
An Experimental Setup to Detect the Crack Fault of Asymmetric Rotors Based on a Deep Learning Method

Abstract
:1. Introduction
2. Fault Detection Method
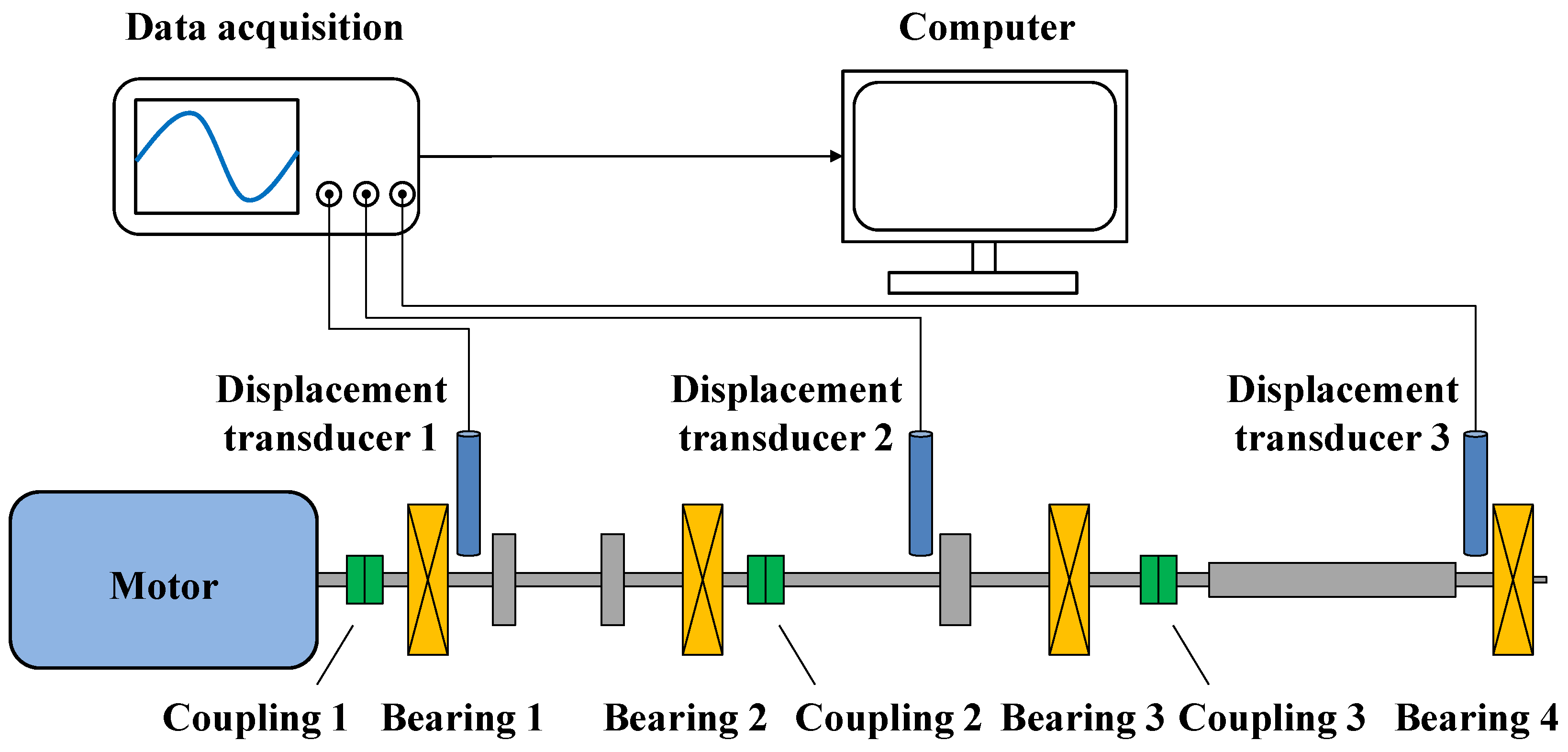
2.1. Signals Collection
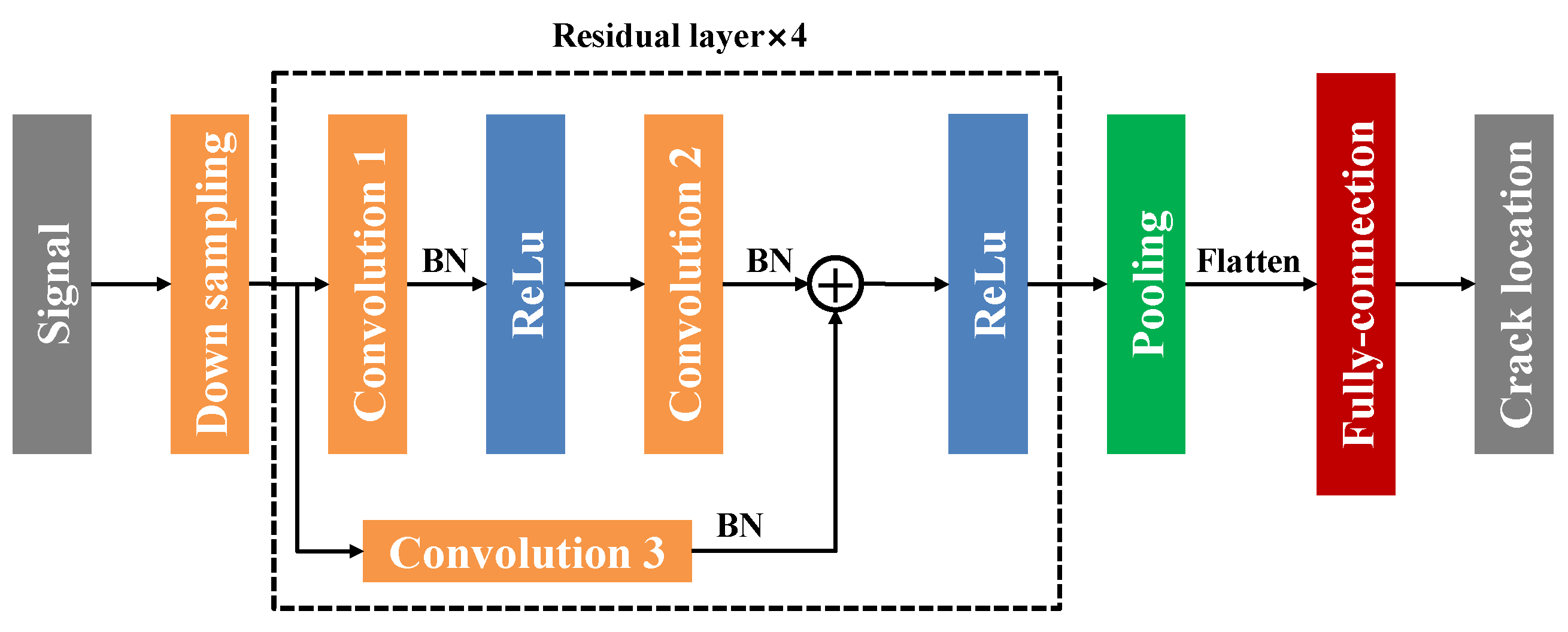
2.2. Convolutional Layer
2.3. Fully Connected Layer
2.4. Loss Function
2.5. Optimization Algorithm
3. The Evaluation Indicators
4. Results and Discussion
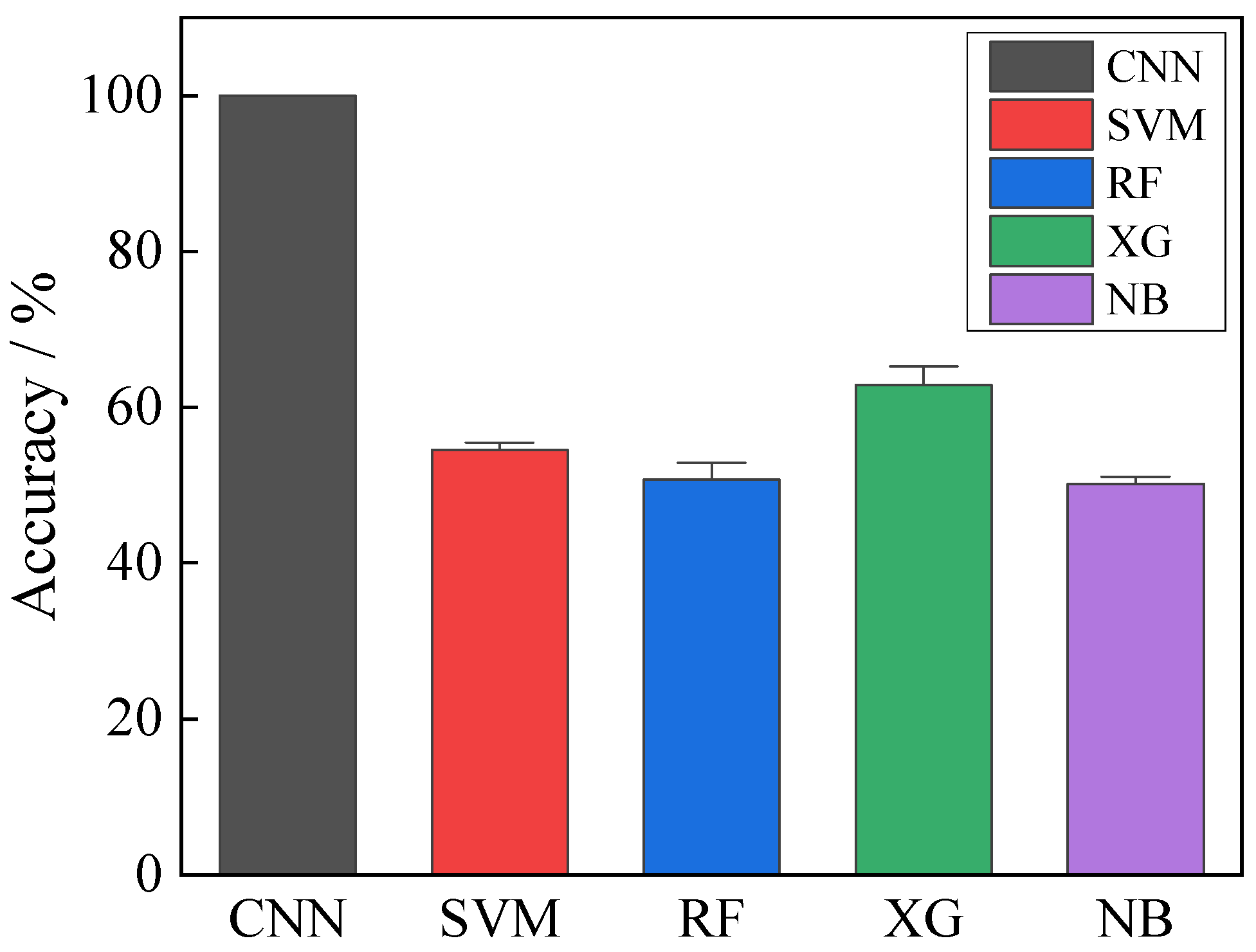
4.1. Evaluation of the Proposed Method
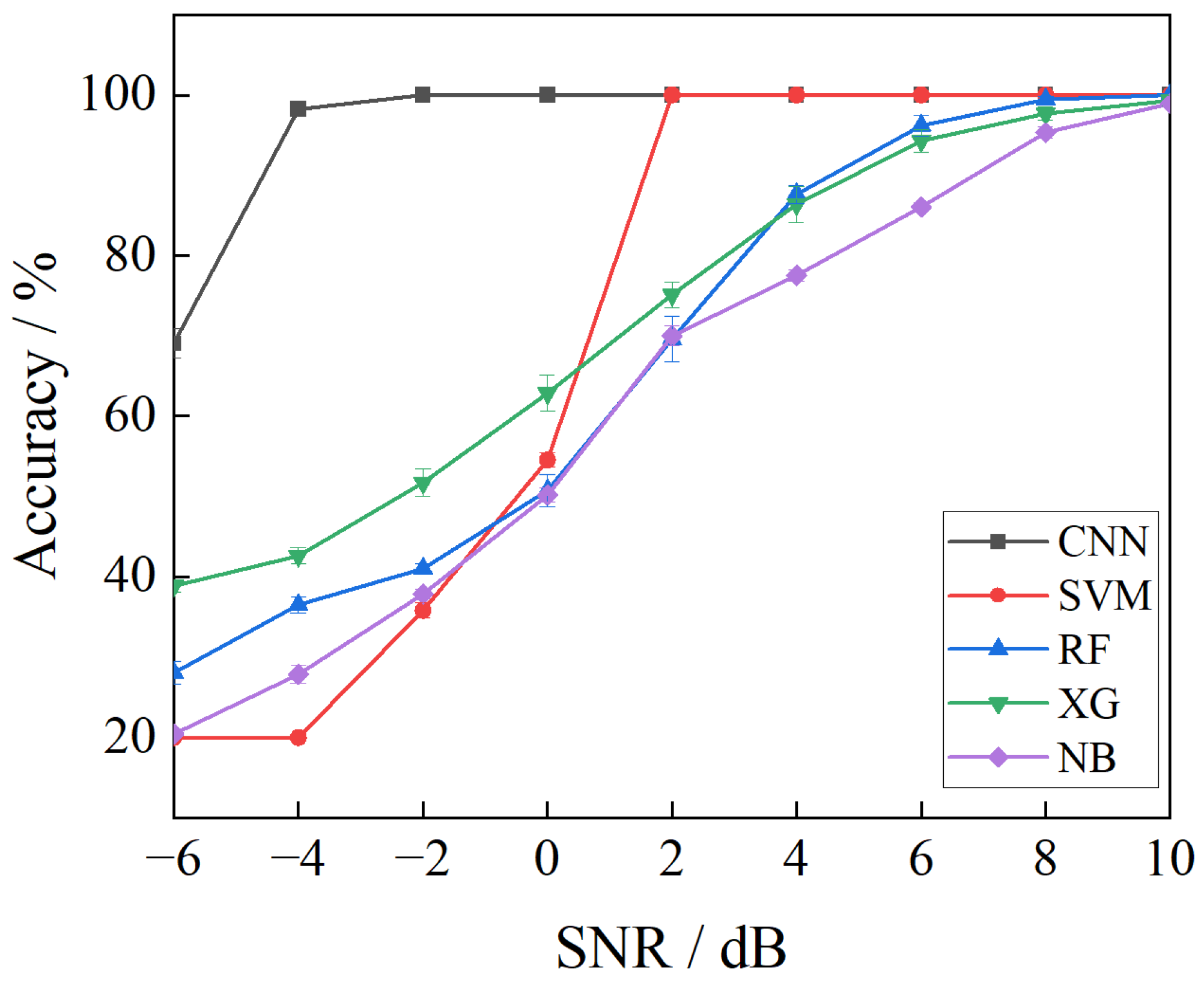
4.2. Impact of SNR
4.3. Effect of the Number of Training Samples
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bachschmid, N.; Pennacchi, P.; Vania, A. Identification of multiple faults in rotor systems. J. Sound Vib. 2002, 254, 327–366. [Google Scholar] [CrossRef] [Green Version]
- Friswell, M.I.; Penny, J.E.T.; Garvey, S.D.; Lees, A.W. Dynamics of Rotating Machines; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Sekhar, A. Crack identification in a rotor system: A model-based approach. J. Sound Vib. 2003, 270, 887–902. [Google Scholar] [CrossRef]
- Sekhar, A. Model-based identification of two cracks in a rotor system. Mech. Syst. Signal Process. 2004, 18, 977–983. [Google Scholar] [CrossRef]
- Chen, X.F.; Bing, L.; Qiao, H. Crack Fault Diagnosis Based on Wavelet Finite Elements. J. Xi’an Jiaotong Univ. 2004, 38, 295–298. [Google Scholar]
- Babu, T.R.; Sekhar, A. Detection of two cracks in a rotor-bearing system using amplitude deviation curve. J. Sound Vib. 2008, 314, 457–464. [Google Scholar] [CrossRef]
- Varney, P.; Green, I. Rotordynamic Crack Diagnosis: Distinguishing Crack Depth and Location. J. Eng. Gas Turbines Power 2013, 135, 112101. [Google Scholar] [CrossRef]
- Haji, Z.N.; Oyadiji, S.O. The use of roving discs and orthogonal natural frequencies for crack identification and location in rotors. J. Sound Vib. 2014, 333, 6237–6257. [Google Scholar] [CrossRef]
- Söffker, D.; Wei, C.; Wolff, S.; Saadawia, M.-S. Detection of rotor cracks: Comparison of an old model-based approach with a new signal-based approach. Nonlinear Dyn. 2015, 83, 1153–1170. [Google Scholar] [CrossRef]
- Gupta, R.B.; Singh, S.K. Detection of crack and unbalancing in a rotor system using artificial neural network. In Proceedings of the First International Conference on Future Learning Aspects for Mechanical Engineering, Noida, India, 3–5 October 2018; pp. 607–618. [Google Scholar]
- Sathujoda, P. Detection of a slant crack in a rotor bearing system during shut-down. Mech. Based Des. Struct. Mach. 2020, 48, 266–276. [Google Scholar] [CrossRef]
- Bachschmid, N.; Pennacchi, P.; Tanzi, E.; Vania, A. Identification of transverse crack location and depth in rotor systems. Meccanica 2000, 35, 563–582. [Google Scholar] [CrossRef] [Green Version]
- Pennacchi, P.; Bachschmid, N.; Vania, A. A model-based identification method of transverse cracks in rotating shafts suitable for industrial machines. Mech. Syst. Signal Process. 2006, 20, 2112–2147. [Google Scholar] [CrossRef]
- Yao, H.; Li, H. Diagnoses of coupling fault of crack and rub-impact in rotor systems. J. Vib. Eng. 2006, 19, 307–312. [Google Scholar]
- Dong, H.; Chen, X.; Li, B.; Qi, K.; He, Z. Rotor crack detection based on high-precision modal parameter identification method and wavelet finite element model. Mech. Syst. Signal Process. 2009, 23, 869–883. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional Neural Network Based Fault Detection for Rotating Machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Yuan, Z.; Zhang, L.; Duan, L. A novel fusion diagnosis method for rotor system fault based on deep learning and multi-sourced heterogeneous monitoring data. Meas. Sci. Technol. 2018, 29, 115005. [Google Scholar] [CrossRef]
- Han, T.; Liu, C.; Yang, W.; Jiang, D. Deep transfer network with joint distribution adaptation: A new intelligent fault diagnosis framework for industry application. ISA Trans. 2020, 97, 269–281. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Lei, Y.; Jia, F.; Xing, S. An intelligent fault diagnosis approach based on transfer learning from laboratory bearings to locomotive bearings. Mech. Syst. Signal Process. 2019, 122, 692–706. [Google Scholar] [CrossRef]
- Wen, L.; Gao, L.; Li, X. A New Deep Transfer Learning Based on Sparse Auto-Encoder for Fault Diagnosis. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 136–144. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, G.; Liu, T.; Xie, Y.; Zhang, D. A sub-domain adaptive transfer learning base on residual network for bearing fault diagnosis. J. Vib. Control. 2021, 29, 105–117. [Google Scholar] [CrossRef]
- Ren, Z.; Zhu, Y.; Yan, K.; Chen, K.; Kang, W.; Yue, Y.; Gao, D. A novel model with the ability of few-shot learning and quick updating for intelligent fault diagnosis. Mech. Syst. Signal Process. 2020, 138, 106608. [Google Scholar] [CrossRef]
- Zhang, A.; Li, S.; Cui, Y.; Yang, W.; Dong, R.; Hu, J. Limited Data Rolling Bearing Fault Diagnosis With Few-Shot Learning. IEEE Access 2019, 7, 110895–110904. [Google Scholar] [CrossRef]
- Zhu, X.; Hou, D.; Zhou, P.; Han, Z.; Yuan, Y.; Zhou, W.; Yin, Q. Rotor fault diagnosis using a convolutional neural network with symmetrized dot pattern images. Measurement 2019, 138, 526–535. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, X.; Huang, H.; Xiang, J. A hybrid of FEM simulations and generative adversarial networks to classify faults in rotor-bearing systems. ISA Trans. 2020, 108, 356–366. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Nath, A.G.; Udmale, S.S.; Singh, S.K. Role of artificial intelligence in rotor fault diagnosis: A comprehensive review. Artif. Intell. Rev. 2020, 54, 2609–2668. [Google Scholar] [CrossRef]
- Dou, Z.; Sun, Y.; Wu, Z.; Wang, T.; Fan, S.; Zhang, Y. The Architecture of Mass Customization-Social Internet of Things System: Current Research Profile. ISPRS Int. J. Geo-Inf. 2021, 10, 653. [Google Scholar] [CrossRef]
- Zhu, J.; Gong, Z.; Sun, Y.; Dou, Z. Chaotic neural network model for SMISs reliability prediction based on interdependent network SMISs reliability prediction by chaotic neural network. Qual. Reliab. Eng. Int. 2020, 37, 717–742. [Google Scholar] [CrossRef]
- Liu, K.; Yu, Q.; Liu, Y.; Yang, J.; Yao, Y. Convolutional Graph Thermography for Subsurface Defect Detection in Polymer Composites. IEEE Trans. Instrum. Meas. 2022, 71, 1. [Google Scholar] [CrossRef]
- Liu, K.; Zheng, M.; Liu, Y.; Yang, J.; Yao, Y. Deep Autoencoder Thermography for Defect Detection of Carbon Fiber Composites. IEEE Trans. Ind. Informatics 2022. [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. In Proceedings of the International Conference on Learning Representations, San Juan, Puerto Rico, 2–4 May 2016. [Google Scholar]
- Ganin, Y.; Ustinova, E.; Ajakan, H.; Germain, P.; Larochelle, H.; Laviolette, F.; Marchand, M.; Lempitsky, V. Domain-Adversarial Training of Neural Networks. J. Mach. Learn. Res. 2016, 17, 1–35. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Numbering | Layers | Kernel Size | Stride | Channels | Output Size (Width × Depth) |
|---|---|---|---|---|---|
| 1 | Down-sampling | 64 × 1 | 8 × 1 | 32 | 256 × 32 |
| 2 | Residual layer 1 | 32 | 128 × 32 | ||
| 3 | Residual layer 2 | 64 | 64 × 64 | ||
| 4 | Residual layer 3 | 128 | 32 × 128 | ||
| 5 | Residual layer 4 | 256 | 16 × 256 | ||
| 6 | Pooling | 4 × 1 | 4 × 1 | 256 | 4 × 256 |
| 7 | Flatten | - | - | - | 1024 |
| 8 | Fully connected | 1024 | - | 1 | 1024 × 1 |
| 9 | Softmax | 5 | - | 1 | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Zheng, Z.; Guo, D.; Liu, T.; Xie, Y.; Zhang, D. An Experimental Setup to Detect the Crack Fault of Asymmetric Rotors Based on a Deep Learning Method. Appl. Sci. 2023, 13, 1327. https://doi.org/10.3390/app13031327
Wang C, Zheng Z, Guo D, Liu T, Xie Y, Zhang D. An Experimental Setup to Detect the Crack Fault of Asymmetric Rotors Based on a Deep Learning Method. Applied Sciences. 2023; 13(3):1327. https://doi.org/10.3390/app13031327
Chicago/Turabian StyleWang, Chongyu, Zhaoli Zheng, Ding Guo, Tianyuan Liu, Yonghui Xie, and Di Zhang. 2023. "An Experimental Setup to Detect the Crack Fault of Asymmetric Rotors Based on a Deep Learning Method" Applied Sciences 13, no. 3: 1327. https://doi.org/10.3390/app13031327