
Adaptive Impedance Control for Force Tracking in Manipulators Based on Fractional-Order PID


Abstract
:1. Introduction
2. System Description
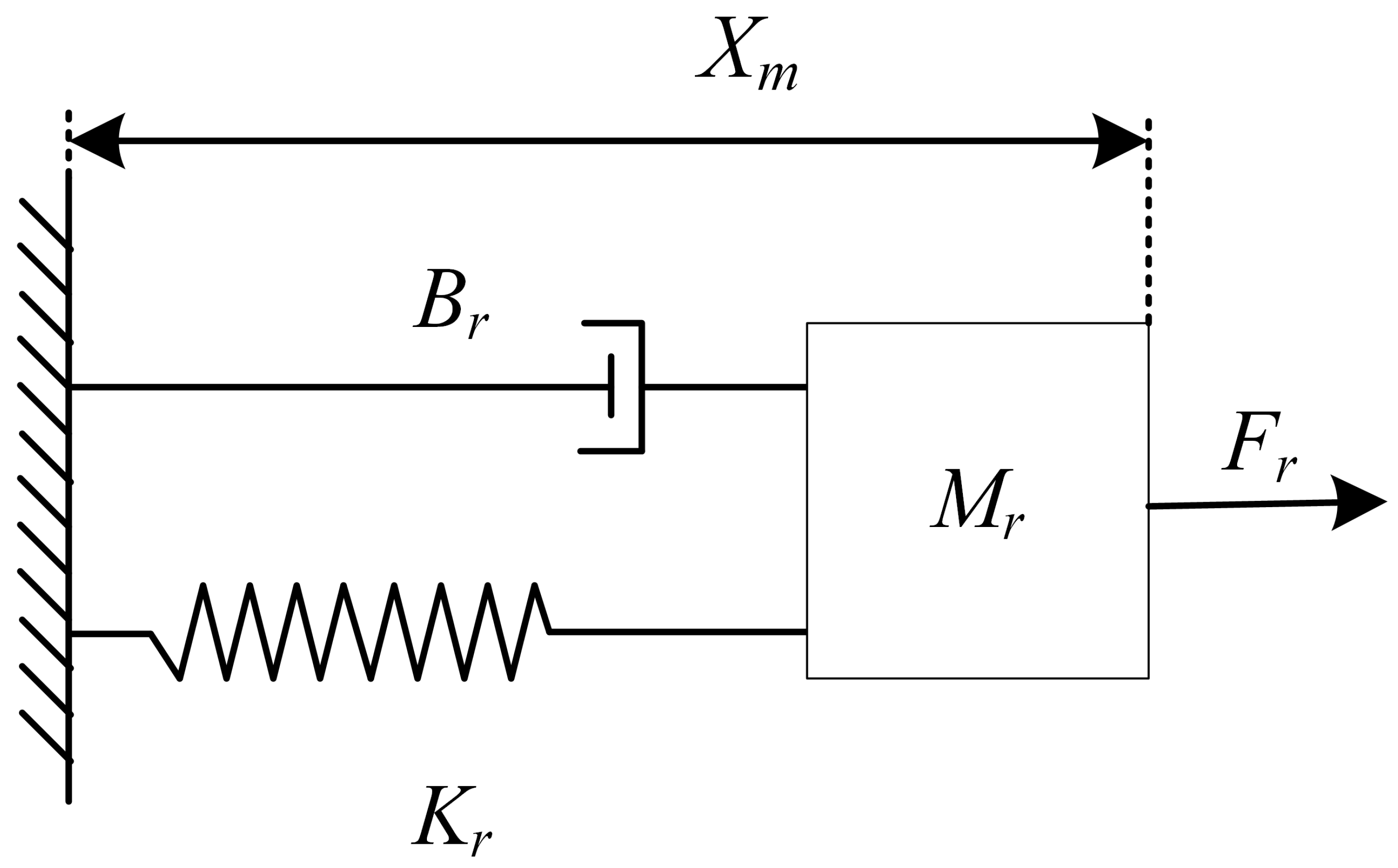
2.1. Force Interaction Model
- Stage I: linear motion in free space when approaching the environment.
- Stage II: a nonlinear region with significant overshoot and intense collision when contact occurs.
- Stage III: an approximately linear region where the contact force gradually stabilizes after contact.
2.2. Impedance Control Model
3. Adaptive Control System
3.1. Stability Analysis of Impedance Control Models
3.2. Adaptive Control Based on Environmental Information Estimation
4. Fractional-Order PID Adaptive Impedance Control
4.1. Control Method Design
4.2. Stability Analysis
5. Simulations and Analyses
5.1. Model of Manipulator
5.2. Algorithm Simulation
5.2.1. Control Robustness Simulation
5.2.2. Force Tracking Control Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mathe, S.E.; Pamarthy, A.C.; Kondaveeti, H.K.; Vappangi, S. A review on raspberry pi and its robotic applications. In Proceedings of the 2022 2nd International Conference on Artificial Intelligence and Signal Processing (AISP), Vijayawada, India, 12–14 February 2022; pp. 1–6. [Google Scholar]
- Ma, X.; Mao, C.; Liu, G. Can robots replace human beings?—Assessment on the developmental potential of construction robot. J. Build. Eng. 2022, 56, 104727. [Google Scholar] [CrossRef]
- Suzuki, T.; Yamada, S.; Kanda, T.; Nomura, T. Influence of Social Anxiety on People’s Preferences for Robots as Daily Life Communication Partners Among Young Japanese. Jpn. Psychol. Res. 2022, 64, 343–350. [Google Scholar] [CrossRef]
- He, W.; Dong, Y. Adaptive fuzzy neural network control for a constrained robot using impedance learning. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1174–1186. [Google Scholar] [CrossRef] [PubMed]
- Alam, A. Social robots in education for long-term human-robot interaction: Socially supportive behaviour of robotic tutor for creating robo-tangible learning environment in a guided discovery learning interaction. ECS Trans. 2022, 107, 12389. [Google Scholar] [CrossRef]
- Xu, Q.; Ge, S.S. Adaptive control of redundant robot manipulators with null-space compliance. Assem. Autom. 2018, 38, 615–624. [Google Scholar] [CrossRef]
- Bednarczyk, M.; Omran, H.; Bayle, B. Model predictive impedance control. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4702–4708. [Google Scholar]
- Lucci, N.; Lacevic, B.; Zanchettin, A.M.; Rocco, P. Combining speed and separation monitoring with power and force limiting for safe collaborative robotics applications. IEEE Robot. Autom. Lett. 2020, 5, 6121–6128. [Google Scholar] [CrossRef]
- Li, Y.; Tee, K.P.; Chan, W.L.; Yan, R.; Chua, Y.; Limbu, D.K. Continuous role adaptation for human–robot shared control. IEEE Trans. Robot. 2015, 31, 672–681. [Google Scholar] [CrossRef]
- Buerger, S.P.; Hogan, N. Complementary stability and loop shaping for improved human–robot interaction. IEEE Trans. Robot. 2007, 23, 232–244. [Google Scholar] [CrossRef]
- Fan, T.; Long, P.; Liu, W.; Pan, J. Distributed multi-robot collision avoidance via deep reinforcement learning for navigation in complex scenarios. Int. J. Robot. Res. 2020, 39, 856–892. [Google Scholar] [CrossRef]
- Peng, G.; Yang, C.; He, W.; Chen, C.P. Force sensorless admittance control with neural learning for robots with actuator saturation. IEEE Trans. Ind. Electron. 2019, 67, 3138–3148. [Google Scholar] [CrossRef]
- Hogan, N. Impedance Control: An Approach to Manipulation: Part II: Implementation; ASME: New York, NY, USA, 1985. [Google Scholar]
- Kazerooni, H.; Bausch, J.; Kramer, B. Automated deburring by robot manipulators. In Proceedings of the 1986 American Control Conference, Seattle, WA, USA, 18–20 June 1986; pp. 1749–1755. [Google Scholar]
- Abu-Dakka, F.J.; Saveriano, M. Variable impedance control and learning: A review. Front. Robot. AI 2020, 7, 590681. [Google Scholar] [CrossRef] [PubMed]
- Ajani, O.S.; Assal, S.F. Development of an autonomous robotic system for beard shaving assistance of disabled people based on an adaptive force tracking impedance control. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 5758–5775. [Google Scholar] [CrossRef]
- Wei, J.; Yi, D.; Bo, X.; Guangyu, C.; Dean, Z. Adaptive variable parameter impedance control for apple harvesting robot compliant picking. Complexity 2020, 2020, 4812657. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, T. Force control approaches research for robotic machining based on particle swarm optimization and adaptive iteration algorithms. Ind. Robot. Int. J. 2018, 45, 141–151. [Google Scholar] [CrossRef]
- Wakita, K.; Huang, J.; Di, P.; Sekiyama, K.; Fukuda, T. Human-walking-intention-based motion control of an omnidirectional-type cane robot. IEEE/ASME Trans. Mech. 2011, 18, 285–296. [Google Scholar] [CrossRef]
- Zhou, H.; Ma, S.; Wang, G.; Deng, Y.; Liu, Z. A hybrid control strategy for grinding and polishing robot based on adaptive impedance control. Adv. Mech. Eng. 2021, 13, 16878140211004034. [Google Scholar] [CrossRef]
- Thunyajarern, S.; Seeboonruang, U.; Kaitwanidvilai, S. PSO based adaptive force controller for 6DOF robot manipulators. In Proceedings of the World Congress on Engineering and Computer Sciences, San Francisco, CA, USA, 25–27 October 2017; Volume 2, pp. 691–695. [Google Scholar]
- Zhou, Y.; Li, Z.; He, S.; Cui, J.; Zhu, M. Adaptive Force Tracking Control of Manipulator in Uncalibrated Varied Environment Based on Variable Impedance Control. In Proceedings of the 2022 International Conference on Service Robotics (ICoSR), Philadelphia, PA, USA, 23–27 May 2022; pp. 218–223. [Google Scholar]
- Cao, H.; He, Y.; Chen, X.; Zhao, X. Smooth adaptive hybrid impedance control for robotic contact force tracking in dynamic environments. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 231–242. [Google Scholar] [CrossRef]
- Li, G.; Xie, H.; Wang, X.; Chen, Z. Research on optimization of human-machine interaction control strategy for exoskeleton based on impedance control. J. Mech. Sci. Technol. 2023, 37, 1411–1420. [Google Scholar] [CrossRef]
- Zhao, T.; Sun, G.; Yao, W. A New Impedance Control Method for End Effector Manipulator of Autonomous Unmanned System. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 2380–2385. [Google Scholar]
- Ott, C. Cartesian Impedance Control of Redundant and Flexible-Joint Robots; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Duan, J.; Gan, Y.; Chen, M.; Dai, X. Adaptive variable impedance control for dynamic contact force tracking in uncertain environment. Robot. Auton. Syst. 2018, 102, 54–65. [Google Scholar] [CrossRef]
- Guo, Y.; Peng, J.; Ding, S.; Liang, J.; Wang, Y. Fuzzy-based variable impedance control of uncertain robot manipulator in flexible environment: A nonlinear force contact model-based approach. Europe PMC, 2022; preprint. [Google Scholar]
- Viera-Martin, E.; Gómez-Aguilar, J.; Solís-Pérez, J.; Hernández-Pérez, J.; Escobar-Jiménez, R. Artificial neural networks: A practical review of applications involving fractional calculus. Eur. Phys. J. Spec. Top. 2022, 231, 2059–2095. [Google Scholar] [CrossRef] [PubMed]
- Arora, S.; Mathur, T.; Agarwal, S.; Tiwari, K.; Gupta, P. Applications of fractional calculus in computer vision: A survey. Neurocomputing 2022, 489, 407–428. [Google Scholar] [CrossRef]
- Conejero, J.A.; Franceschi, J.; Picó-Marco, E. Fractional vs. ordinary control systems: What does the fractional derivative provide? Mathematics 2022, 10, 2719. [Google Scholar] [CrossRef]
- Liu, L.; Xue, D.; Zhang, S. General type industrial temperature system control based on fuzzy fractional-order PID controller. Complex Intell. Syst. 2023, 9, 2585–2597. [Google Scholar] [CrossRef]
- Pradhan, R.; Majhi, S.K.; Pradhan, J.K.; Pati, B.B. Optimal fractional order PID controller design using Ant Lion Optimizer. Ain Shams Eng. J. 2020, 11, 281–291. [Google Scholar] [CrossRef]
- Li, P.; Gao, R.; Xu, C.; Li, Y.; Akgül, A.; Baleanu, D. Dynamics exploration for a fractional-order delayed zooplankton–phytoplankton system. Chaos Solitons Fractals 2023, 166, 112975. [Google Scholar] [CrossRef]
- Shen, Y.; Hua, J.; Fan, W.; Liu, Y.; Yang, X.; Chen, L. Optimal design and dynamic performance analysis of a fractional-order electrical network-based vehicle mechatronic ISD suspension. Mech. Syst. Signal Process. 2023, 184, 109718. [Google Scholar] [CrossRef]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2000, 47, 25–39. [Google Scholar] [CrossRef]
- Petras, I. Stability of fractional-order systems with rational orders. arXiv 2008, arXiv:0811.4102. [Google Scholar]
- Li, K.; He, Y.; Li, K.; Liu, C. Adaptive fractional-order admittance control for force tracking in highly dynamic unknown environments. Ind. Robot. Int. J. Robot. Res. Appl. 2023, 50, 530–541. [Google Scholar] [CrossRef]
- Hu, R.; Wang, T.; Jing, Y.; Xu, T.; Chen, F. Modeling and Active Vibration Control of Intelligent Flexible Manipulator Based on Deep Learning. In Proceedings of the 2022 International Conference on Artificial Intelligence and Autonomous Robot Systems (AIARS), Bristol, UK, 29–31 July 2022; pp. 276–280. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mutation Time [s] | 0–4 | 4–8 | 8–12 |
|---|---|---|---|
| Environmental stiffness [N/m] | 4000 | 6000 | 8000 |
| Environmental location [m] | 0.3 | 0.305 | 0.315 |
| Desire force [N] | 50 | 100 | 80 |
| Control Mode | AIC | VIC | FOAIC |
|---|---|---|---|
| MAE | 0.0891 | 0.0994 | 0.0742 |
| RMSE | 0.0963 | 0.1094 | 0.0812 |
| MSE | 0.0093 | 0.0120 | 0.0066 |
| Control Mode | AIC | VIC | FOAIC |
|---|---|---|---|
| MAE | 0.2527 | 0.3041 | 0.1963 |
| RMSE | 0.2848 | 0.3421 | 0.2201 |
| MSE | 0.0811 | 0.1170 | 0.0484 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, L.; Huang, Q. Adaptive Impedance Control for Force Tracking in Manipulators Based on Fractional-Order PID. Appl. Sci. 2023, 13, 10267. https://doi.org/10.3390/app131810267
Gu L, Huang Q. Adaptive Impedance Control for Force Tracking in Manipulators Based on Fractional-Order PID. Applied Sciences. 2023; 13(18):10267. https://doi.org/10.3390/app131810267
Chicago/Turabian StyleGu, Longhao, and Qingjiu Huang. 2023. "Adaptive Impedance Control for Force Tracking in Manipulators Based on Fractional-Order PID" Applied Sciences 13, no. 18: 10267. https://doi.org/10.3390/app131810267