
Artificial Intelligence-Enabled Exploratory Cyber-Physical Safety Analyzer Framework for Civilian Urban Air Mobility
 , , , and
, , , and
Abstract
:1. Introduction
1.1. Motivation and Challenges
- First, the prediction of UAM cyberattacks must be taken as a fraction of the time (e.g., 1–10 ms). Then, the question is how we can meet such a requirement while, in general, AI mechanisms are computationally expensive.
- Second, designing a lightweight AI mechanism can be one of the suitable methods, where offline training and online execution can solve such challenges. However, it is hard to detect the root cause of cyberattacks dynamically when a pretrained model is used. Now, the challenge is how to ensure analyticity so that the UAM service providers can autonomously find the risk of theft and crashes.
- Finally, an AI-enabled exploratory cyber-physical safety analyzer framework for civilian UAM operations can overcome the above challenges. However, it is imperative to meet the distinct characteristics of several UAM examples, since the manufacturing and working principles vary among them.
1.2. Contributions
- First, we design an AI-enabled exploratory cyber-physical safety analyzer framework for civilian UAM operations. The proposed framework can predict, analyze, and protect civilian UAM from cyber threats by detecting jamming and spoofing through analyzing the control message and attitude observation.
- Second, we apply AI algorithms such as decision trees [9], random forests [10], logistic regression [11], K-nearest neighbors (KNN) [12], and long short-term memory (LSTM) [13] for predicting and detecting cyber jamming and spoofing attacks for civilian UAM. We analyze the performance of the applied AI algorithms using the state-of-the-art UAV attack dataset [14].
- Third, we devise a security analyzer that can determine conditional dependencies by the Pearson’s correlation coefficient [15] among the control messages and attacks based on the outcome of the AI algorithm. In particular, the security analyzer can characterize the abnormal behavior of UAM attitude control and radio frequency-based signals to protect commercial UAVs from theft and crashes.
- Finally, we conduct rigorous experimental analysis of the proposed AI-enabled exploratory cyber-physical safety framework. We have found that almost all of the causes of jamming and spoofing attacks can be detected and verified by the proposed system, which can reduce the risk of theft and crashes in commercial UAVs.
2. Related Works
3. System Model and Problem Description
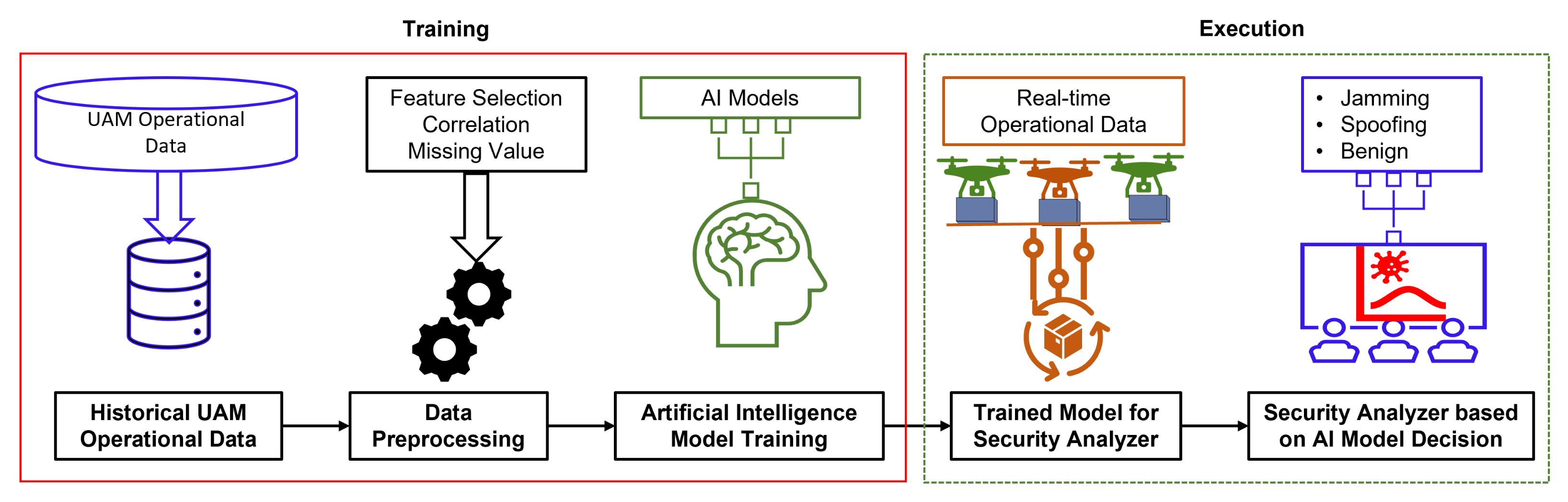
4. Proposed Exploratory Cyber-Physical Safety Analyzer Framework
- Offline training (red rectangle in Figure 2)
- 1.
- Collect historical UAM operational data;
- 2.
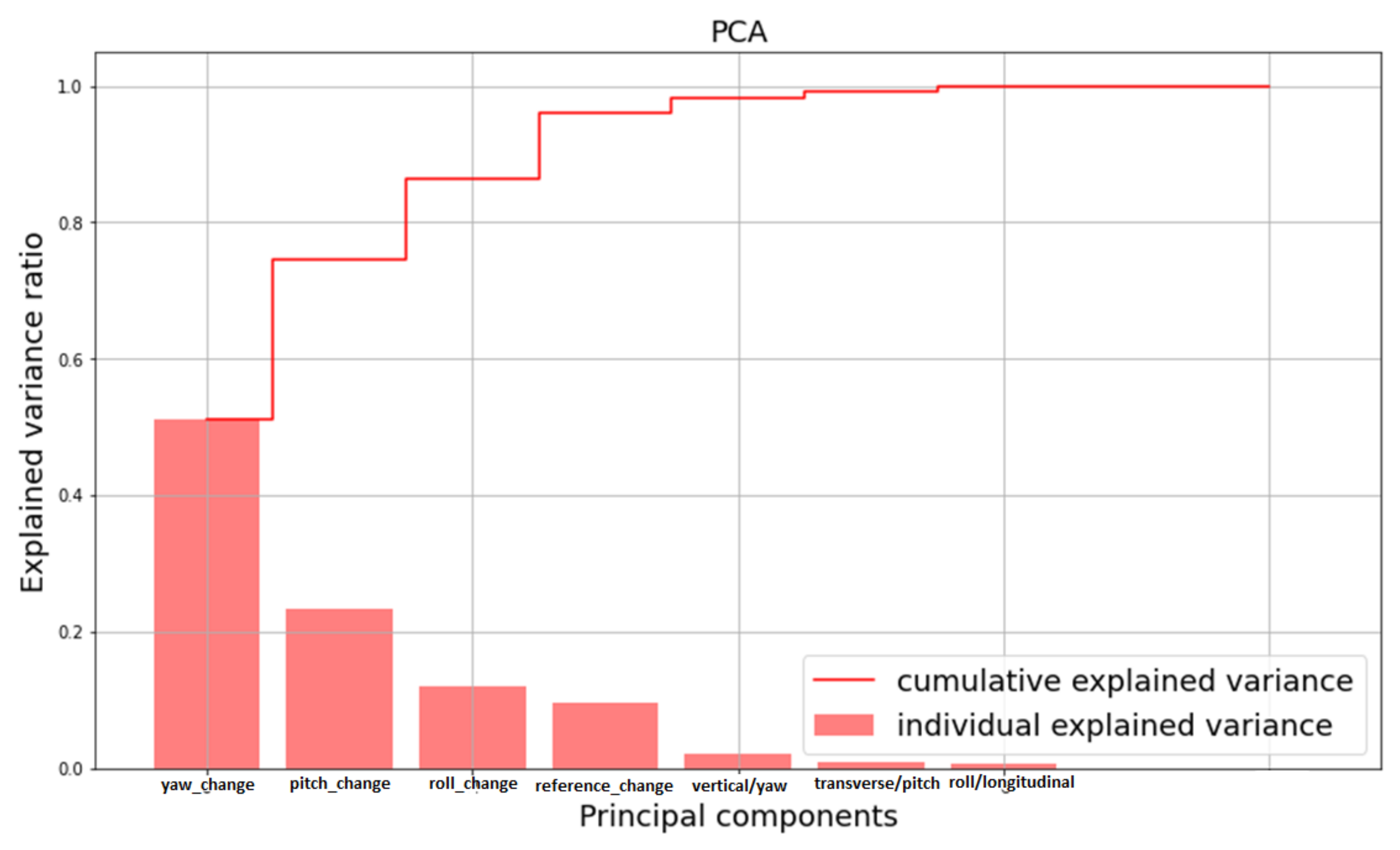
- Preprocessing historical datasets for feature selection and missing value interpretation through averaging;
- 3.
- 4.
- Save the trained models.
- Real-time execution and analyzing threats (green-dashed rectangle in Figure 2)
- 1.
- Load the trained model and use real-time UAM operational data for predicting cyber threats such as jamming and spoofing;
- 2.
- 3.
- Take necessary actions using the findings.
5. Experimental Analysis
5.1. Experiment Set-Up and Dataset Description
5.2. Evaluation Metric and Methodology
5.3. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yahuza, M.; Idris, M.Y.; Ahmedy, I.B.; Wahab, A.W.; Nandy, T.; Noor, N.M.; Bala, A. Internet of drones security and privacy issues: Taxonomy and open challenges. IEEE Access 2021, 9, 57243–57270. [Google Scholar] [CrossRef]
- Wang, C.-N.; Yang, F.-C.; Vo, N.T.M.; Nguyen, V.T.T. Wireless Communications for Data Security: Efficiency Assessment of Cybersecurity Industry—A Promising Application for UAVs. Drones 2022, 6, 363. [Google Scholar] [CrossRef]
- Tsao, K.Y.; Girdler, T.; Vassilakis, V.G. A survey of cyber security threats and solutions for UAV communications and flying ad-hoc networks. Ad Hoc Netw. 2022, 23, 102894. [Google Scholar] [CrossRef]
- Aloqaily, M.; Hussain, R.; Khalaf, D.; Slehat, D.; Oracevic, A. On the role of futuristic technologies in securing UAV-supported autonomous vehicles. IEEE Consum. Electron. Mag. 2022, 11, 93–105. [Google Scholar] [CrossRef]
- Shrestha, R.; Omidkar, A.; Roudi, S.A.; Abbas, R.; Kim, S. Machine-Learning-Enabled Intrusion Detection System for Cellular Connected UAV Networks. Electronics 2021, 10, 1549. [Google Scholar] [CrossRef]
- Ok, M.; Ok, S.; Park, J.H. Estimation of Vehicle Attitude, Acceleration, and Angular Velocity Using Convolutional Neural Network and Dual Extended Kalman Filter. Sensors 2021, 21, 1282. [Google Scholar] [CrossRef] [PubMed]
- Whelan, J.; Almehmadi, A.; Braverman, J.; El-Khatib, K. Threat Analysis of a Long Range Autonomous Unmanned Aerial System. In Proceedings of the 2020 International Conference on Computing and Information Technology (ICCIT-1441), Tabuk, Saudi Arabia, 9–10 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Rugo, A.; Ardagna, C.A.; Ioini, N.E. A Security Review in the UAVNet Era: Threats, Countermeasures, and Gap Analysis. ACM Comput. Surv. CSUR 2022, 55, 1–35. [Google Scholar] [CrossRef]
- Rokach, L.; Maimon, O. Decision trees. In Data Mining and Knowledge Discovery Handbook; Springer: Boston, MA, USA, 2005; pp. 165–192. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar]
- Kleinbaum, D.G.; Dietz, K.; Gail, M.; Klein, M.; Klein, M. Logistic Regression; Springer: New York, NY, USA, 2002. [Google Scholar]
- Guo, G.; Wang, H.; Bell, D.; Bi, Y.; Greer, K. KNN model-based approach in classification. In Proceedings of the OTM Confederated International Conferences “On the Move to Meaningful Internet Systems”, Rhodes, Greece, 21–25 October 2003; Springer: Berlin/Heidelberg, Germany, 2003; Volume 3, pp. 986–996. [Google Scholar]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef] [PubMed]
- Whelan, J.; Sangarapillai, T.; Minawi, O.; Almehmadi, A.; El-Khatib, K. UAV Attack Dataset [Internet]. IEEE Dataport 2020. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson correlation coefficient. In Noise Reduction in Speech Processing; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–4. [Google Scholar]
- Krishna, C.G.L.; Murphy, R.R. A review on cybersecurity vulnerabilities for unmanned aerial vehicles. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 194–199. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, S. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Bekmezci, I.; Senturk, E.; Turker, T. Security issues in flying ad-hoc networks (FANETS). J. Aeronaut. Space Technol. 2016, 9, 13–21. [Google Scholar]
- Xu, W.; Ma, K.; Trappe, W.; Zhang, Y. Jamming sensor networks: Attack and defense strategies. IEEE Netw. 2006, 20, 41–47. [Google Scholar] [CrossRef]
- Su, J.; He, J.; Cheng, P.; Chen, J. A stealthy GPS spoofing strategy for manipulating the trajectory of an unmanned aerial vehicle. IFAC-PapersOnLine 2016, 49, 291–296. [Google Scholar] [CrossRef]
- Javaid, A.Y.; Jahan, F.; Sun, W. Analysis of global positioning system-based attacks and a novel global positioning system spoofing detection/mitigation algorithm for unmanned aerial vehicle simulation. Simulation 2017, 93, 427–441. [Google Scholar] [CrossRef]
- Mitchell, R.; Chen, I.R. Adaptive intrusion detection of malicious unmanned air vehicles using behavior rule specifications. IEEE Trans. Syst. Man Cybern. Syst. 2013, 44, 593–604. [Google Scholar] [CrossRef]
- Whelan, J.; Sangarapillai, T.; Minawi, O.; Almehmadi, A.; El-Khatib, K. Novelty-based Intrusion Detection of Sensor Attacks on Unmanned Aerial Vehicles. In Proceedings of the 16th ACM Symposium on QoS and Security for Wireless and Mobile Networks (Q2SWinet ’20), Alicante, Spain, 16–20 November 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 23–28. [Google Scholar] [CrossRef]
- Kwon, C.; Yantek, S.; Hwang, I. Real-Time Safety Assessment of Unmanned Aircraft Systems against Stealthy Cyber Attacks. J. Aerosp. Inf. Syst. 2015, 13, 27–45. [Google Scholar] [CrossRef]
- Borri, A.; Bianchi, D.; Di Benedetto, M.D.; Di Gennaro, S. Vehicle attitude control with saturating actuators: Workload balancing and reference adaptation. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; Volume 10, pp. 1558–1563. [Google Scholar]
- Scikit-Learn. Supervised Learning. Available online: https://scikit-learn.org/stable/ (accessed on 10 October 2022).
- Scikit-Learn. sklearn.model_selection.GridSearchCV. Available online: https://scikit-learn.org/stable/modules/generated/sklearn.model_selection.GridSearchCV.html (accessed on 24 December 2022).
- Ajakwe, S.O.; Ihekoronye, V.U.; Kim, D.S.; Lee, J.M. Pervasive Intrusion Detection Scheme to Mitigate Sensor Attacks on UAV Networks. In Proceedings of the 2022 Summer Conference of the Korean Society of Communications and Communications, Jeju Island, Republic of Korea, 19–21 October 2022; pp. 1267–1268. [Google Scholar]
- Whelan, J.; Almehmadi, A.; El-Khatib, K. Artificial intelligence for intrusion detection systems in unmanned aerial vehicles. Comput. Electr. Eng. 2022, 99, 107784. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| K-range (KNN) | |
| Cross-validation (KNN) | 10 |
| N-neighbors (KNN) | 79 |
| C (logistic regression) | |
| Random state (random forest) | 42 |
| Cross-validation (random forest) | 5 |
| N-estimators (random forest) | 50 |
| Cross-validation (decision tree) | 10 |
| LSTM units in cell | 50 |
| No. of epochs (LSTM) | 100 |
| Batch size (LSTM) | 155 |
| AI Model | Precision | Recall | F1-Score | Accuracy (%) |
|---|---|---|---|---|
| KNN | 1 | 1 | 1 | 100 |
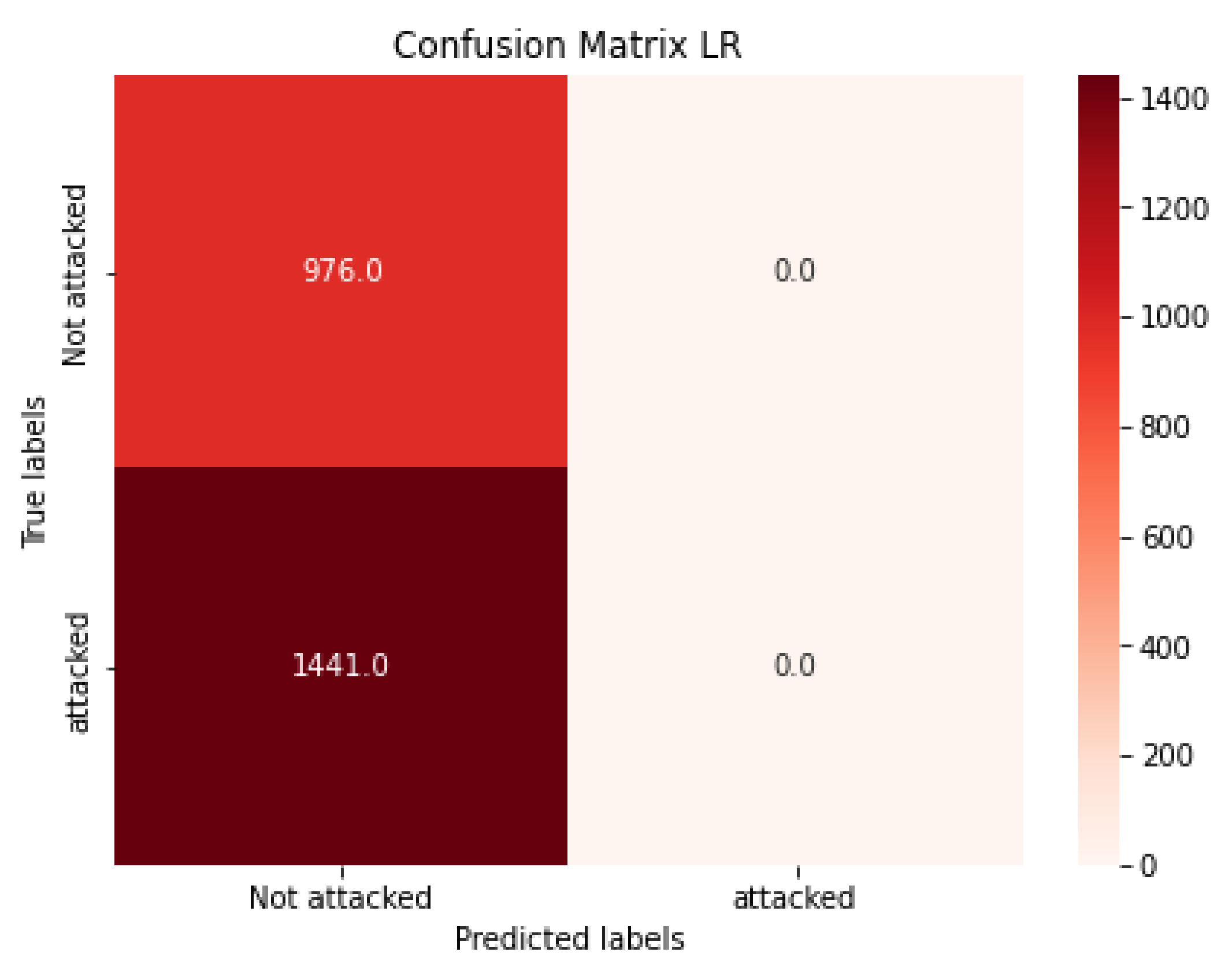
| Logistic regression | 0.40 | 1 | 0.58 | 40 |
| Random forest | 1 | 1 | 1 | 100 |
| Decision tree | 1 | 1 | 1 | 100 |
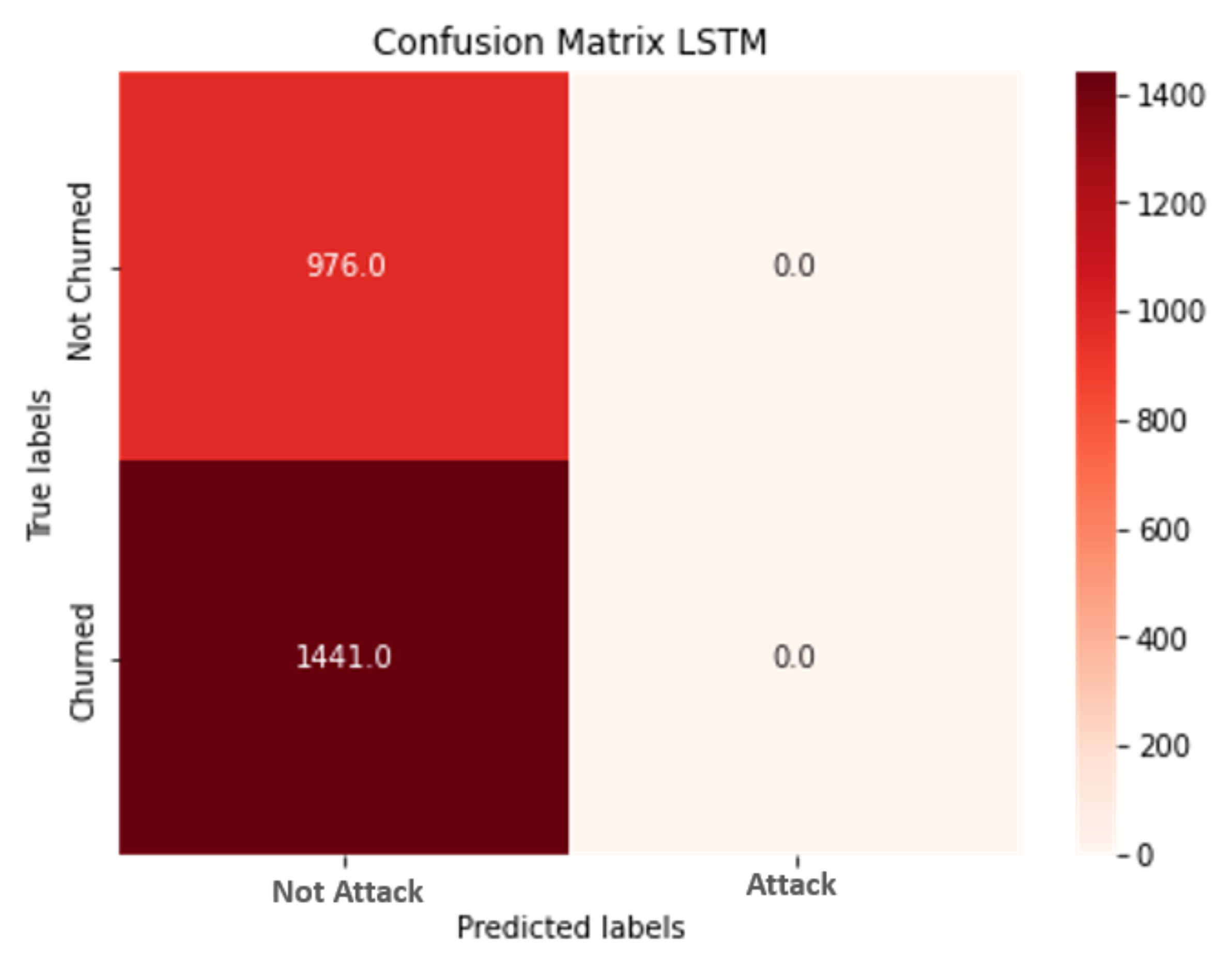
| LSTM | 0.40 | 0.52 | 0.45 | 40 |
| Reference | AI Model | Precision | Recall | F1-Score | Case |
|---|---|---|---|---|---|
| This Work | KNN | 1 | 1 | 1 | Spoofing or Jamming, Benign |
| This Work | Logistic regression | 0.40 | 1 | 0.58 | Spoofing or Jamming, Benign |
| This Work | Random forest | 1 | 1 | 1 | Spoofing or Jamming, Benign |
| This Work | Decision tree | 1 | 1 | 1 | Spoofing or Jamming, Benign |
| This Work | LSTM | 0.40 | 0.52 | 0.45 | Spoofing or Jamming, Benign |
| J. Whelan et al. [23] | Support vector machine | 0.69 | 0.96 | 0.80 | Spoofing (Malicious) |
| J. Whelan et al. [23] | Support vector machine | 0.99 | 0.99 | 0.99 | Spoofing (Benign) |
| J. Whelan et al. [23] | Local outlier factor | 0.04 | 1 | 0.08 | Spoofing (Malicious) |
| J. Whelan et al. [23] | Local outlier factor | 1 | 0.57 | 0.72 | Spoofing (Benign) |
| J. Whelan et al. [23] | Auto encoder neural network | 0.64 | 0.99 | 0.78 | Spoofing (Malicious) |
| J. Whelan et al. [23] | Auto encoder neural network | 0.99 | 0.98 | 0.99 | Spoofing (Benign) |
| S. I. Ajakwe et al. [28] | Support vector machine | NA | NA | 0.81 | Spoofing (Malicious) |
| S. I. Ajakwe et al. [28] | Support vector machine | NA | NA | 0.99 | Spoofing (Benign) |
| S. I. Ajakwe et al. [28] | Local outlier factor | NA | NA | 0.08 | Spoofing (Malicious) |
| S. I. Ajakwe et al. [28] | Local outlier factor | NA | NA | 0.73 | Spoofing (Benign) |
| S. I. Ajakwe et al. [28] | Autoencoder neural network | 0.69 | 0.99 | 0.85 | Spoofing (Malicious) |
| S. I. Ajakwe et al. [28] | Autoencoder neural network | 0.99 | 0.99 | 0.99 | Spoofing (Benign) |
| J. Whelan et al. [29] | Support vector machine | 1.00 | 0.66 | 0.80 | Spoofing (Malicious) |
| J. Whelan et al. [29] | Support vector machine | 0.94 | 1 | 0.97 | Spoofing (Benign) |
| J. Whelan et al. [29] | Local outlier factor | 0.92 | 0.76 | 0.83 | Spoofing (Malicious) |
| J. Whelan et al. [29] | Local outlier factor | 0.96 | 0.98 | 0.97 | Spoofing (Benign) |
| J. Whelan et al. [29] | Auto encoder neural network | 0.74 | 0.96 | 0.84 | Spoofing (Malicious) |
| J. Whelan et al. [29] | Auto encoder neural network | 0.99 | 0.94 | 0.97 | Spoofing (Benign) |
| J. Whelan et al. [29] | Support vector machine | 0.98 | 0.07 | 0.13 | Jamming (Malicious) |
| J. Whelan et al. [29] | Support vector machine | 0.99 | 0.99 | 0.99 | Jamming (Benign) |
| J. Whelan et al. [29] | Local outlier factor | 0.98 | 0.46 | 0.63 | Jamming (Malicious) |
| J. Whelan et al. [29] | Local outlier factor | 0.86 | 0.99 | 0.92 | Jamming (Benign) |
| J. Whelan et al. [29] | Auto encoder neural network | 0.84 | 0.99 | 0.91 | Jamming (Malicious) |
| J. Whelan et al. [29] | Auto encoder neural network | 0.99 | 0.94 | 0.97 | Jamming (Benign) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munir, M.S.; Dipro, S.H.; Hasan, K.; Islam, T.; Shetty, S. Artificial Intelligence-Enabled Exploratory Cyber-Physical Safety Analyzer Framework for Civilian Urban Air Mobility. Appl. Sci. 2023, 13, 755. https://doi.org/10.3390/app13020755
Munir MS, Dipro SH, Hasan K, Islam T, Shetty S. Artificial Intelligence-Enabled Exploratory Cyber-Physical Safety Analyzer Framework for Civilian Urban Air Mobility. Applied Sciences. 2023; 13(2):755. https://doi.org/10.3390/app13020755
Chicago/Turabian StyleMunir, Md. Shirajum, Sumit Howlader Dipro, Kamrul Hasan, Tariqul Islam, and Sachin Shetty. 2023. "Artificial Intelligence-Enabled Exploratory Cyber-Physical Safety Analyzer Framework for Civilian Urban Air Mobility" Applied Sciences 13, no. 2: 755. https://doi.org/10.3390/app13020755