
Buckling Behavior of Loosely Fitted Formed-In-Place Pipe Liner in Circular Host Pipe under External Pressure

Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Design
2.2. Finite Element Model Set-Up
2.3. Prediction Method of Critical Buckling Pressure
3. Results and Discussion
3.1. Finite Element Model Validation
3.2. Sensitive Analysis of Parameters
3.2.1. Effect of Dimension Ratio
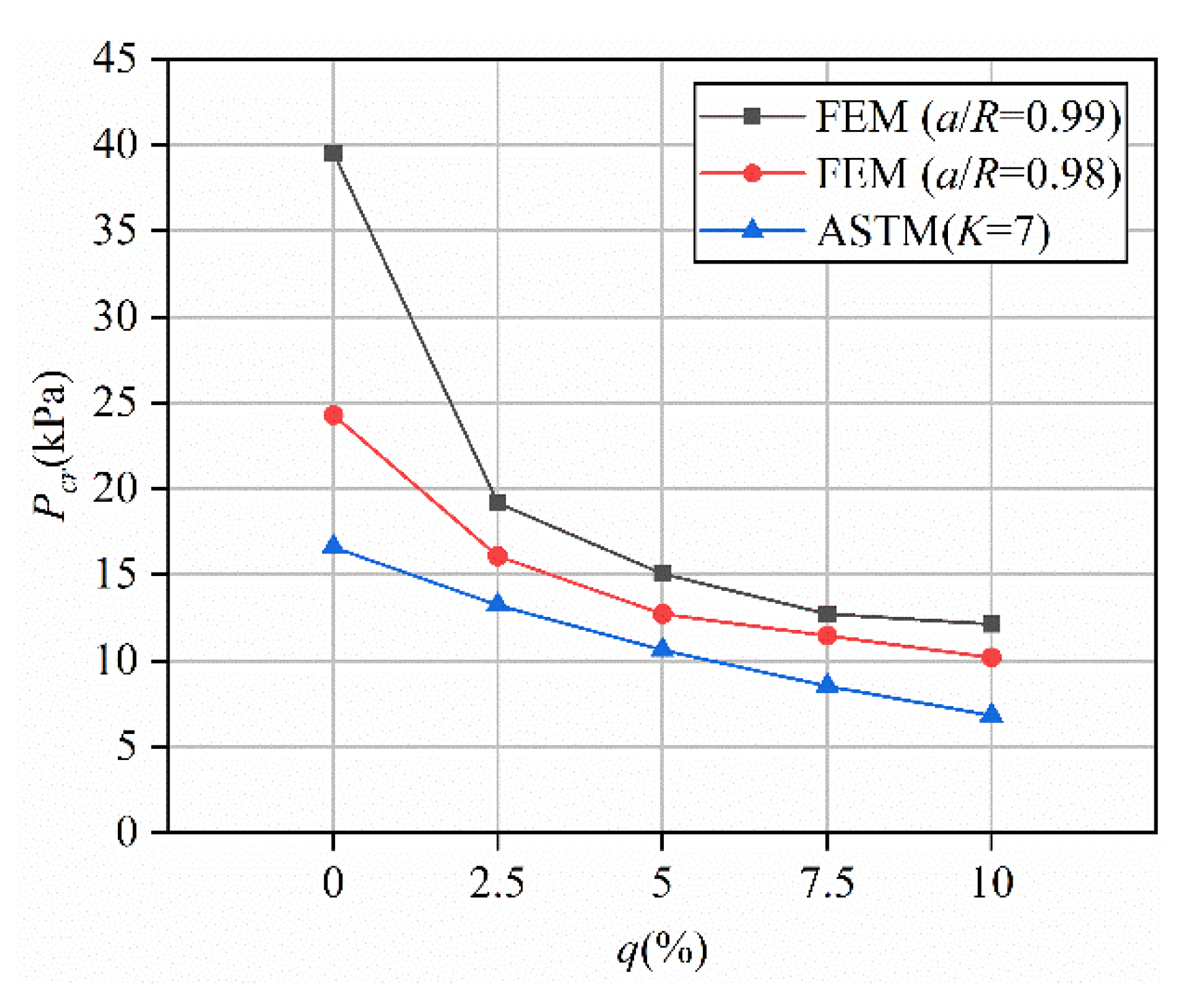
3.2.2. Effect of Ovality
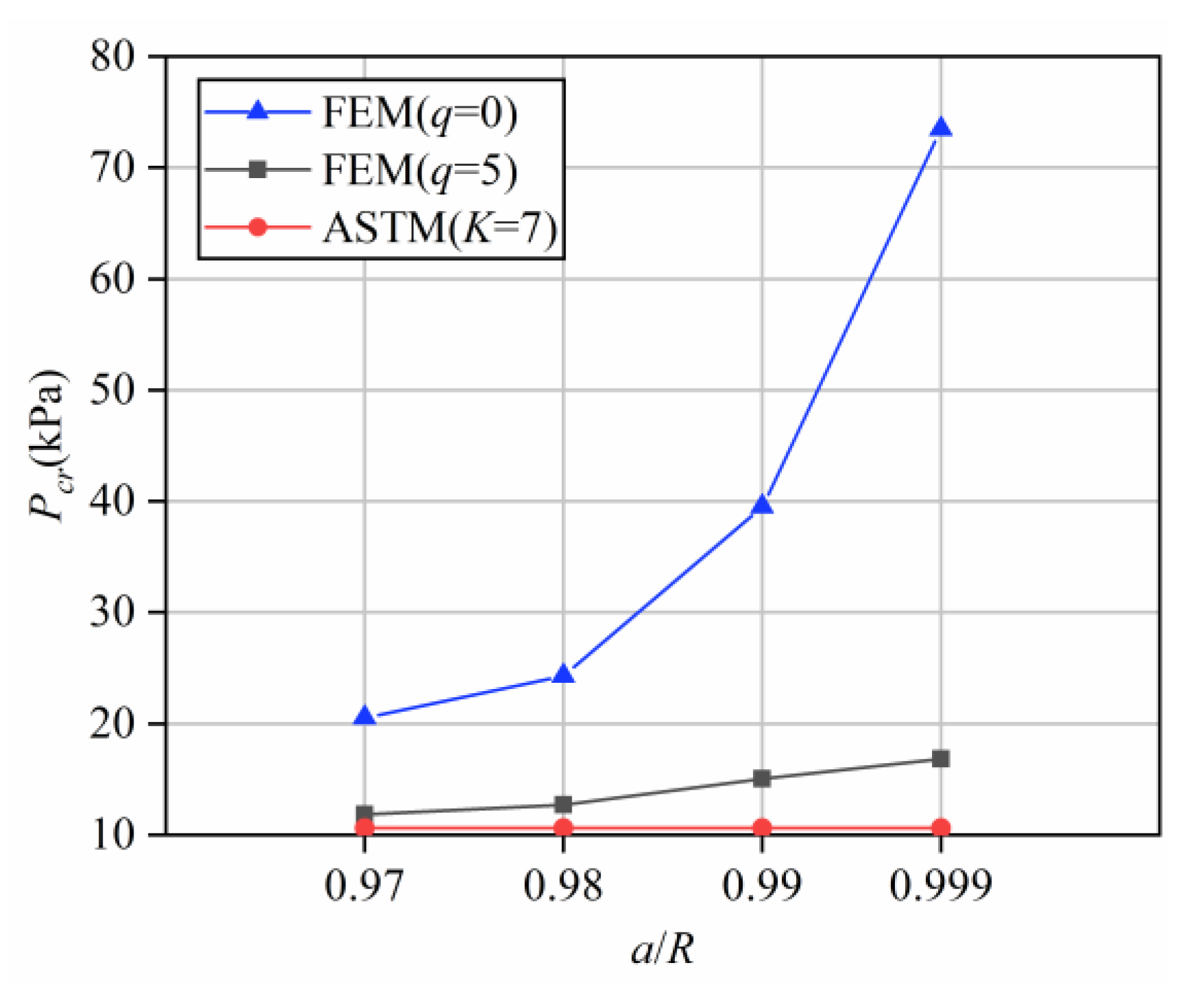
3.2.3. Effect of the Ratio of Liner Major Axis to Host Pipe Radius
3.3. Quantification of Enhancement Factor
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Amaechi, C.V.; Chesterton, C.; Butler, H.O.; Wang, F.; Ye, J. Review on the Design and Mechanics of Bonded Marine Hoses for Catenary Anchor Leg Mooring (CALM) Buoys. Ocean Eng. 2021, 242, 110062. [Google Scholar] [CrossRef]
- de Alegría, I.M.; Martín, J.L.; Kortabarria, I.; Andreu, J.; Ereño, P.I. Transmission Alternatives for Offshore Electrical Power. Renew. Sustain. Energy Rev. 2009, 13, 1027–1038. [Google Scholar] [CrossRef]
- Zhang, X.; Qi, Y.; Wang, Y.; Wu, J.; Lin, L.; Peng, H.; Qi, H.; Yu, X.; Zhang, Y. Effect of the Tap Water Supply System on China’s Economy and Energy Consumption, and Its Emissions’ Impact. Renew. Sustain. Energy Rev. 2016, 64, 660–671. [Google Scholar] [CrossRef]
- Rashid, S.S.; Liu, Y.-Q. Assessing Environmental Impacts of Large Centralized Wastewater Treatment Plants with Combined or Separate Sewer Systems in Dry/Wet Seasons by Using LCA. Env. Sci Pollut Res 2020, 27, 15674–15690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barbier, E.B.; Chaudhry, A.M. Urban Growth and Water. Water Resour. Econ. 2014, 6, 1–17. [Google Scholar] [CrossRef]
- Iurchenko, V.; Lebedeva, E.; Brigada, E. Environmental Safety of the Sewage Disposal by the Sewerage Pipelines. Procedia Eng. 2016, 134, 181–186. [Google Scholar] [CrossRef]
- Ma, B.; Najafi, M. Development and Applications of Trenchless Technology in China. Tunn. Undergr. Space Technol. 2008, 23, 476–480. [Google Scholar] [CrossRef]
- Najafi, M.; Gokhale, S.; Calderón, D.R.; Ma, B. Trenchless Technology: Pipeline and Utility Design, Construction, and Renewal, 2nd ed.; McGraw-Hill Education: New York, NY, USA, 2021; ISBN 978-1-260-45873-2. [Google Scholar]
- He, C.; Yan, X.; Ma, B.; Zhao, W.; Zhao, Y. Experimental and Numerical Simulation of Formed-in-Place Pipe Liner for Repairing Water Mains with Void. Tunn. Undergr. Space Technol. 2022, 130, 104752. [Google Scholar] [CrossRef]
- Timoshenko, S.; Gere, J.; Prager, W. Theory of Elastic Stability. J. Appl. Mech. 1962, 29, 220. [Google Scholar] [CrossRef]
- Glock, D. Post-Critical Behavior of a Rigidly Encased Circular Pipe Subject to External Water Pressure and Temperature Rise. Der Stahlbau 1977, 46, 212–217. [Google Scholar]
- Aggarwal, S.; Cooper, M. External Pressure Testing of Insituform Lining. Coventry Polytech. Coventry UK Intern. Rep. 1984. [Google Scholar]
- ASTM F1216–09; Standard Practice for Rehabilitation of Existing Pipelines and Conduits by the Inversion and Curing of a Resin–Impregnated Tube. ASTM International: West Conshohocken, PA, USA, 2009.
- Lo, K.H.; Zhang, J.Q. Collapse Resistance Modeling of Encased Pipes. ASTM Spec. Tech. Publ. 1994, 1222, 97. [Google Scholar]
- El-Sawy, K.; Moore, I.D. Stability of Loosely Fitted Liners Used to Rehabilitate Rigid Pipes. J. Struct. Eng. 1998, 124, 1350–1357. [Google Scholar] [CrossRef]
- Zhao, Y.; Ma, B.; Ariaratnam, S.T.; Yan, X.; Xiang, W.; Zhu, Z.; Li, Z.; Moghbel Esfahani, M. Buckling Behaviour of Internal Stiffened Thin-Walled Stainless Steel Liners under External Constraints. Tunn. Undergr. Space Technol. 2022, 129, 104685. [Google Scholar] [CrossRef]
- El-Sawy, K.M.; Elshafei, A.L. Neural Network for the Estimation of the Inelastic Buckling Pressure of Loosely Fitted Liners Used for Rigid Pipe Rehabilitation. Thin-Walled Struct. 2003, 41, 785–800. [Google Scholar] [CrossRef]
- Dong, S.; Zhou, W.; Zhang, H.; Ma, B. An Updated Structure for a Stainless Steel Liner and the Estimation of Its Buckling Strength. Tunn. Undergr. Space Technol. 2018, 72, 9–16. [Google Scholar] [CrossRef]
- Wang, J.H.; Koizumi, A. Experimental Investigation of Buckling Collapse of Encased Liners Subjected to External Water Pressure. Eng. Struct. 2017, 151, 44–56. [Google Scholar] [CrossRef]
- Li, Z.; Tang, F.; Chen, Y.; Zou, X. Stability of the Pipe-Liner System with a Grouting Void Surrounded by the Saturated Soil. Eng. Struct. 2019, 196, 109284. [Google Scholar] [CrossRef]
- El-Sawy, K.M. Inelastic Stability of Liners of Cylindrical Conduits with Local Imperfection under External Pressure. Tunn. Undergr. Space Technol. 2013, 33, 98–110. [Google Scholar] [CrossRef]
- Treitz, J.; Lan, H.; Moore, I.D.; Hoult, N.A. Testing and Analysis of PVC Liners under Simulated Grouting Pressure. Eng. Struct. 2022, 250, 113496. [Google Scholar] [CrossRef]
- Jiao, P.; Chen, Z.; Ma, H.; Zhang, D.; Ge, P. Buckling Analysis of Thin Rectangular FG-CNTRC Plate Subjected to Arbitrarily Distributed Partial Edge Compression Loads Based on Differential Quadrature Method. Thin-Walled Struct. 2019, 145, 106417. [Google Scholar] [CrossRef]
- Kabir, H.; Aghdam, M.M. A Robust Bézier Based Solution for Nonlinear Vibration and Post-Buckling of Random Checkerboard Graphene Nano-Platelets Reinforced Composite Beams. Compos. Struct. 2019, 212, 184–198. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length/mm | Internal Radius/mm | Wall Thickness/mm | ||
|---|---|---|---|---|
| Major Axis | Minor Axis | |||
| FIPP | 2000 | 309.85 | 287.15 | 7.95 |
| The host pipe | 2000 | 318 | 10 | |
| No. | a/R | q | DR |
|---|---|---|---|
| A | 0.974 | 3.8 | 75 |
| B-1 | 0.999 | 5 | 100 |
| B-2 | 0.999 | 0 | 100 |
| C-1 | 0.99 | 5 | 100 |
| C-2 | 0.99 | 5 | 150 |
| C-3 | 0.99 | 5 | 200 |
| C-4 | 0.99 | 5 | 250 |
| C-5 | 0.99 | 5 | 300 |
| C-6 | 0.99 | 0 | 100 |
| C-7 | 0.99 | 2.5 | 100 |
| C-8 | 0.99 | 7.5 | 100 |
| C-9 | 0.99 | 10 | 100 |
| D-1 | 0.98 | 5 | 100 |
| D-2 | 0.98 | 5 | 150 |
| D-3 | 0.98 | 5 | 200 |
| D-4 | 0.98 | 5 | 250 |
| D-5 | 0.98 | 5 | 300 |
| D-6 | 0.98 | 0 | 100 |
| D-7 | 0.98 | 2.5 | 100 |
| D-8 | 0.98 | 7.5 | 100 |
| D-9 | 0.98 | 10 | 100 |
| E-1 | 0.97 | 5 | 100 |
| E-2 | 0.97 | 0 | 100 |
| Materials | Modulus of Elasticity (MPa) | Poisson’s Ratio | Bending Strength |
|---|---|---|---|
| Steel pipe | 190,000 | 0.3 | / |
| FIPP | 2089.9 | 0.3 | 62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Z.; Yan, X.; Xiang, W.; Zhao, Y.; Ariaratnam, S.T. Buckling Behavior of Loosely Fitted Formed-In-Place Pipe Liner in Circular Host Pipe under External Pressure. Appl. Sci. 2023, 13, 679. https://doi.org/10.3390/app13020679
Zeng Z, Yan X, Xiang W, Zhao Y, Ariaratnam ST. Buckling Behavior of Loosely Fitted Formed-In-Place Pipe Liner in Circular Host Pipe under External Pressure. Applied Sciences. 2023; 13(2):679. https://doi.org/10.3390/app13020679
Chicago/Turabian StyleZeng, Zheng, Xuefeng Yan, Weigang Xiang, Yahong Zhao, and Samuel T. Ariaratnam. 2023. "Buckling Behavior of Loosely Fitted Formed-In-Place Pipe Liner in Circular Host Pipe under External Pressure" Applied Sciences 13, no. 2: 679. https://doi.org/10.3390/app13020679