
Detection of Anomalous Behavior of Manufacturing Workers Using Deep Learning-Based Recognition of Human–Object Interaction

Abstract
:1. Introduction
2. Related Works
3. Anomalous Behavior Detection
3.1. Problem Statement
3.2. Body Motion-Based Anomaly Detection
4. Proposed Method
5. Implementation of the Study
5.1. Implementation Result
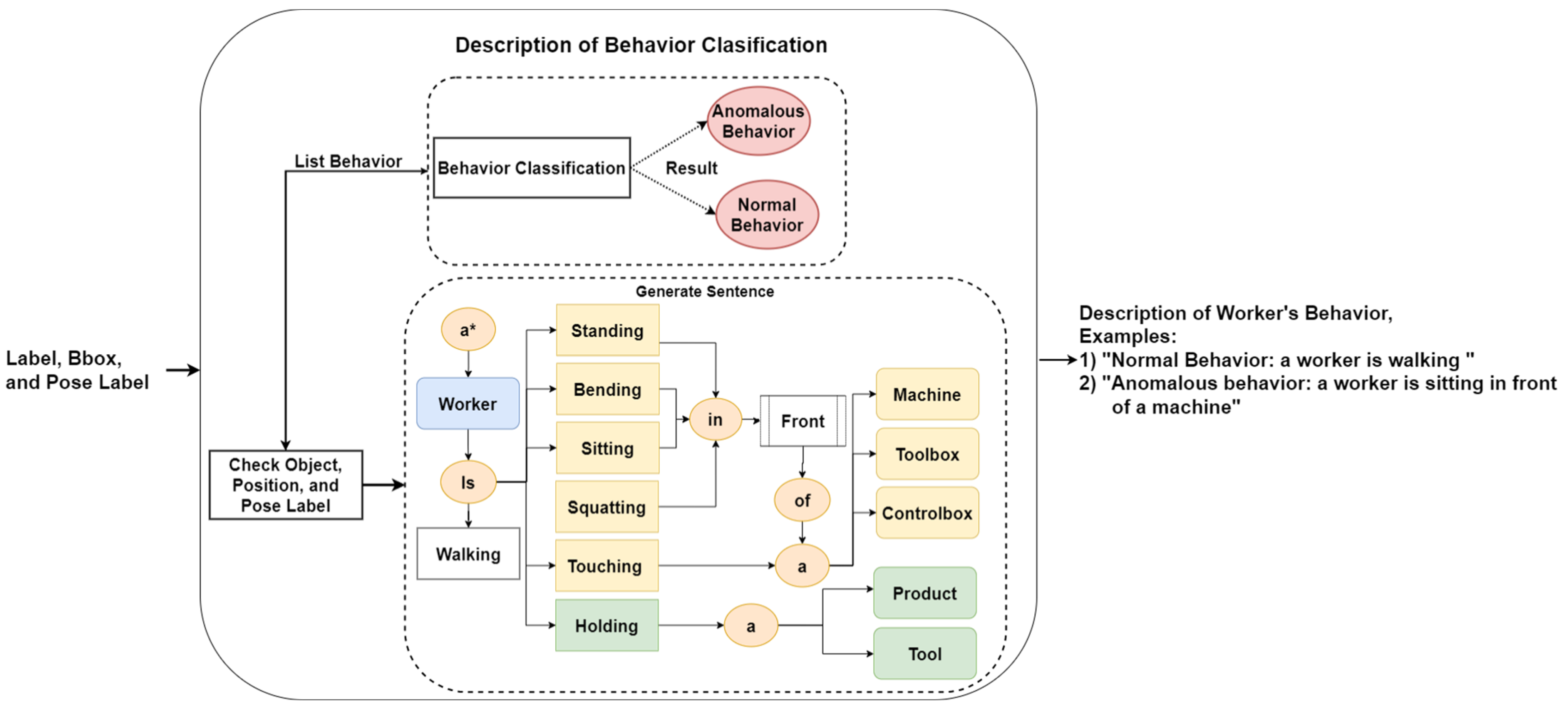
| Algorithm 1: Worker behavior description |
| Input: Frame (f(t)), Object_label, Bbox, Pose_label Output: Descriptive text of worker behavior (normal/anomalous behavior)
|
5.2. Performance Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Forkan, A.R.M.; Montori, F.; Georgakopoulos, D.; Jayaraman, P.P.; Yavari, A.; Morshed, A. An Industrial IoT Solution for Evaluating Workers’ Performance via Activity Recognition. In Proceedings of the 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS), Dallas, TX, USA, 7–10 July 2019; pp. 1393–1403. [Google Scholar]
- Daud, M.M.; Saad, H.M.; Ijab, M.T. Conceptual Design of Human Detection via Deep Learning for Industrial Safety Enforcement in Manufacturing Site. In Proceedings of the 2021 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS 2021), Shah Alam, Malaysia, 26–26 June 2021; pp. 369–373. [Google Scholar]
- Han, Y.; Yu, D.; Han, F.; Liu, Y.; Zhao, Q. Industrial APP Design for Data Dynamic Monitoring of Strip Production Process. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 2865–2869. [Google Scholar]
- Savitha, C.; Ramesh, D. Motion Detection in Video Surveillance: A Systematic Survey. In Proceedings of the IEEE 2nd international conference on inventive systems and control (ICISC), Coimbatore, India, 19–20 January 2018. [Google Scholar]
- Statue–Serious Accident Punishment Act. Available online: https://www.law.go.kr/%EB%B2%95%EB%A0%B9/%EC%A4%91%EB%8C%80%EC%9E%AC%ED%95%B4%EC%B2%98%EB%B2%8C%EB%93%B1%EC%97%90%EA%B4%80%ED%95%9C%EB%B2%95%EB%A5%A0 (accessed on 11 May 2023).
- Kang, S.; Kim, M.; Kim, K. Safety Monitoring for Human Robot Collaborative Workspaces. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 15–18 October 2019. [Google Scholar]
- Wang, S.; Yu, S.; Wang, H.; Wu, D.; Zhou, W.; Luo, H. Research and Design of Human Behavior Recognition Method in Industrial Production Based on Depth Image. In Proceedings of the 2022 4th International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 24–27 August 2022; pp. 1–6. [Google Scholar]
- Bokrantz, J.; Skoogh, A.; Ylipää, T.; Stahre, J. Handling of Production Disturbances in the Manufacturing Industry. J. Manuf. Technol. Manag. 2016, 27, 1054–1075, ISSN: 1741-038X. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Su, Q.; Shen, L. A Novel of Analyzing Quality Defect Due to Human Error in Engine Assembly Line. In Proceedings of the 2012 International conference on International Management, Innovation Management and Industrial Engineering, Sanya, China, 20–21 October 2012. [Google Scholar]
- Addanke, S.; Krishna, M.V.; Pradeep, K.V.; Jayant, K.P.; Ilyassova, K.; Sainath, K.L. Machine Learning on the Role of Eliminating Human Error on the Manufacturing Industry. In Proceedings of the 2022 6th International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 28–30 April 2022. [Google Scholar]
- Kaiming, H.; Georgi, G.; Piotr, D.; Ross, G. Mask r-cnn. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Shetye, S.; Shetty, S.; Shinde, S.; Madhu, C.; Mathur, A. Computer Vision for Industrial Safety and Productivity. In Proceedings of the 2023 International Conference on Communication System, Computing and IT Applications (CSCITA), Mumbai, India, 31 March 2023; pp. 117–120. [Google Scholar]
- Fan, S.; Zhang, L.; Wang, J.; Wang, Y.F.; Zhang, Q.S.; Zhao, H.; Fault, V.-B. Classification for Monitoring Industrial Robot. In Proceedings of the 2018 37th Chinese Control Conference, CCC, Wuhan, China, 25–27 July 2018. [Google Scholar]
- Wenjuan, G.; Xuena, Z.; Jordy, G.; Andrews, S.; Thierry, B.; Changhe, T.; El-Hadi, Z. Human Pose Estimation from Monocular Images: A Comprehensive Survey. Sensors 2016, 16, 1966. [Google Scholar]
- Rijayanti, R.; Hwang, M.; Jin, K.H. Extraction of Worker Behavior at the Manufacturing Site Using Mask R-CNN and Dense-Net. In Proceedings of the KIICE Spring Conference, Busan, Republic of Korea, 26–28 May 2022. [Google Scholar]
- Rijayanti, R.; Hwang, M.; Jin, K.H. Worker behavior Identification from Manufacturing Site Images using Mask R-CNN and MediaPipe. Korean Inst. Inf. Commun. Eng. 2023, 27, 281–290. [Google Scholar]
- Deep, S.; Tian, Y.; Lu, J.; Zhou, Y.; Zheng, X. Leveraging Multi-view Learning for Human Anomaly Detection in Industrial Internet of Things. In Proceedings of the Physical and Social Computing, Rhodes, Greece, 2–6 November 2020; pp. 533–537. [Google Scholar]
- Lindemann, B.; Jazdi, N.; Weyrich, M. Anomaly Detection and Prediction in Discrete Manufacturing Based on Cooperative LSTM Networks. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (Case), Hong Kong, China, 20–21 August 2020; pp. 1003–1010. [Google Scholar]
- Kamoona, A.M.; Gostar, A.K.; Tennakoon, R.; Bab-Hadiashar, A.; Accadia, D.; Thorpe, J.; Hoseinnezhad, R. Random Finite Set-Based Anomaly Detection for Safety Monitoring in Construction Sites. IEEE Access 2019, 7, 105710–105720. [Google Scholar] [CrossRef]
- Baydargil, H.B.; Park, J.; Ince, I.F. Unsupervised Anomaly Approach to Pedestrian Age Classification from Surveillance Cameras Using an Adversarial Model with Skip-Connections. Appl. Sci. 2021, 11, 9904. [Google Scholar] [CrossRef]
- Bouindour, S.; Snoussi, H.; Hittawe, M.M.; Tazi, N.; Wang, T. An On-Line and Adaptive Method for Detecting Abnormal Events in Videos Using Spatio-Temporal ConvNet. Appl. Sci. 2019, 9, 757. [Google Scholar] [CrossRef] [Green Version]
- Parvin, P.; Paternò, F.; Chessa, S. Anomaly Detection in the Elderly Daily Behavior. In Proceedings of the 2018 14th International Conference on Intelligent Environments (IE), Rome, Italy, 5–28 June 2018; pp. 103–106. [Google Scholar]
- Esan, D.O.; Owolawi, P.A.; Tu, C. Detection of Anomalous Behavioral Patterns in University Environment Using CNN-LSTM. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020; pp. 1–8. [Google Scholar]
- Hittawe, M.M.; Afzal, S.; Jamil, T.; Snoussi, H.; Hoteit, I.; Knio, O. Abnormal events detection using deep neural networks: Application to extreme sea surface temperature detection in the Red Sea. J. Electron. Imaging 2019, 28, 0210121–0210128. [Google Scholar] [CrossRef] [Green Version]
- Hittawe, M.M.; Langodan, S.; Beya, O.; Hoteit, I.; Knio, O. Efficient SST prediction in the Red Sea using hybrid deep learning-based approach. In Proceedings of the 2022 IEEE 20th International Conference on Industrial Informatics (INDIN), Perth, Australia, 25–28 July 2022; pp. 107–117. [Google Scholar]
- Jebur, S.A.; Hussein, K.A.; Hoomod, H.K.; Alzubaidi, L.; Santamaría, J. Review on Deep Learning Approaches for Anomaly Event Detection in Video Surveillance. Electronics 2023, 12, 29. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameter | Values |
|---|---|
| Hidden layer and number of neurons (Three LSTM layers and three dense layers) | LSTM 128, LSTM 64, LSTM 64, Dense 64, Dense 32, Dense 32 |
| Activation function input and hidden layer | Relu |
| Activation function output | Softmax |
| Dropout | No |
| Regularization | No |
| Optimizer | Adam |
| Bach size | 32 |
| Number of epochs | 100 |
| Detection | Accuracy (1000 Dataset) | Accuracy (12,000 Dataset) | Precision (1000 Dataset) | Precision (12,000 Dataset) | Recall (1000 Dataset) | Recall (12,000 Dataset) |
|---|---|---|---|---|---|---|
| Worker | 0.98 | 0.99 | 0.9830 | 0.9912 | 0.9734 | 0.9817 |
| Machine | 0.96 | 0.97 | 0.9719 | 0.9732 | 0.9617 | 0.9751 |
| Control box | 0.95 | 0.96 | 0.9464 | 0.9621 | 0.9470 | 0.9587 |
| Toolbox | 0.98 | 0.98 | 0.9851 | 0.9878 | 0.9722 | 0.9772 |
| Tool | 0.94 | 0.95 | 0.9472 | 0.9553 | 0.9419 | 0.9454 |
| Product | 0.93 | 0.94 | 0.9353 | 0.9425 | 0.9221 | 0.9533 |
| Pose Label | Accuracy (21 Videos) | Accuracy (31 Videos) | Precision (21 Videos) | Precision (31 Videos) | Recall (21 Videos) | Recall (31 Videos) |
|---|---|---|---|---|---|---|
| Standing | 0.95 | 0.96 | 0.9530 | 0.9646 | 0.9534 | 0.9644 |
| Walking | 0.94 | 0.95 | 0.9319 | 0.9534 | 0.9257 | 0.9512 |
| Touching | 0.95 | 0.96 | 0.9564 | 0.9581 | 0.9582 | 0.9634 |
| Holding | 0.95 | 0.96 | 0.9551 | 0.9614 | 0.9522 | 0.9548 |
| Bending | 0.94 | 0.94 | 0.9472 | 0.9495 | 0.9417 | 0.9432 |
| Sitting | 0.88 | 0.90 | 0.8751 | 0.8984 | 0.8619 | 0.9021 |
| Squatting | 0.89 | 0.90 | 0.8851 | 0.9058 | 0.8717 | 0.9049 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rijayanti, R.; Hwang, M.; Jin, K. Detection of Anomalous Behavior of Manufacturing Workers Using Deep Learning-Based Recognition of Human–Object Interaction. Appl. Sci. 2023, 13, 8584. https://doi.org/10.3390/app13158584
Rijayanti R, Hwang M, Jin K. Detection of Anomalous Behavior of Manufacturing Workers Using Deep Learning-Based Recognition of Human–Object Interaction. Applied Sciences. 2023; 13(15):8584. https://doi.org/10.3390/app13158584
Chicago/Turabian StyleRijayanti, Rita, Mintae Hwang, and Kyohong Jin. 2023. "Detection of Anomalous Behavior of Manufacturing Workers Using Deep Learning-Based Recognition of Human–Object Interaction" Applied Sciences 13, no. 15: 8584. https://doi.org/10.3390/app13158584