
Design and Control of a Linear Rotary Electro-Hydraulic Servo Drive Unit

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
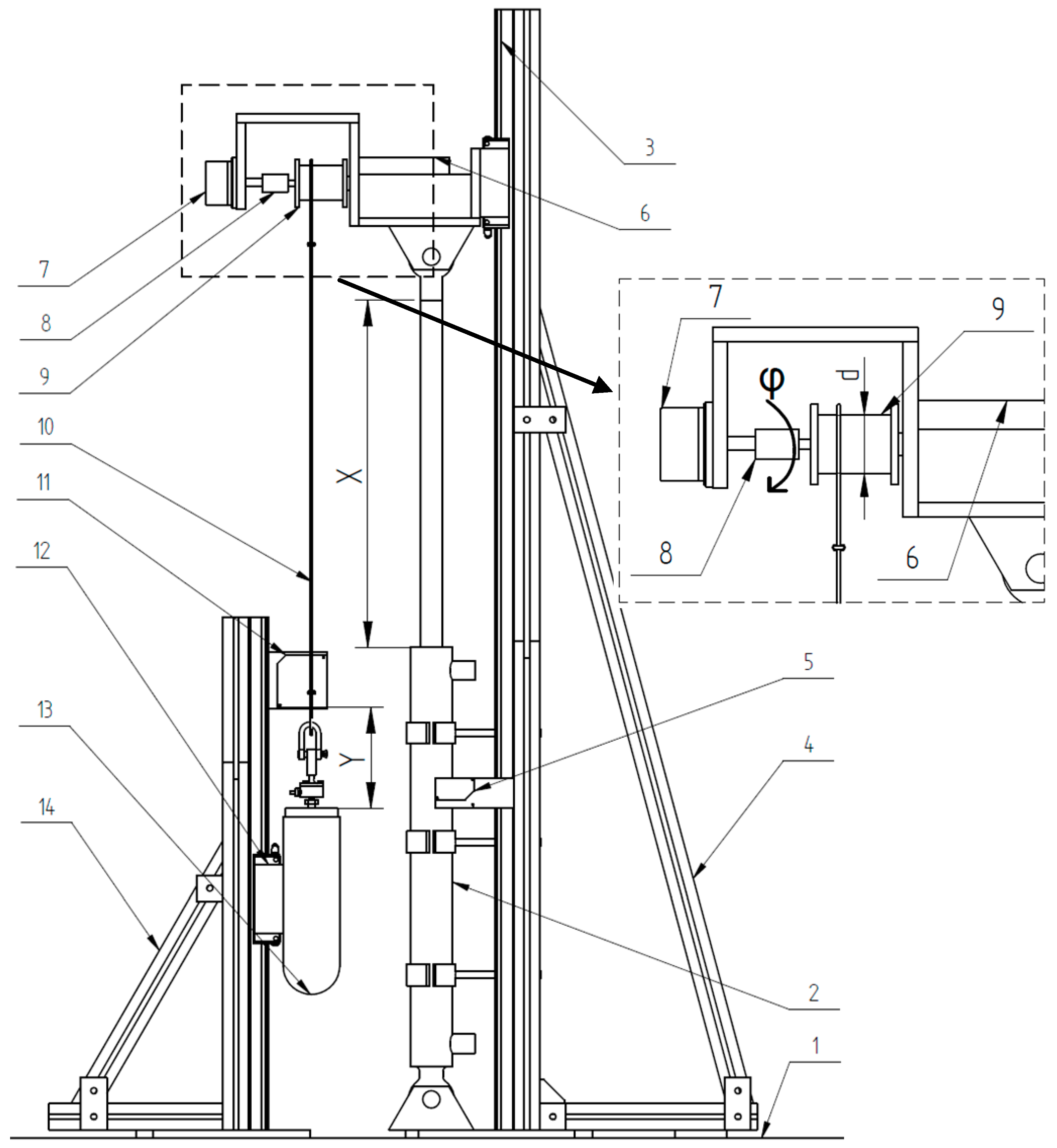
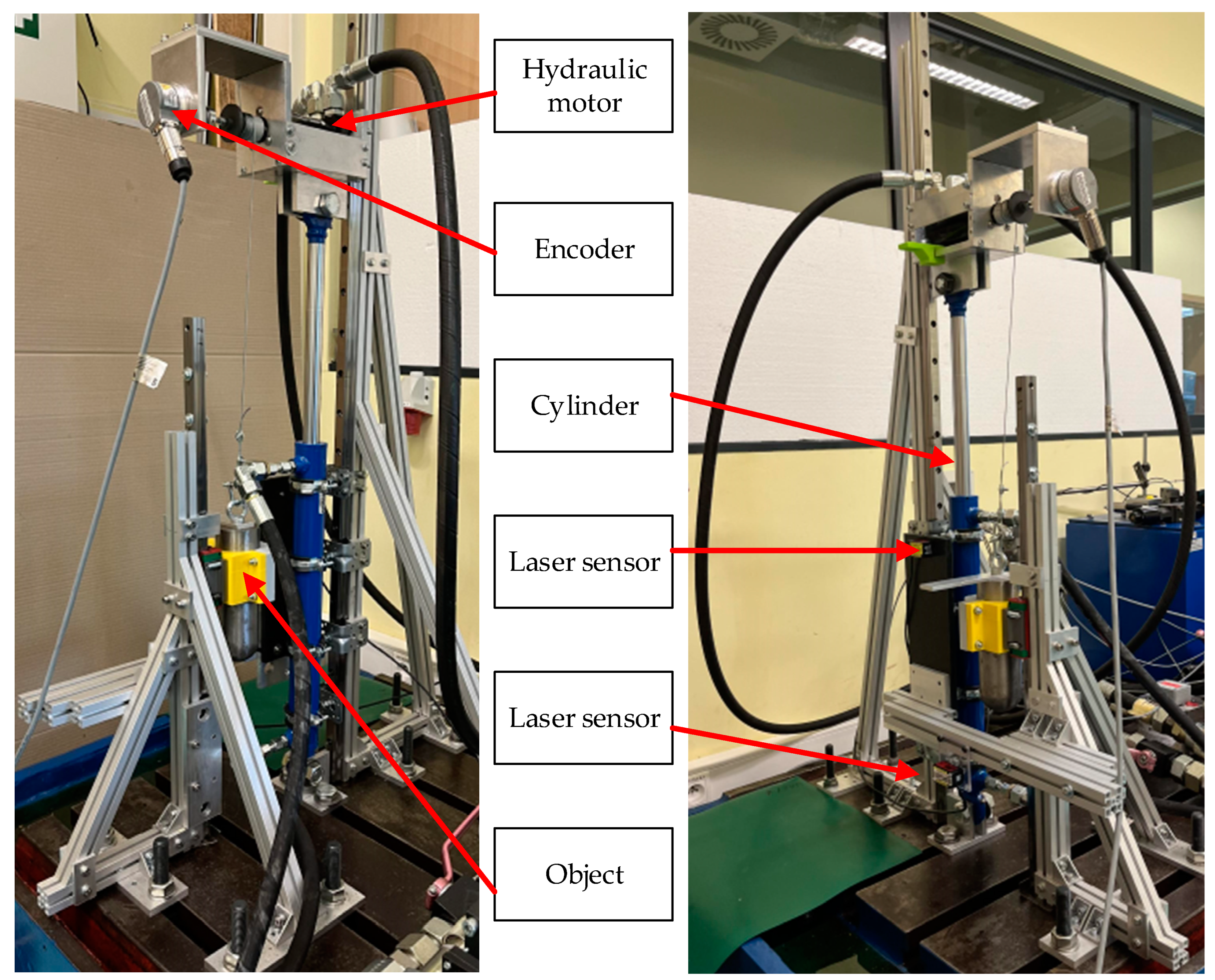
2. Linear Rotary Electro-Hydraulic Servo Drive Unit
- φ—angular displacement [rad],
- R—drum radius [mm],
- xp—measured number of pulses,
- s—linear distance [mm].
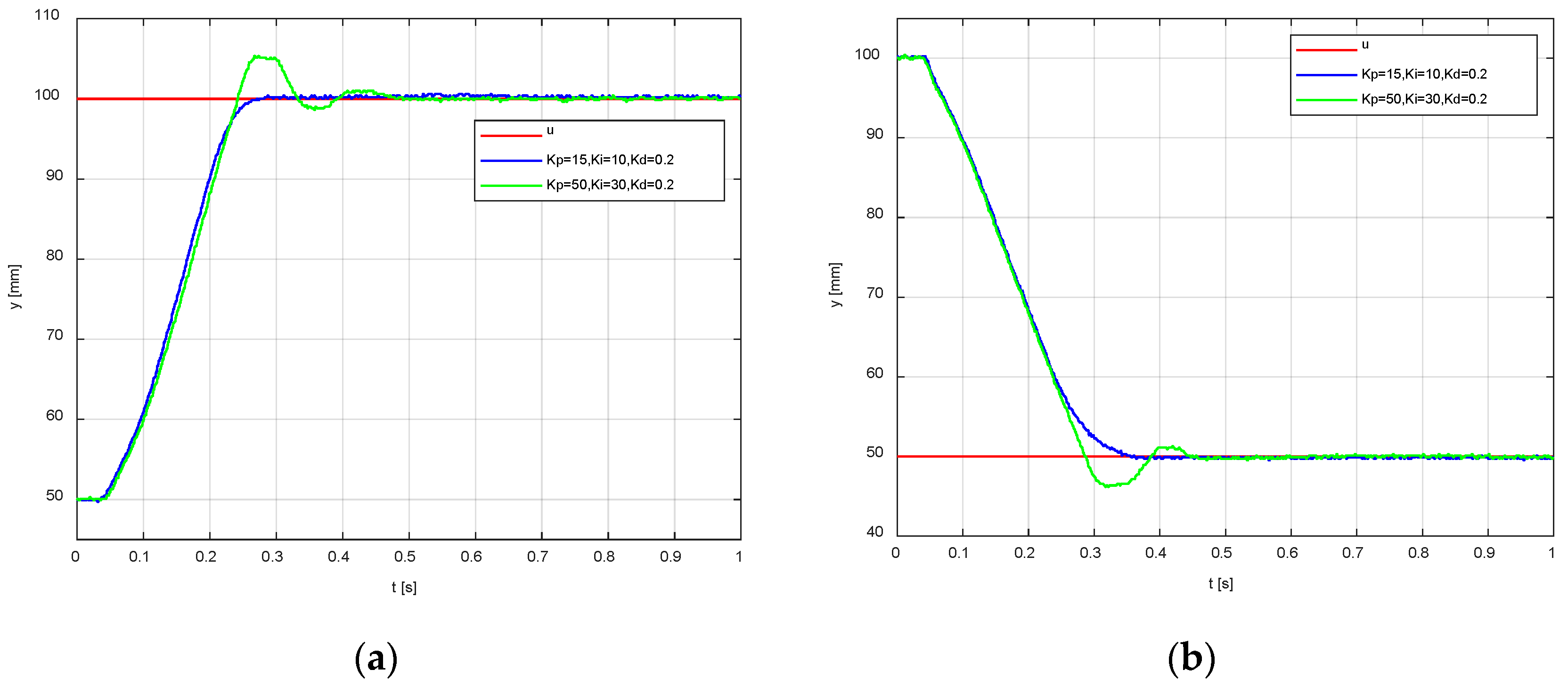
3. Investigation
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Murrenhoff, H. Fundamentals of Fluid Power; Hydraulics Part 1; Shaker Verlag GmbH: Aachen, Germany, 2014. [Google Scholar]
- Chapple, P. Principles of Hydraulic Systems Design, 1st ed.; Coxmoor Publishing Company: Chipping Norton, UK, 2003. [Google Scholar]
- Rabie, M.G. Fluid Power Engineering; McGraw Hill Professional: New York, NY, USA, 2009; ISBN 978-0-07-162606-4. [Google Scholar]
- Backe, W. Untersuchung des Einflusses von Störkräften auf den Schaltvorgang bei Wegeventilen der Hydraulik; Springer: Berlin/Heidelberg, Germany, 1975. [Google Scholar] [CrossRef] [Green Version]
- Akers, A.; Gassman, M.; Smith, R. Hydraulic Power System Analysis; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar] [CrossRef]
- Moog, Electro-Hydraulic Valves—A Technical Look; Electro-Hydraulic Valves; Moog Inc.: New York, NY, USA, 2016.
- Rybarczyk, D. PLC Implementation of Fractional PI Controller in Positioning of Electrohydraulic Servodrive. Control. Cybern. 2016, 45, 301–316. [Google Scholar]
- Wos, P.; Dindorf, R. Adaptive Control of the Electro-Hydraulic Servo-System with External Disturbances. Asian J. Control. 2013, 15, 1065–1080. [Google Scholar] [CrossRef]
- AL-Assady, A.A.M.H.; AL-Khafaji, M.T.J. Design and Analysis of Electro-Hydraulic Servo System for Speed Control of Hy-draulic Motor. J. Eng. 2013, 19, 562–573. [Google Scholar] [CrossRef]
- Entao, Z.; Wenlin, Y.; Junzhe, L. Predictive Control of Hydraulic Winch Motion Control. In Proceedings of the 2009 2nd IEEE International Conference on Computer Science and Information Technology, Beijing, China, 8–11 August 2009; pp. 1–4. [Google Scholar]
- Sato, Y. Rotational Speed Control of Hydraulic Motor Using Sliding Mode Control. Trans. Jpn. Soc. Mech. Eng. Ser. C 2001, 67, 2559–2564. [Google Scholar] [CrossRef] [Green Version]
- Sinthipsomboon, K.; Hunsacharoonroj, I.; Khedari, J.; Pongaen, W.; Pratumsuwan, P. A Hybrid of Fuzzy and Fuzzy Self-Tuning PID Controller for Servo Electro-Hydraulic System. In Proceedings of the 2011 6th IEEE Conference on Industrial Electronics and Applications, Beijing, China, 21–23 June 2011; pp. 220–225. [Google Scholar]
- Tran, N.H.; Le, C.; Ngo, A.D. An Investigation on Speed Control of a Spindle Cluster Driven by Hydraulic Motor: Application to Metal Cutting Machines. Int. J. Rotating Mach. 2019, 2019, 4359524. [Google Scholar] [CrossRef]
- Woś, P.; Dindorf, R. Synchronization of the movement for multi-cylinder electrohydraulic servo driver. In Proceedings of the EPJ Web of Conferences, Santiago de Compostela, Spain, 24–28 October 2022; EDP Sciences: Ulis, France, 2022; Volume 269, p. 01069. [Google Scholar]
- Shen, J.; Cui, H.; Feng, K.; Zhang, H.; Li, H. Parameter identification and control algorithm of electrohydraulic servo system for robotic excavator based on improved hammerstein model. Math. Probl. Eng. 2020, 2020, 9216019. [Google Scholar]
- Yang, J.; Liu, B.; Zhang, T.; Hong, J.; Zhang, H. Application of energy conversion and integration technologies based on electro-hydraulic hybrid power systems: A review. Energy Convers. Manag. 2022, 272, 116372. [Google Scholar] [CrossRef]
- Zhou, S.; Shen, C.; Xia, Y.; Chen, Z.; Zhu, S. Adaptive robust control design for underwater multi-dof hydraulic manipulator. Ocean. Eng. 2022, 248, 110822. [Google Scholar] [CrossRef]
- Petrović, G.R.; Mattila, J. Mathematical modelling and virtual decomposition control of heavy-duty parallel–serial hydraulic manipulators. Mech. Mach. Theory 2022, 170, 104680. [Google Scholar] [CrossRef]
- Zhang, X.; Shi, G. Dual extended state observer-based adaptive dynamic surface control for a hydraulic manipulator with actuator dynamics. Mech. Mach. Theory 2022, 169, 104647. [Google Scholar] [CrossRef]
- Luo, S.; Cheng, M.; Ding, R.; Wang, F.; Xu, B.; Chen, B. Human–Robot Shared Control Based on Locally Weighted Intent Prediction for a Teleoperated Hydraulic Manipulator System. IEEE/ASME Trans. Mechatron. 2022, 27, 4462–4474. [Google Scholar] [CrossRef]
- Zhang, J.; Yuan, Z.; Dong, S.; Sadiq, M.T.; Zhang, F.; Li, J. Structural Design and Kinematics Simulation of Hydraulic Biped Robot. Appl. Sci. 2020, 10, 6377. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Milecki, A.; Jakubowski, A.; Kubacki, A. Design and Control of a Linear Rotary Electro-Hydraulic Servo Drive Unit. Appl. Sci. 2023, 13, 8598. https://doi.org/10.3390/app13158598
Milecki A, Jakubowski A, Kubacki A. Design and Control of a Linear Rotary Electro-Hydraulic Servo Drive Unit. Applied Sciences. 2023; 13(15):8598. https://doi.org/10.3390/app13158598
Chicago/Turabian StyleMilecki, Andrzej, Arkadiusz Jakubowski, and Arkadiusz Kubacki. 2023. "Design and Control of a Linear Rotary Electro-Hydraulic Servo Drive Unit" Applied Sciences 13, no. 15: 8598. https://doi.org/10.3390/app13158598