


Multi-Objective Optimization of Square Corrugation Multilayer Nested Structures

Abstract
:1. Introduction
2. The Nested Structure with a Double Octagonal Inner Wall
2.1. The Geometric Parameter of the SCOD Tube
2.2. The Establish of the FE Model
2.3. The Verification of the FE Model
2.3.1. The Experiment Test Based on SC
2.3.2. The Mathematical Model Based on SCOD
- A.
- The prediction of Eb.
- B.
- The prediction of Em.
- C.
- The prediction of MCF.
2.4. The Sensitivity Analysis of SCOD
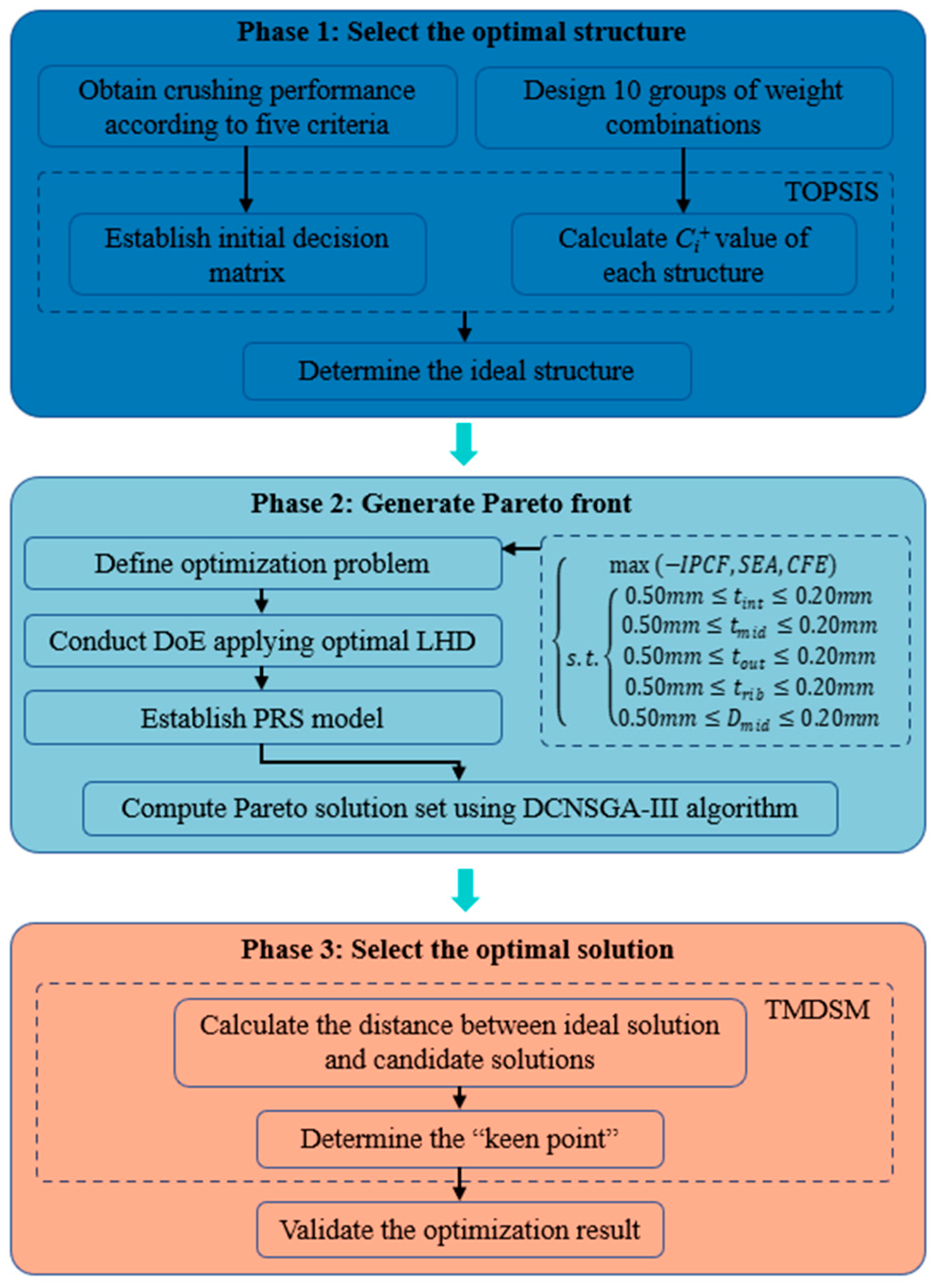
3. The Methodology of Multi-Objective Optimization
3.1. The Surrogate Model
3.1.1. Design of Experiments (DoE)
3.1.2. The Establish of Surrogate Model
3.2. The DCNSGA-III Algorithm
- A.
- Generate CMaOP framework.
| Algorithm 1: The DCNSGA-III to solve the framework of CMaOP | |
| 1 | Search incipient population P0; |
| 2 | Form the incipient relaxed constrained margin δ = δ(0), and make the iteration state t = 0; |
| 3 | while the termination requirement is not satisfied do |
| 4 | Shrink the boundary: δ = δ(t + 1); |
| 5 | Renew population δ-feasibility, t = t + 1; |
| 6 | Obtain the offspring population Ot in terms of Algorithm 2; |
| 7 | Renew the parent population Pt+1 in terms of Algorithm 3; |
| 8 | end |
| 9 | return non-dominated solutions. |
- B.
- Select mating parents.

- C.
- Update the parent population

- D.
- Non-dominated ranking based on reference point method.
- E.
- Evaluate computational complicacy.

3.3. The Minimum Distance Selection Method (TMDSM)
3.4. The Framework of the Optimization Process
4. The Optimization Results of SCOD
4.1. The Determination of the Optimization Problem
4.2. The Design of the Experiment (DoE)
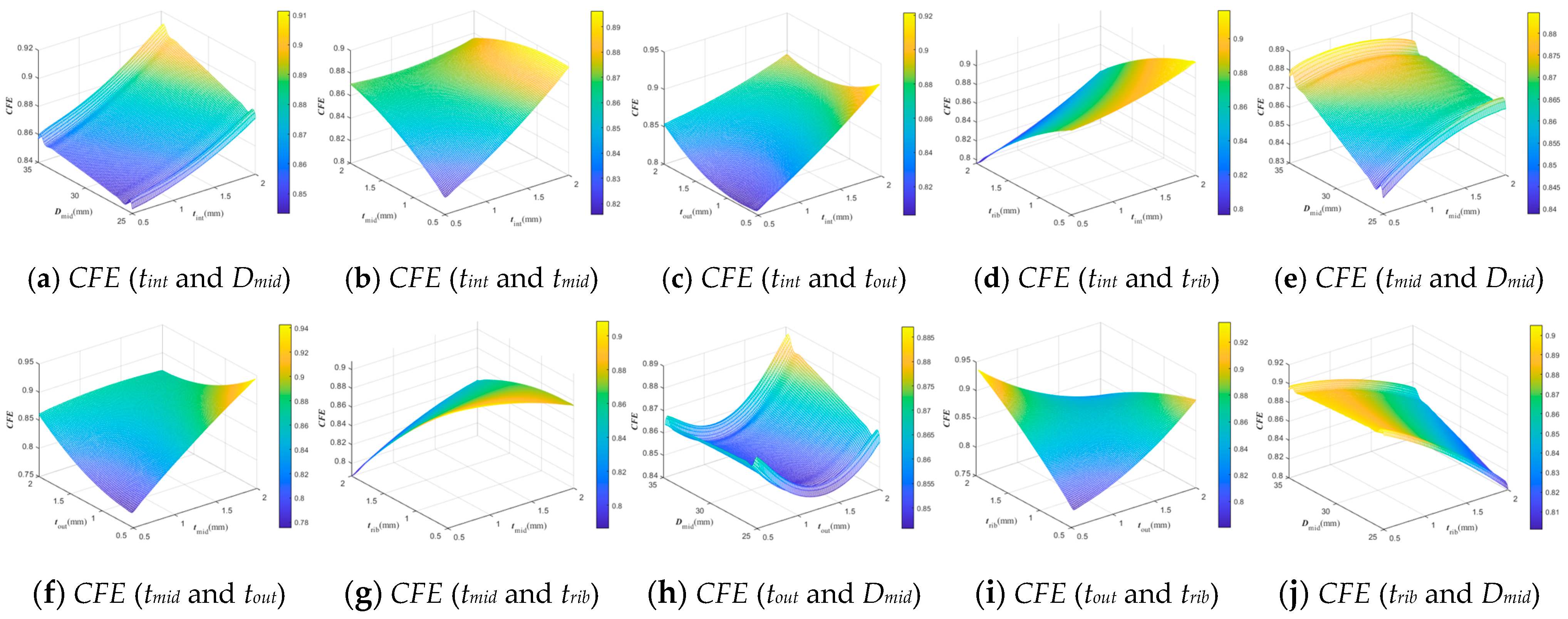
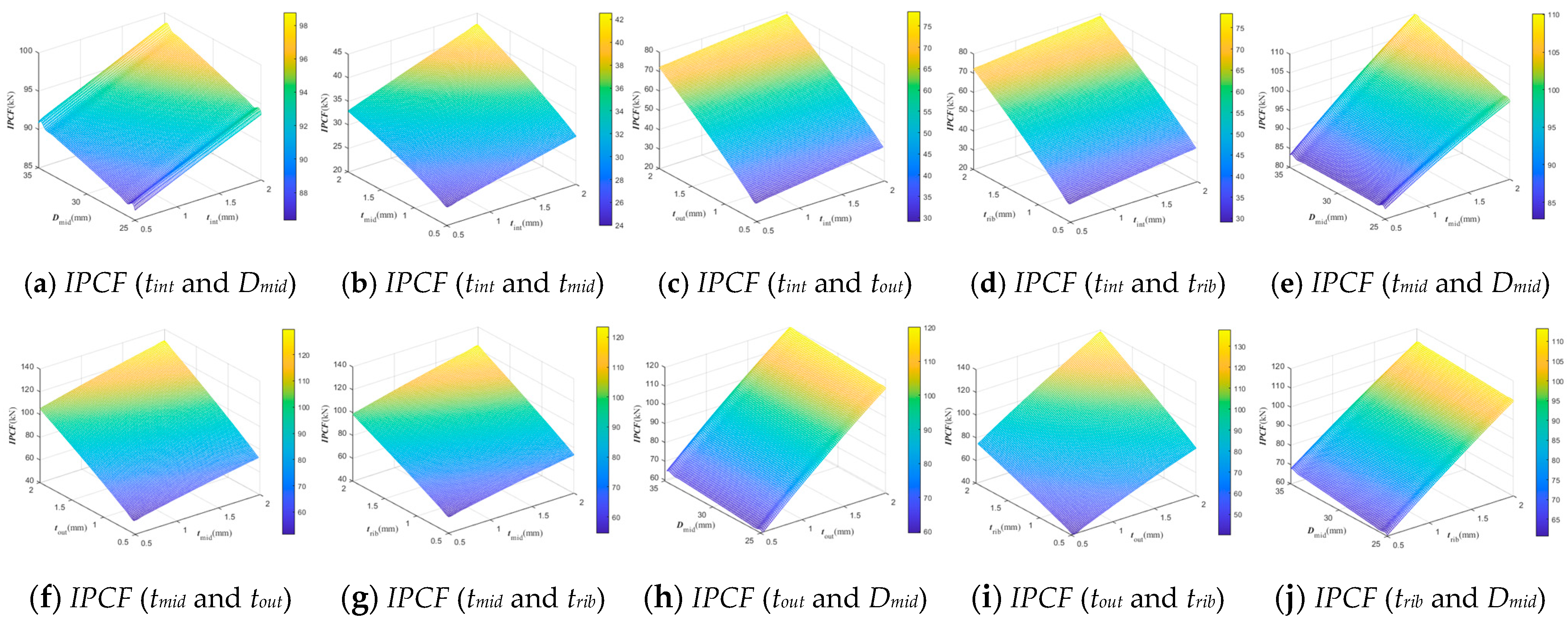
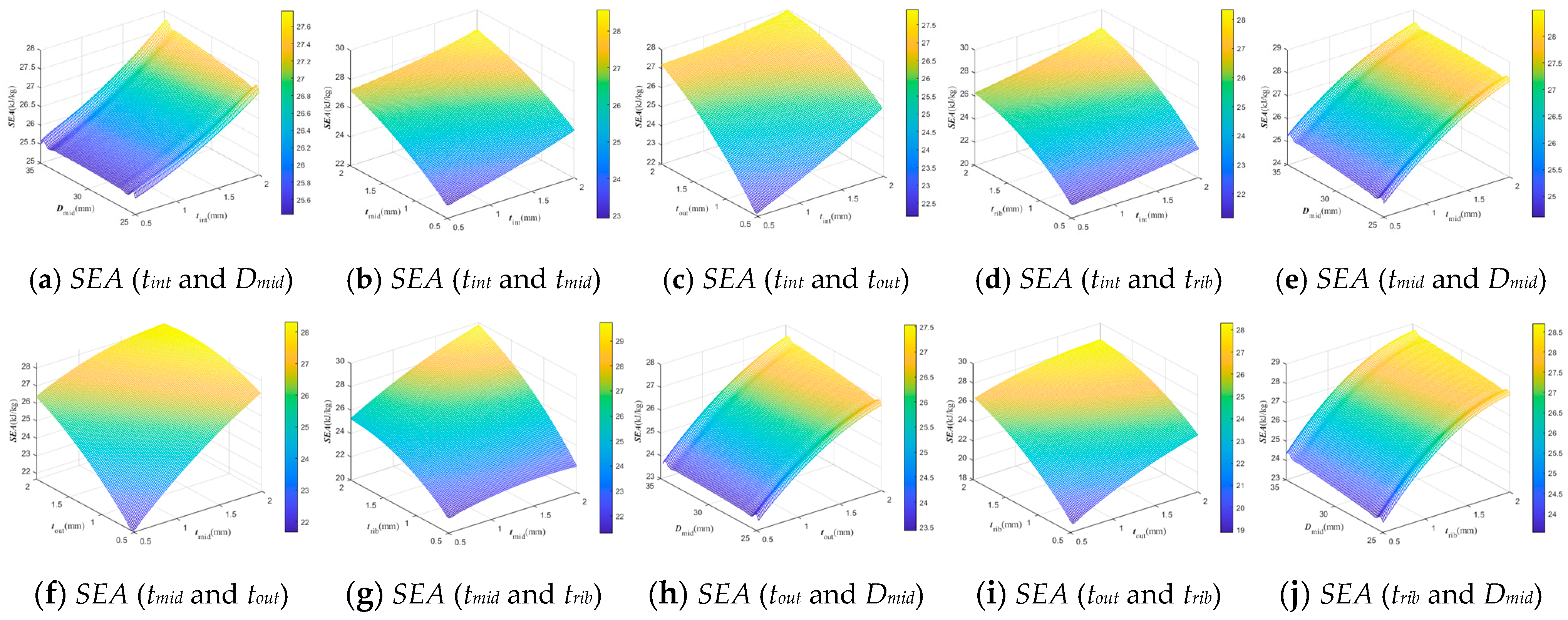
4.3. The Construction of the Surrogate Model
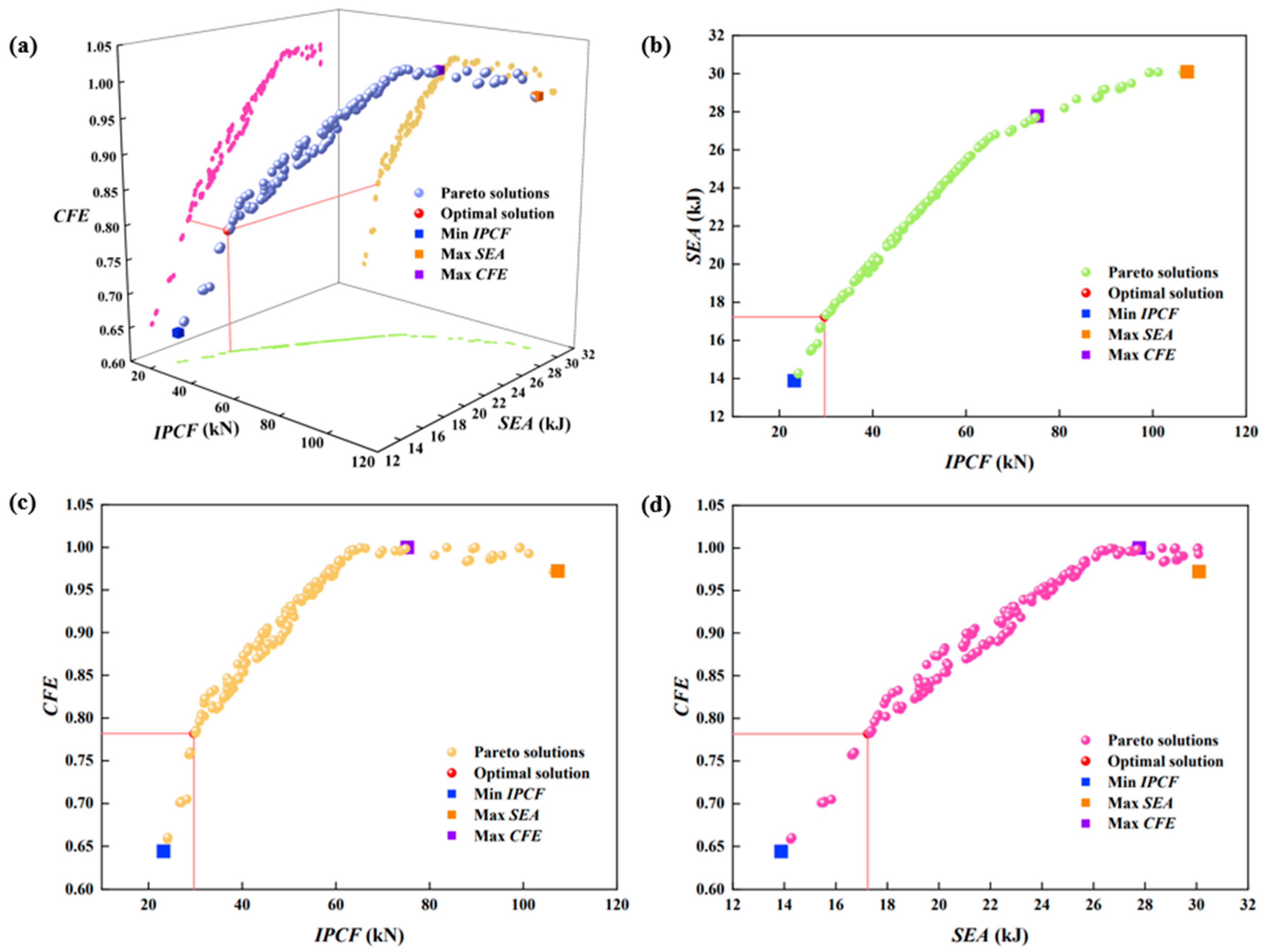
4.4. The Pareto Solution of Multi-Objective Optimization
5. Discussion
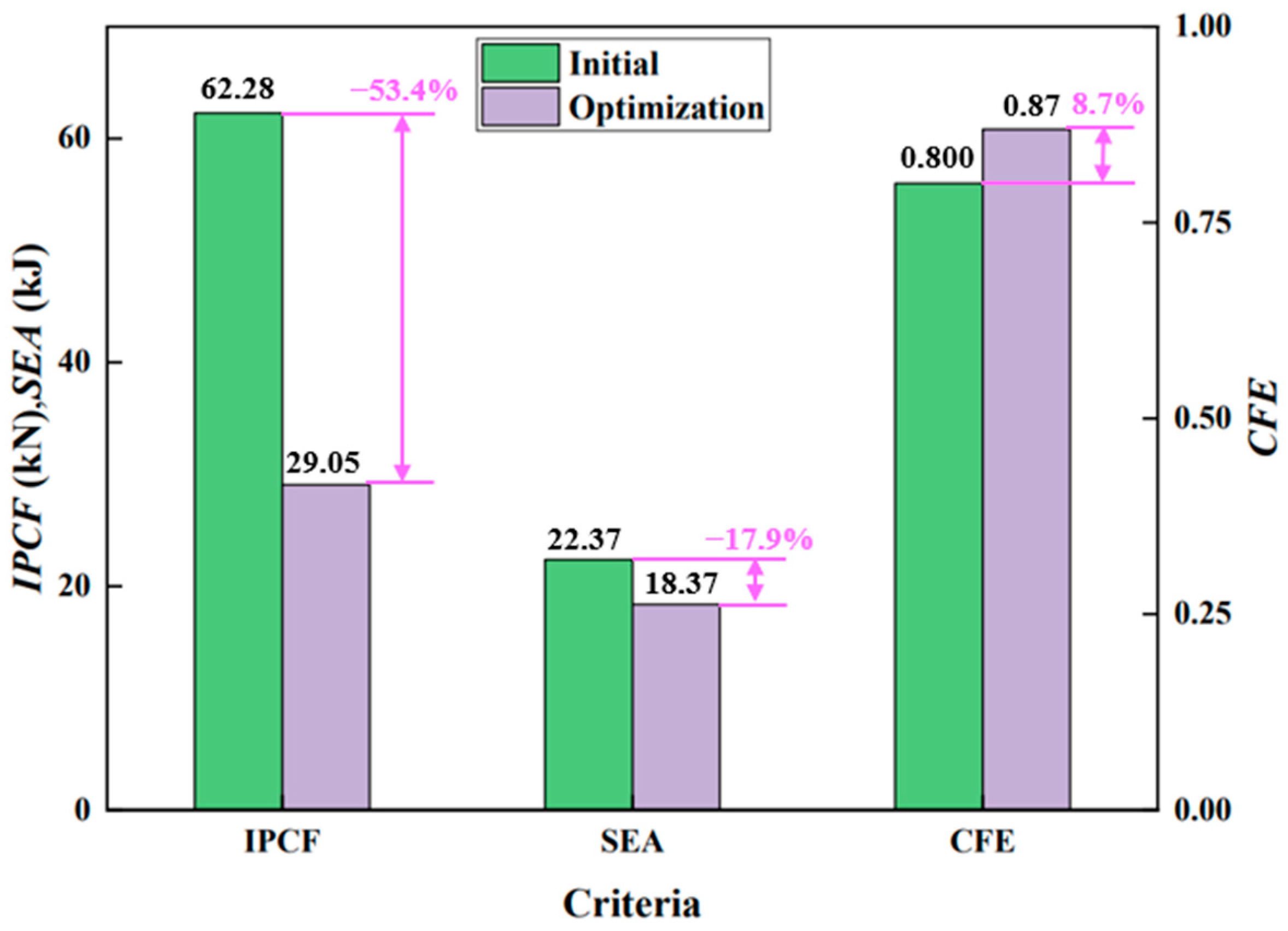
5.1. The Validation of Optimization Results
5.2. The Discussion of Optimization Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | tint | tmid | tout | trib | Dmid | IPCF (kN) | SEA (kJ) | CFE |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.653 | 0.881 | 0.653 | 1.593 | 27.88 | 58.5868454 | 21.19321804 | 0.782614165 |
| 2 | 1.593 | 1.822 | 1.492 | 1.466 | 25.68 | 85.91944122 | 16.15610743 | 0.628983506 |
| 3 | 1.619 | 0.907 | 0.525 | 0.983 | 29.75 | 46.28269959 | 21.70109438 | 0.866691667 |
| 4 | 1.034 | 1.924 | 0.78 | 1.212 | 26.19 | 67.09941864 | 24.20304434 | 0.88419663 |
| 5 | 1.314 | 1.517 | 1.085 | 1.059 | 35 | 77.66350555 | 24.48207631 | 0.85696551 |
| 6 | 0.551 | 0.754 | 1.568 | 1.085 | 28.22 | 77.89289093 | 23.87391076 | 0.79700563 |
| 7 | 0.78 | 0.831 | 1.39 | 1.415 | 34.83 | 84.99373627 | 24.65070090 | 0.81567804 |
| 8 | 1.542 | 0.983 | 1.72 | 1.237 | 34.66 | 97.21710205 | 26.84166619 | 0.88668316 |
| 9 | 1.517 | 1.059 | 0.5 | 1.847 | 30.08 | 65.23165894 | 23.06232295 | 0.87299951 |
| 10 | 1.186 | 1.161 | 1.237 | 1.314 | 30.25 | 82.10932922 | 24.60627686 | 0.82806999 |
| 11 | 1.085 | 1.288 | 1.364 | 0.958 | 25.17 | 72.99485016 | 24.13321877 | 0.85316121 |
| 12 | 1.492 | 1.237 | 1.288 | 2 | 27.71 | 106.20410156 | 27.67901446 | 0.86784737 |
| 13 | 1.644 | 0.5 | 1.314 | 1.034 | 30.93 | 70.09825897 | 23.51739861 | 0.82531042 |
| 14 | 0.881 | 1.085 | 0.602 | 1.568 | 33.81 | 62.30578232 | 22.54512732 | 0.83663219 |
| 15 | 1.161 | 1.212 | 1.746 | 1.975 | 33.14 | 122.19077301 | 28.60797149 | 0.87888028 |
| 16 | 1.695 | 1.619 | 0.831 | 0.754 | 26.36 | 56.82844925 | 21.63289296 | 0.83891925 |
| 17 | 1.797 | 0.551 | 0.932 | 1.695 | 27.54 | 74.16440582 | 23.61493297 | 0.82344431 |
| 18 | 1.008 | 0.602 | 0.881 | 0.831 | 27.03 | 47.46133041 | 19.72502649 | 0.75072193 |
| 19 | 1.136 | 0.576 | 1.873 | 1.542 | 30.42 | 102.79691315 | 25.71772349 | 0.81509915 |
| 20 | 1.237 | 0.678 | 0.805 | 0.805 | 34.32 | 48.95460510 | 20.17285200 | 0.76640964 |
| 21 | 1.11 | 0.525 | 1.008 | 1.822 | 31.27 | 76.22654724 | 22.58756087 | 0.77859680 |
| 22 | 1.898 | 0.805 | 1.542 | 1.797 | 31.44 | 107.14806366 | 27.26390038 | 0.86083020 |
| 23 | 1.746 | 1.771 | 0.703 | 1.72 | 27.2 | 83.47353363 | 21.78154234 | 0.73973917 |
| 24 | 1.263 | 0.78 | 1.924 | 0.78 | 27.37 | 81.18247223 | 23.70013979 | 0.83406470 |
| 25 | 0.932 | 0.703 | 1.619 | 0.678 | 32.63 | 66.60689545 | 22.51851537 | 0.83245015 |
| 26 | 0.907 | 1.669 | 0.729 | 1.873 | 29.41 | 82.81291962 | 19.56630564 | 0.665503958 |
| 27 | 1.975 | 1.034 | 0.958 | 0.703 | 33.64 | 59.41541672 | 22.03356569 | 0.827748697 |
| 28 | 0.958 | 1.364 | 0.627 | 0.602 | 28.05 | 41.02738953 | 18.98192168 | 0.790898343 |
| 29 | 1.771 | 0.729 | 1.161 | 0.881 | 25.51 | 61.07393265 | 22.47664525 | 0.83919475 |
| 30 | 1.059 | 0.627 | 1.339 | 1.619 | 25.85 | 87.22098541 | 24.14410145 | 0.77064779 |
| 31 | 1.441 | 1.568 | 0.983 | 1.949 | 33.98 | 100.7751923 | 26.90492000 | 0.87137996 |
| 32 | 1.72 | 0.932 | 1.822 | 1.492 | 26.53 | 109.1475449 | 26.94120844 | 0.83619032 |
| 33 | 0.805 | 1.441 | 1.186 | 1.746 | 25 | 92.13642883 | 26.15691225 | 0.83742913 |
| 34 | 1.212 | 1.492 | 1.847 | 0.627 | 33.31 | 85.28304291 | 24.69711154 | 0.88691756 |
| 35 | 1.415 | 2 | 1.11 | 1.364 | 30.76 | 92.32149506 | 27.07020183 | 0.90570654 |
| 36 | 0.754 | 1.314 | 1.034 | 0.551 | 32.97 | 54.34207535 | 20.03192217 | 0.76660751 |
| 37 | 1.466 | 1.11 | 1.263 | 0.5 | 29.58 | 58.486763 | 21.18228986 | 0.81440263 |
| 38 | 1.847 | 1.415 | 1.695 | 0.729 | 26.02 | 81.47267914 | 24.87379190 | 0.89698179 |
| 39 | 0.831 | 1.797 | 0.576 | 1.11 | 32.12 | 58.70955277 | 22.89472230 | 0.87864541 |
| 40 | 0.602 | 1.644 | 1.212 | 1.669 | 33.47 | 98.02640533 | 26.07631989 | 0.83622852 |
| 41 | 0.576 | 1.008 | 1.415 | 1.924 | 29.92 | 102.7796021 | 26.28088244 | 0.80803277 |
| 42 | 1.364 | 1.136 | 0.678 | 1.39 | 25.34 | 62.23813248 | 23.41673627 | 0.84423196 |
| 43 | 2 | 1.263 | 1.136 | 1.288 | 28.9 | 82.09313965 | 26.34920334 | 0.90810149 |
| 44 | 0.703 | 1.39 | 1.669 | 0.525 | 28.73 | 70.21337891 | 22.83575216 | 0.84386887 |
| 45 | 1.339 | 1.949 | 1.466 | 0.653 | 28.39 | 77.56575012 | 23.67024308 | 0.86393435 |
| 46 | 0.525 | 0.653 | 0.856 | 1.008 | 31.61 | 51.09122849 | 19.44927919 | 0.71204341 |
| 47 | 0.627 | 1.339 | 1.898 | 1.263 | 31.95 | 105.0430908 | 26.82023108 | 0.85247459 |
| 48 | 1.822 | 1.593 | 0.551 | 1.339 | 32.8 | 67.79760742 | 18.23823219 | 0.67373307 |
| 49 | 0.729 | 1.975 | 1.441 | 0.932 | 32.29 | 85.90914917 | 24.88916179 | 0.86841285 |
| 50 | 1.669 | 0.856 | 0.907 | 1.517 | 34.49 | 73.7012558 | 24.30086932 | 0.862368361 |
| 51 | 1.949 | 0.958 | 1.949 | 0.856 | 30.59 | 91.10535431 | 24.17337595 | 0.842698407 |
| 52 | 1.924 | 1.72 | 1.517 | 0.907 | 32.46 | 91.38176727 | 25.66405737 | 0.890494034 |
| 53 | 1.39 | 1.542 | 2 | 1.186 | 29.24 | 110.4089966 | 25.86634032 | 0.833959711 |
| 54 | 1.568 | 1.746 | 0.754 | 0.576 | 31.78 | 54.2386322 | 20.53222844 | 0.818566565 |
| 55 | 0.5 | 1.466 | 1.059 | 1.136 | 28.56 | 69.34976959 | 23.34502902 | 0.819309729 |
| 56 | 1.288 | 1.873 | 1.797 | 1.441 | 34.15 | 120.6449738 | 27.35392593 | 0.859222077 |
| 57 | 0.983 | 1.847 | 1.593 | 1.898 | 29.07 | 121.1154556 | 28.52630889 | 0.87472431 |
| 58 | 0.856 | 1.186 | 1.975 | 1.644 | 26.69 | 117.101059 | 27.04864359 | 0.822575551 |
| 59 | 1.873 | 1.695 | 1.644 | 1.771 | 31.1 | 124.5606461 | 29.0063381 | 0.891892921 |
| 60 | 0.678 | 1.898 | 1.771 | 1.161 | 26.86 | 98.92190552 | 23.62567226 | 0.78182648 |
References
- Jensen, L.W.; Schmidt, M.; Nielsen, O.A. Determination of Infrastructure Capacity in Railway Networks without the Need for a Fixed Timetable. Transp. Res. Part C Emerg. Technol. 2020, 119, 102751. [Google Scholar] [CrossRef]
- Hou, L.; Peng, Y.; Sun, D. Hybrid Framework for Safety Design of Human–Rail Vehicle Transportation System Using Stochastic Approach and Optimization. IEEE Trans. Ind. Inform. 2023, 19, 6599–6612. [Google Scholar] [CrossRef]
- Zhang, H.; Peng, Y.; Hou, L.; Wang, D.; Tian, G.; Li, Z. Multistage Impact Energy Distribution for Whole Vehicles in High-Speed Train Collisions: Modeling and Solution Methodology. IEEE Trans. Ind. Inform. 2020, 16, 2486–2499. [Google Scholar] [CrossRef]
- De Melo, A.L.O.; Kaewunruen, S.; Papaelias, M. Hybrid Approach to Predict the Track Deterioration in a Railway In-Service: A Conceptual Design. IOP Conf. Ser. Mater. Sci. Eng. 2019, 603, 032083. [Google Scholar] [CrossRef]
- Li, D.; Kaewunruen, S.; You, R. Remaining Fatigue Life Predictions of Railway Prestressed Concrete Sleepers Considering Time-Dependent Surface Abrasion. Sustainability 2022, 14, 11237. [Google Scholar] [CrossRef]
- Ngamkhanong, C.; Kaewunruen, S. Prediction of Thermal-Induced Buckling Failures of Ballasted Railway Tracks Using Artificial Neural Network (ANN). Int. J. Struct. Stab. Dyn. 2022, 22, 2250049. [Google Scholar] [CrossRef]
- Dindar, S.; Kaewunruen, S.; An, M.; Gigante-Barrera, Á. Derailment-Based Fault Tree Analysis on Risk Management of Railway Turnout Systems. IOP Conf. Ser. Mater. Sci. Eng. 2017, 245, 042020. [Google Scholar] [CrossRef]
- Dindar, S.; Kaewunruen, S.; An, M. A Hierarchical Bayesian-Based Model for Hazard Analysis of Climate Effect on Failures of Railway Turnout Components. Reliab. Eng. Syst. Saf. 2022, 218, 108130. [Google Scholar] [CrossRef]
- Wang, J.; Liu, H.; Tang, T.; Luo, X.; Chai, M. A Space-Time Interval Based Protection Method for Virtual Coupling. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25 November 2022; IEEE: Manhattan, NY, USA, 2022; pp. 4906–4911. [Google Scholar]
- Li, S.; Cai, B.; Liu, J.; Wang, J. Collision Risk Analysis Based Train Collision Early Warning Strategy. Accid. Anal. Prev. 2018, 112, 94–104. [Google Scholar] [CrossRef]
- Yang, C.; Guo, W.; Xiao, X.; Xu, P.; Yao, S. Structural Design and Optimization of a Guardrail for the Train-to-Train Collision Test Platform. Mech. Based Des. Struct. Mach. 2023, 1–29. [Google Scholar] [CrossRef]
- Wei, W.; Zhang, F.; Xing, Y.; Wang, H.; Liu, R. The Offset Crashworthiness and Parameter Optimization of C-Shaped Frame for Rail Vehicle Anti-Climbing Device. Metals 2023, 13, 501. [Google Scholar] [CrossRef]
- Yadav, O.P.; Vyas, N.S. The Influence of AAR Coupler Features on Estimation of In-Train Forces. Railw. Eng. Sci. 2023, 31, 233–251. [Google Scholar] [CrossRef]
- Peng, Y.; Li, T.; Bao, C.; Zhang, J.; Xie, G.; Zhang, H. Performance Analysis and Multi-Objective Optimization of Bionic Dendritic Furcal Energy-Absorbing Structures for Trains. Int. J. Mech. Sci. 2023, 246, 108145. [Google Scholar] [CrossRef]
- Peng, Y.; Li, T.; Hou, L.; Wang, K.; Xie, G.; Zhang, H. Bio-Inspired Cellular Thin-Walled Structures under Impact Loading: Modeling and Multi-Stage Cooperative Optimization Algorithm. Mech. Adv. Mater. Struct. 2023, 1–18. [Google Scholar] [CrossRef]
- Lin, Y.; Min, J.; Li, Y.; Lin, J. A Thin-Walled Structure with Tailored Properties for Axial Crushing. Int. J. Mech. Sci. 2019, 157–158, 119–135. [Google Scholar] [CrossRef]
- Alghamdi, A.A.A. Collapsible Impact Energy Absorbers: An Overview. Thin-Walled Struct. 2001, 39, 189–213. [Google Scholar] [CrossRef]
- Sun, G.; Deng, M.; Zheng, G.; Li, Q. Design for Cost Performance of Crashworthy Structures Made of High Strength Steel. Thin-Walled Struct. 2019, 138, 458–472. [Google Scholar] [CrossRef]
- Singace, A.A.; El-Sobky, H. Behaviour of Axially Crushed Corrugated Tubes. Int. J. Mech. Sci. 1997, 39, 249–268. [Google Scholar] [CrossRef]
- Liu, Z.; Hao, W.; Xie, J.; Lu, J.; Huang, R.; Wang, Z. Axial-Impact Buckling Modes and Energy Absorption Properties of Thin-Walled Corrugated Tubes with Sinusoidal Patterns. Thin-Walled Struct. 2015, 94, 410–423. [Google Scholar] [CrossRef]
- Wu, S.; Li, G.; Sun, G.; Wu, X.; Li, Q. Crashworthiness Analysis and Optimization of Sinusoidal Corrugation Tube. Thin-Walled Struct. 2016, 105, 121–134. [Google Scholar] [CrossRef]
- Li, Z.; Yao, S.; Ma, W.; Xu, P.; Che, Q. Energy-Absorption Characteristics of a Circumferentially Corrugated Square Tube with a Cosine Profile. Thin-Walled Struct. 2019, 135, 385–399. [Google Scholar] [CrossRef]
- Hu, J.; Xu, P.; Fan, Z.; Li, Y.; Tan, X. Axial Compression Response of Multi-Cell Tube Reinforced by Parallel Leaf Veins Inspired Secondary Ribs. Thin-Walled Struct. 2023, 185, 110557. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, H. Axial Crushing of Circular Multi-Cell Columns. Int. J. Impact Eng. 2014, 65, 110–125. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, M.; Pei, W.; Yu, F.; Jiang, Y. Energy-Absorbing Mechanism and Crashworthiness Performance of Thin-Walled Tubes Diagonally Filled with Rib-Reinforced Foam Blocks under Axial Crushing. Compos. Struct. 2022, 299, 116149. [Google Scholar] [CrossRef]
- Liang, H.; Hao, W.; Sun, H.; Pu, Y.; Zhao, Y.; Ma, F. On Design of Novel Bionic Bamboo Tubes for Multiple Compression Load Cases. Int. J. Mech. Sci. 2022, 218, 107067. [Google Scholar] [CrossRef]
- Shi, Y.-Q.; Qin, R.-X.; Chen, B.-Z. Crashworthiness Design and Analysis for Novel Multi-Corner Square Columns under Axial Loading. Mech. Adv. Mater. Struct. 2022, 29, 5843–5859. [Google Scholar] [CrossRef]
- Ma, W.; Xie, S.; Li, Z.; Feng, Z.; Jing, K. Crushing Behaviors of Horse-Hoof-Wall Inspired Corrugated Tubes under Multiple Loading Conditions. Mech. Adv. Mater. Struct. 2022, 29, 3263–3280. [Google Scholar] [CrossRef]
- Deng, X.; Liu, W. Experimental and Numerical Investigation of a Novel Sandwich Sinusoidal Lateral Corrugated Tubular Structure under Axial Compression. Int. J. Mech. Sci. 2019, 151, 274–287. [Google Scholar] [CrossRef]
- Deng, X.; Liu, W. Multi-Objective Optimization of Thin-Walled Sandwich Tubes with Lateral Corrugated Tubes in the Middle for Energy Absorption. Thin-Walled Struct. 2019, 137, 303–317. [Google Scholar] [CrossRef]
- Zhu, H.; Yao, S.; Li, Z.; Liu, J.; Xu, P.; Liu, M. Crashworthiness Analysis of Multilayered Hexagonal Tubes under Axial and Oblique Loads. Mech. Adv. Mater. Struct. 2023, 30, 3608–3629. [Google Scholar] [CrossRef]
- Tran, T.; Le, D.; Baroutaji, A. Theoretical and Numerical Crush Analysis of Multi-Stage Nested Aluminium Alloy Tubular Structures under Axial Impact Loading. Eng. Struct. 2019, 182, 39–50. [Google Scholar] [CrossRef]
- Yang, M.; Han, B.; Su, P.; Zhang, Q.; Zhang, Q.; Zhao, Z.; Ni, C.; Lu, T.J. Crashworthiness of Hierarchical Truncated Conical Shells with Corrugated Cores. Int. J. Mech. Sci. 2021, 193, 106171. [Google Scholar] [CrossRef]
- Xie, G.; Wang, K.; Wu, X.; Wang, J.; Li, T.; Peng, Y.; Zhang, H. A Hybrid Multi-Stage Decision-Making Method with Probabilistic Interval-Valued Hesitant Fuzzy Set for 3D Printed Composite Material Selection. Eng. Appl. Artif. Intell. 2023, 123, 106483. [Google Scholar] [CrossRef]
- Albak, E.İ. Crashworthiness Design and Optimization of Nested Structures with a Circumferentially Corrugated Circular Outer Wall and Inner Ribs. Thin-Walled Struct. 2021, 167, 108219. [Google Scholar] [CrossRef]
- Qiu, N.; Gao, Y.; Fang, J.; Sun, G.; Li, Q.; Kim, N.H. Crashworthiness Optimization with Uncertainty from Surrogate Model and Numerical Error. Thin-Walled Struct. 2018, 129, 457–472. [Google Scholar] [CrossRef]
- Pirmohammad, S.; Esmaeili Marzdashti, S. Crashworthiness Optimization of Combined Straight-Tapered Tubes Using Genetic Algorithm and Neural Networks. Thin-Walled Struct. 2018, 127, 318–332. [Google Scholar] [CrossRef]
- Jiao, R.; Zeng, S.; Li, C.; Yang, S.; Ong, Y.-S. Handling Constrained Many-Objective Optimization Problems via Problem Transformation. IEEE Trans. Cybern. 2021, 51, 4834–4847. [Google Scholar] [CrossRef]
- Li, Z.; Ma, W.; Xu, P.; Yao, S. Crushing Behavior of Circumferentially Corrugated Square Tube with Different Cross Inner Ribs. Thin-Walled Struct. 2019, 144, 106370. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, X.; Wang, J.; Chen, T.; Wang, C.H. Crushing Analysis for Novel Bio-Inspired Hierarchical Circular Structures Subjected to Axial Load. Int. J. Mech. Sci. 2018, 140, 407–431. [Google Scholar] [CrossRef]
- Reddy, T.J.; Narayanamurthy, V.; Rao, Y.V.D. Evolution of a New Geometric Profile for an Ideal Tube Inversion for Crash Energy Absorption. Int. J. Mech. Sci. 2019, 155, 125–142. [Google Scholar] [CrossRef]
- Tran, T.; Hou, S.; Han, X.; Nguyen, N.; Chau, M. Theoretical Prediction and Crashworthiness Optimization of Multi-Cell Square Tubes under Oblique Impact Loading. Int. J. Mech. Sci. 2014, 89, 177–193. [Google Scholar] [CrossRef]
- Tran, T.; Hou, S.; Han, X.; Tan, W.; Nguyen, N. Theoretical Prediction and Crashworthiness Optimization of Multi-Cell Triangular Tubes. Thin-Walled Struct. 2014, 82, 183–195. [Google Scholar] [CrossRef]
- Yan, J.; Yao, S.; Xu, P.; Peng, Y.; Shao, H.; Zhao, S. Theoretical Prediction and Numerical Studies of Expanding Circular Tubes as Energy Absorbers. Int. J. Mech. Sci. 2016, 105, 206–214. [Google Scholar] [CrossRef]
- Li, Z.; Ma, W.; Hou, L.; Xu, P.; Yao, S. Crashworthiness Analysis of Corrugations Reinforced Multi-Cell Square Tubes. Thin-Walled Struct. 2020, 150, 106708. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, Y.; Lin, J.; Lu, Y. Theoretical Analysis and Crashworthiness Optimization of Hybrid Multi-Cell Structures. Thin-Walled Struct. 2019, 142, 116–131. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, H. Numerical and Theoretical Studies on Energy Absorption of Three-Panel Angle Elements. Int. J. Impact Eng. 2012, 46, 23–40. [Google Scholar] [CrossRef]
- Albak, E.İ. Crashworthiness Design for Multi-Cell Circumferentially Corrugated Thin-Walled Tubes with Sub-Sections under Multiple Loading Conditions. Thin-Walled Struct. 2021, 164, 107886. [Google Scholar] [CrossRef]
- Srinivasan, A.; Turner, C.J.; Kelkar, A.; Castanier, M.P.; Rizzo, D. Selection of Surrogate Models with Metafeatures; SAE Technical Paper 2022-01-0365; SAE: Warrendale, PA, USA, 2022. [Google Scholar]
- Pang, Y.; Wang, Y.; Sun, W.; Song, X. OTL-PEM: An Optimization-Based Two-Layer Pointwise Ensemble of Surrogate Models. J. Mech. Des. 2022, 144, 051702. [Google Scholar] [CrossRef]
- Deng, X.; Liu, W.; Jin, L. On the Crashworthiness Analysis and Design of a Lateral Corrugated Tube with a Sinusoidal Cross-Section. Int. J. Mech. Sci. 2018, 141, 330–340. [Google Scholar] [CrossRef]
- Deng, X.; Qin, S.; Huang, J. Energy Absorption Characteristics of Axially Varying Thickness Lateral Corrugated Tubes under Axial Impact Loading. Thin-Walled Struct. 2021, 163, 107721. [Google Scholar] [CrossRef]
- Koehler, J.R.; Owen, A.B. 9 Computer experiments. Handb. Stat. 1996, 13, 261–308. [Google Scholar] [CrossRef]
- Jourdan, A.; Franco, J. Optimal Latin Hypercube Designs for the Kullback–Leibler Criterion. AStA Adv. Stat. Anal. 2010, 94, 341–351. [Google Scholar] [CrossRef]
- Peng, Y.; Zhou, J.; Hou, L.; Wang, K.; Chen, C.; Zhang, H. A Hybrid MCDM-Based Optimization Method for Cutting-Type Energy-Absorbing Structures of Subway Vehicles. Struct. Multidiscip. Optim. 2022, 65, 228. [Google Scholar] [CrossRef]
- Aye, C.M.; Pholdee, N.; Yildiz, A.R.; Bureerat, S.; Sait, S.M. Multi-Surrogate-Assisted Metaheuristics for Crashworthiness Optimisation. Int. J. Veh. Des. 2019, 80, 223. [Google Scholar] [CrossRef]
- Altin, M.; Acar, E.; Güler, M. Crashworthiness Optimization of Hierarchical Hexagonal Honeycombs under Out-of-Plane Impact. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 963–974. [Google Scholar] [CrossRef]
- Hou, S.; Li, Q.; Long, S.; Yang, X.; Li, W. Multiobjective Optimization of Multi-Cell Sections for the Crashworthiness Design. Int. J. Impact Eng. 2008, 35, 1355–1367. [Google Scholar] [CrossRef]
- Zhu, Q.; Lin, Q.; Li, J.; Coello Coello, C.A.; Ming, Z.; Chen, J.; Zhang, J. An Elite Gene Guided Reproduction Operator for Many-Objective Optimization. IEEE Trans. Cybern. 2021, 51, 765–778. [Google Scholar] [CrossRef]
- Duan, S.; Tao, Y.; Han, X.; Yang, X.; Hou, S.; Hu, Z. Investigation on Structure Optimization of Crashworthiness of Fiber Reinforced Polymers Materials. Compos. Part B Eng. 2014, 60, 471–478. [Google Scholar] [CrossRef]
- Sun, G.; Li, G.; Zhou, S.; Li, H.; Hou, S.; Li, Q. Crashworthiness Design of Vehicle by Using Multiobjective Robust Optimization. Struct. Multidiscip. Optim. 2011, 44, 99–110. [Google Scholar] [CrossRef]
- Chen, Y.; Bai, Z.; Zhang, L.; Wang, Y.; Sun, G.; Cao, L. Crashworthiness Analysis of Octagonal Multi-Cell Tube with Functionally Graded Thickness under Multiple Loading Angles. Thin-Walled Struct. 2017, 110, 133–139. [Google Scholar] [CrossRef]
- Hussein, R.D.; Ruan, D.; Lu, G.; Guillow, S.; Yoon, J.W. Crushing Response of Square Aluminium Tubes Filled with Polyurethane Foam and Aluminium Honeycomb. Thin-Walled Struct. 2017, 110, 140–154. [Google Scholar] [CrossRef]
- Li, G.; Yang, J.; Wu, Z.; Zhang, W.; Okolo, P.; Zhang, D. A Sequential Optimal Latin Hypercube Design Method Using an Efficient Recursive Permutation Evolution Algorithm. Eng. Optim. 2022, 1–20. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, H.; Wang, D.; Yu, H.; Wang, L.; Yu, D.; Peng, Y. Preference-Based Multi-Attribute Decision-Making Method with Spherical-Z Fuzzy Sets for Green Product Design. Eng. Appl. Artif. Intell. 2023, 126, 106767. [Google Scholar] [CrossRef]












| Properties | Values |
|---|---|
| Density | ρ = 2700 kg/m3 |
| Young’s modulus | E = 69.79 GPa |
| Yield stress | σy = 54 MPa |
| Ultimate stress | σu = 163.46 MPa |
| Poisson’s ratio | υ = 0.33 |
| Tube | IPCF (kN) | MCF (kN) | EA (kJ) | SEA (kJ/kg) | |
|---|---|---|---|---|---|
| SC | Test | 18.34 | 5.70 | 0.34 | 6.14 |
| FE | 17.95 | 5.60 | 0.34 | 6.08 | |
| Error | 2.17% | 1.78% | 1.19% | 0.98% |
| Name | Method | MCF Value (kN) | Error |
|---|---|---|---|
| SCOD | FE | 50.00 | 2.24% |
| TH | 51.12 |
| Target | MAX | MRE | RMSE | R2 |
|---|---|---|---|---|
| IPCF | 0.03326 | 0.016487 | 0.01947 | 0.99579 |
| SEA | 0.16793 | 0.07733 | 0.08729 | 0.91303 |
| CFE | 0.17481 | 0.08694 | 0.10208 | 0.88035 |
| Tolerance | 0.3 | 0.2 | 0.2 | 0.88 |
| tint (mm) | tmid (mm) | tout (mm) | trib (mm) | Dmid (mm) | IPCF (kN) | SEA (kJ) | CFE | |
|---|---|---|---|---|---|---|---|---|
| Optimal solution | 1.990 | 0.523 | 0.500 | 0.500 | 25.000 | 29.678 | 17.238 | 0.781 |
| FE values | 29.050 | 18.371 | 0.869 | |||||
| Error | — | — | — | — | — | 2.12% | 6.57% | 11.20% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Yu, D.; Li, T.; Wang, L.; Huang, Z.; Zhang, Y. Multi-Objective Optimization of Square Corrugation Multilayer Nested Structures. Appl. Sci. 2023, 13, 9750. https://doi.org/10.3390/app13179750
Zhang H, Yu D, Li T, Wang L, Huang Z, Zhang Y. Multi-Objective Optimization of Square Corrugation Multilayer Nested Structures. Applied Sciences. 2023; 13(17):9750. https://doi.org/10.3390/app13179750
Chicago/Turabian StyleZhang, Honghao, Dongtao Yu, Tao Li, Lingyu Wang, Zhongwei Huang, and Yong Zhang. 2023. "Multi-Objective Optimization of Square Corrugation Multilayer Nested Structures" Applied Sciences 13, no. 17: 9750. https://doi.org/10.3390/app13179750