
TwSense: Highly Robust Through-the-Wall Human Detection Method Based on COTS Wi-Fi Device

Abstract
:1. Introduction
- We proposed a highly robust method for through-the-wall human detection based on a ubiquitous commercial Wi-Fi device (TwSense). This method used the passive mode to detect the presence of people in the room using the CSI in the Wi-Fi signal. It also provided a solution for the emergency rescue and health monitoring of older people.
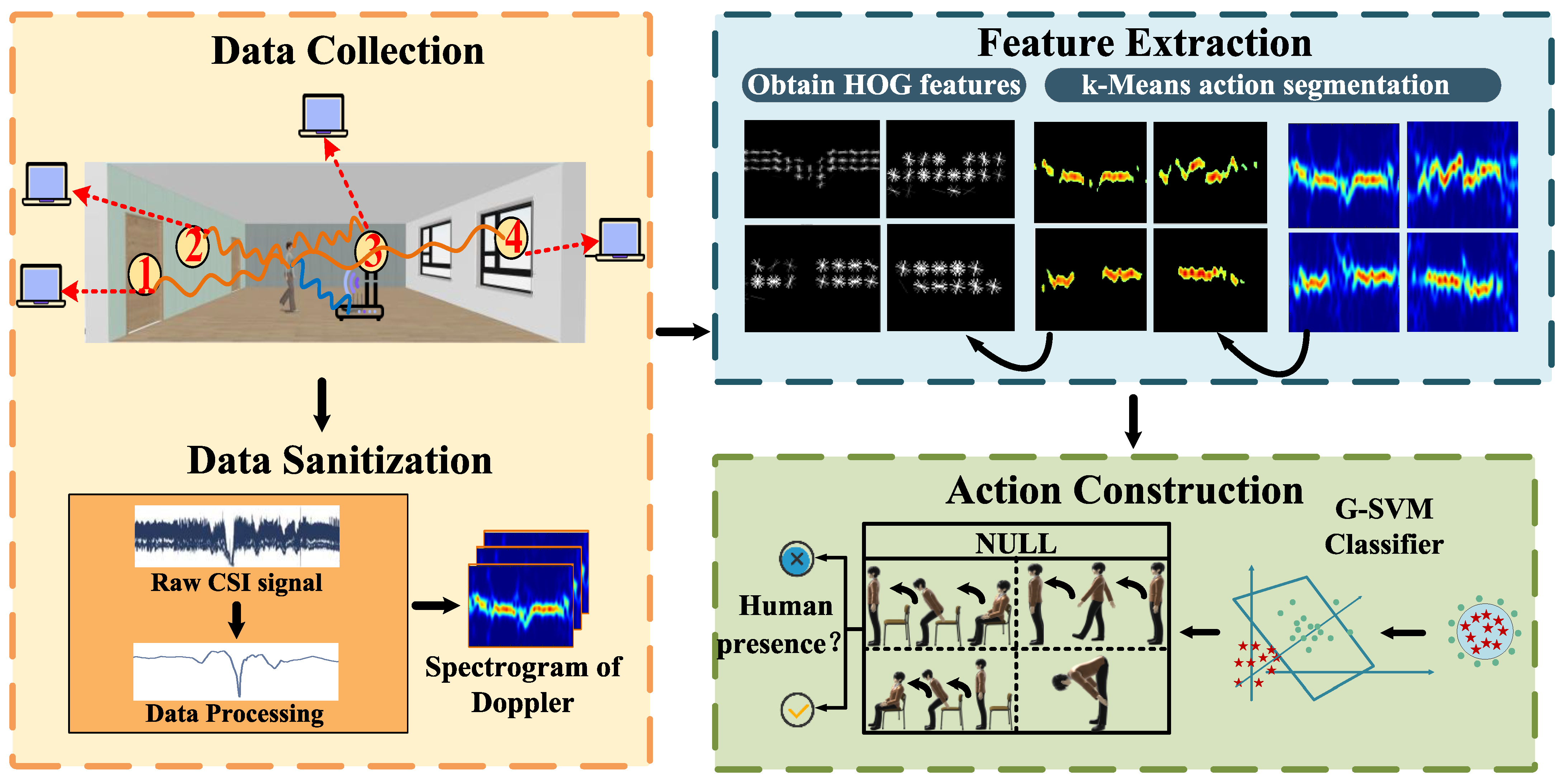
- In this paper, we adopted the OR-PCA method to extract the correlation of CSI, eliminated the noise generated from other obstacles, such as walls, used the clustering algorithm to segment the Doppler-shifted images caused by motion and then the HOG algorithm to obtain the critical features of the images, and finally fed them into the SVM classifier optimized by the grid search algorithm (G-SVM) for motion classification. This method not only distinguished the indoor personnel state (unoccupied, occupied) well but also improved the accuracy of human body detection in the case of through-the-wall detection.
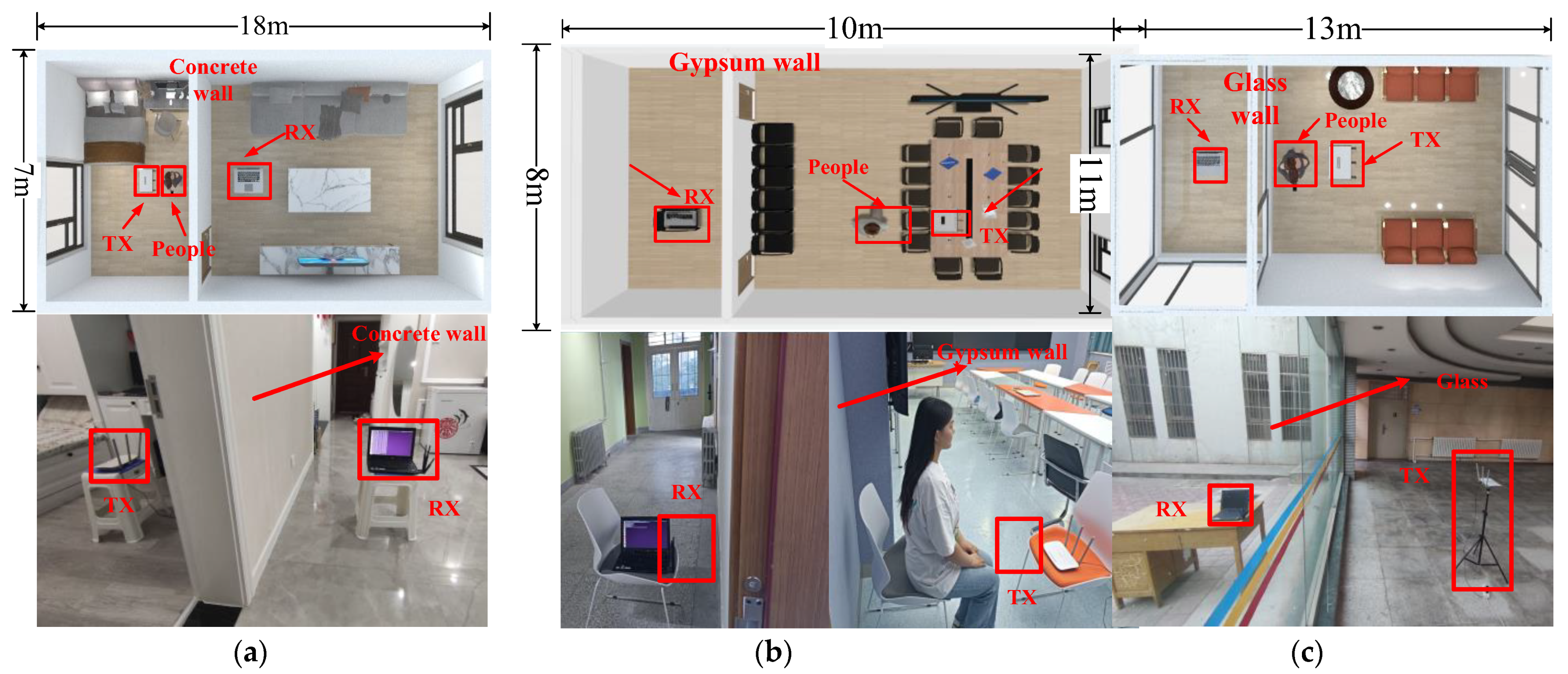
- We used commercially available Wi-Fi devices to collect various data for different wall materials and thicknesses, as well as for different personnel locations and device distances. The reliability and stability of the system were verified by adjusting various parameters. The final experimental results provided usage boundaries and deployment scenarios for through-the-wall practical applications.
2. Related Work
2.1. Radar Through-the-Wall
2.2. Wi-Fi Through-the-Wall
3. Preliminaries
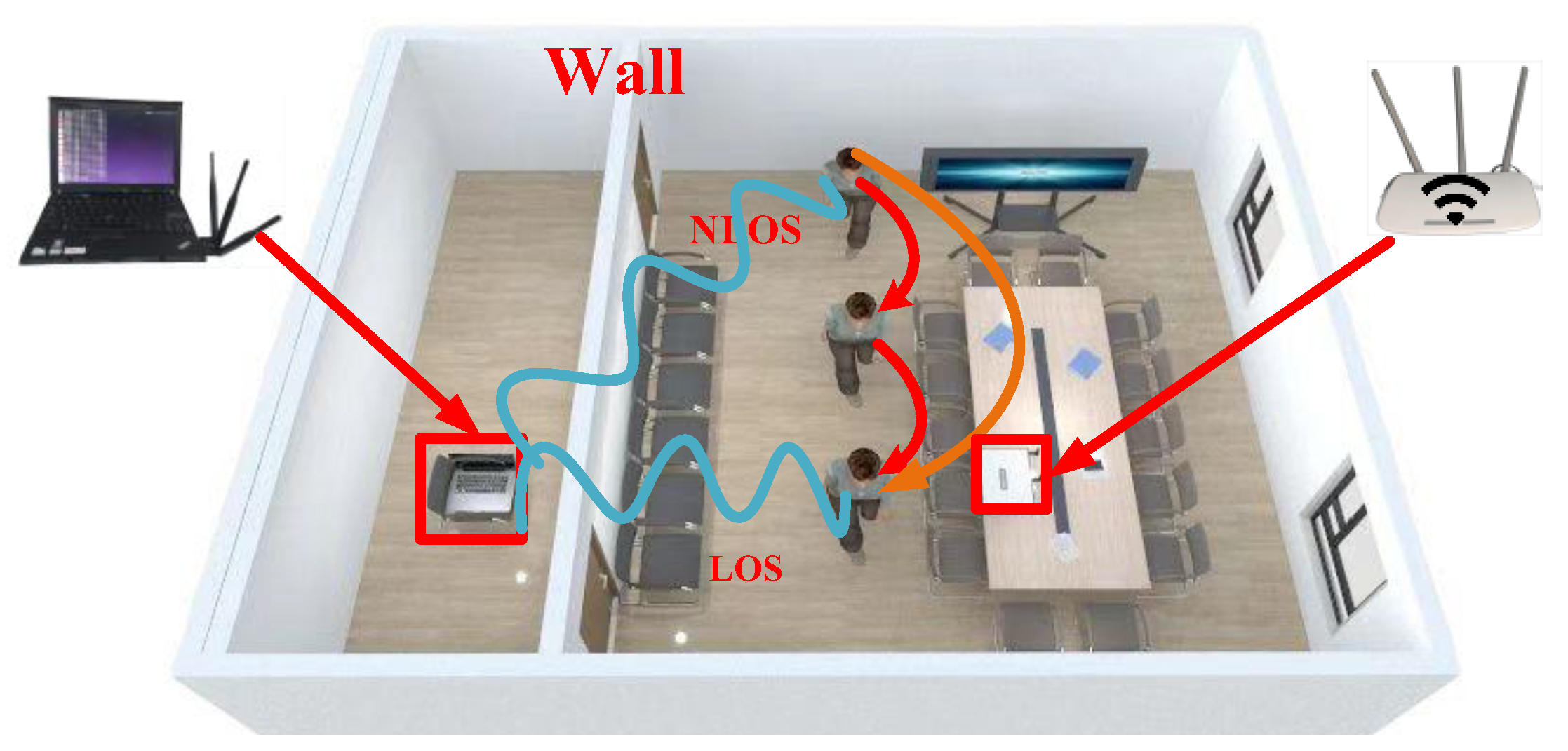
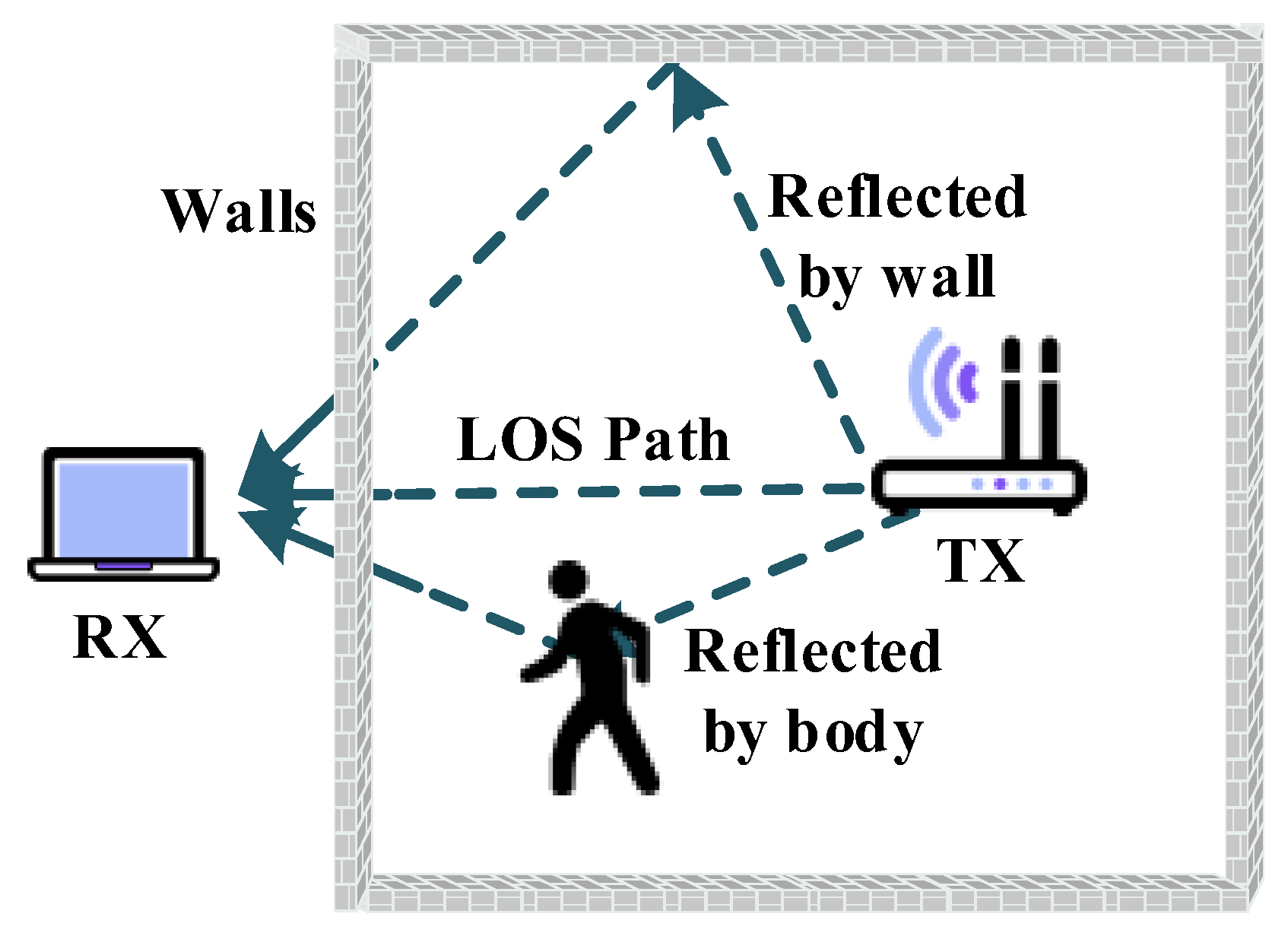
3.1. Through-the-Wall CSI Model
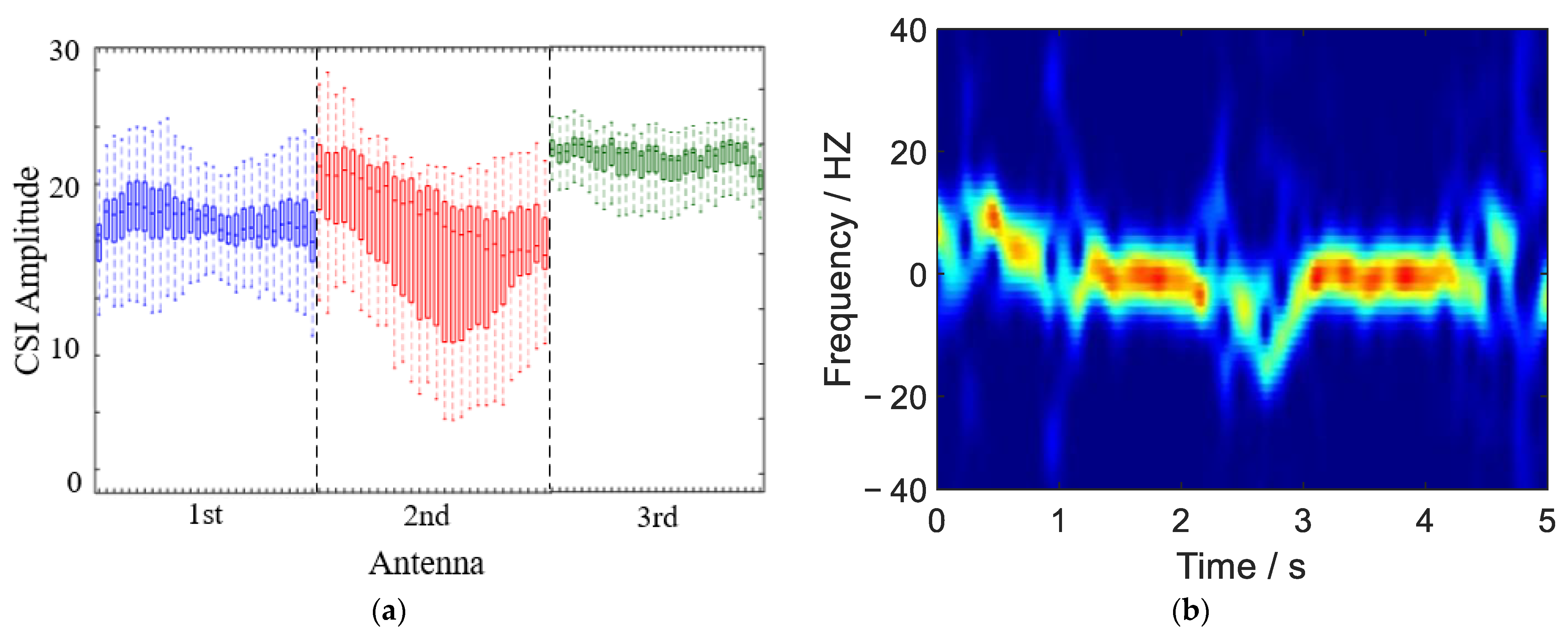
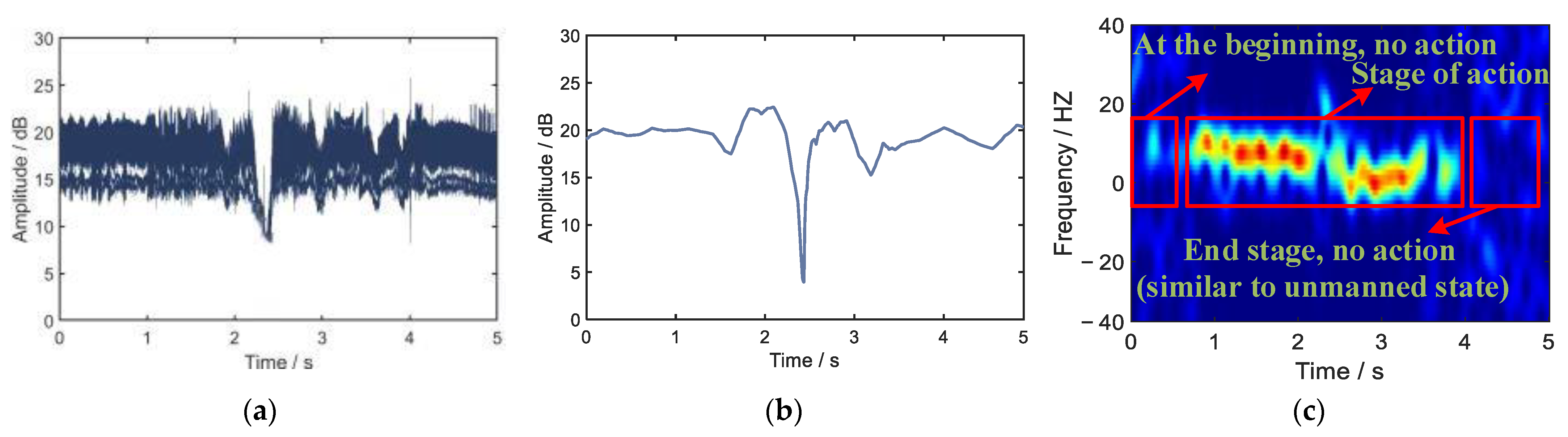
3.2. OR-PCA and Doppler Shift
4. System Architecture
4.1. System Overview
4.2. Data Preprocessing
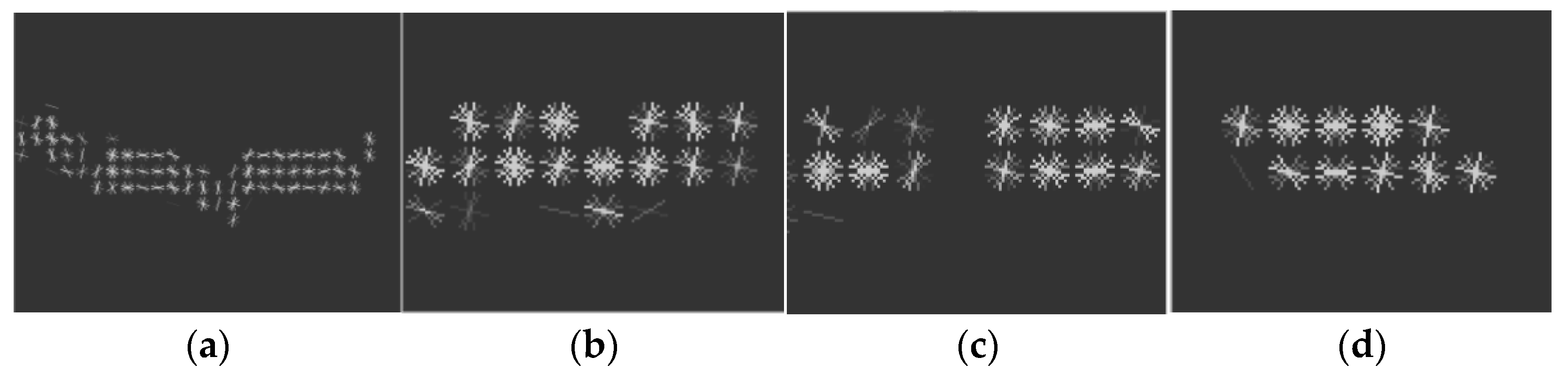
4.3. Motion Segmentation and Feature Extraction
4.4. G-SVM
| Algorithm 1: G-SVM |
| Input: Dataset: , learning algorithm: SVC; the number of training iterations: k. Output: (Maximum accuracy average) optimal parameters . Initialization: penalty factor [2−8, 28], kernel parameter [2−8, 28]. 1. For i = 1, 2…k do 2. Construct coordinate system at intervals of 1; 3. For = ,… do 4. K = Test, K − 1 = Train, Test[(C,g)]K-fold cross-validation, replace the training set and the test set 5. while Not is do 6. repeat step 3 and 4, Calculate the average classification accuracy under each parameter combination 7. end 8. end for 9. For = , ,… do 10. sort(avg) and select 11. end for 12. end for 13. Output: |
5. Results and Evaluation
5.1. Experimental Set Up
5.2. Analysis of Experimental Results
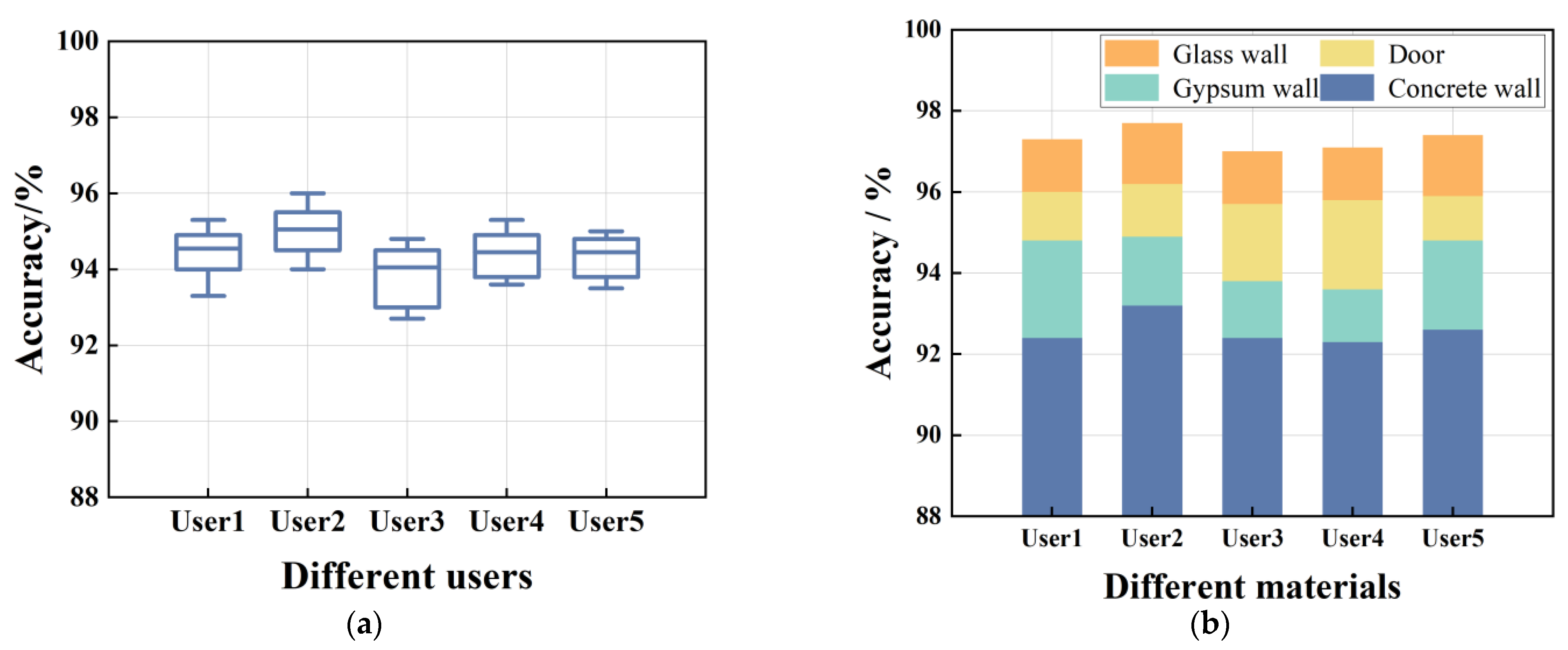
5.2.1. Influence on Different Users
5.2.2. Influence on Different Wall Thicknesses
5.2.3. Influence on Different Distances of Equipment
5.2.4. Influence of a Different Position
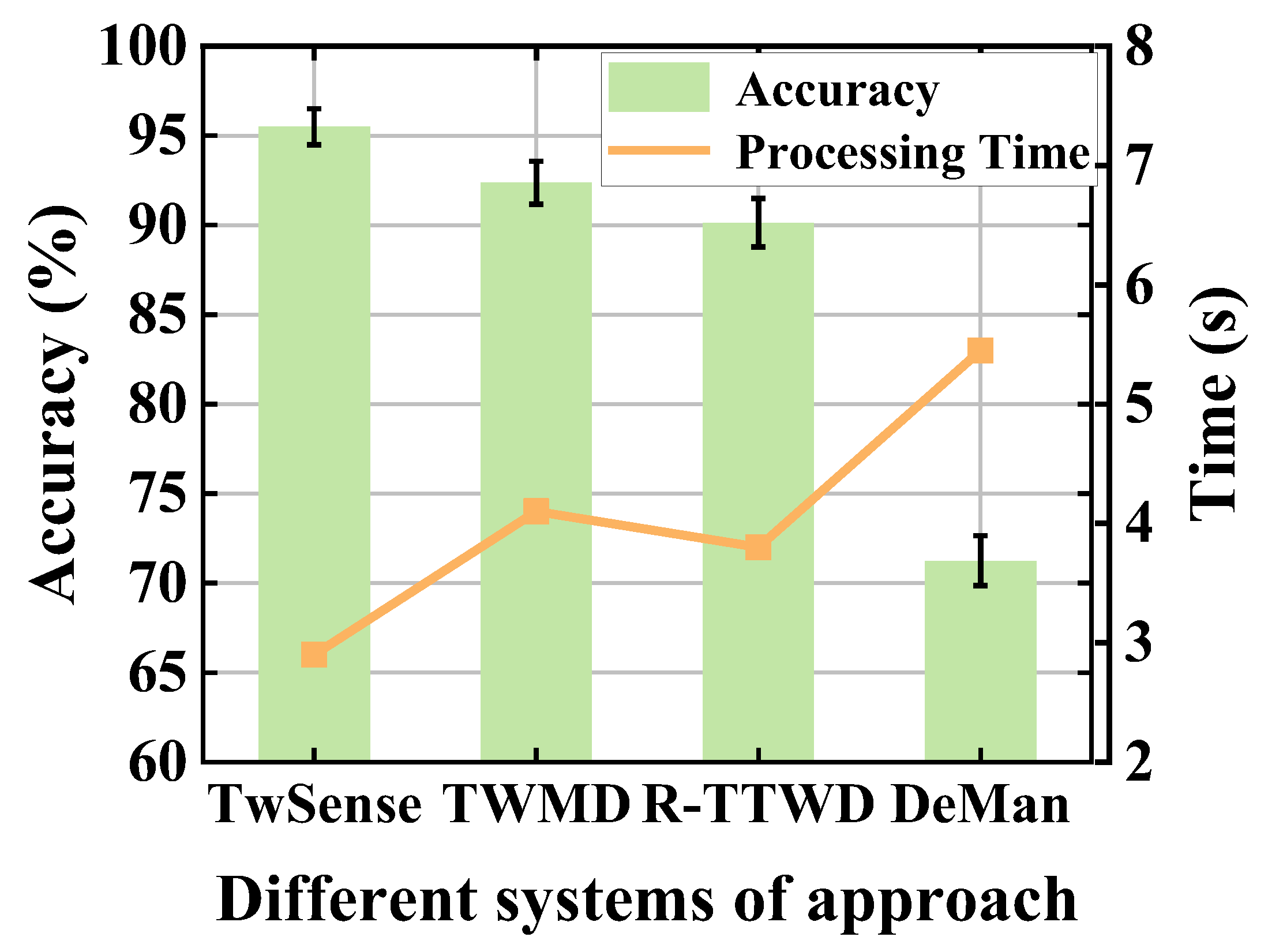
5.3. System Performance Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, R.; Ning, L.; Li, M. Feature extraction of trajectories for mobility modeling in 5G NB-IoT networks. Wirel. Netw. 2021. [Google Scholar] [CrossRef]
- Nirmal, I.; Khamis, A.; Hassan, M. Deep Learning for Radio-based Human Sensing: Recent Advances and Future Directions. IEEE Commun. Surv. Tutor. 2021, 99, 1. [Google Scholar] [CrossRef]
- Liu, H.; Liu, Y.; Chen, Y. A Survey on CSI-Based Human Behavior Recognition in Through-the-Wall Scenario. IEEE Access 2019, 7, 78772–78793. [Google Scholar]
- Wang, J.; Jiang, H.; Xiong, J. LiFS: Low Human-Effort, Device-Free Localization with Fine-Grained Subcarrier Information. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016; pp. 243–256. [Google Scholar]
- Xu, W.; Mi, Z.; Sawchuk, A.A. Robust Human Activity and Sensor Location Corecognition via Sparse Signal Representation IEEE Trans. Biomed. Eng. 2012, 59, 3169–3176. [Google Scholar]
- Fortin-Simard, D.; Bilodeau, J.S.; Bouchard, K. Exploiting Passive RFID Technology for Activity Recognition in Smart Homes. IEEE Intell. Syst. 2015, 30, 7–15. [Google Scholar] [CrossRef]
- Zhou, R.; Lu, X.; Fu, Y. Device-free crowd counting with WiFi channel state information and deep neural networks. Wirel. Netw. 2020, 26, 3495–3506. [Google Scholar]
- Wu, X.; Chu, Z.; Yang, P. TW-See: Human Activity Recognition through the Wall with Commodity Wi-Fi Devices. IEEE Trans. Veh. Technol. 2018, 68, 306–319. [Google Scholar]
- Ding, Y.P.; Gao, S.; Guo, X. Target Location Algorithm of Continuous Wave through Wall Radar Based on Extended Bezier Fitting Model. J. Signal Process. 2022, 38, 720–728. [Google Scholar]
- Dong, X.; Ren, W.; Xue, Z. A Time-Frequency Associated MUSIC Algorithm Research on Human Target Detection by Through-Wall Radar. J. Beijing Inst. Technol. Engl. Ed. 2022, 31, 123–130. [Google Scholar]
- Rohman, B.; Andra, M.B.; Nishimoto, M. Through-the-Wall Human Respiration Detection Using UWB Impulse Radar on Hovering Drone. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6572–6584. [Google Scholar] [CrossRef]
- Gong, Z.Y.; Lu, X.; Liu, Y.X. Device-Free Through-the-Wall Activity Recognition Using Bi-Directional Long Short-Term Memory and WiFi Channel State Information. J. Electron. Technol. 2021, 19, 357–368. [Google Scholar]
- Guo, Z.; Xiao, F.; Sheng, B.; Sun, L.; Yu, S. TWCC: A Robust Through-the-Wall Crowd Counting System Using Ambient WiFi Signals. IEEE Trans. 2022, 71, 4198–4211. [Google Scholar] [CrossRef]
- Yuan, Z.; Wu, S.; Yang, X.; Ailin, H. Device-Free Stationary Human Detection with WiFi in Through-the-Wall Scenarios; Springer: Berlin/Heidelberg, Germany, 2019; Volume 1, pp. 201–208. [Google Scholar]
- Wang, J.; Tian, Z.; Yang, X. TWPalo: Through-the-wall passive localization of moving human with Wi-Fi. Comput. Commun. 2020, 157, 284–297. [Google Scholar] [CrossRef]
- He, Y.; Chen, Y.; Hu, Y. WiFi Vision: Sensing, Recognition, and Detection with Commodity MIMO-OFDM WiFi. IEEE Internet Things J. 2020, 7, 8296–8317. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall PTR: Hoboken, NJ, USA, 1996. [Google Scholar]
- Chandrasekaran, V.; Sanghavi, S.; Parrilo, P.A. Sparse and Low-Rank Matrix Decompositions Communication, Control, and Computing, Allerton 2009. In Proceedings of the 47th Annual Allerton Conference on Communication, Control, and Computing, Monticello, IL, USA, 30 September–2 October 2009. [Google Scholar]
- Zheng, Y.; Zhang, Y.; Qian, K. Zero-Effort Cross-Domain Gesture Recognition with Wi-Fi. In Proceedings of the 17th Annual International Conference, Seoul, Republic of Korea, 17–21 June 2019. [Google Scholar]
- Wang, Y.; Lei, Y.; Zhang, Y. A robust indoor localization method with calibration strategy based on joint distribution adaptation. Wirel. Netw. 2021, 27, 1739–1753. [Google Scholar] [CrossRef]
- Liu, W.; Huang, Q.; Wei, M. Image Quality Evaluation Based on SVM and Improved Grid Search Algorithm. In Proceedings of the 2020 IEEE 15th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, 25–29 February 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Halperirr, D.; Hu, W.; Sheth, A. Tool release: Gathering 802.11n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Zhou, Z.; Liu, X.; Liu, Y.; Cao, J. Non-Invasive Detection of Moving and Stationary Human With WiFi. IEEE J. Sel. Areas Commun. 2015, 33, 2329–2342. [Google Scholar] [CrossRef]
- Zhu, H.; Xiao, F.; Sun, L.; Wang, R.; Yang, P. R-TTWD: Robust Device-Free Through-The-Wall Detection of Moving Human With WiFi. IEEE J. Sel. Areas Commun. 2017, 35, 1090–1103. [Google Scholar] [CrossRef]
- Yang, X.; Wu, S.; Zhou, M. Indoor through-the-Wall Passive Human Target Detection with WiFi. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; IEEE: New York, NY, USA, 2020. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Building Materials | 5 GHz |
|---|---|
| Glass wall 1.18 inches | 3 dB |
| Wooden Door 1.75 inches | 6 dB |
| Gypsum wall 11 inches | 13 dB |
| Concrete wall 15 inches | 15 dB |
| Experimental Scene | Wall Materials | Accuracy (%) |
|---|---|---|
| bedroom | Concrete wall | 93.6 |
| meeting room | Gypsum wall | 94.8 |
| meeting room | Door | 96.5 |
| hall | Glass wall | 97.3 |
| Experimental Scene | System | Method | Different Material Recognition Accuracy (%) | |||
|---|---|---|---|---|---|---|
| Concrete Wall | Gypsum Wall | Wooden Door | Glass Wall | |||
| bedroom, meeting room, hall | TwSense | OR-PCA+HOG+Doppler+G-Svm | 93.6 | 94.8 | 96.5 | 97.3 |
| TWMD | BP Network | 90 | 91 | 93 | 95.5 | |
| R-TTWD | PCA+SVM | 87 | 89 | 91.5 | 93 | |
| DeMan | Sine model+Parameter estimation | 50 | 71 | 79 | 85 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Hao, Z.; Dang, X.; Han, K. TwSense: Highly Robust Through-the-Wall Human Detection Method Based on COTS Wi-Fi Device. Appl. Sci. 2023, 13, 9668. https://doi.org/10.3390/app13179668
Zhang Z, Hao Z, Dang X, Han K. TwSense: Highly Robust Through-the-Wall Human Detection Method Based on COTS Wi-Fi Device. Applied Sciences. 2023; 13(17):9668. https://doi.org/10.3390/app13179668
Chicago/Turabian StyleZhang, Zinan, Zhanjun Hao, Xiaochao Dang, and Kaikai Han. 2023. "TwSense: Highly Robust Through-the-Wall Human Detection Method Based on COTS Wi-Fi Device" Applied Sciences 13, no. 17: 9668. https://doi.org/10.3390/app13179668