
Calibration of Viscous Damping–Stiffness Control Force in Active and Semi-Active Tuned Mass Dampers for Reduction of Harmonic Vibrations

Abstract
:1. Introduction
2. Den Hartog’s TMD as a Reference Mass Damper
2.1. Den Hartog’s TMD Tuning
2.2. Equations of Motion and Frequency Response to Harmonic Excitation
2.3. Dynamic Amplification Factor
3. Calibration of ATMD with Viscous Damping–Stiffness Control Force
3.1. Active Control Force
3.2. Control Objective
3.3. Equations of Motion and Dynamic Amplification
3.4. Calibrating Viscous Damping–Stiffness Control Force to Mimic the Optimal Acceleration Feedback Control by Nishimura et al.
3.5. Numerical Demonstration
4. Sub-Optimal STMD with Clipped Viscous Damping–Stiffness Control Force
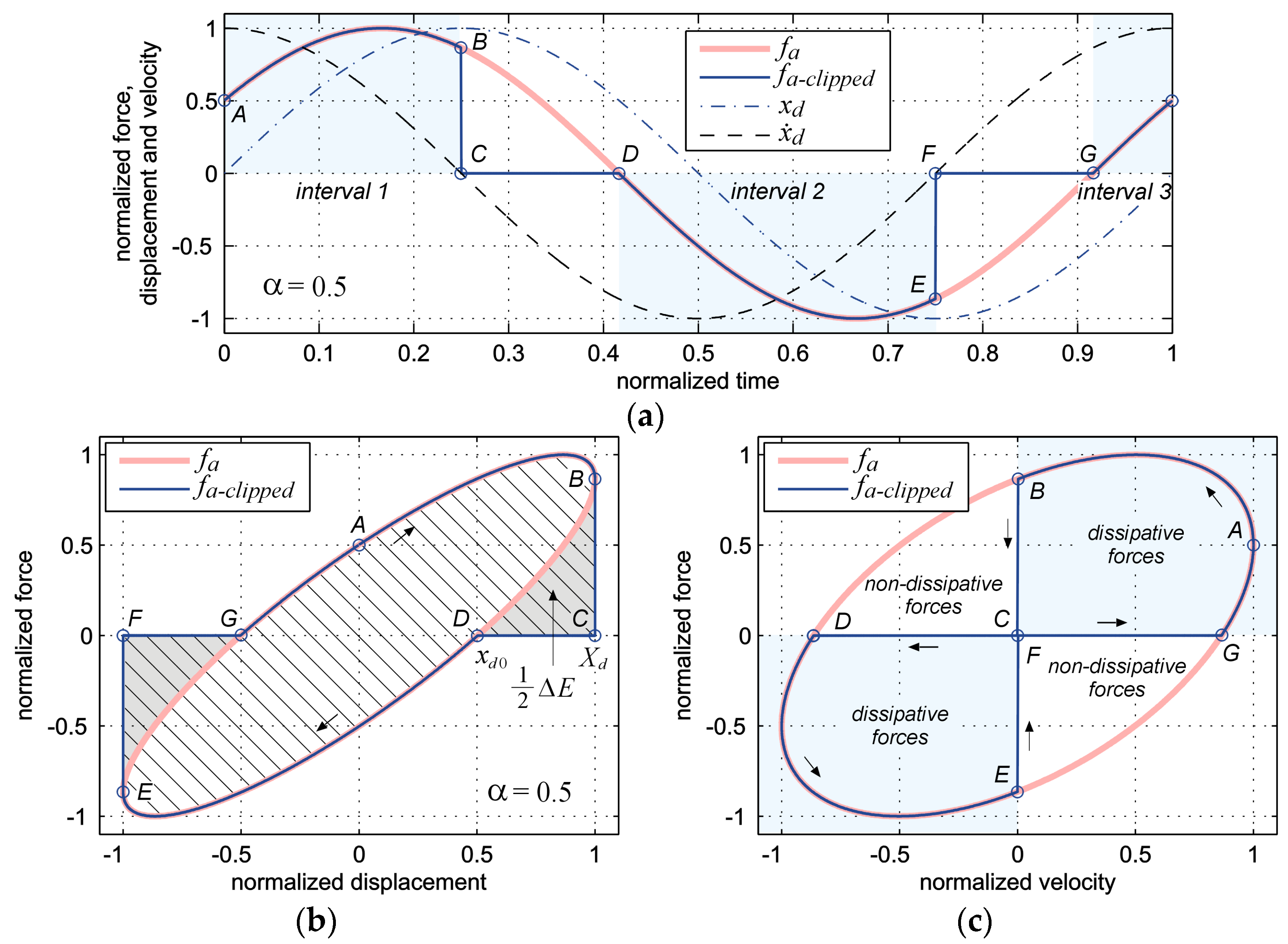
4.1. Semi-Active Control Force of Sub-Optimal STMD
4.2. Examples of Force Characteristics
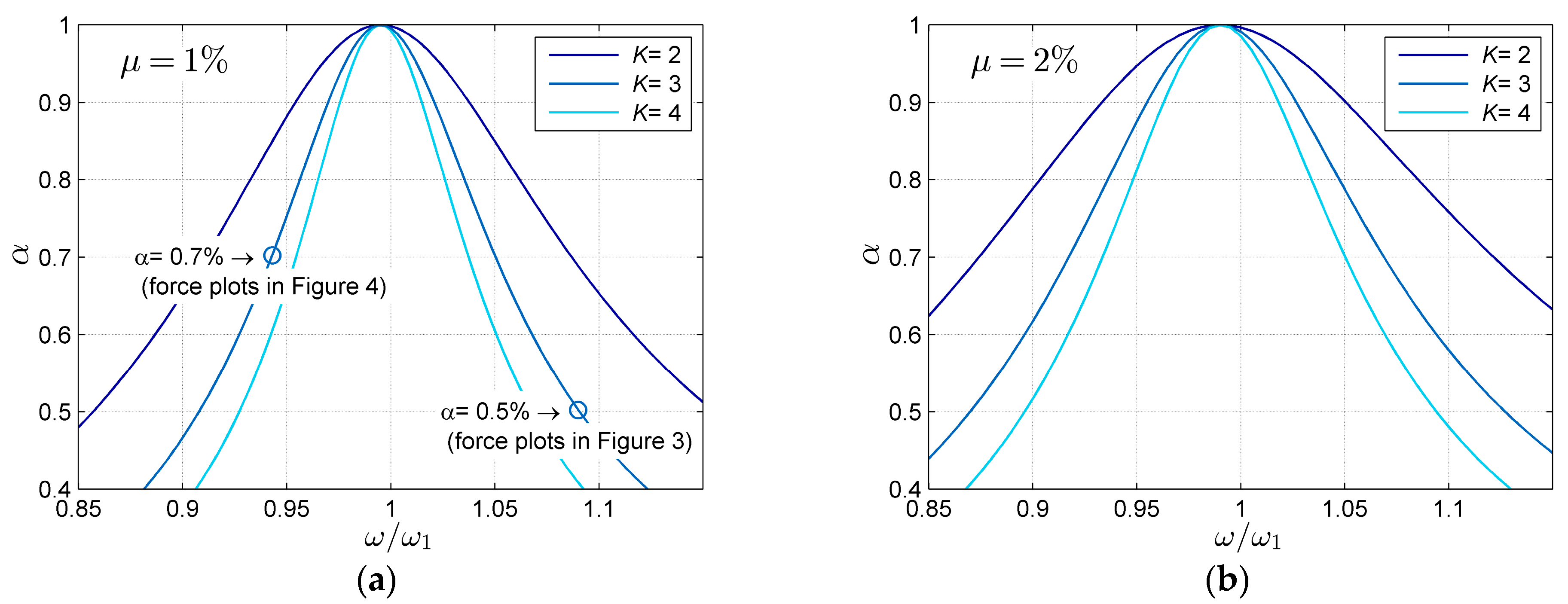
4.3. Description of Force Clipping Degree Using the Clipping Coefficient
4.4. Energy Dissipation Resulting from Clipping
4.5. Calculation of Equivalent Viscous Damping and Equivalent Stiffness for the Clipped Viscous Damping–Stiffness Force Using Harmonic Balance Method
4.6. Numerical Analysis of Sub-Optimal STMD
5. Calibration of STMD Using Numerical Optimization
5.1. Semi-Active Control Force
5.2. Objective and Procedure of Optimization
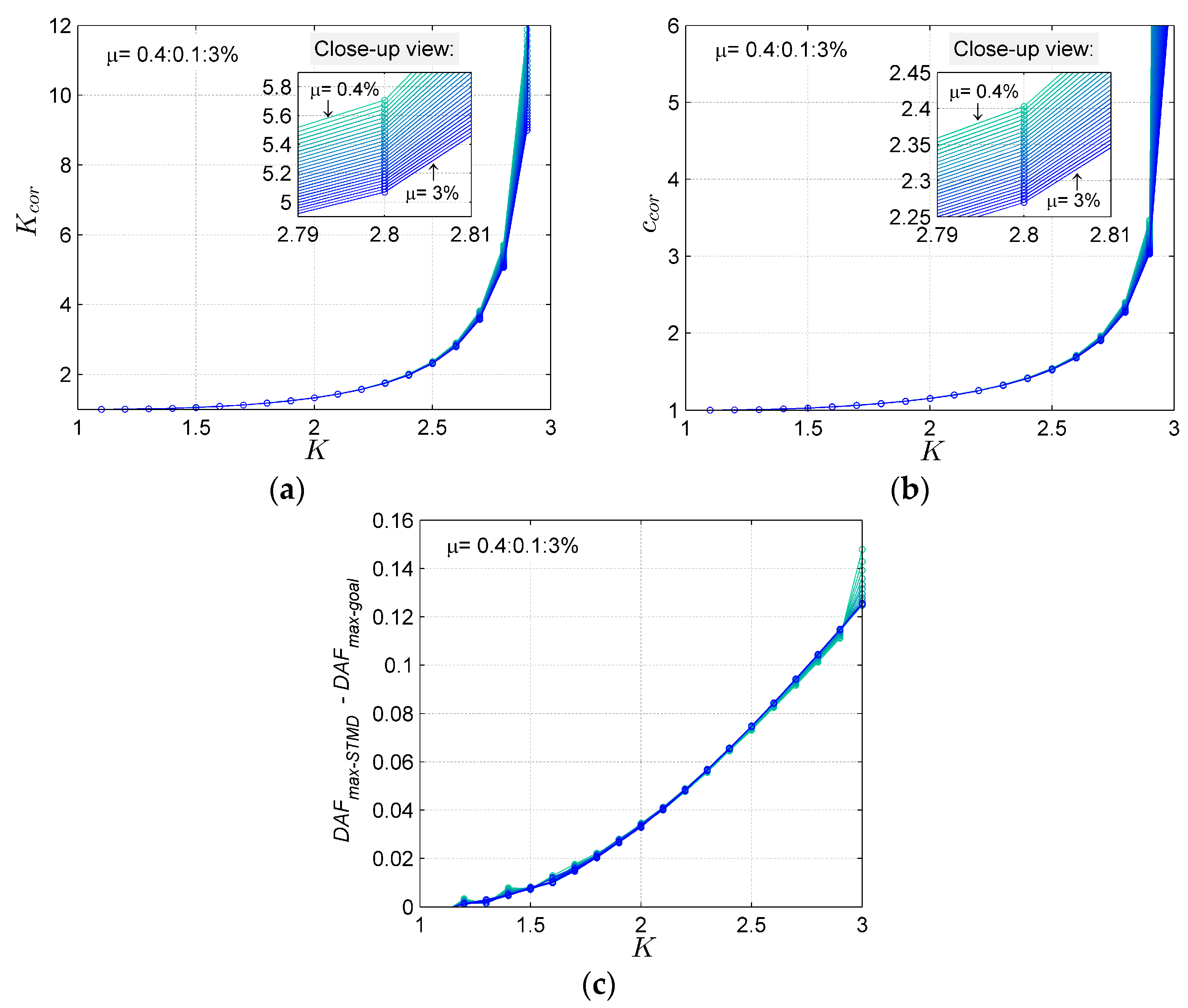
5.3. Optimization Results
5.4. Analysis of the Optimized STMD at Its Performance Limit
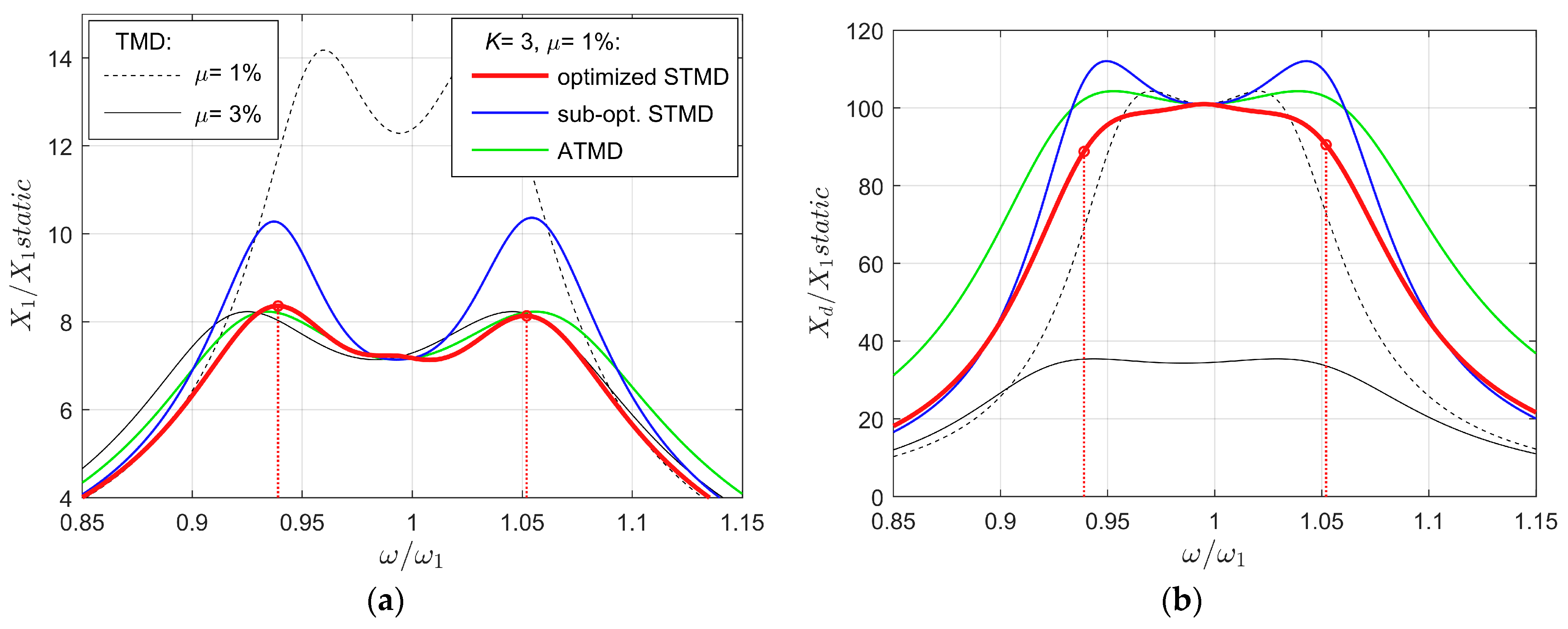
5.4.1. Frequency Responses
5.4.2. Characterization of the Control Force
5.4.3. Analysis of the Force–Displacement Characteristics at Crucial Frequencies
6. Conclusions
- The optimal ATMD with acceleration feedback proposed by Nishimura et al. [17] can alternatively be realized based on a relative displacement and velocity feedback, without relying on acceleration feedback.
- Both the sub-optimal STMD and the optimized STMD with the clipped viscous damping–stiffness control force have a clearly defined efficiency limit.
- The application of the numerically optimized correction factors in the semi-active control force (46)–(48) allowed us to achieve an enhanced performance of the optimized STMD compared to the sub-optimal STMD.
- The highest effectiveness of the optimized STMD in reducing harmonic vibrations corresponds to the TMD with roughly three times greater mass.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. MATLAB Code

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| % Paper_demo.m % Calculations and plots of the frequency responses for the ATMD, STMD, and TMD close all, clear all %% Design parameters (adjust, see Table 1 for Kcor and ccor) K = 3; mu = 1/100; Kcor = 890.90; ccor = 30.165; % K = 2.8; mu =1/100; Kcor = 5.5289; ccor = 2.3679; % K = 2.6; mu = 1/100; Kcor = 2.8751; ccor = 1.7019; % K = 2; mu = 1/100; Kcor = 1.3331; ccor = 1.1539; %% Model parameters f1 = 0.5; % natural frequency, Hz om1 = 2*pi*f1; % natural frequency, rad/s m1 = 500e3; % structure mass, kg Fexc = 8e3; % amplitude of force excitation, N k1 = om1^2*m1; % structure stiffness, N/m m2 = m1*mu; % mass, kg om = om1*[0.7:2e-3:1.3]; % frequency of excitation vector, rad/s %% TMDs design and frequency responses for mass ratio mu and K*mu [k2dh, c2dh] = mm_DH_tuning(m1, om1, mu); [k2dhK,c2dhK] = mm_DH_tuning(m1, om1, K*mu); [TMD1_DAFX1,TMD1_DAFXd] = mm_FRF(m1, om1, m2, k2dh, c2dh, om, Fexc); [TMD2_DAFX1,TMD2_DAFXd] = mm_FRF(m1, om1, K*m2, k2dhK, c2dhK, om, Fexc); %% ATMD design and frequency responses for mass ratio mu [ca, ka] = mm_fa_gains(K, m1, om1, mu, om); [ATMD_DAFX1, ATMD_DAFXd] = mm_FRF(m1, om1, m2, (k2dh+ka), ca, om, Fexc); %% Sub-optimal STMD - frequency responses for mass ratio mu [keq, ceq, alpha] = mm_equiv_linear(ka, ca, om); [STMD_DAFX1sub,STMD_DAFXdsub]=mm_FRF(m1,om1,m2,(k2dh+keq),ceq,om,Fexc); %% Optimized STMD design and frequency responses for mass ratio mu [csa, ksa] = mm_fsa_gains(K, m1, om1, mu, om, Kcor, ccor); [keqopt, ceqopt, alphaopt] = mm_equiv_linear(ksa, csa, om); [STMD_DAFX1,STMD_DAFXd]=mm_FRF(m1,om1,m2,(k2dh+keqopt),ceqopt,om,Fexc); %% Plots figure plot(om/om1, TMD1_DAFXd,‘--k’), hold on plot(om/om1, TMD2_DAFXd,‘k’) plot(om/om1, ATMD_DAFXd,‘g’) plot(om/om1, STMD_DAFXdsub,‘b’) plot(om/om1, STMD_DAFXd,‘r’) xlabel(‘omega/omega1’), ylabel(‘Xd/X1static’), xlim([0.7 1.3]) figure plot(om/om1, TMD1_DAFX1,‘--k’), hold on plot(om/om1, TMD2_DAFX1,‘k’) plot(om/om1, ATMD_DAFX1,‘g’) plot(om/om1, STMD_DAFX1sub,‘b’) plot(om/om1, STMD_DAFX1,‘r’) xlabel(‘omega/omega1’), ylabel(‘X1/X1static’), xlim([0.7 1.3]) legend([‘TMD,\mu=’,num2str(100*mu),‘%’],[‘TMD,\mu=’,num2str(100*K*mu),‘%’],… [‘ATMD,\mu=’,num2str(100*mu),‘%,K=’,num2str(K)],… [‘STMD-sub,\mu=’,num2str(100*mu),‘%,K=’,num2str(K)],… [‘STMD-opt,\mu=’,num2str(100*mu),‘%,K=’,num2str(K)]) |
| function [DAFX1, DAFXd] = mm_FRF(m1, om1, m2, k2, c2, om, Fexc) % Frequency response % Outputs: DAFX1, DAFXd - dynamic amplifications of disp. amplitudes X1 and Xd k1 = om1^2*m1; % structure’ stiffness, N/m % Complex amplitudes of harmonic response: num = k2-om.^2*m2 + 1i*om.*c2; den = (k1-om.^2*(m1 + m2)).*(k2-om.^2*m2 + 1i*om.*c2) - om.^4*m2^2; x1 = Fexc * num./den; % structural mass complex amplitude, Equation (8) xd = Fexc * om.^2*m2 ./den; % relative complex amplitude, Equation (9) % Displacement amplitudes: X1 = abs(x1); % absolute amplitude X1 of mass m1, m Xd = abs(xd); % relative amplitude Xd, m % Dynamic amplification factors: X1static = Fexc/k1; % static deflection due to the excitation force, m DAFX1 = X1/X1static; % dynamic amplification of X1, Equation (10) DAFXd = Xd/X1static; % dynamic amplification of Xd |
| function [ca, ka] = mm_fa_gains(K, m1, om1, mu, om) % Viscous damping–stiffness force parameters % Outputs: ca, ka - parameters of the control force given by Equation (12) ca = m1*om1*sqrt(3*mu^3/(2*K*(1 + mu)^3)); % Equation (31) ka = m1* (K*mu-mu)/(K*mu + K) * (om.^2 - om1^2/(mu + 1)); % Equation (32) |
| function [csa, ksa] = mm_fsa_gains(K, m1, om1, mu, om, Kcor, ccor) % Clipped viscous damping–stiffness force parameters % Outputs: csa, ksa - parameters of the control force given by Equation (46) csa = ccor*m1*om1*sqrt(3*mu^3/(2*K*Kcor*(1 + mu)^3));% Equation (47) ksa = m1*(K*Kcor*mu-mu)/(K*Kcor*mu + K*Kcor)*(om.^2-om1^2/(mu + 1));% Equation (48) |
| function [k2dh, c2dh] = mm_DH_tuning(m1, om1, mu) % Den Hartog tuning, Equations (1) and (3) % Outputs: k2dh - stiffness, N/m; c2dh - viscous damping, Ns/m m2 = mu*m1; % mass, kg om2 = om1/(1 + mu); % frequency, rad/s k2dh = om2^2*m2; % spring stiffness, N/m dzeta2 = sqrt(3/8*mu/(1 + mu)); % damping ratio c2dh = 2*dzeta2*m2*om2; % viscous damping coefficient, Ns/m |
| function [keq, ceq, alpha] = mm_equiv_linear(ka, ca, om) % Equivalent linearization of the clipped viscous damping–stiffness control force % Outputs: keq, ceq - equivalent stiffness and equivalent viscous damping, % alpha - clipping coefficient alpha = ca.*om ./sqrt(ka.^2 + om.^2.*ca.^2);% Equation (37) ceq = ca/2 + ca.*asin(alpha)/pi + ca.*sin(2*asin(alpha))/(2*pi) -… sign(ka).*ka.*(alpha.^2 -1)./(pi*om); % Equation (44) keq = ka/2 - sign(ka).*ca.*om.*(alpha.^2 -1)/pi + ka.*asin(alpha)/pi -… ka.*sin(2*asin(alpha) )/(2*pi); % Equation (45) |
Appendix B. Analytical Calculations of Integrals in the Equivalent Linearization for a Clipped Viscous Damping–Stiffness Force
References
- Elias, S.; Matsagar, V. Research developments in vibration control of structures using passive tuned mass dampers. Annu. Rev. Control 2017, 44, 129–156. [Google Scholar] [CrossRef]
- Koutsoloukas, L.; Nikitas, N.; Aristidou, P. Passive, semi-active, active and hybrid mass dampers: A literature review with associated applications on building-like structures. Dev. Built Environ. 2022, 12, 100094. [Google Scholar] [CrossRef]
- Fujino, Y.; Siringoringo, D. Vibration Mechanisms and Controls of Long-Span Bridges: A Review. Struct. Eng. Int. 2013, 23, 248–268. [Google Scholar] [CrossRef]
- Li, Q.S.; Zhi, L.H.; Tuan, A.Y.; Kao, C.S.; Su, S.C.; Wu, C.F. Dynamic behavior of Taipei 101 tower: Field measurement and numerical analysis. J. Struct. Eng. 2010, 137, 143–155. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Mechanical Vibrations; McGraw-Hill: New York, NY, USA, 1956. [Google Scholar]
- Burton, M.D.; Kwok, K.C.S.; Abdelrazaq, A. Wind-induced motion of tall buildings: Designing for occupant comfort. Int. J. High-Rise Build. 2015, 4, 1–8. [Google Scholar]
- Hayes, J. Tall storeys. Eng. Technol. 2018, 13, 70–73. [Google Scholar] [CrossRef]
- Yao, J.T. Concept of structural control. J. Struct. Div. 1972, 98, 1567–1574. [Google Scholar] [CrossRef]
- Nishitani, A. Obituary for Professor Takuji Kobori: Great pioneer in structural dynamics and control. Struct. Control Health Monit. 2008, 15, 117–119. [Google Scholar] [CrossRef]
- Chang, J.C.H.; Soong, T.T. Structural control using active tuned mass dampers. J. Eng. Mech. Div. 1980, 106, 1091–1098. [Google Scholar] [CrossRef]
- Kobori, T.; Koshika, N.; Yamada, K.; Ikeda, Y. Seismic-response-controlled structure with active mass driver system. Part 1: Design. Earthq. Eng. Struct. Dyn. 1991, 20, 133–149. [Google Scholar] [CrossRef]
- Ikeda, Y. Active and semi-active vibration control of buildings in Japan—Practical applications and verification. Struct. Control Health Monit. 2009, 16, 703–723. [Google Scholar] [CrossRef]
- Spencer, B.F.; Nagarajaiah, S. State of the art of structural control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Casciati, F.; Rodellar, J.; Yildirim, U. Active and semi-active control of structures—Theory and applications: A review of recent advances. J. Intell. Mater. Syst. Struct. 2012, 23, 1181–1195. [Google Scholar] [CrossRef]
- Zhou, K.; Zhang, J.W.; Li, Q.S. Control performance of active tuned mass damper for mitigating wind-induced vibrations of a 600-m-tall skyscraper. J. Build. Eng. 2021, 45, 103646. [Google Scholar] [CrossRef]
- Zhou, K.; Li, Q.S. Vibration mitigation performance of active tuned mass damper in a super high-rise building during multiple tropical storms. Eng. Struct. 2022, 269, 114840. [Google Scholar] [CrossRef]
- Nishimura, I.; Kobori, T.; Sakamoto, M.; Koshika, N.; Sasaki, K.; Ohrui, S. Active tuned mass damper. Smart Mater. Struct. 1992, 1, 306–311. [Google Scholar] [CrossRef]
- Asami, T.; Nishihara, O.; Baz, A.M. Analytical solutions to H∞ and H2 optimization of dynamic vibration absorbers attached to damped linear systems. J. Vib. Acoust. 2002, 124, 284–295. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Soltani, P. A short note on equal peak design for the pendulum tuned mass dampers. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2016, 231, 285–291. [Google Scholar] [CrossRef]
- Habib, G.; Detroux, T.; Viguié, R.; Kerschen, G. Nonlinear generalization of Den Hartog’s equal-peak method. Mech. Syst. Signal Process. 2015, 52, 17–28. [Google Scholar] [CrossRef]
- Chatterjee, S. Optimal active absorber with internal state feedback for controlling resonant and transient vibration. J. Sound Vib. 2010, 329, 5397–5414. [Google Scholar] [CrossRef]
- Cheung, Y.L.; Wong, W.O.; Cheng, L. Design optimization of a damped hybrid vibration absorber. J. Sound Vib. 2012, 331, 750–766. [Google Scholar] [CrossRef]
- Brodersen, M.L.; Bjørke, A.-S.; Høgsberg, J. Active tuned mass damper for damping of offshore wind turbine vibrations. Wind Energy 2017, 20, 783–796. [Google Scholar] [CrossRef]
- Koo, J.H.; Goncalves, F.D.; Ahmadian, M.A. Comprehensive analysis of the response time of MR dampers. Smart Mater. Struct. 2006, 15, 351–358. [Google Scholar] [CrossRef]
- Strecker, Z.; Roupec, J.; Mazurek, I.; Machacek, O.; Kubik, M.; Klapka, M. Design of magnetorheological damper with short time response. J. Intell. Mater. Syst. Struct. 2015, 26, 1951–1958. [Google Scholar] [CrossRef]
- Zhu, X.; Jing, X.; Cheng, L. Magnetorheological fluid dampers: A review on structure design and analysis. J. Intell. Mater. Syst. Struct. 2012, 23, 839–873. [Google Scholar] [CrossRef]
- Weber, F.; Maślanka, M. Frequency and damping adaptation of a TMD with controlled MR damper. Smart Mater. Struct. 2012, 21, 055011. [Google Scholar] [CrossRef]
- Weber, F.; Distl, H.; Maślanka, M. Semi-active TMD concept for Volgograd Bridge. Top. Dyn. Civ. Struct. 2013, 4, 79–88. [Google Scholar]
- Weber, F.; Distl, H.; Fischer, S.; Braun, C. MR damper controlled vibration absorber for enhanced mitigation of harmonic vibrations. Actuators 2016, 5, 27. [Google Scholar] [CrossRef]
- Zemp, R.; de la Llera, J.C.; Saldias, H.; Weber, F. Development of a long-stroke MR damper for a building with tuned masses. Smart Mater. Struct. 2016, 25, 105006. [Google Scholar] [CrossRef]
- Weber, F.; Maślanka, M. Precise stiffness and damping emulation with MR dampers and its application to semi-active tuned mass dampers of Wolgograd Bridge. Smart Mater. Struct. 2014, 23, 015019. [Google Scholar] [CrossRef]
- Weber, F. Semi-active vibration absorber based on real-time controlled MR damper. Mech. Syst. Signal Process. 2014, 46, 272–288. [Google Scholar] [CrossRef]
- Pinkaew, T.; Fujino, Y. Effectiveness of semi-active tuned mass dampers under harmonic excitation. Eng. Struct. 2001, 23, 850–856. [Google Scholar] [CrossRef]
- Kang, J.W.; Kim, H.S.; Lee, D.G. Mitigation of wind response of a tall building using semi-active tuned mass dampers. Struct. Des. Tall Spec. 2011, 20, 552–565. [Google Scholar] [CrossRef]
- Viet, L.D.; Nghi, N.B.; Hieu, N.N.; Hung, D.T.; Linh, N.N.; Hung, L.X. On a combination of ground-hook controllers for semi-active tuned mass dampers. J. Mech. Sci. Technol. 2014, 28, 2059–2064. [Google Scholar] [CrossRef]
- Moutinho, C. Testing a simple control law to reduce broadband frequency harmonic vibrations using semiactive tuned mass dampers. Smart Mater. Struct. 2015, 24, 055007. [Google Scholar] [CrossRef]
- Ferreira, F.; Moutinho, C.; Cunha, Á.; Caetano, E. Proposal of optimum tuning of semiactive TMDs used to reduce harmonic vibrations based on phase control strategy. Struct. Control Health Monit. 2018, 25, e2131. [Google Scholar] [CrossRef]
- Rosół, M.; Martynowicz, P. Implementation of the LQG controller for a wind turbine tower-nacelle model with an MR tuned vibration absorber. J. Theor. Appl. Mech. 2016, 54, 1109–1123. [Google Scholar] [CrossRef]
- Martynowicz, P. Nonlinear optimal-based vibration control for systems with MR tuned vibration absorbers. J. Low Freq. Noise Vib. Act. Control 2019, 38, 1607–1628. [Google Scholar] [CrossRef]
- Martynowicz, P. Real-time implementation of nonlinear optimal-based vibration control for a wind turbine model. J. Low Freq. Noise Vib. Act. Control 2019, 38, 1635–1650. [Google Scholar] [CrossRef]
- Demetriou, D.; Nikitas, N.; Tsavdaridis, K.D. Performance of fixed-parameter control algorithms on high-rise structures equipped with semi-active tuned mass dampers. Struct. Des. Tall Spec. Build. 2016, 25, 340–354. [Google Scholar] [CrossRef]
- Maślanka, M. Optimised semi-active tuned mass damper with acceleration and relative motion feedbacks. Mech. Syst. Signal Process. 2019, 130, 707–731. [Google Scholar] [CrossRef]
- Maślanka, M. Measured performance of a semi-active tuned mass damper with acceleration feedback. In Proceedings of the Active and Passive Smart Structures and Integrated Systems, Portland, OR, USA, 25–29 March 2017; Volume 10164, p. 1016423. [Google Scholar]
- Krenk, S. Frequency analysis of the tuned mass damper. J. Appl. Mech. 2005, 72, 936–942. [Google Scholar] [CrossRef]
- Tseng, H.E.; Hedrick, J.K. Semi-active control laws-optimal and sub-optimal. Veh. Syst. Dyn. 1994, 23, 545–569. [Google Scholar] [CrossRef]
- Weber, F.; Boston, C. Clipped viscous damping with negative stiffness for semi-active cable damping. Smart Mater. Struct. 2011, 20, 045007. [Google Scholar] [CrossRef]
- Weber, F.; Boston, C.; Maślanka, M. An adaptive tuned mass damper based on the emulation of positive and negative stiffness with an MR damper. Smart Mater. Struct. 2011, 20, 015012. [Google Scholar] [CrossRef]
- Krylov, N.M.; Bogoliubov, N.N. Introduction to Non-Linear Mechanics; Princeton University Press: Princeton, NJ, USA, 1955. [Google Scholar]
- Tunç, C.; Tunç, O. A note on the stability and boundedness of solutions to non-linear differential systems of second order. J. Assoc. Arab. Univ. Basic Appl. Sci. 2017, 24, 169–175. [Google Scholar] [CrossRef]
- Høgsberg, J. The role of negative stiffness in semi-active control of magneto-rheological dampers. Struct. Control Health Monit. 2011, 18, 289–304. [Google Scholar] [CrossRef]











| K | ||||||
|---|---|---|---|---|---|---|
| 1.5 | 1.0585 | 1.0582 | 1.0582 | 1.0285 | 1.0283 | 1.0283 |
| 2 | 1.3336 | 1.3331 | 1.3321 | 1.1546 | 1.1539 | 1.1530 |
| 2.4 | 2.0131 | 2.0058 | 1.9934 | 1.4201 | 1.4177 | 1.4129 |
| 2.6 | 2.9001 | 2.8751 | 2.8307 | 1.7085 | 1.7019 | 1.6891 |
| 2.8 | 5.6752 | 5.5289 | 5.2808 | 2.3970 | 2.3679 | 2.3161 |
| 2.9 | 11.715 | 10.991 | 9.8577 | 3.4490 | 3.3446 | 3.1709 |
| 2.98 | 106.41 | 62.555 | 35.590 | 10.407 | 7.9897 | 6.0348 |
| 3 | 1239.4 | 890.90 | 106.90 | 35.534 | 30.165 | 10.463 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maślanka, M. Calibration of Viscous Damping–Stiffness Control Force in Active and Semi-Active Tuned Mass Dampers for Reduction of Harmonic Vibrations. Appl. Sci. 2023, 13, 11645. https://doi.org/10.3390/app132111645
Maślanka M. Calibration of Viscous Damping–Stiffness Control Force in Active and Semi-Active Tuned Mass Dampers for Reduction of Harmonic Vibrations. Applied Sciences. 2023; 13(21):11645. https://doi.org/10.3390/app132111645
Chicago/Turabian StyleMaślanka, Marcin. 2023. "Calibration of Viscous Damping–Stiffness Control Force in Active and Semi-Active Tuned Mass Dampers for Reduction of Harmonic Vibrations" Applied Sciences 13, no. 21: 11645. https://doi.org/10.3390/app132111645