
Optimization Strategy for Output Voltage of CCM Flyback Converter Based on Linear Active Disturbance Rejection Control
Abstract
:1. Introduction
2. Small-Signal Model
3. Parameter Design of Anti Disturbance Voltage Control System
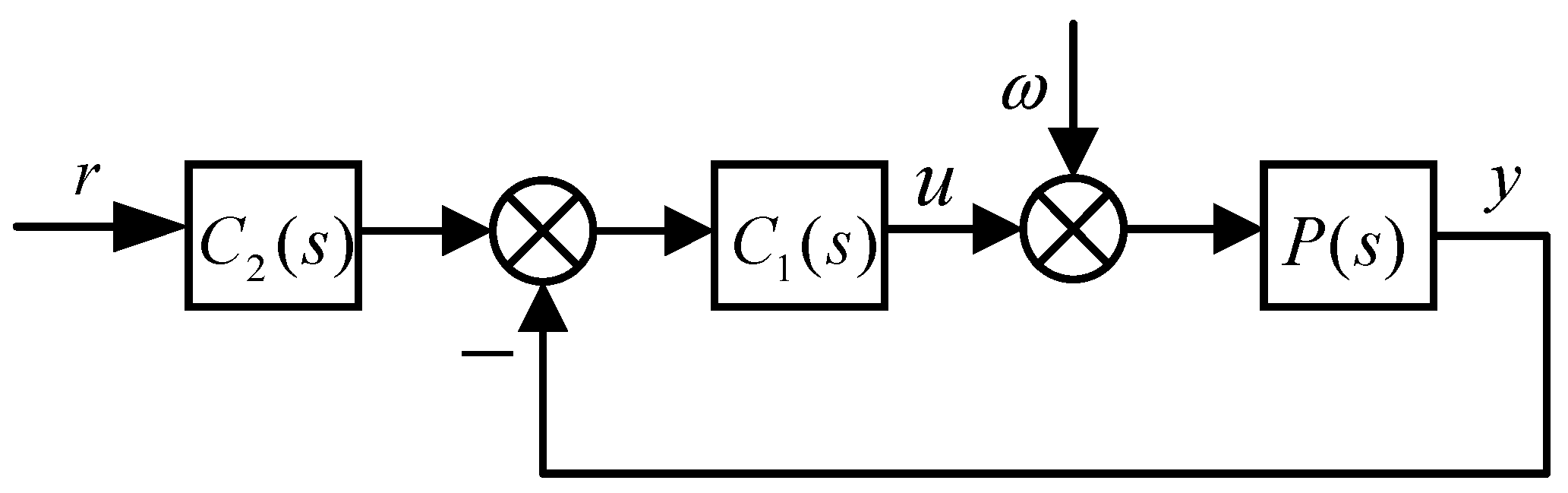
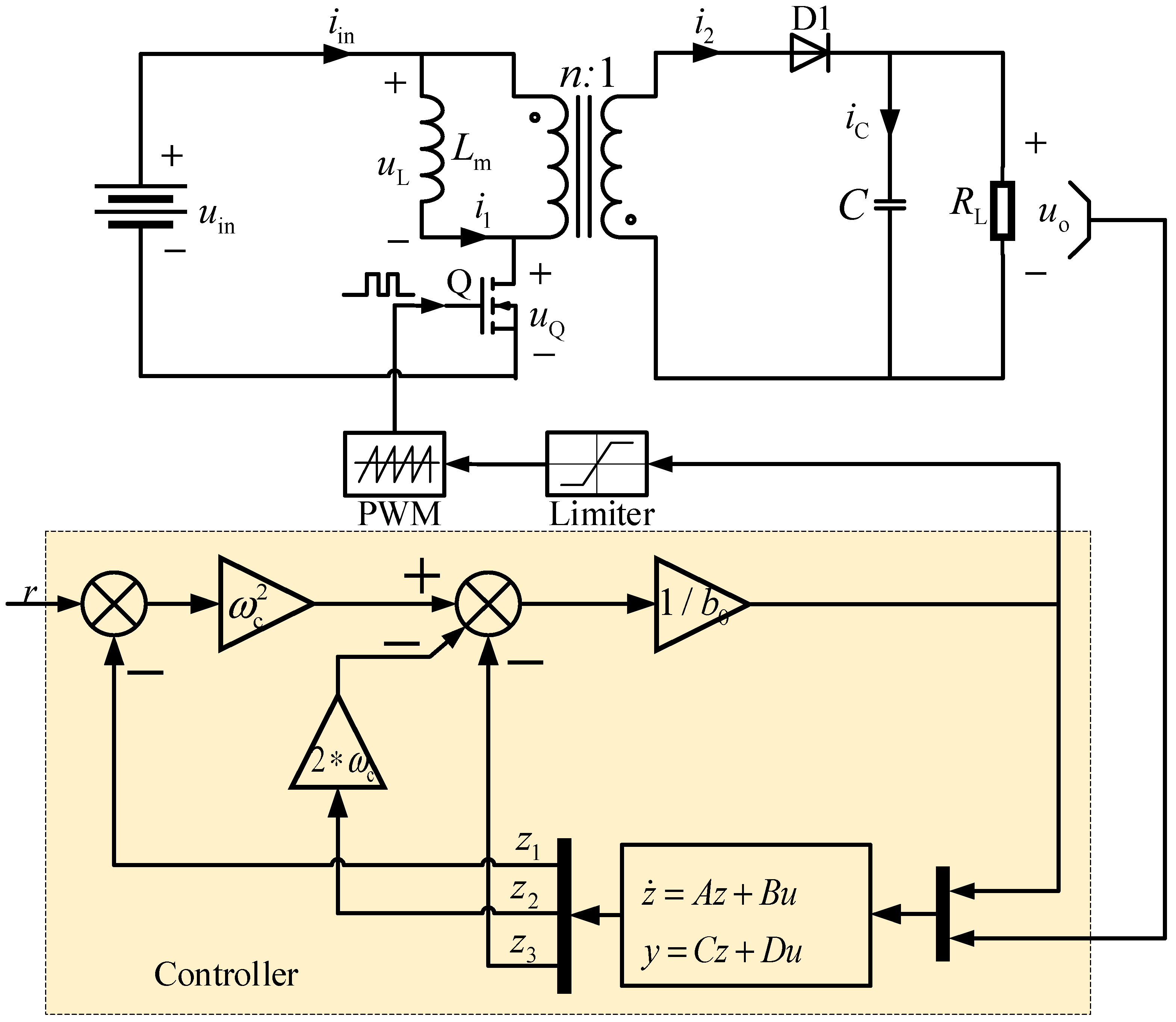
3.1. LADRC Basic Framework
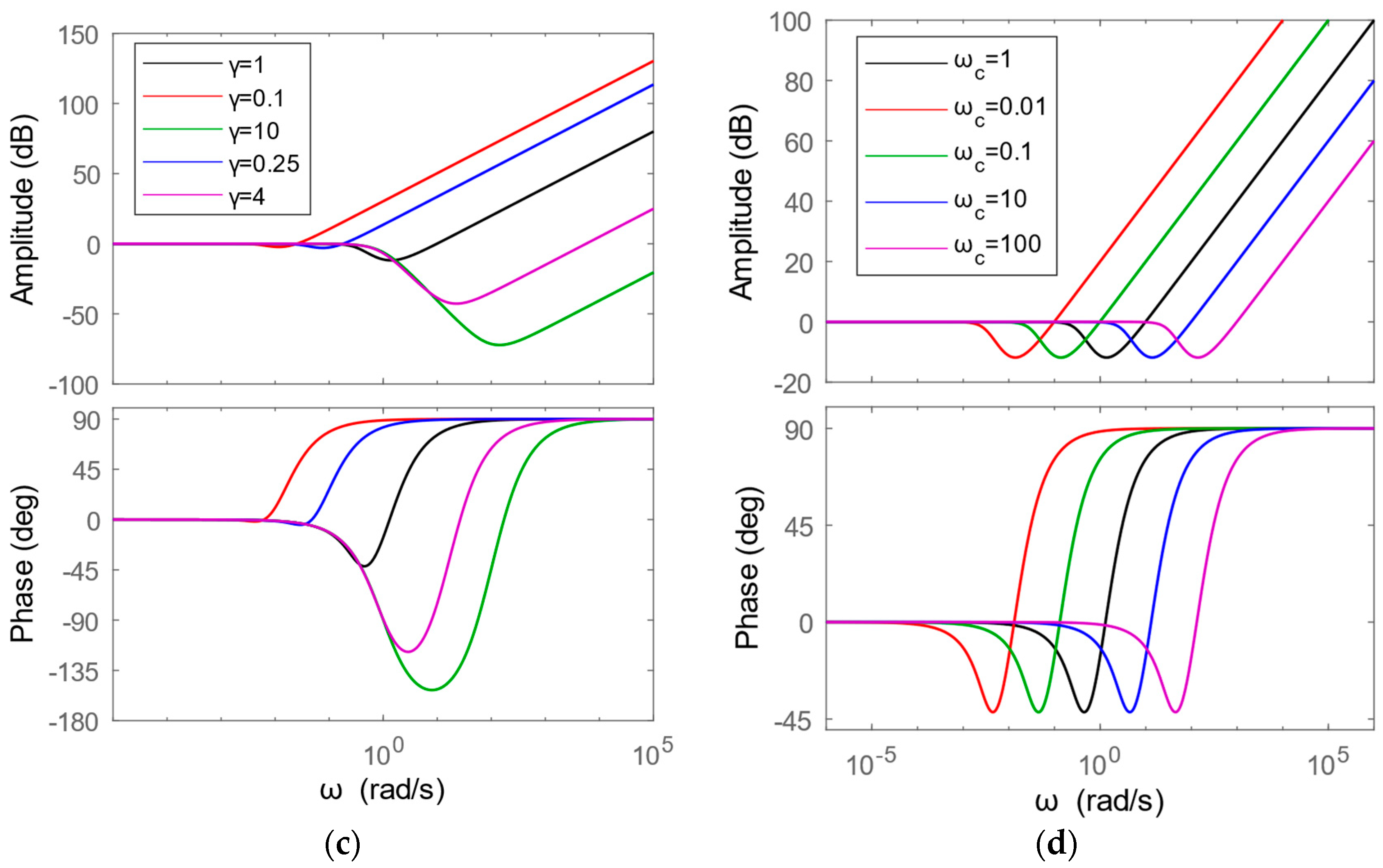
3.2. Parameter Design of Second-Order LADRC System
4. Simulation and Experimental Validation
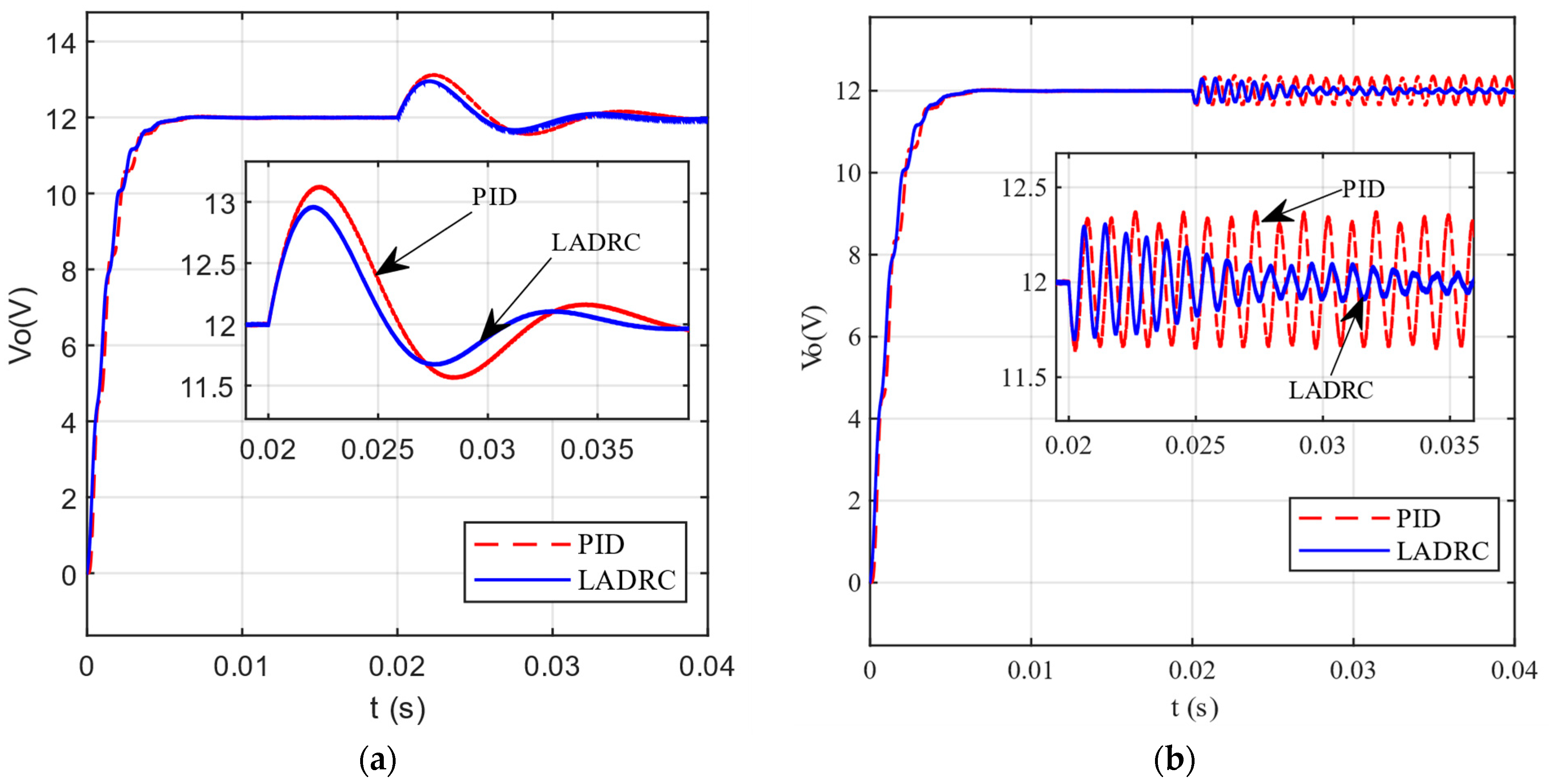
4.1. Comparison and Verification of Simulation Results
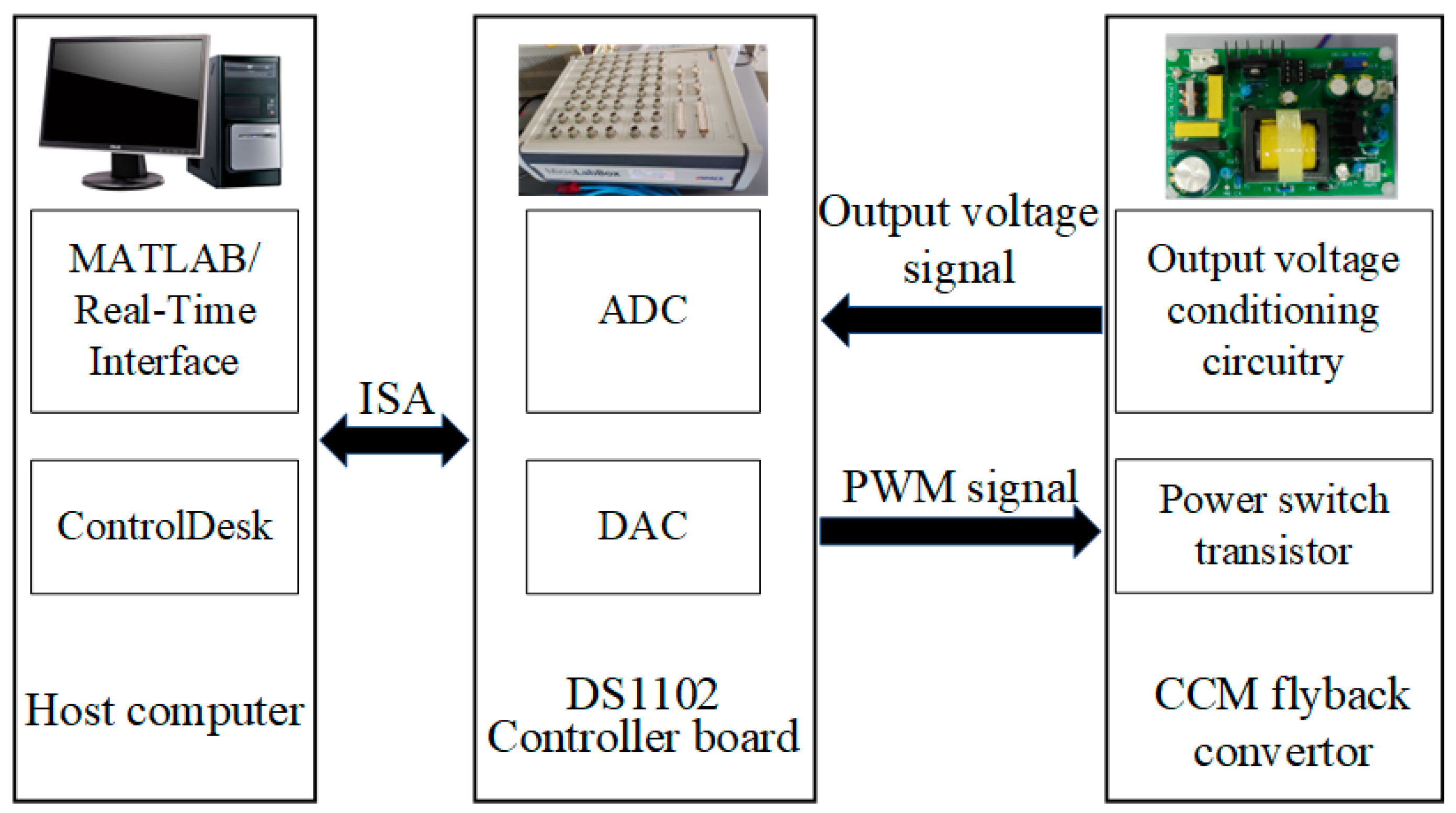
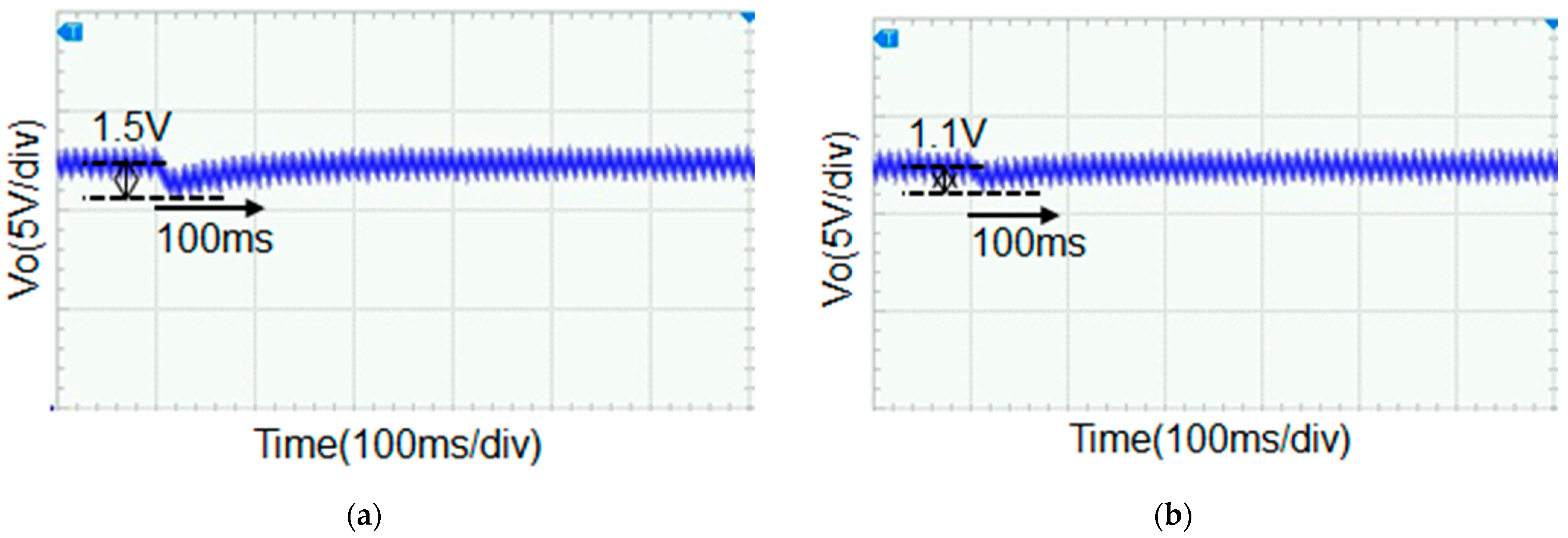
4.2. Comparative Verification of Experimental Results
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, S.; Kou, X.; Wang, C.; Sun, W.; Shi, L. New Digital Control Method for Improving Dynamic Response of Synchronous Rectified PSR Flyback Converter with CCM and DCM Modes. IEEE Trans. Power Electron. 2020, 35, 12347–12358. [Google Scholar] [CrossRef]
- Qian, Q.; Xu, S.; Xu, S.; Liu, Q.; Ding, S.; Gu, C.; Zhou, Z.; Yu, L.; Lu, S.; Sun, W. High Precision Primary Side Regulation Constant Voltage Control Method for Primary and Secondary Resonant Active Clamp Flyback Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 6985–6999. [Google Scholar] [CrossRef]
- Tang, C.Y.; Lin, W.Z.; Tan, Y.C. An Active Clamp Flyback Converter with High Precision Primary-Side Regulation Strategy. IEEE Trans. Power Electron. 2020, 37, 10281–10289. [Google Scholar] [CrossRef]
- Dong, H.; Xie, X.; Zhang, L. A New Primary PWM Control Strategy for CCM Synchronous Rectification Flyback Converter. IEEE Trans. Power Electron. 2020, 35, 4457–4461. [Google Scholar] [CrossRef]
- Xu, S.; Shen, Q.; Wang, C.; Ding, D.; Sun, W. A Digital Control Scheme for PSR Flyback Converter in CCM and DCM. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2837–2849. [Google Scholar] [CrossRef]
- Ravi, V.; Lakshminarasamma, N. Modeling, Analysis, and Implementation of High Voltage Low Power Flyback Converter Feeding Resistive Loads. IEEE Trans. Ind. Appl. 2018, 54, 4682–4695. [Google Scholar] [CrossRef]
- Yang, J.W.; Do, H.L. Soft-Switching Dual-Flyback DC–DC Converter with Improved Efficiency and Reduced Output Ripple Current. IEEE Trans. Ind. Electron. 2017, 64, 3587–3594. [Google Scholar] [CrossRef]
- Lin, Q.; He, Y.; Mei, X. Design and Research of Charge-Controlled Flyback Converter. Chin. J. Electron Devices 2020, 43, 280–284. [Google Scholar]
- Zhu, Z.; Wu, Q.; Wang, Z. Self-Compensating OCP Control Scheme for Primary-Side Controlled Flyback AC/DC Converters. IEEE Trans. Power Electron. 2017, 32, 3673–3682. [Google Scholar] [CrossRef]
- Chen, N.; Wei, T.; Shang, K.; Wang, R. Digital controller based on delta operator for high-frequency DC–DC switching converters. IET Power Electron. 2018, 11, 1224–1230. [Google Scholar] [CrossRef]
- Ghosh, A.; Banerjee, S.; Sarkar, M.K.; Dutta, P. Design and implementation of type-II and type-III controller for DC–DC switched-mode boost converter by using K-factor approach and optimisation techniques. IET Power Electron. 2016, 9, 938–950. [Google Scholar] [CrossRef]
- Bitriá, R.; Palacín, J. Optimal PID Control of a Brushed DC Motor with an Embedded Low-Cost Magnetic Quadrature Encoder for Improved Step Overshoot and Undershoot Responses in a Mobile Robot Application. Sensors 2022, 22, 7817. [Google Scholar] [CrossRef] [PubMed]
- Ma, D.; Boussaada, I.; Chen, J.; Bonnet, C.; Niculescu, S.-I.; Chen, J. PID control design for first-order delay systems via MID pole placement: Performance vs. robustness. Automatica 2022, 137, 110102. [Google Scholar] [CrossRef]
- Feng, D.; Liu, S. Design of High Precision Sampling Circuit for Primary-side Feedback Flyback Converter. Instrum. Tech. Sens. 2021, 10, 52–55. [Google Scholar]
- Miao, X.; Luo, P.; Zhang, L. A Voltage Sampling Circuit Applied in Primary Side Regulation Flyback Converter. Microelectronics 2018, 48, 601–604+609. [Google Scholar]
- Xu, Y.; Hu, H.; He, X. Noncomplementary Quasi-resonant Control Active Clamped Flyback Converter. Power Electron. 2020, 54, 86–88. [Google Scholar]
- Wang, C.; Sun, D.; Zhang, X.; Hu, J.; Gu, W.; Gui, S. A Constant Current Digital Control Method for Primary-Side Regulation Active-Clamp Flyback Converter. IEEE Trans. Power Electron. 2021, 36, 7307–7318. [Google Scholar] [CrossRef]
- Astrom, K.J.; Hagglund, T. PID Controllers: Theory, Design and Tuning; Instrument Society of America: Research Triangle, NC, USA, 1995. [Google Scholar]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Zhang, Q.; Gao, L.Q.; Gao, Z. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Han, J.J.; Zhang, W.G. ADRC control for large time-delay systems. Control Decis. 1999, 14, 354. [Google Scholar]
- Chu, Z.G.; Sun, Y.M.; Wu, C.; Sepehri, N. Active disturbance rejection control applied to automated steering for lane keeping in autonomous vehicles. Control Eng. Pract. 2018, 74, 13–21. [Google Scholar] [CrossRef]
- Liu, B.Y.; Zhu, C.A.; Guo, X.Z. Current-Loop Control for the Pitching Axis of Aerial Cameras via an Improved ADRC. Math. Probl. Eng. 2017, 2017, 6162194. [Google Scholar] [CrossRef]
- Tao, J.; Sun, Q.; Tan, P.; Chen, Z.Q.; He, Y.P. Active disturbance rejection control (ADRC)-based autonomous homing control of powered parafoils. Nonlinear Dyn. 2016, 86, 1461–1476. [Google Scholar] [CrossRef]
- Chang, K.; Xia, Y.Q.; Huang, Y.L.; Ma, D.L. Obstacle avoidance and active disturbance rejection control for a quadrotor. Neurocomputing 2016, 190, 60–69. [Google Scholar] [CrossRef]
- Wu, D.; Lu, Q. Secure Control of Networked Inverted Pendulum Visual Servo Systems Based on Active Disturbance Rejection Control. Actuators 2022, 11, 355. [Google Scholar] [CrossRef]
- Ahi, B.; Nobakhti, A. Hardware Implementation of an ADRC Controller on a Gimbal Mechanism. IEEE Trans. Control Syst. Technol. 2018, 26, 2268–2275. [Google Scholar] [CrossRef]
- Singh, J.K.; Prakash, S.; Al Jaafari, K.; Al Zaabi, O.; Al Hosani, K.; Behera, R.K.; Muduli, U.R. Active Disturbance Rejection Control of Photovoltaic Three-Phase Grid Following Inverters Under Uncertainty and Grid Voltage Variations. IEEE Trans. Power Deliv. 2023, 38, 3155–3168. [Google Scholar] [CrossRef]
- Zhou, W.; Guo, S.; Guo, J.; Meng, F.; Chen, Z. ADRC-Based Control Method for the Vascular Intervention Master–Slave Surgical Robotic System. Micromachines 2021, 12, 1439. [Google Scholar] [CrossRef]
- Duan, Z.; Sun, C.; Li, J.; Tan, Y. Research on servo valve-controlled hydraulic motor system based on active disturbance rejection control. Meas. Control. 2023. [Google Scholar] [CrossRef]
- Han, Y.; Li, J.; Wang, B. Event-Triggered Active Disturbance Rejection Control for Hybrid Energy Storage System in Electric Vehicle. IEEE Trans. Transp. Electrif. 2023, 9, 75–86. [Google Scholar] [CrossRef]
- Liang, T.J.; Chen, K.H.; Chen, J.F. Primary Side Control for Flyback Converter Operating in DCM and CCM. IEEE Trans. Power Electron. 2018, 33, 3604–3612. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]
- Guan, X.M.; Zhang, L.J.; Fan, F.X. Design and simulation of flyback converter based on predictive fuzzy PI control. Mod. Electron. Tech. 2019, 42, 9–13. [Google Scholar]
- Hu, X.; Wang, H.J. Research on Controlling DC/DC Converter Based on BP Neural Network PID. J. Jiamusi Univ. Nat. Sci. Ed. 2023, 41, 28–30+95. [Google Scholar]
- Tiwary, N.; Naik, N.V.R.; Panda, A.K.; Lenka, R.K.; Narendra, A. Integral sliding mode based direct power control of isolated DC-DC converter for improved voltage regulation. Int. J. Circ. Theor. Appl. 2022, 50, 3307–3324. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Rating |
|---|---|
| Input voltage | 311 |
| Maximum duty cycle | 0.4 |
| Excitation inductance | 580 |
| Transformer turns ratio | 10.29 |
| Output power | 72 |
| Output voltage | 12 |
| Resistive load | 2 |
| Output filter capacitor | 2000 |
| Control Methods | Degrees of Freedom | Percentage Undershoot | Percentage Overshoot |
|---|---|---|---|
| PID | 1 | 12.5% | 28.33% |
| Second-order LADRC | 2 | 9.17% | 23.33% |
| Control Methods | [34] | [35] | [36] | This Paper |
|---|---|---|---|---|
| Converter type | Flyback | Buck | Buck-boost | Flyback |
| Control approach | PID compensation | BP neural network PID | LMI-Fuzzy | LADRC |
| Controller parameter adjustment method | Online | Online | Online | Offline |
| Number of sensors | 1 | 1 | 2 | 1 |
| Algorithm calculation amount | More | More | More | less |
| Simplicity in implementation | Complicated | Complicated | Complicated | Simple |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Kong, M.; Yan, J.; Lu, Y. Optimization Strategy for Output Voltage of CCM Flyback Converter Based on Linear Active Disturbance Rejection Control. Appl. Sci. 2023, 13, 12786. https://doi.org/10.3390/app132312786
Yu Y, Kong M, Yan J, Lu Y. Optimization Strategy for Output Voltage of CCM Flyback Converter Based on Linear Active Disturbance Rejection Control. Applied Sciences. 2023; 13(23):12786. https://doi.org/10.3390/app132312786
Chicago/Turabian StyleYu, Yannan, Mei Kong, Jichi Yan, and Yeqin Lu. 2023. "Optimization Strategy for Output Voltage of CCM Flyback Converter Based on Linear Active Disturbance Rejection Control" Applied Sciences 13, no. 23: 12786. https://doi.org/10.3390/app132312786