4.1. Dataset
Experimental data were obtained from the brain glioma public datasets BraTS2018 [
24,
25] and BraTS2019 [
26,
27] provided by the International Association for Medical Image Computing and Computer Aided Intervention (MICCAI). The training set in BraTS2019 has 285 cases (210 HGG patients and 75 LGG patients). An MR sequence has 155 images, each with a size of 240 × 240. Each case has four modalities (T1, T2, T1ce, Flair) and the corresponding standard segmentation label map (ground truth, GT). Compared with BraTS2019, BraTS2018 has 49 fewer HGGs and 1 fewer LGGs. In this paper, the extra 50 cases in BraTS2019 were used as the test set. The data in BraTs2018 are divided into a training set and a validation set in a 7:3 ratio, and each time the network is trained, they are randomly re-divided according to this ratio.
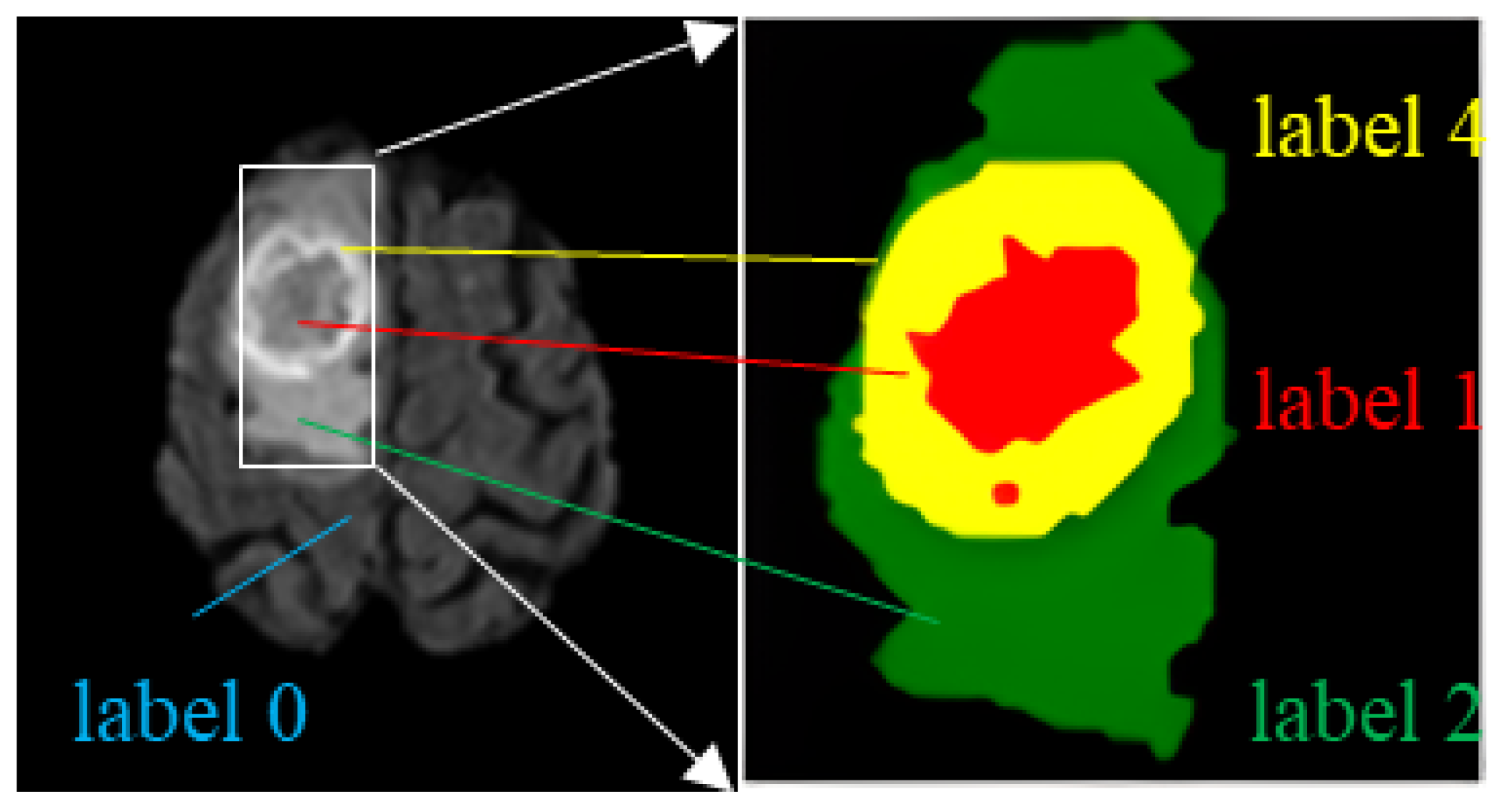
There are four label categories in the dataset: label 0 represents a healthy region; label 1 represents a region of necrotic and non-enhanced tumors; label 2 represents a peritumor edema region; and label 4 represents an enhanced tumor region. Brain tumors need to be segmented into three regions: the WT region, the TC region, and the ET region. WT includes the regions with labels 1, 2, and 4; TC includes labels 1 and 4; ET includes only label 4, as shown in
Table 2. An example of an MRI brain tumor image is shown in
Figure 5, where each label is represented using a corresponding color: label 1 region with red, label 2 with green, and label 4 with yellow.
4.2. Evaluation Metrics
In this paper, the dice similarity coefficient (
Dice),
Precision, and
Sensitivity are used as performance evaluation metrics, which can be expressed as follows:
where
TP denotes the number of positive classes correctly detected;
FN denotes the number of positive classes mistaken for negative classes; and
FP denotes the number of negative class samples mistaken for positive class samples.
The dice similarity coefficient indicates the overlap rate of the algorithm segmentation results with the real labels. When the value of the dice is 0, the segmentation result is the worst, which means that all the pixel points segmented by the algorithm do not overlap with all the pixel points of the standard segmentation label; when the value of the dice is 1, it means that all the pixel points of the actual segmentation result overlap with the corresponding position of the real label, and the segmentation result is the best at this time.
Precision indicates that the positive predictive value is similar to the true positive rate, reflecting the accuracy of the actual segmentation results. A higher precision value means that more pixels are correctly classified in the actual segmentation result.
Sensitivity is defined as
Sensitivity indicates the ratio of focal areas correctly predicted by the model to the true labeled focal areas and measures the sensitivity of the model to the focal areas.
4.3. Pre-Processing
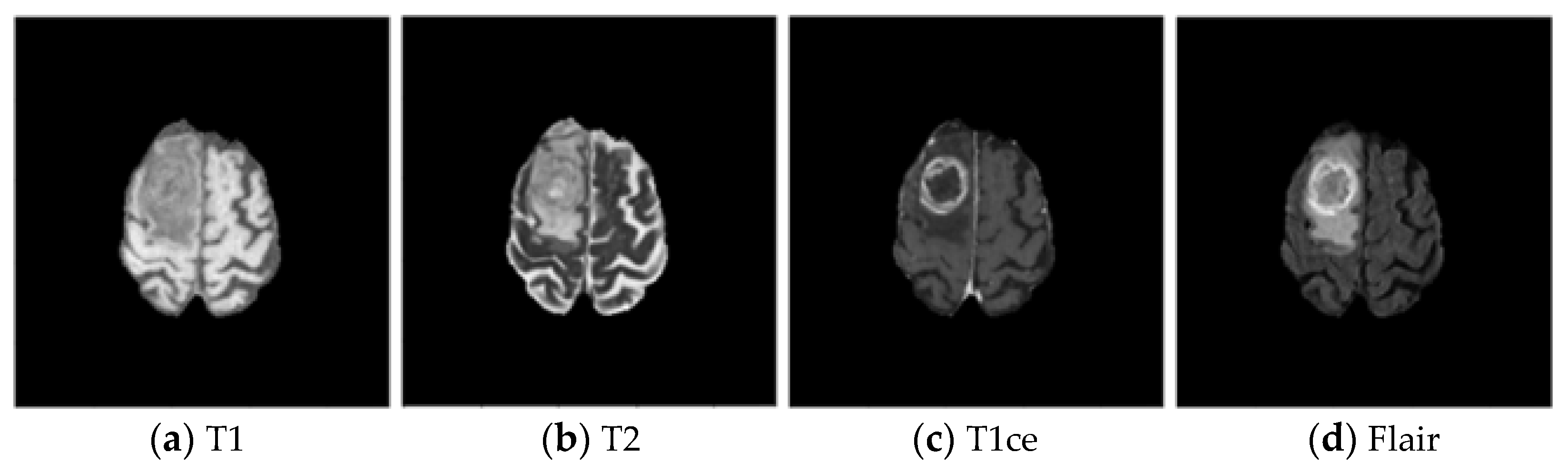
BraTS2018 and BraTS2019 use four sequences of MR images—T1, T2, T1ce, and Flair—which have different contrasts. Therefore, the z-score method is used to standardize each modal image separately, subtracting the mean from the image and dividing it by the standard deviation to eliminate the impact of different contrasts [
28]. In an MRI image, the gray area represents the brain region, while the black area represents the background. The background has a large proportion in the entire image and is not helpful for segmentation. Therefore, it is necessary to remove the background information around the brain region. Meanwhile, cropping makes the network a little smaller and improves the performance of the network. Since the whole 3D image occupies too much RAM and affects the input of the network, this experiment requires chunking of the 3D MRI images. To chunk evenly, five black slices are added to the original sequence, that is, four modal images and the corresponding mask (155, 240, 240). The chosen chunk size is 32, 160, 160, i.e., five chunks with size of 32, 160, 160 are divided from the axial direction, and the resolution of the chunks is set to an even number to make them integer divisible when they are down-sampled through the pooling layer.
4.4. Results and Discussion
All experiments in this paper were conducted in the same training environment configuration: AMD 5950X, CPU 64GB RAM, and NVIDIA GeForce RTX3090 24G GPU. PyTorch1.12 framework and Anaconda Python3.7 interpreter built the network framework. The weight decay is 1 × 10−4; the total epoch is 100 times; the initial learning rate is 3 × 10−4; the batch size is 4; and the activation function is Softmax.
To evaluate the segmentation performance of the proposed model, comparative experiments were conducted in three aspects.
Table 3 gives the comparison of the dice similarity coefficient of the proposed model with the other ten models in the extraction of WT, TC, and ET. From
Table 3, it can be concluded that our model significantly improved overall accuracy compared to the 2D segmentation networks, especially in the ET area. It also handles the details of the TC area well. The dice similarity coefficient of WT reaches 0.778; TC dice reaches 0.875, which is about 0.054 higher than that of the 2D U-Net; ET dice reaches 0.903, which is about 0.137 higher than that of the 2D U-Net.
Table 4 gives the sensitivity comparison of the proposed model with the other ten models in the extraction of WT, TC, and ET. As shown in
Table 4, the sensitivity of WT, TC, and ET reaches 0.906, 0.926, and 0.946, respectively, which represents an improvement of 3.8%, 0.9%, and 6.5% compared to the 2D U-Net. This shows that the 3D U-Net model designed in this paper can better handle the segmentation of different tumor regions.
Table 5 gives the precision comparison of the proposed model with the other ten models in the extraction of WT, TC, and ET. As shown in
Table 5, the model in this paper outperforms other models in terms of TC precision and ET precision, reaching 0.895 and 0.946, respectively. However, WT precision is relatively low, only reaching 0.801.
The binary cross-entropy loss function can optimize the network in the process of network training, effectively solve the problem of vanishing gradient in the network, and make the network run stably. However, when faced with images with class imbalance problems, the loss function will exhibit bias toward samples with many classes, thus affecting the optimization direction of the network. The dice similar loss function can guide the learning of network parameters and make the prediction result close to the real value.
In this paper, experiments are conducted to verify whether adding the dice similar loss function to the binary cross-entropy loss function can improve the performance of glioma segmentation. The experimental results are shown in
Table 6.
It can be seen from
Table 5 that the mixed loss function composed of binary cross- entropy loss function and dice similarity coefficient can alleviate the class imbalance problem in brain glioma image segmentation to a certain extent and obtain good network segmentation results.
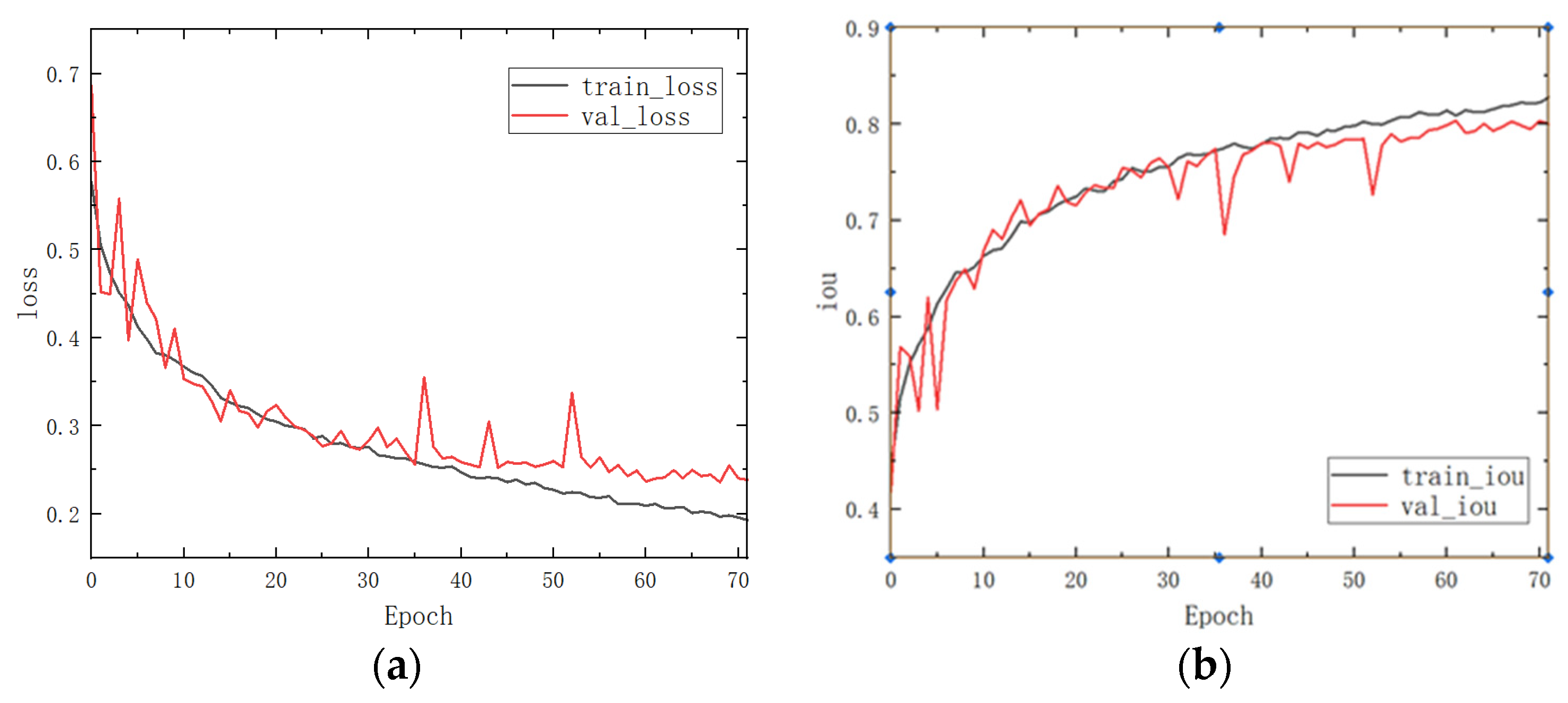
To verify the advantages of this paper’s model more intuitively, the change curves of loss and Iou with the number of epochs in the training and validation sets during the training process are shown in
Figure 6, which can intuitively show the superiority of this paper’s algorithm.
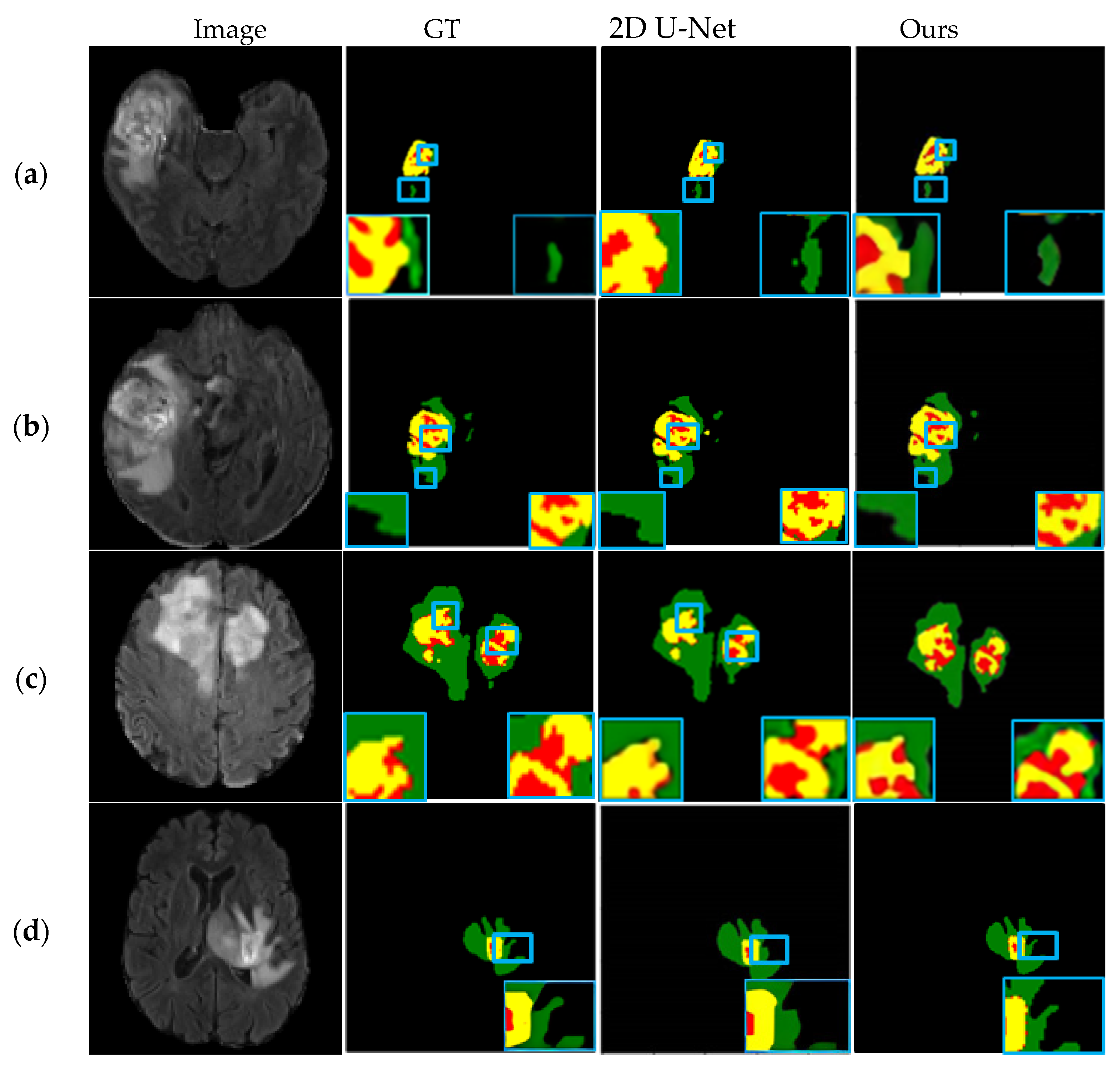
The extraction effects of different tumor regions are shown in
Figure 7. The first column depicts the original Flair MR images of four different cases. Columns 2–4 are their corresponding segmentation results of the GT, 2D U-Net, and 3D U-Net models in this paper.
As can be seen in
Figure 7a, the overall segmentation effect of the network in this paper is better, and the boundaries of different tumor regions can be segmented more accurately, especially the tumor core area, and the segmentation results are similar to GT. As can be seen in
Figure 7b,c, the tumor enhancement region and the core region are segmented more accurately, and the contour boundary is clearer, and the brain tumor segmentation results prove that the algorithm in this paper has better segmentation performance. In
Figure 7d, the location of the tumor is determined, but the boundary segmentation of the edema area around the tumor is relatively rough, and the segmentation effect of the whole tumor area is not very satisfactory, and the network will continue to be improved subsequently.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}