



Performance Assessment of the Medium Frequency R-Mode Baltic Testbed at Sea near Rostock

Abstract
:1. Introduction
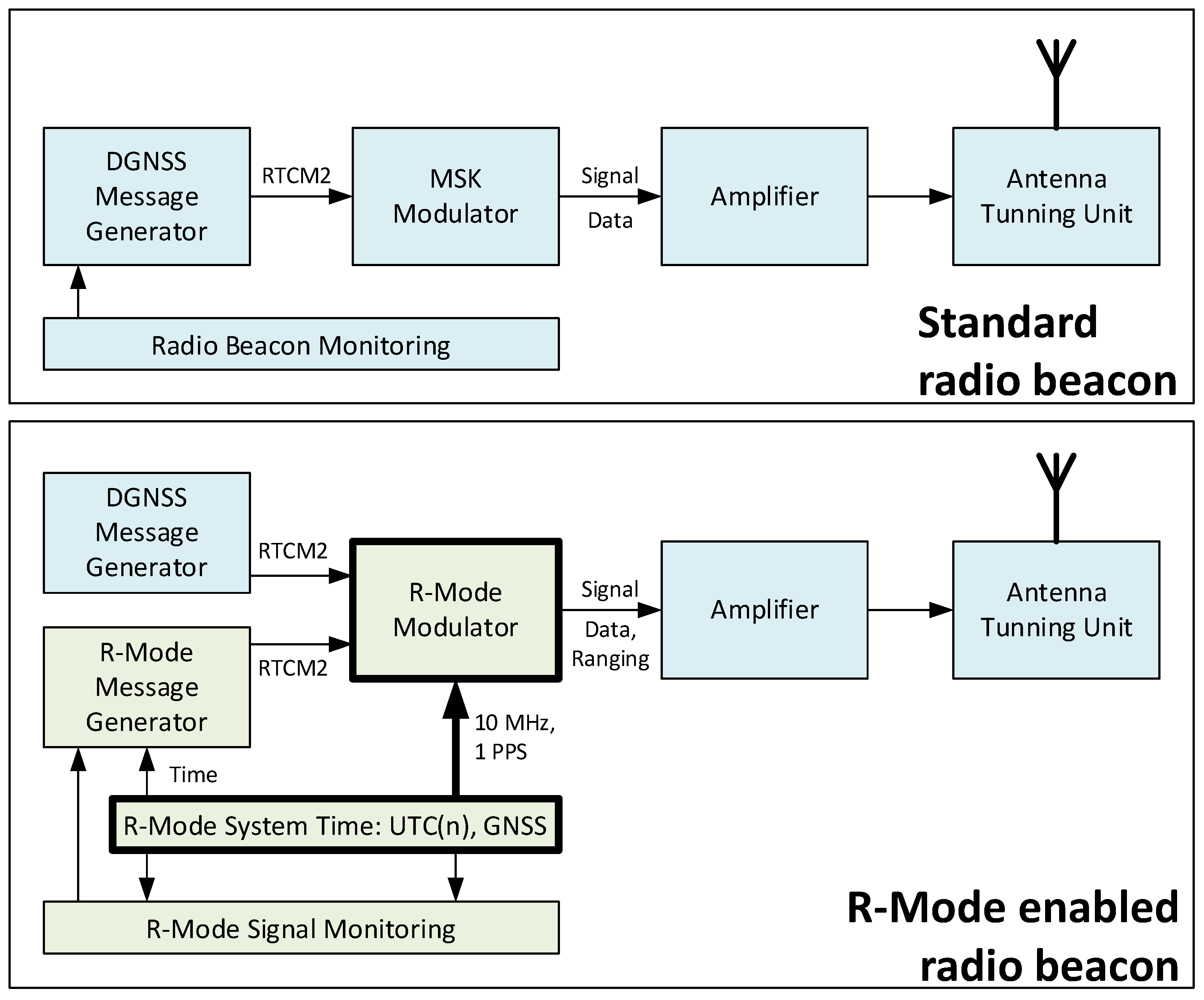
2. The MF R-Mode System
3. Mf Signal Impairments
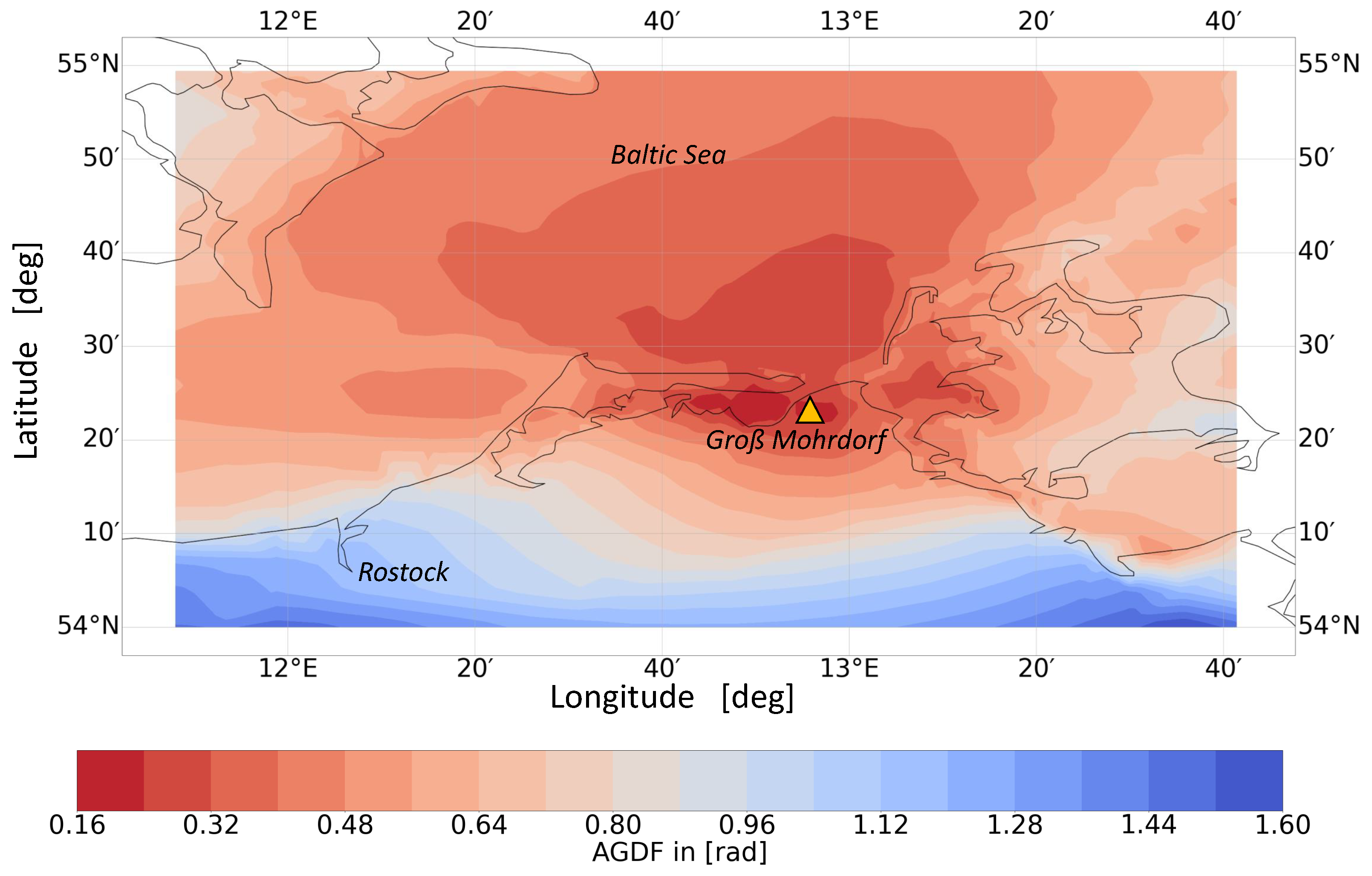
3.1. Atmospheric and Ground Delay Factor (AGDF)
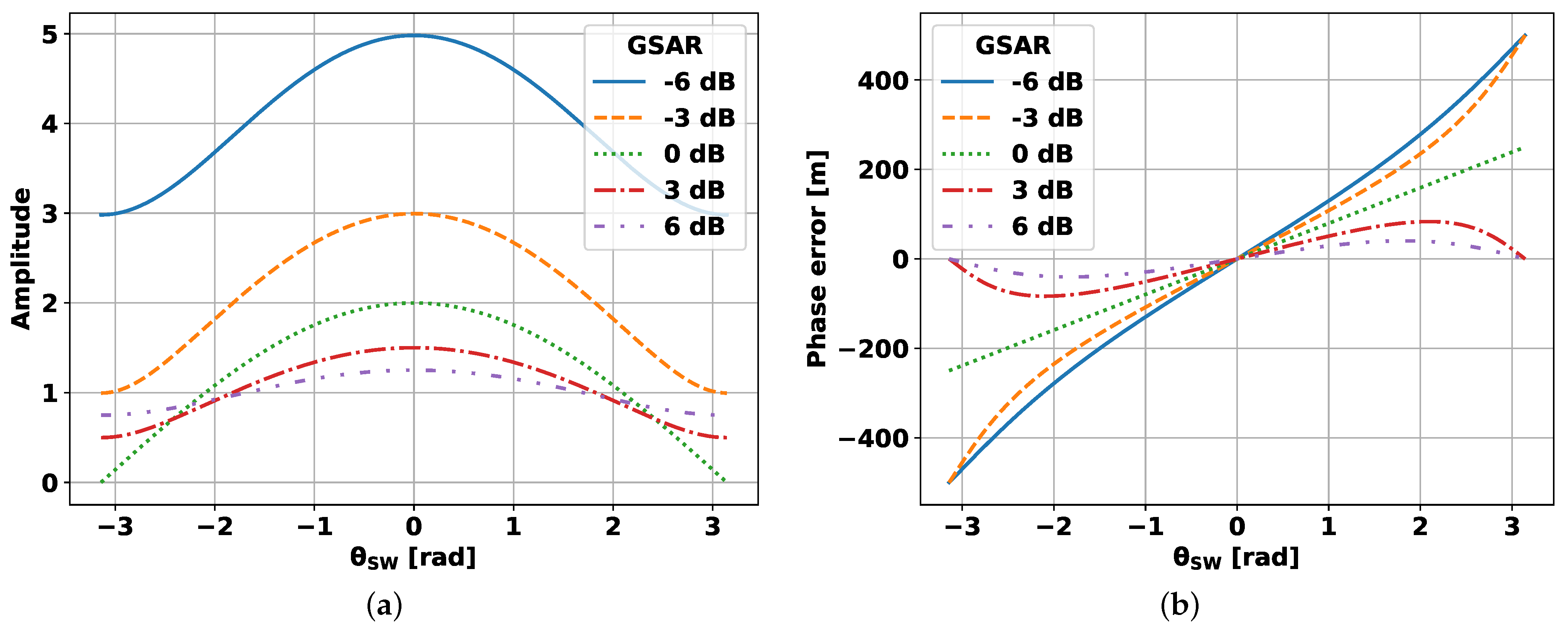
3.2. Sky-Wave Self-Interference
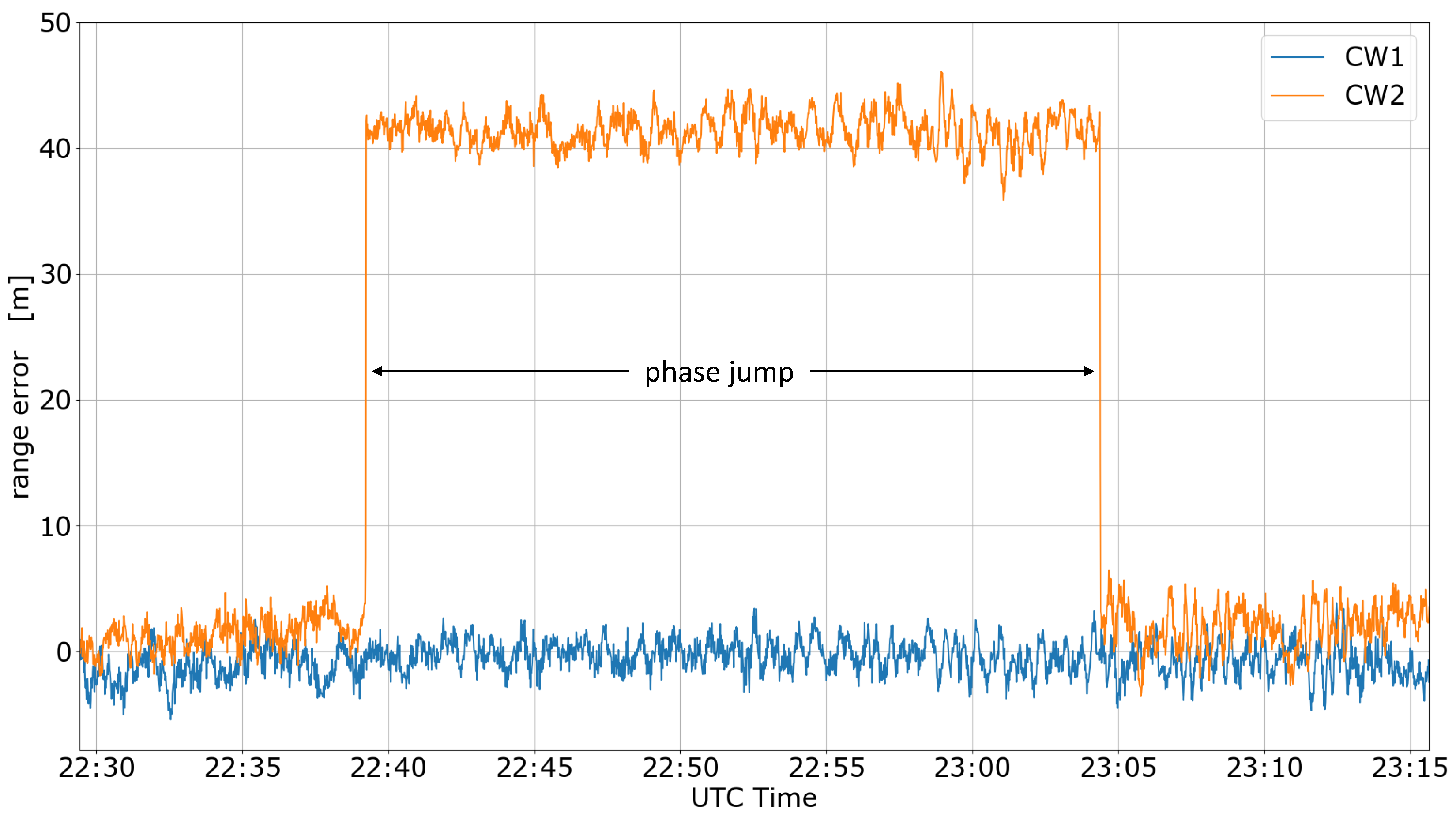
3.3. Transmitter Instability
4. Mf R-Mode System Accuracy: Results and Discussion
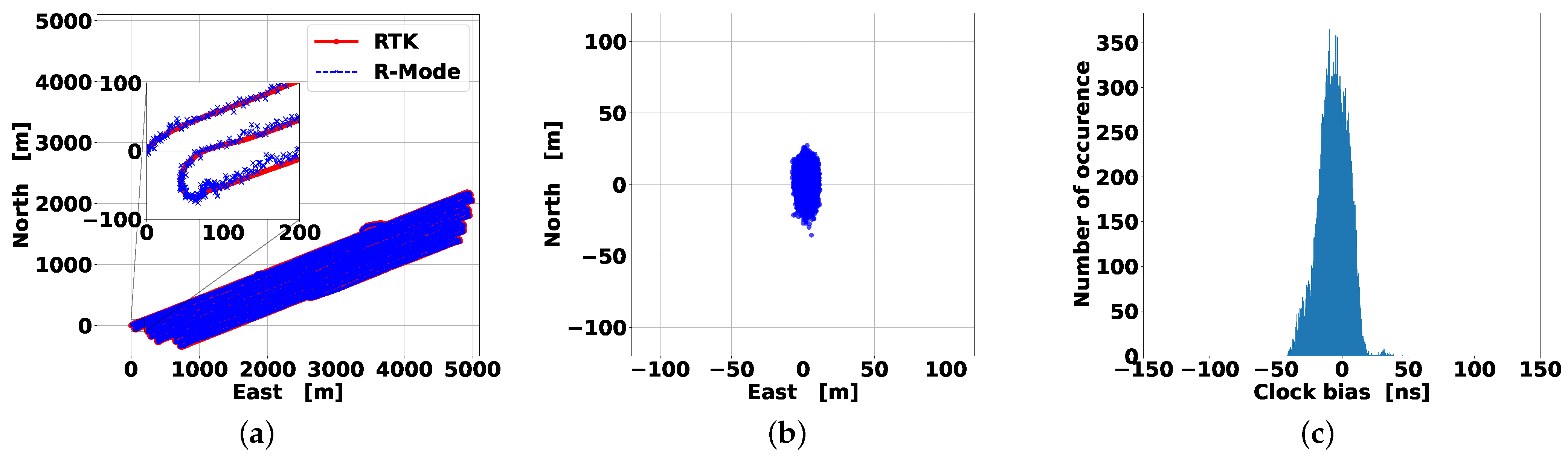
4.1. Daytime Results
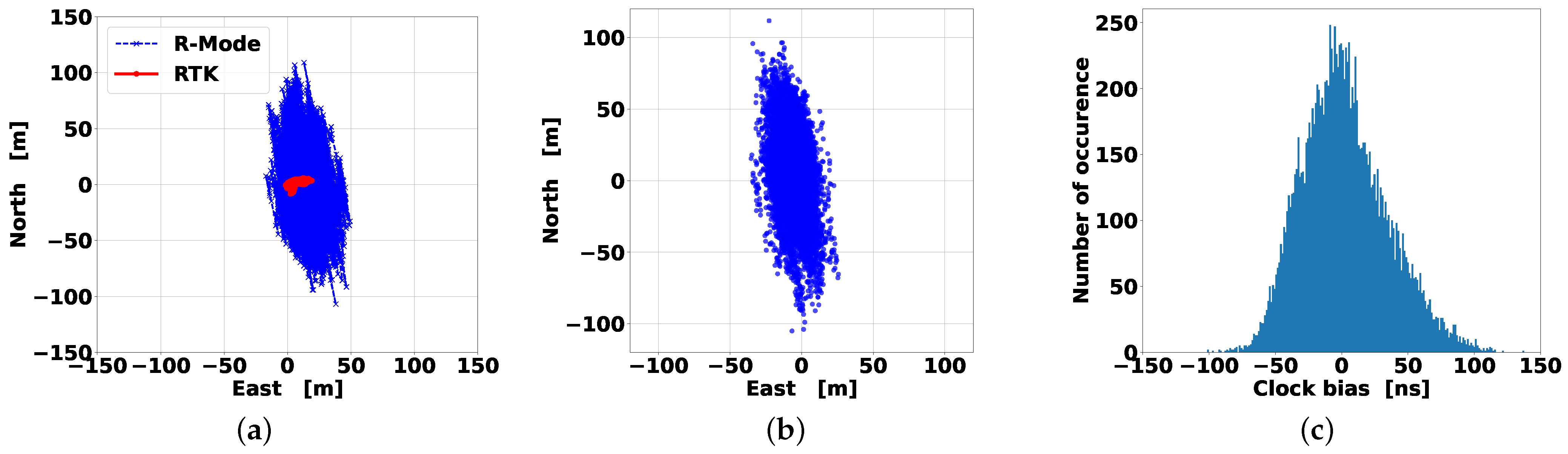
4.2. Night-Time Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGDF | Atmospheric and Ground Delay Factor |
| APNT | Alternative Position, Navigation and Timing |
| BSH | German Federal Maritime and Hydrographic Agency |
| CW | Continuous Wave |
| DGNSS | Differential Global Navigation Satellite System |
| DLR | German Aerospace Center |
| DOP | Dilution Of Precision |
| FDMA | Frequency Division Multiple Access |
| FFT | Fast Fourier transform |
| GNSS | Global Navigation Satellite system |
| GPS | Global Positioning System |
| GSAR | Ground-wave-to-Sky-wave Amplitude Ratio |
| HDOP | Horizontal Dilution Of Precision |
| IALA | International Association of Marine Aids to Navigation and Lighthouse Authorities |
| ITU | International Telecommunication Unit |
| LOS | Line-Of-Sight |
| MF | Medium Frequency |
| MSK | Minimum Shift Keying |
| OSNMA | Open Service Navigation Message Authentication |
| PNT | Position, Navigation and Timing |
| R-Mode | Ranging Mode |
| RTK | Real-Time Kinematic |
| SDR | Software-Defined Radio |
| UTC | Coordinated Universal Time |
| VDES | Very High Frequency Data Exchange System |
Appendix A
References
- EUSPA. EUSPA EO and GNSS Market Report; Technical Report; Publications Office of the European Union: Luxembourg, 2022; Issue 1. Available online: https://data.europa.eu/doi/10.2878/94903 (accessed on 21 December 2022).
- Volpe, J.A. Vulnerability Assessment of the Transportation Infrastructure Relying on Global Positioning System; Technical Report; Volpe National Transportation System Center: Cambridge, MA, USA, 2001.
- The Royal Accademy of Engineering. Global Navigation Space Systems: Reliance and Vulnerabilities; Technical Report; The Royal Accademy of Engineering: Edinburgh, UK, 2011. [Google Scholar]
- Dovis, F. GNSS Interference Threats and Countermeasures; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- EUSPA. Galileo Open Service Navigation Message Authentication (OSNMA): Info Note; Technical Report; Publications Office of the European Union: Luxembourg, 2021. Available online: https://data.europa.eu/doi/10.2878/49446 (accessed on 21 December 2022).
- Gewies, S.; Dammann, A.; Ziebold, R.; Bäckstedt, J.; Bronk, K.; Wereszko, B.; Rieck, C.; Gustafson, P.; Eliassen, C.G.; Hoppe, M.; et al. R-Mode testbed in the Baltic Sea. In Proceedings of the 19th IALA Conference, Incheon, Republic of Korea, 27 May–2 June 2018. [Google Scholar]
- Johnson, G.; Swaszek, P. Feasibility Study of R-Mode Using MF DGPS Transmissions; Technical Report; ACCSEAS Project: St Germain en Laye, France, 2014. [Google Scholar]
- Johnson, G.; Swaszek, P. Feasibility Study of R-Mode Using AIS Transmission: Investigation of Possible Methods to Implement a Precise GNSS Independent Timing Signal for AIS Transmission; Technical Report; ACCSEAS Project: St Germain en Laye, France, 2014. [Google Scholar]
- Johnson, G.; Dykstra, K.; Ordell, S.; Swaszek, P. R-Mode Positioning System Demonstration. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), St. Louis, MO, USA, 22–25 September 2020; Volume 202, pp. 839–855. [Google Scholar] [CrossRef]
- Johnson, G.W.; Swaszek, P.F.; Hoppe, M.; Grant, A.; Safar, J. Initial Results of MF-DGNSS R-Mode as an Alternative Position Navigation and Timing Service. In Proceedings of the 2017 International Technical Meeting of The Institute of Navigation, Monterey, CA, USA, 30 January–2 February 2017; pp. 1206–1226. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Rhee, J.H. Simulation of Medium-Frequency R-Mode Signal Strength. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Yeosu, Republic of Korea, 26–28 October 2022; pp. 1–3. [Google Scholar] [CrossRef]
- Jeong, S.; Son, P.W. Preliminary Analysis of Skywave Effects on MF DGNSS R-Mode Signals During Daytime and Nighttime. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Yeosu, Republic of Korea, 26–28 October 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Poppe, D.C. Coverage and Performance Prediction of DGPS Systems Employing Radiobeacon Transmissions. Ph.D. Thesis, Bangor University, Bangor, UK, 1995. [Google Scholar]
- Grundhöfer, L.; Rizzi, F.G.; Gewies, S.; Hoppe, M.; Bäckstedt, J.; Dziewicki, M.; Del Galdo, G. Positioning with medium frequency R-Mode. Navigation 2021, 68, 829–841. [Google Scholar] [CrossRef]
- Cueto-Felgueroso, G.; Martínez, J.; Blesa, S.; Moreno, G.; López, M.; Nieto, R.; Píriz, R.; Hoppe, M.; Gewies, S.; Callewaert, K.; et al. Galileo Timing for R-Mode—Testing Campaign. In Proceedings of the 35th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 439–456. [Google Scholar] [CrossRef]
- Subirana, J.; Zornoza, J.; Hernández-Pajares, M. GNSS Data Processing Volume I: Fundamentals and Algorithms; ESA Communications: Noordwijk, The Netherlands, 2013. [Google Scholar]
- Vincenty, T. Direct and inverse solutions of the geodesics on the ellipsoid with application of nested equations. Surv. Rev. 1975, 23, 88–93. [Google Scholar] [CrossRef]
- ITU. Ionosphere and Its Effects on Radiowave Propagation; International Telecommunication Union: Geneva, Switzerland, 1998. [Google Scholar]
- Pressey, B.G.; Ashwell, G.E.; Fowler, C.S. The measurement of the phase velocity of ground-wave propagation at low frequencies over a land path. Proc. IEE Part III Radio Commun. Eng. 1953, 100, 73–84. [Google Scholar] [CrossRef]
- Rizzi, F.G.; Hehenkamp, N.; Grundhöfer, L.; Gewies, S. Improving MF R-Mode ranging performance with measurement-based correction factors. In Proceedings of the European Workshop on Maritime Systems Resilience and Security, Bremerhaven, Germany, 20 June 2022. [Google Scholar] [CrossRef]
- ITU. ITU-R P.832-4 World Atlas of Ground Conductivities; International Telecommunication Union: Geneva, Switzerland, 2015. [Google Scholar]
- Rotheram, S. Ground-wave propagation. Part 1: Theory for short distances. IEE Proc. Commun. Radar Signal Process. 1981, 128, 275–284. [Google Scholar] [CrossRef]
- Rotheram, S. Ground-wave propagation. Part 2: Theory for medium and long distances and reference propagation curves. IEE Proc. Commun. Radar Signal Process. 1981, 128, 285–295. [Google Scholar] [CrossRef]
- Wait, J.R. The ancient and modern history of EM ground-wave propagation. IEEE Antennas Propag. Mag. 1988, 40, 7–24. [Google Scholar] [CrossRef]
- Millington, G. Ground-wave propagation over an inhomogeneous smooth earth. Proc. IEE-Part III Radio Commun. Eng. 1949, 96, 53–64. [Google Scholar] [CrossRef]
- Grundhöfer, L.; Gewies, S.; Hehenkamp, N.; Del Galdo, G. Redesigned Waveforms in the Maritime Medium Frequency Bands. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 827–831. [Google Scholar] [CrossRef]
- Grundhöfer, L.; Gewies, S. Equivalent Circuit for Phase Delay in a Medium Frequency Antenna. In Proceedings of the 2020 European Navigation Conference (ENC), Dresden, Germany, 23–24 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Hemisphere. Atlas GNSS Global Correction Service. Available online: https://www.hemispheregnss.com/product/atlas-gnss-global-correction-service/ (accessed on 22 January 2023).
- IALA. Recommendation R-129 GNSS Vulnerability and Mitigation Measures, 3.1 ed.; IALA: St Germain en Laye, France, 2012. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
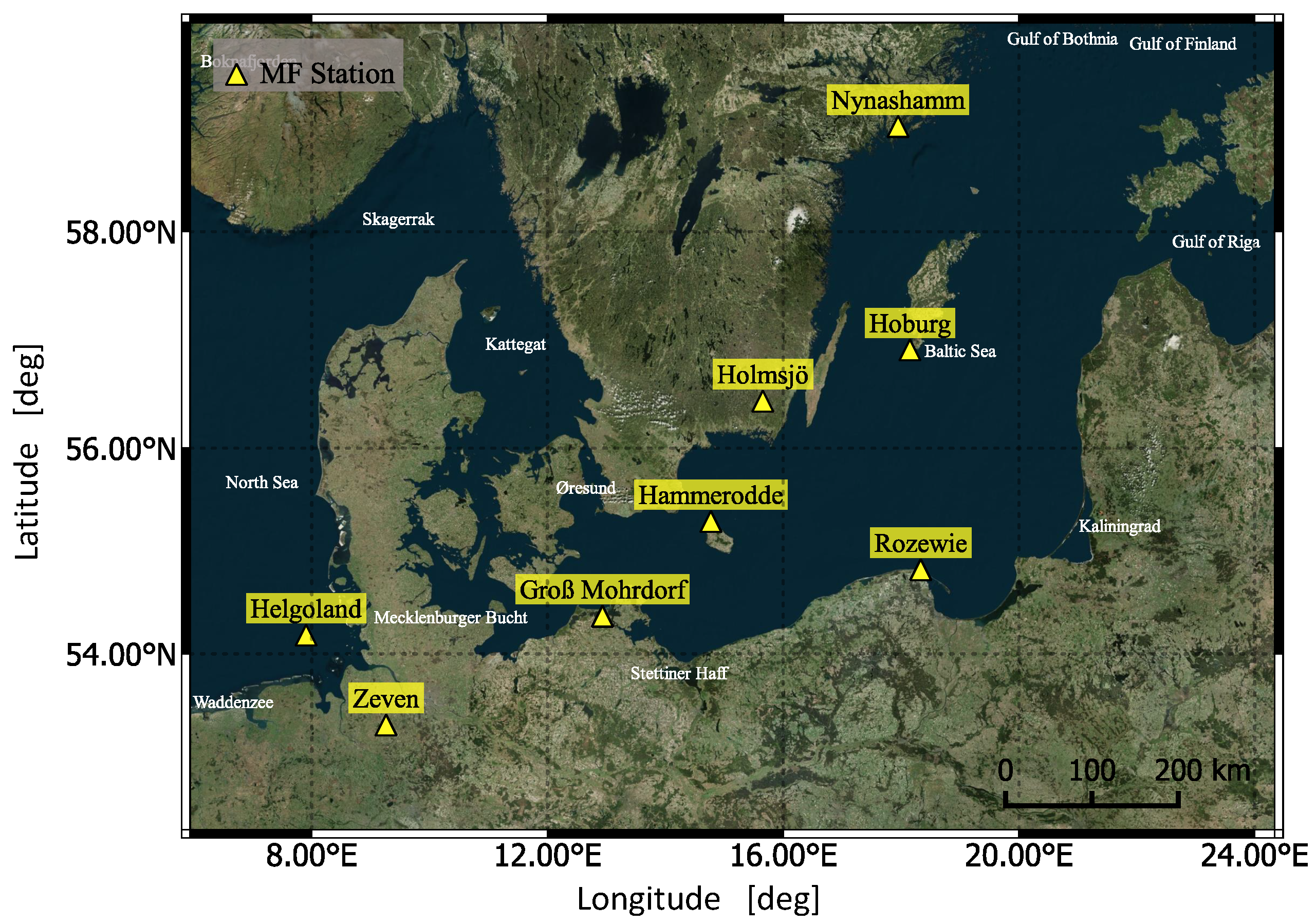
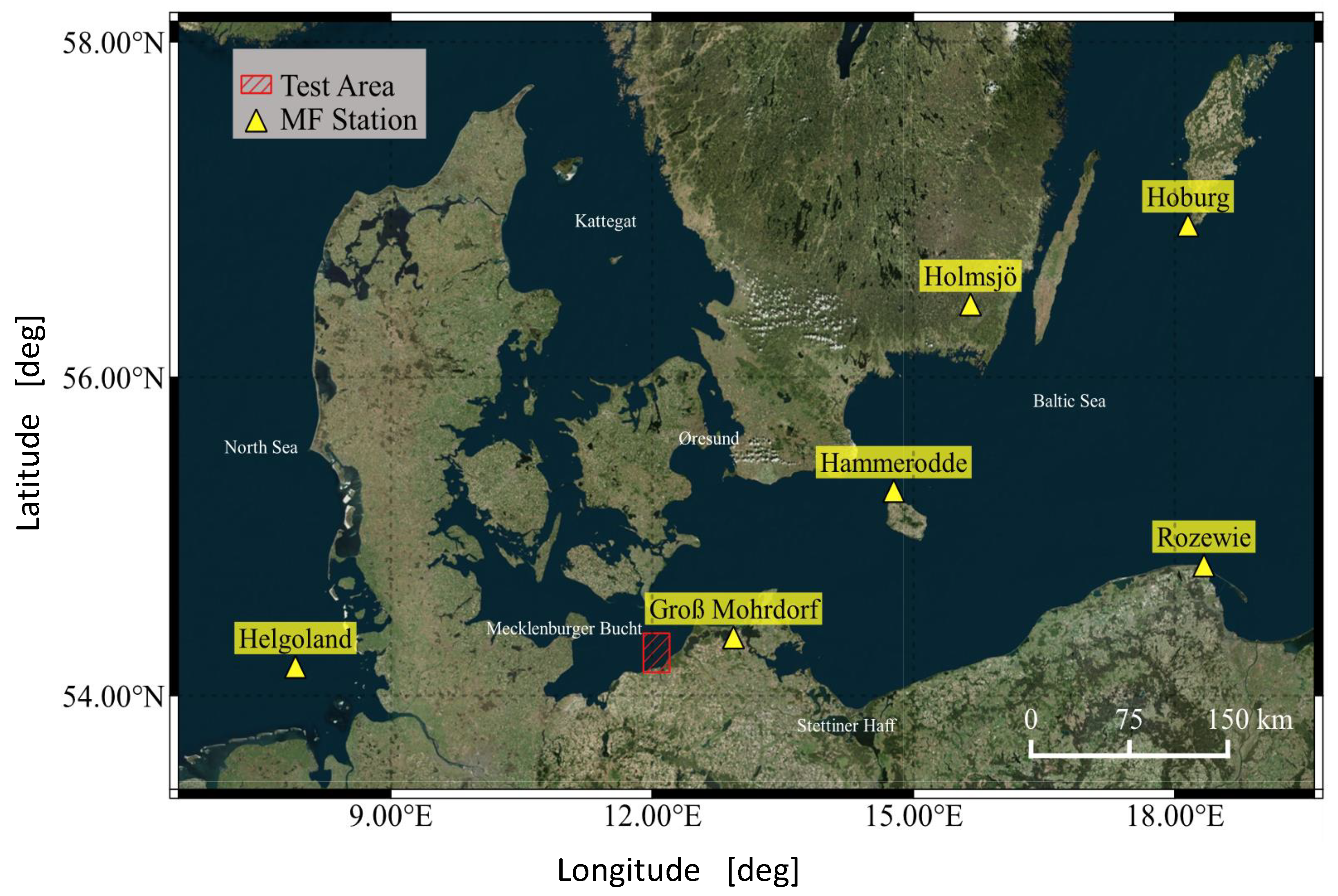
| Station Name | Lat [deg] | Lon [deg] | Distance [km] |
|---|---|---|---|
| Hoburg | 56.9209 | 18.1520 | 486 |
| Rozewie | 54.8308 | 18.3347 | 414 |
| Holmsjö | 56.4440 | 15.6551 | 334 |
| Helgoland | 54.1859 | 7.9052 | 267 |
| Hammerodde | 55.2981 | 14.7738 | 211 |
| Groß Mohrdorf | 53.3740 | 12.9344 | 62 |
| Hoburg | Rozewie | Holmsjö | Helgoland | Hammerodde | Groß Mohrdorf | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| CW1 | CW2 | CW1 | CW2 | CW1 | CW2 | CW1 | CW2 | CW1 | CW2 | CW1 | CW2 |
| h | h | h | uh | h | h | h | uh | h | uh | h | h |
| Hoburg | Rozewie | Holmsjö | Helgoland | Hammerodde | Groß Mohrdorf | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| CW1 | CW2 | CW1 | CW2 | CW1 | CW2 | CW1 | CW2 | CW1 | CW2 | CW1 | CW2 |
| uh | uh | uh | uh | h | h | h | h | uh | uh | h | uh |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rizzi, F.G.; Grundhöfer, L.; Gewies, S.; Ehlers, T. Performance Assessment of the Medium Frequency R-Mode Baltic Testbed at Sea near Rostock. Appl. Sci. 2023, 13, 1872. https://doi.org/10.3390/app13031872
Rizzi FG, Grundhöfer L, Gewies S, Ehlers T. Performance Assessment of the Medium Frequency R-Mode Baltic Testbed at Sea near Rostock. Applied Sciences. 2023; 13(3):1872. https://doi.org/10.3390/app13031872
Chicago/Turabian StyleRizzi, Filippo Giacomo, Lars Grundhöfer, Stefan Gewies, and Tobias Ehlers. 2023. "Performance Assessment of the Medium Frequency R-Mode Baltic Testbed at Sea near Rostock" Applied Sciences 13, no. 3: 1872. https://doi.org/10.3390/app13031872