
Optimal Siting of EV Fleet Charging Station Considering EV Mobility and Microgrid Formation for Enhanced Grid Resilience


Abstract
:1. Introduction
1.1. Literature Review
1.2. Contributions
- 1.
- This study addresses a novel research problem by exploring the optimal placement of FEVCSs within a power distribution network. The research aims to enhance grid resilience, considering both the power distribution and the transportation network, a perspective that has been largely unexplored in the existing literature.
- 2.
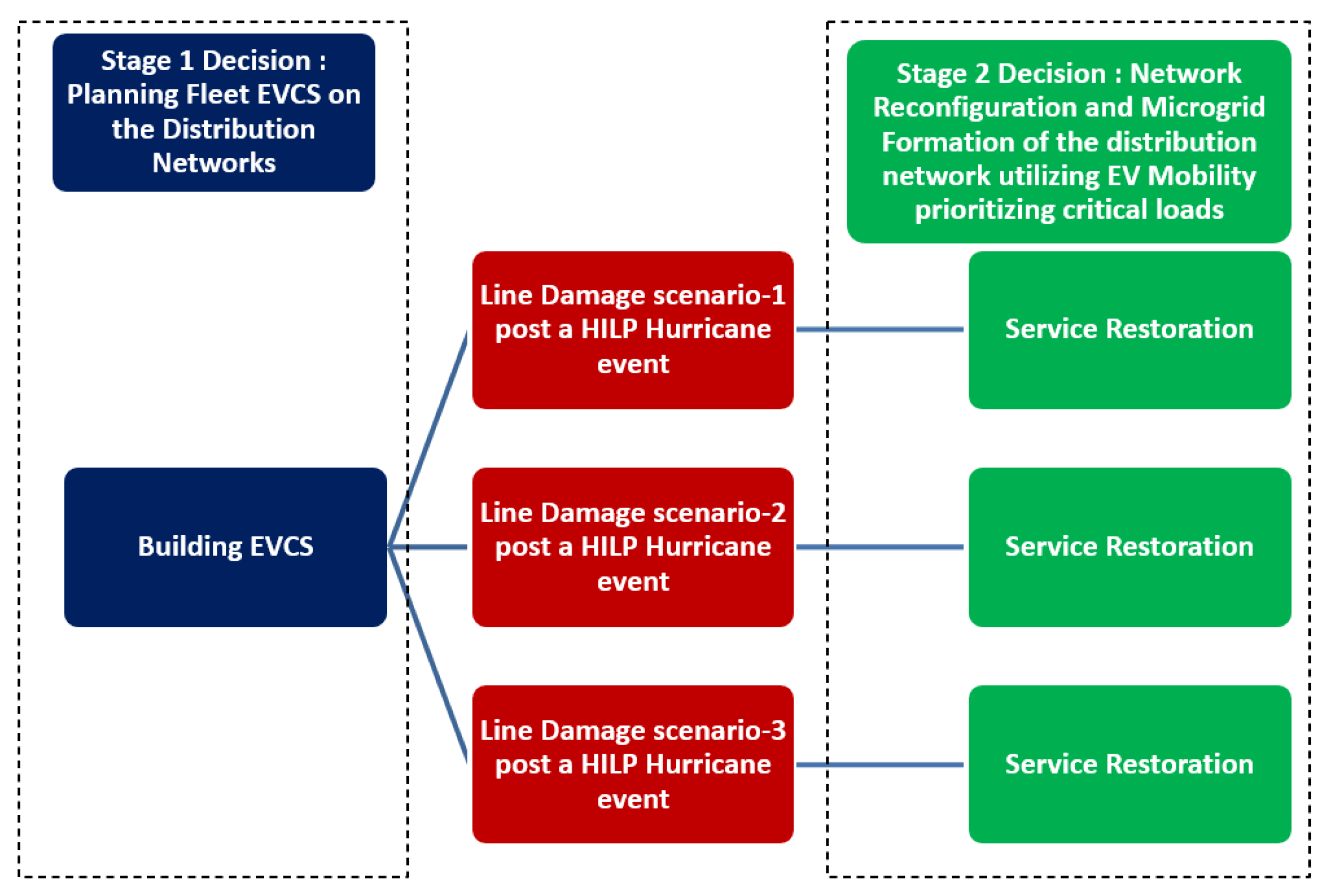
- A two-stage stochastic optimization approach with a mixed-integer second-order cone programming (MISOCP) model is developed for the optimal siting of FEVCSs, considering EV mobility and the effects of extreme weather events. The first stage deals with the selection of the most favorable location for FEVCSs, whereas the second stage minimizes the weighted sum of the value of lost load (VOLL) under potential fault scenarios, integrating transportation network considerations into the grid restoration scheme.
- 3.
- The study evaluates the influence of renewable-supported battery energy storage systems (BESSs) on the optimal placement of FEVCSs and demonstrates the potential of BESSs to improve the flexibility of the grid.
2. Problem Statement
3. Mathematical Formulation
3.1. First Stage: Distribution System Planning
3.2. Second Stage: Joint Restoration Scheme
3.2.1. Network Reconfiguration and Radiality Constraints
3.2.2. DG Constraints
3.2.3. Time–Space Network Constraints
3.2.4. Operational Constraints of Fleet Vehicles
3.2.5. Power Flow Constraints
3.3. Scenario Generation and Reduction
4. Numerical Results
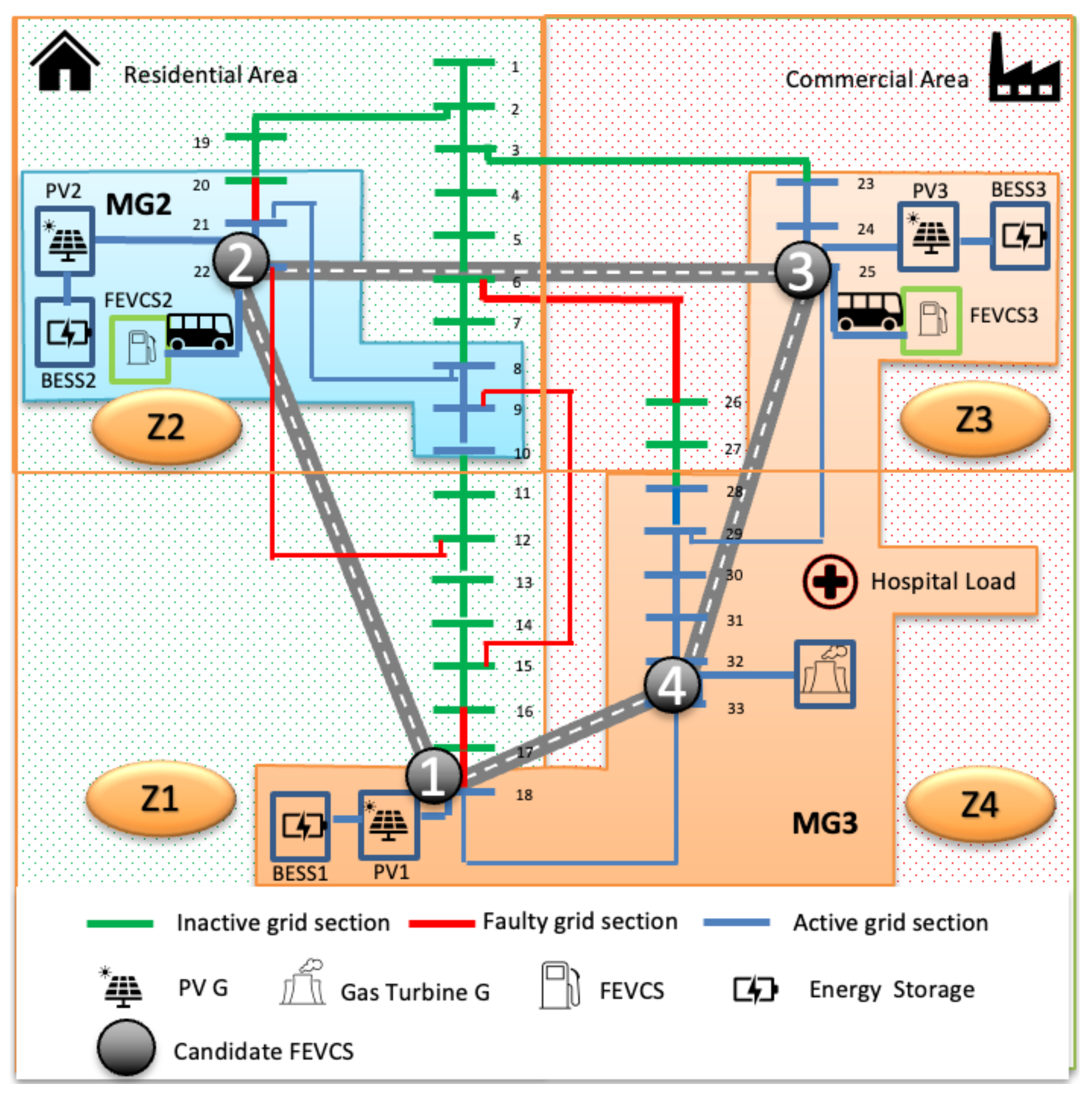
4.1. Feeder and Case Description
4.2. Simulation Results and Analysis
4.2.1. Case 1: Optimal Location of the FEVCS
4.2.2. Case 2: Second-Best Location for FEVCS
4.2.3. Effects of BESS on the FEVCS Location
4.3. MISOCP Relaxation Gap and Simulation Setup
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Sets and Indices | |
| j | Root nodes of the distribution network |
| i/i’ | Nodes of distribution network |
| l | Branches of distribution network |
| g | Distributed generation units |
| e | Fleet charging stations |
| f | Fleet vehicles |
| m | Microgrids in the distribution network |
| s | Scenarios in the second stage |
| Set of arcs in TSN starting from m. | |
| Set of arcs in TSN ending at m. | |
| Parameters | |
| Cost of hardening line l ($) | |
| Cost of FEVCS installation at node e ($) | |
| Average number of storms in a year | |
| Probability distribution of each scenario | |
| B | Budget for infrastructure planning ($) |
| Value of lost load at node i ($) | |
| Status of line health | |
| Status of bus health | |
| M | A large number |
| Resistance of branch ij (ohms) | |
| Reactance of branch ij (ohms) | |
| Active Power Output Limit of DG g (MW). | |
| Reactive Power Output Limit of DG g (Mvar). | |
| Apparent Power Capacity of Limit of DG g (MVA). | |
| Initial position of fleet vehicle f is at node e. | |
| Active/Reactive power load at node j of the ADN at time t (MW/MVAr) | |
| Lower limit of voltage at node i (V) | |
| Upper limit of voltage at node i (V) | |
| Maximum charging power of EVCS e (kW) | |
| Maximum charging capacity of EVCS e (kVA) | |
| Efficiency of EVCS e (%) | |
| Initial SOC of the fleet vehicle (MWh) | |
| Maximum SOC of the fleet vehicle f (MWh) | |
| Minimum SOC of the fleet vehicle f (Mvar) | |
| Variables | |
| Line l was hardened during planning | |
| EVCS is installed at node e. | |
| Active power load shedding at node j of the ADN at time t (MW/MVAr) | |
| Status of node i in scenario s | |
| Bus i belongs to microgrid m in scenario s |
| Line l is active in scenario s | |
| Line l belongs to microgrid m in scenario s | |
| Line l is healthy after a hurricane in scenario s | |
| Binary variable is 1 if microgrid m is active in scenario s. | |
| Active/Reactive Power Output of DG g at time t (MW/Mvar). | |
| Fictitious flows on the distribution line | |
| Active distribution node with an FEVCS e installed | |
| Fictitious flow in line | |
| Fictitious supply of master DG | |
| Status is 1 if the fleet vehicle f is in the arc (e, u) at time t | |
| Status is 1 if vehicle f is in FEVCS e | |
| Charging power of the fleet vehicle f at node | |
| Discharging power of the fleet vehicle f at node e in time t of scenario s | |
| Bidirectional active power transfer of fleet vehicle f at node e in time t of scenario s | |
| Reactive power transfer of fleet vehicle f at node e in time t of scenario s | |
| Charging status of fleet vehicle f in time t of scenario s | |
| Discharge status of fleet vehicle f in time t of scenario s | |
| State of charge of the fleet vehicle f at time t in the scenario s (%) | |
| Active power flow from node i to node j of the distribution network (MW/MVAr) | |
| Reactive power flow from node i to node j of the distribution network (MW/MVAr) | |
| Square of current from node i to node j | |
| Square of voltage at node j at time t | |
| Served Active/Reactive power load at node j of the ADN at time t (MW/MVAr) |
References
- U.S. Environmental Protection Agency. Fast Facts on Transportation Greenhouse Gas Emissions. Available online: https://www.epa.gov/greenvehicles/fast-facts-transportation-greenhouse-gas-emissions (accessed on 5 June 2023).
- National Renewable Energy Laboratory. Fleet DNA Project Data Summary Report. Available online: https://www.nrel.gov/transportation/assets/pdfs/fleet_dna_delivery_trucks_report.pdf (accessed on 16 January 2023).
- Atlas Public Policy. U.S. Medium- and Heavy-Duty Truck Electrification Infrastructure Assessment. Available online: https://atlaspolicy.com/u-s-medium-and-heavy-duty-truck-electrification-infrastructure-assessment/ (accessed on 16 January 2023).
- Chargepoint. Electric Vehicle (EV) Charging Incentives. Available online: https://www.chargepoint.com/incentives/commercial?type=13&state=45 (accessed on 16 January 2023).
- Panteli, M.; Trakas, D.N.; Mancarella, P.; Hatziargyriou, N.D. Power systems resilience assessment: Hardening and smart operational enhancement strategies. Proc. IEEE 2017, 105, 1202–1213. [Google Scholar] [CrossRef]
- Hussain, A.; Musilek, P. Resilience Enhancement Strategies For and Through Electric Vehicles. Sustain. Cities Soc. 2022, 80, 103788. [Google Scholar] [CrossRef]
- Brown, M.A.; Soni, A. Expert perceptions of enhancing grid resilience with electric vehicles in the United States. Energy Res. Soc. Sci. 2019, 57, 101241. [Google Scholar] [CrossRef]
- Ahmadi, S.E.; Marzband, M.; Ikpehai, A.; Abusorrah, A. Optimal stochastic scheduling of plug-in electric vehicles as mobile energy storage systems for resilience enhancement of multi-agent multi-energy networked microgrids. J. Energy Storage 2022, 55, 105566. [Google Scholar] [CrossRef]
- Yao, F.; Wang, J.; Wen, F.; Zhao, J.; Zhao, X.; Liu, W. Resilience Enhancement for a Power System with Electric Vehicles under Extreme Weather Conditions. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 3674–3679. [Google Scholar]
- Yao, S.; Wang, P.; Zhao, T. Transportable energy storage for more resilient distribution systems with multiple microgrids. IEEE Trans. Smart Grid 2018, 10, 3331–3341. [Google Scholar] [CrossRef]
- Erenoğlu, A.K.; Sancar, S.; Terzi, İ.S.; Erdinç, O.; Shafie-khah, M.; Catalão, J.P. Resiliency-Driven Multi-Step Critical Load Restoration Strategy Integrating On-Call Electric Vehicle Fleet Management Services. IEEE Trans. Smart Grid 2022, 13, 3118–3132. [Google Scholar] [CrossRef]
- Ma, S.; Chen, B.; Wang, Z. Resilience enhancement strategy for distribution systems under extreme weather events. IEEE Trans. Smart Grid 2016, 9, 1442–1451. [Google Scholar] [CrossRef]
- Nazemi, M.; Moeini-Aghtaie, M.; Fotuhi-Firuzabad, M.; Dehghanian, P. Energy storage planning for enhanced resilience of power distribution networks against earthquakes. IEEE Trans. Sustain. Energy 2019, 11, 795–806. [Google Scholar] [CrossRef]
- Dehghani, N.L.; Jeddi, A.B.; Shafieezadeh, A. Intelligent hurricane resilience enhancement of power distribution systems via deep reinforcement learning. Appl. Energy 2021, 285, 116355. [Google Scholar] [CrossRef]
- Ghasemi, M.; Kazemi, A.; Gilani, M.A.; Shafie-Khah, M. A stochastic planning model for improving resilience of distribution system considering master-slave distributed generators and network reconfiguration. IEEE Access 2021, 9, 78859–78872. [Google Scholar] [CrossRef]
- Faramarzi, D.; Rastegar, H.; Riahy, G.; Doagou-Mojarrad, H. A three-stage hybrid stochastic/IGDT framework for resilience-oriented distribution network planning. Int. J. Electr. Power Energy Syst. 2023, 146, 108738. [Google Scholar] [CrossRef]
- Poudyal, A.; Poudel, S.; Dubey, A. Risk-based active distribution system planning for resilience against extreme weather events. IEEE Trans. Sustain. Energy 2022, 14, 1178–1192. [Google Scholar] [CrossRef]
- Ding, T.; Lin, Y.; Bie, Z.; Chen, C. A resilient microgrid formation strategy for load restoration considering master-slave distributed generators and topology reconfiguration. Appl. Energy 2017, 199, 205–216. [Google Scholar] [CrossRef]
- Ravi, A.; Bai, L.; Cecchi, V.; Ding, F. Stochastic Strategic Participation of Active Distribution Networks with High-Penetration DERs in Wholesale Electricity Markets. IEEE Trans. Smart Grid 2023, 14, 1515–1527. [Google Scholar] [CrossRef]
- NOAA’s Atlantic Oceanographic & Meteorological Laboratory. Hurricane Database. Available online: https://www.aoml.noaa.gov/hrd/hurdat/hurdat2.html (accessed on 16 July 2021).
- Sopasakis, P. PDFsampler. 2023. Available online: https://www.mathworks.com/matlabcentral/fileexchange/41689-pdfsampler (accessed on 20 January 2023).
- Scenred. 2023. Available online: https://github.com/supsi-dacd-isaac/scenred (accessed on 20 January 2023).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resilience Enhancement Measures | Optimizational Model | |||||
|---|---|---|---|---|---|---|
|
Planning Measure | Operational Measures | |||||
|
FEVCS Placement |
Network Reconfiguration |
Dynamic Microgrid Formation |
Transportation Network |
EV Fleet Scheduling | ||
| [8] | ✘ | ✘ | ✘ | ✘ | ✘ | Stochastic |
| [9] | ✘ | ✘ | ✘ | ✘ | ✘ | Robust |
| [10] | ✘ | ✔ | ✘ | ✔ | ✘ | Deterministic |
| [11] | ✘ | ✘ | ✘ | ✔ | ✔ | Stochastic |
| [12] | ✘ | ✘ | ✘ | ✘ | ✘ | Stochastic |
| [13] | ✘ | ✘ | ✘ | ✘ | ✘ | Stochastic |
| [14] | ✘ | ✘ | ✘ | ✘ | ✘ | Stochastic |
| [15] | ✘ | ✔ | ✔ | ✘ | ✘ | Stochastic |
| [16] | ✘ | ✔ | ✘ | ✘ | ✘ | Stochastic and Risk Based |
| [17] | ✘ | ✔ | ✔ | ✘ | ✘ | Risk Based |
| * | ✔ | ✔ | ✔ | ✔ | ✔ | Stochastic |
| Time | |||||||
|---|---|---|---|---|---|---|---|
| 15:00 | 16:00 | 17:00 | 18:00 | 19:00 | 20:00 | 21:00 | |
| EV#1 | 2-3 | 3-2 | 2-3 | 3-3 | 3-3 | 3-3 | 3-3 |
| EV#2 | 1-1 | 1-2 | 2-2 | 2-2 | 2-3 | 3-3 | 3-3 |
| EV#3 | 4-3 | 3-3 | 3-3 | 3-2 | 2-2 | 2-2 | 2-2 |
| Time | |||||||
|---|---|---|---|---|---|---|---|
| 15:00 | 16:00 | 17:00 | 18:00 | 19:00 | 20:00 | 21:00 | |
| EV#1 | 1-4 | 4-3 | 3-3 | 3-3 | 3-2 | 2-2 | 2-2 |
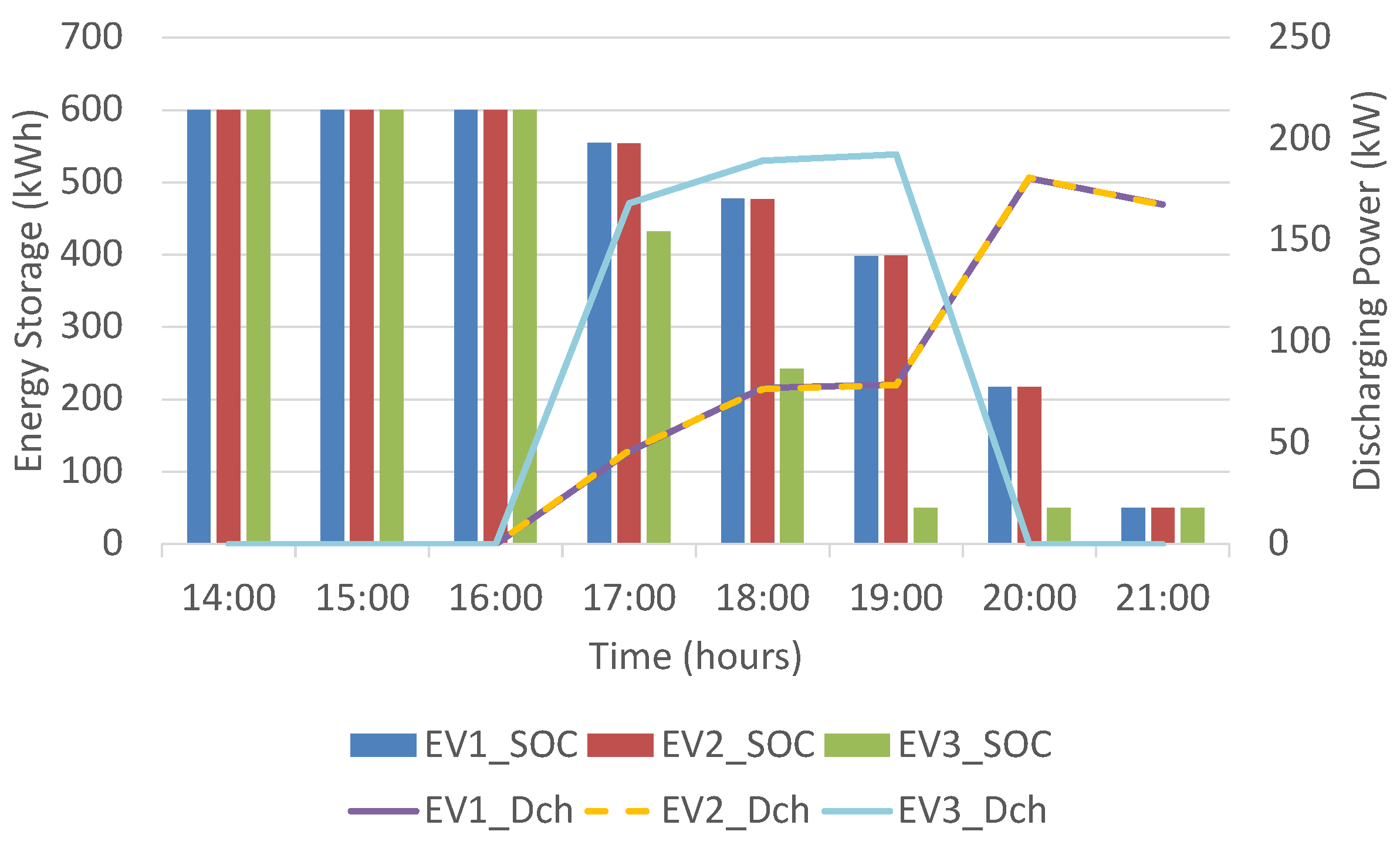
| EV1_SOC (kWh) | 600.0 | 600.0 | 350.0 | 100.0 | 100.0 | 81.8 | 56.3 |
| EV#2 | 2-3 | 3-3 | 3-2 | 2-2 | 2-3 | 3-3 | 3-3 |
| EV2_SOC (kWh) | 600.0 | 350.0 | 350.0 | 555.8 | 555.8 | 305.8 | 55.8 |
| EV#3 | 2-2 | 2-2 | 2-3 | 3-3 | 3-3 | 3-3 | 3-4 |
| EV3_SOC (kWh) | 513.3 | 600.0 | 600.0 | 427.6 | 216.8 | 50.0 | 50.0 |
| Case | MIP GAP | Solution Time (hours) |
|---|---|---|
| 0 | 0 | 0.004 |
| 1 | 0 | 0.261 |
| 2 | 0.001 | 17.534 |
| 3 | 0 | 0.597 |
| 4 | 0.078 | 55.437 |
| 5 | 0.13 | 70.579 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ravi, A.; Bai, L.; Wang, H. Optimal Siting of EV Fleet Charging Station Considering EV Mobility and Microgrid Formation for Enhanced Grid Resilience. Appl. Sci. 2023, 13, 12181. https://doi.org/10.3390/app132212181
Ravi A, Bai L, Wang H. Optimal Siting of EV Fleet Charging Station Considering EV Mobility and Microgrid Formation for Enhanced Grid Resilience. Applied Sciences. 2023; 13(22):12181. https://doi.org/10.3390/app132212181
Chicago/Turabian StyleRavi, Abhijith, Linquan Bai, and Hong Wang. 2023. "Optimal Siting of EV Fleet Charging Station Considering EV Mobility and Microgrid Formation for Enhanced Grid Resilience" Applied Sciences 13, no. 22: 12181. https://doi.org/10.3390/app132212181