
Optimal Control Strategy for Floating Offshore Wind Turbines Based on Grey Wolf Optimizer


Abstract
:1. Introduction
- Proposed a self-tuning improved version of the GSPI that reduces platform movement by more than 50%.
- Using the grey wolf optimizer (GWO) [17] algorithm intelligence, the OGSPI parameters are obtained with low effort.
2. System Modeling
2.1. Aerodynamic Model
2.2. Mechanical Model
2.3. Electric Model
3. The Control System
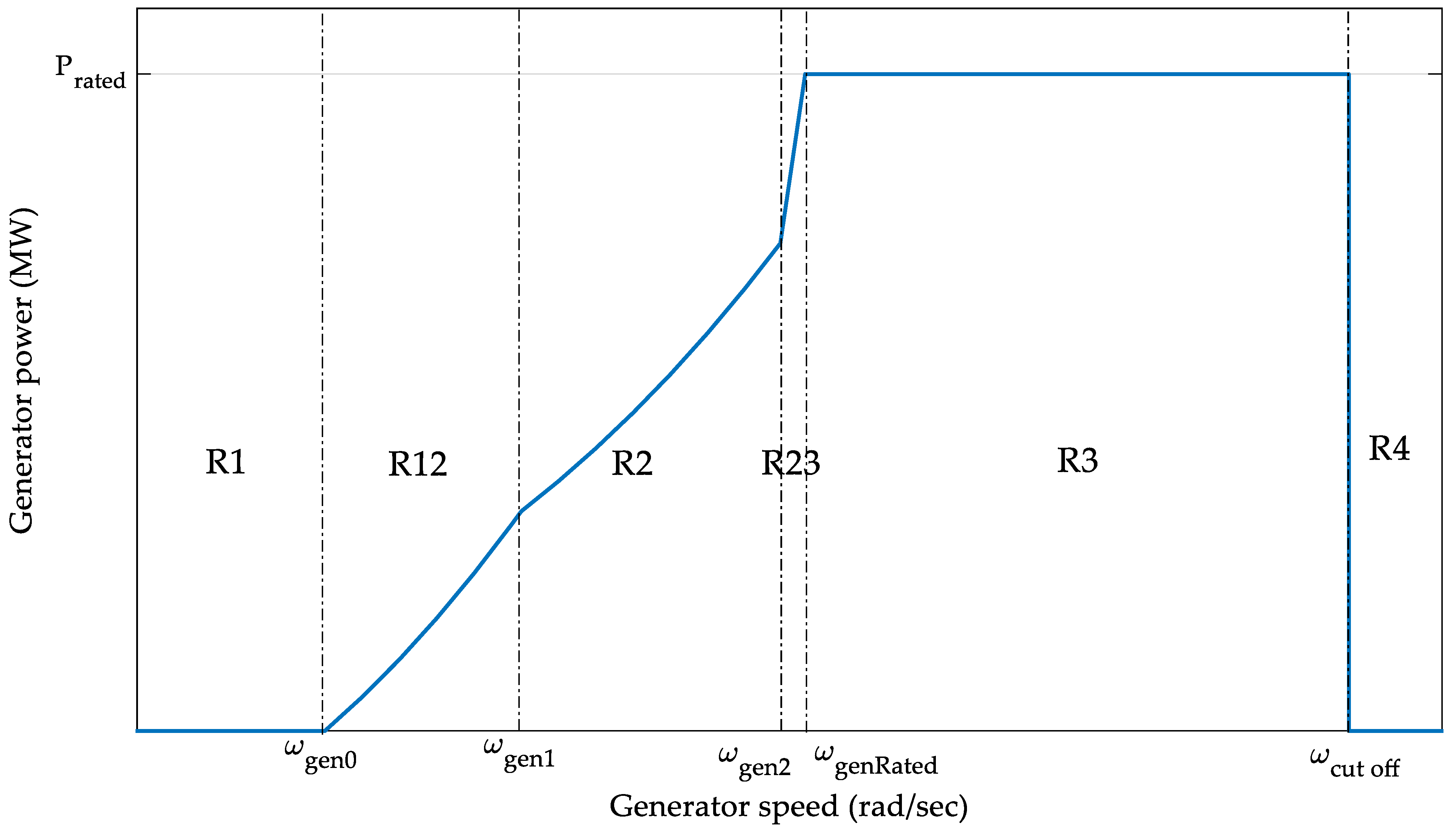
- Region 1: the generator speed is below the starting value (ωgen0), the generator torque is zero, and no power is collected. Instead, the wind is utilized to speed the rotor during the start-up process.
- Region 2: the generator torque is proportional to the square of the generator speed, which is between the transitional generator speed between R12 and R2 (ωgen1) and the transitional generator speed between R2 and R23 (ωgen2). The control technique in this area should employ an MPPT method to optimize the produced power. The torque expression can be expressed as follows:
- where kmppt is the MPPT gain.
- Region 12: when linear transit is provided between R1 and R12, the generator speed is linearly limited between ωgen0 and ωgen1.
- Region 3: because the power must be kept constant at the rated generator speed (ωgenRated), the torque is inversely proportional to the generator speed.
- where Prated is the rated generator power.
- Region 23: the generator speed is linearly limited to the tip –speed of rated power between ωgen2 and ωgenRated.
- Region 4: if the wind speed exceeds the cut-off value (ωcut off), the wind turbine is deactivated in order to safeguard itself.
3.1. PI Controller
3.2. Gain-Scheduled PI (GSPI) Controller
3.3. The Proposed Controller
3.3.1. Encircling Prey
3.3.2. Hunting Prey
4. Results and Discussion
4.1. Simulation Results Comparison
- GWO provided the best result (lower fitness value) of 169.964, outperforming all the other algorithms, including HHO with a result of 169.976 and WOA with a result of 170.341.
- The GWO algorithm showed good robustness, as demonstrated by a standard deviation (STD) of 3.913. This is confirmed by the mean value (170.423) and max value (171.035), which are close to the best result (169.964). The COOT also provided a good STD indicator at 4.726. However, the mean value is relatively significant, meaning the COOT is trapped in a local solution.
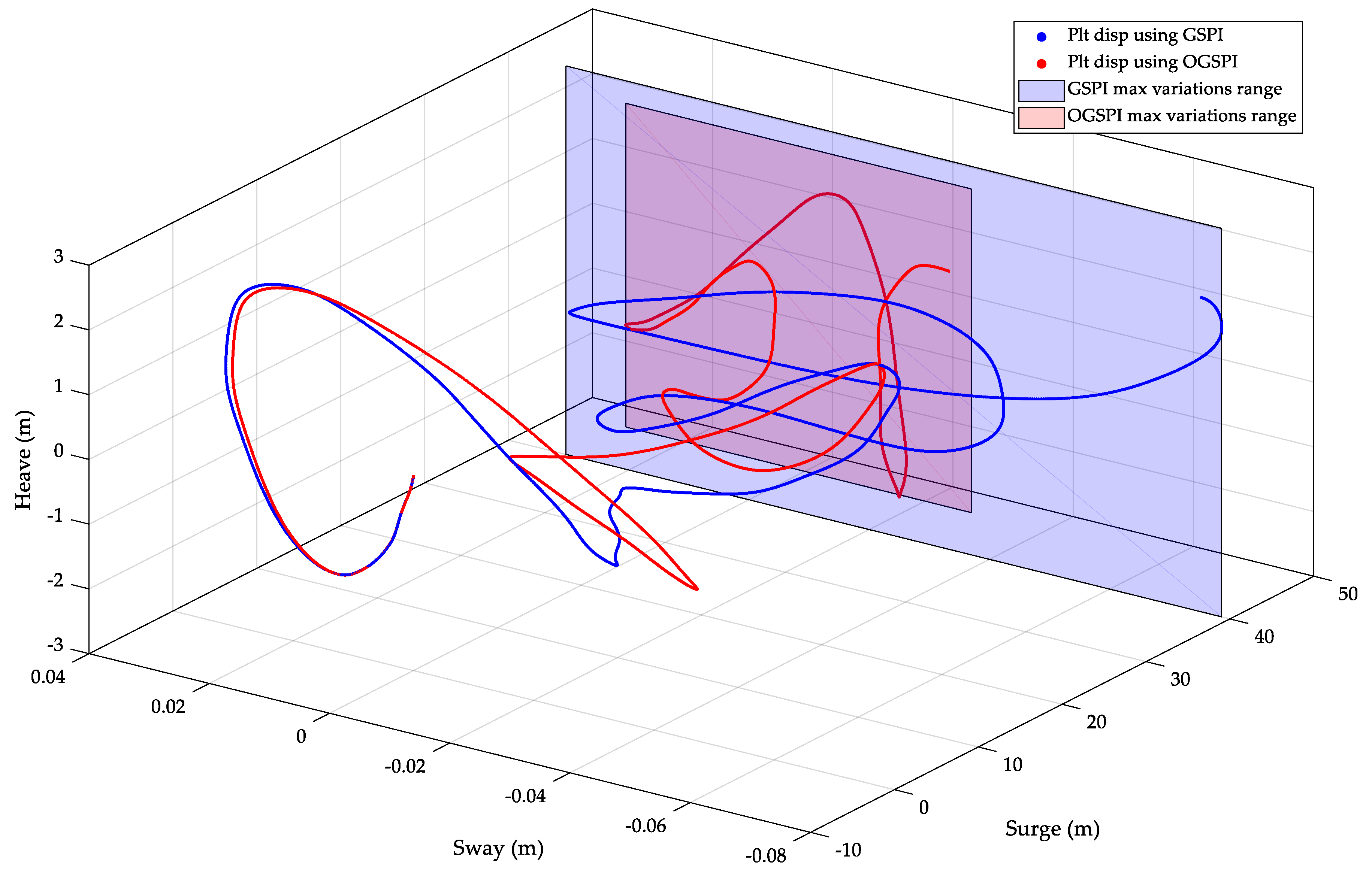
- The GWO provided the best motion reduction ratio (16.118), which approves its contribution to finding the best parameters for reducing the platform motions.
- Compared to the best outcomes produced by each algorithm (except for the AVOA), the total of the square platform motions acquired by the traditional GSPI approach is 203.170, which is much higher. These results clearly highlight a significant difference between the classical GSPI method and the OGSPI provided by the metaheuristic optimization algorithms.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AVOA | COOT | HHO | SCA | WOA | GWO | |
|---|---|---|---|---|---|---|
| Best | 174.860 | 171.984 | 169.976 | 172.982 | 170.341 | 169.964 |
| Worst | 303.036 | 183.337 | 219.602 | 224.354 | 235.826 | 171.035 |
| Mean | 220.961 | 175.095 | 180.612 | 187.261 | 184.147 | 170.423 |
| STD | 52.901 | 4.726 | 21.808 | 21.141 | 28.896 | 3.913 |
| Best kp | 0.0104767 | 0.0092126 | 0.0096815 | 0.0088913 | 0.0107274 | 0.0093141 |
| Best ki | 0.0176733 | 0.0166215 | 0.0176835 | 0.0153915 | 0.0197864 | 0.0171811 |
| η (%) | −8.757 | 13.818 | 11.10 | 7.8304 | 9.363 | 16.118 |
4.2. Computational Complexity Analysis
4.3. OGSPI vs. Classical GSPI
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barooni, M.; Ashuri, T.; Velioglu Sogut, D.; Wood, S.; Ghaderpour Taleghani, S. Floating Offshore Wind Turbines: Current Status and Future Prospects. Energies 2022, 16, 2. [Google Scholar] [CrossRef]
- Barthelmie, R.J.; Larsen, G.C.; Pryor, S.C. Modeling Annual Electricity Production and Levelized Cost of Energy from the US East Coast Offshore Wind Energy Lease Areas. Energies 2023, 16, 4550. [Google Scholar] [CrossRef]
- O’Kelly, B.C.; Arshad, M. Offshore Wind Turbine Foundations—Analysis and Design. In Offshore Wind Farms; Elsevier: Amsterdam, The Netherlands, 2016; pp. 589–610. [Google Scholar]
- Mills, S.B.; Bessette, D.; Smith, H. Exploring Landowners’ Post-Construction Changes in Perceptions of Wind Energy in Michigan. Land Use Policy 2019, 82, 754–762. [Google Scholar] [CrossRef]
- Schallenberg-Rodríguez, J.; García Montesdeoca, N. Spatial Planning to Estimate the Offshore Wind Energy Potential in Coastal Regions and Islands. Practical Case: The Canary Islands. Energy 2018, 143, 91–103. [Google Scholar] [CrossRef]
- Filgueira-Vizoso, A.; Cordal-Iglesias, D.; Puime-Guillén, F.; Lamas-Galdo, I.; Martínez-Rubio, A.; Larrinaga-Calderón, I.; Castro-Santos, L. Sensitivity Study of the Economics of a Floating Offshore Wind Farm. The Case Study of the SATH® Concrete Platform in the Atlantic Waters of Europe. Energy Rep. 2023, 9, 2604–2617. [Google Scholar] [CrossRef]
- Kaldellis, J.K.; Apostolou, D. Life Cycle Energy and Carbon Footprint of Offshore Wind Energy. Comparison with Onshore Counterpart. Renew. Energy 2017, 108, 72–84. [Google Scholar] [CrossRef]
- Yang, C.; Jia, J.; He, K.; Xue, L.; Jiang, C.; Liu, S.; Zhao, B.; Wu, M.; Cui, H. Comprehensive Analysis and Evaluation of the Operation and Maintenance of Offshore Wind Power Systems: A Survey. Energies 2023, 16, 5562. [Google Scholar] [CrossRef]
- Faraggiana, E.; Sirigu, M.; Ghigo, A.; Bracco, G.; Mattiazzo, G. An Efficient Optimisation Tool for Floating Offshore Wind Support Structures. Energy Rep. 2022, 8, 9104–9118. [Google Scholar] [CrossRef]
- Grasu, G.; Liu, P. Risk Assessment of Floating Offshore Wind Turbine. Energy Rep. 2023, 9, 1–18. [Google Scholar] [CrossRef]
- Sang, L.Q.; Li, Q.; Maeda, T.; Kamada, Y.; Huu, D.N.; Tran, Q.T. Sanseverino, ER Study Method of Pitch-Angle Control on Load and the Performance of a Floating Offshore Wind Turbine by Experiments. Energies 2023, 16, 2762. [Google Scholar] [CrossRef]
- Jonkman, J. Influence of Control on the Pitch Damping of a Floating Wind Turbine. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reston, VA, USA, 7 January 2008. [Google Scholar]
- Bagherieh, O.; Nagamune, R. Gain-Scheduling Control of a Floating Offshore Wind Turbine above Rated Wind Speed. Control Theory Technol. 2015, 13, 160–172. [Google Scholar] [CrossRef]
- Schlipf, D.; Simley, E.; Lemmer, F.; Pao, L.; Cheng, P.W. Collective Pitch Feedforward Control of Floating Wind Turbines Using Lidar. J. Ocean Wind Energy 2015, 2, 223–230. [Google Scholar] [CrossRef]
- Mendoza, N.; Robertson, A.; Wright, A.; Jonkman, J.; Wang, L.; Bergua, R.; Ngo, T.; Das, T.; Odeh, M.; Mohsin, K.; et al. Verification and Validation of Model-Scale Turbine Performance and Control Strategies for the IEA Wind 15 MW Reference Wind Turbine. Energies 2022, 15, 7649. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L. FAST Users Guide NREL; National Renewable Energy Lab.: Golden, CO, USA, 2005. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris Hawks Optimization: Algorithm and Applications. Futur. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Abdollahzadeh, B.; Gharehchopogh, F.S.; Mirjalili, S. African Vultures Optimization Algorithm: A New Nature-Inspired Metaheuristic Algorithm for Global Optimization Problems. Comput. Ind. Eng. 2021, 158, 107408. [Google Scholar] [CrossRef]
- Naruei, I.; Keynia, F. A New Optimization Method Based on COOT Bird Natural Life Model. Expert Syst. Appl. 2021, 183, 115352. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Guenoune, I.; Plestan, F.; Chermitti, A.; Evangelista, C. Modeling and Robust Control of a Twin Wind Turbines Structure. Control Eng. Pract. 2017, 69, 23–35. [Google Scholar] [CrossRef]
- Hu, S.; Song, B. Optimal Control Strategies of Wind Turbines for Load Reduction. In Modeling and Modern Control of Wind Power; Wiley: Hoboken, NJ, USA, 2017; pp. 63–83. [Google Scholar]
- Afsharnia, S. Contrôle Vectoriel Des Machines Synchrones à Aimants Permanents: Identification Des Paramètres et Minimisation Des Ondulations de Couple. Ph.D. Thesis, Institut National Polytechnique de Lorraine, Nancy, France, 2018. [Google Scholar]
- Tiwari, R.; Babu, N.R. Recent Developments of Control Strategies for Wind Energy Conversion System. Renew. Sustain. Energy Rev. 2016, 66, 268–285. [Google Scholar] [CrossRef]
- Navarrete, E.C.; Trejo Perea, M.; Jauregui Correa, J.C.; Carrillo Serrano, R.V.; Moreno, G.J.R. Expert Control Systems Implemented in a Pitch Control of Wind Turbine: A Review. IEEE Access 2019, 7, 13241–13259. [Google Scholar] [CrossRef]
- Hwas, A.; Katebi, R. Wind Turbine Control Using PI Pitch Angle Controller. IFAC Proc. Vol. 2012, 45, 241–246. [Google Scholar] [CrossRef]
- Hansen, M.H.; Hansen, A.; Larsen, T.J.; Øye, S.; Sørensen, P.; Fuglsang, P. Control Design for a Pitch-Regulated, Variable Speed Wind Turbine; Riso National Laboratory: Roskilde, Denmark, 2005; Vol. 1500, ISBN 8755034098. [Google Scholar]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; National Renewable Energy Lab.: Golden, CO, USA, 2007. [Google Scholar]
- Pierson, W.J.; Moskowitz, L. A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of S. A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Igwemezie, V.; Mehmanparast, A.; Kolios, A. Current Trend in Offshore Wind Energy Sector and Material Requirements for Fatigue Resistance Improvement in Large Wind Turbine Support Structures—A Review. Renew. Sustain. Energy Rev. 2019, 101, 181–196. [Google Scholar] [CrossRef]










| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Turbine parameters (NREL 5MW ITI energy barge) | |||
| The radius of wind turbine | R | 63 | m |
| Air density | ρ | 1.225 | kg/m3 |
| Optimal tip–speed ratio | λopt | 9.7 | |
| Wind turbine inertia moment | Jtr | 115,926 | kg.m2 |
| Maximum power coefficient | Cpmax | 0.465 | |
| Wind cut in speed | Vcut_in | 3 | m/s |
| Wind rated speed | Vrated | 11.4 | m/s |
| Wind cut out speed | Vcut_out | 25 | m/s |
| Generator reference speed | ωref | 1173.7 | rpm |
| MPPT gain | kmppt | 2.8805 | |
| Drivetrain parameters (NREL 5MW ITI energy barge) | |||
| Gearbox ratio | n | 97 | |
| Drivetrain torsional spring | ks | 8.67637 × 108 | Nm/rad |
| Drivetrain torsional damper | kd | 6.215 × 106 | Nm/(rad/s) |
| Environmental conditions | |||
| Significant wave height | Hs | 5 | m |
| Peak frequency of the significant wave height | fp | 12.4 | Hz |
| Wind speed | Vw | 13 | m/s |
| Parameter | Complexity for a Single Iteration | Complexity for All Iterations | Elapsed Time (s) |
|---|---|---|---|
| AVOA | O(Npop,D) | O(Npop,D,Tmax) | 298.44 |
| COOT | O(Npop,D) | O(Npop,D,Tmax) | 777.52 |
| HHO | O(Npop,D) | O(Npop,D,Tmax) | 2947.40 |
| SCA | O(Npop,D) | O(Npop,D,Tmax) | 1594.34 |
| WOA | O(Npop,D) | O(Npop,D,Tmax) | 1544.83 |
| GWO | O(Npop,D) | O(Npop,D,Tmax) | 1192.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferahtia, S.; Houari, A.; Machmoum, M.; Ait-Ahmed, M.; Saim, A. Optimal Control Strategy for Floating Offshore Wind Turbines Based on Grey Wolf Optimizer. Appl. Sci. 2023, 13, 11595. https://doi.org/10.3390/app132011595
Ferahtia S, Houari A, Machmoum M, Ait-Ahmed M, Saim A. Optimal Control Strategy for Floating Offshore Wind Turbines Based on Grey Wolf Optimizer. Applied Sciences. 2023; 13(20):11595. https://doi.org/10.3390/app132011595
Chicago/Turabian StyleFerahtia, Seydali, Azeddine Houari, Mohamed Machmoum, Mourad Ait-Ahmed, and Abdelhakim Saim. 2023. "Optimal Control Strategy for Floating Offshore Wind Turbines Based on Grey Wolf Optimizer" Applied Sciences 13, no. 20: 11595. https://doi.org/10.3390/app132011595