] [CrossRef]
- Teo, C.S.; Tan, K.K.; Lim, S.Y. Dynamic modeling and adaptive control of a H-type gantry stage. Mechatronics 2007, 17, 361–367. [Google Scholar] [CrossRef]
- Wang, K.; Liu, X.; Su, H. Robust immersion and invariance adaptive coordinated control for a class of biaxial gantry systems. J. Control Decis. 2021, 9, 289–300. [Google Scholar] [CrossRef]
- Li, C.; Li, C.; Chen, Z. Adaptive thrust allocation based synchronization control of a dual drive gantry stage. Mechatronics 2018, 54, 68–77. [Google Scholar] [CrossRef]
- Gordon, D.J.; Erkorkmaz, K. Precision control of a T-type gantry using sensor/actuator averaging and active vibration damping. Precis. Eng. 2012, 36, 299–314. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, C.; Zhu, Y. Trajectory modification method based on frequency domain analysis for precision contouring motion control systems. Mech. Syst. Signal Process. 2021, 158, 107646. [Google Scholar] [CrossRef]
- Zou, M.; Fang, P.; Peng, H. Study on synchronization characteristics for self-synchronous vibration system with dual-frequency and dual-motor excitation. J. Mech. Sci. Technol. 2019, 33, 1065–1078. [Google Scholar] [CrossRef]
- Nirmala, R.J.; Balachandran, K.; Trujillo, J.J. Null controllability of fractional dynamical systems with constrained control. Fract. Calc. Appl. Anal. 2017, 20, 553–565. [Google Scholar] [CrossRef]
- Yaghooti, B.; Hosseinzadeh, M.; Sinopoli, B. Constrained control of semilinear fractional-order systems: Application in drug delivery systems. In Proceedings of the 2020 IEEE Conference on Control Technology and Applications (CCTA), Montreal, QC, Canada, 24–26 August 2020; pp. 833–838. [Google Scholar]
- Rhouma, A.; Bouani, F.; Bouzouita, B. Model predictive control of fractional order systems. J. Comput. Nonlinear Dyn. 2014, 9, 031011. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Gao, J.; Zhang, L. Fractional-order feedforward control method for permanent magnet linear synchronous motor based on frequency-domain adjustment theory. Mech. Syst. Signal Process. 2023, 190, 110115. [Google Scholar] [CrossRef]
- Dai, L.; Li, X.; Zhu, Y. The Generation Mechanism of Tracking Error During Acceleration or Deceleration Phase in Ultraprecision Motion Systems. IEEE Trans. Ind. Electron. 2019, 66, 7109–7119. [Google Scholar] [CrossRef]
- Tao, J.; Mercan, O. A study on a benchmark control problem for real-time hybrid simulation with a tracking error-based adaptive compensator combined with a supplementary proportional-integral-derivative controller. Mech. Syst. Signal Process. 2019, 134, 106346. [Google Scholar] [CrossRef]
- Yoon, J.Y.; Trumper, D.L. Friction microdynamics in the time and frequency domains: Tutorial on frictional hysteresis and resonance in precision motion systems. Precis. Eng. 2019, 55, 101–109. [Google Scholar] [CrossRef]
- Deng, Z.; Shang, J.; Nian, X. Synchronization controller design of two coupling permanent magnet synchronous motors system with nonlinear constraints. ISA Trans. 2015, 59, 243–255. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion Planning | Amplitude Spectrum | Voltage Amplitude Characteristic of the Motor Y1 (dB) | Peak Voltage (V) | δ | |||
|---|---|---|---|---|---|---|---|
| Acceleration (m/s2) | Velocity (m/s) | Frequency (Hz) | Peak Value | Experiment | Calculation | ||
| 20 | 0.8 | 2.5 | 0.0435 | 50.3265 | 14.8562 | 14.2828 | 3.86% |
| 30 | 1.2 | 2.5 | 0.0653 | 50.3265 | 22.2843 | 21.4406 | 3.79% |
| 40 | 1.6 | 2.5 | 0.0870 | 50.3265 | 29.7124 | 28.5655 | 3.86% |
| 50 | 2.0 | 2.5 | 0.1088 | 50.3265 | 37.1405 | 35.7233 | 3.82% |
| Experiment | Motion Planning | Control Method | Synchronization Error (μm) | RMSE Reduction (%) | ||||
|---|---|---|---|---|---|---|---|---|
| Displacement (m) | Velocity (m/s) | Acceleration (m/s2) | |MAX| | MAE | RMSE | |||
| 1 | 0.05 | 0.35 | 30 | Method 2 | 584.500 | 117.259 | 221.443 | - |
| Proposed method | 89.800 | 36.987 | 42.132 | 80.974 | ||||
| 2 | 0.05 | 0.5 | 30 | Method 2 | 561.600 | 80.388 | 161.193 | - |
| Proposed method | 52.900 | 31.436 | 32.338 | 79.938 | ||||
| 3 | 0.05 | 0.5 | 50 | Method 2 | 769.000 | 106.681 | 220.616 | - |
| Proposed method | 141.400 | 40.019 | 49.454 | 77.580 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, Y.; Gao, J.; Zhang, L. Adaptive Fractional-Order Anti-Saturation Synchronous Control for Dual-Motor Systems. Appl. Sci. 2023, 13, 2307. https://doi.org/10.3390/app13042307
Zhong Y, Gao J, Zhang L. Adaptive Fractional-Order Anti-Saturation Synchronous Control for Dual-Motor Systems. Applied Sciences. 2023; 13(4):2307. https://doi.org/10.3390/app13042307
Chicago/Turabian StyleZhong, Yongbin, Jian Gao, and Lanyu Zhang. 2023. "Adaptive Fractional-Order Anti-Saturation Synchronous Control for Dual-Motor Systems" Applied Sciences 13, no. 4: 2307. https://doi.org/10.3390/app13042307