
SP-YOLOv8s: An Improved YOLOv8s Model for Remote Sensing Image Tiny Object Detection

Abstract
:1. Introduction
- -
- Using the SPD-Conv module, the benchmark network YOLOv8s enhances the complex background tiny object feature extraction capability. It can also effectively retain fine-grained feature information and improve network recognition accuracy;
- -
- The SPANet path aggregation network is used to enhance the fusion effect of different scale feature maps, reduce the model parameters, fully fuse the contextual information, and reinforce the stability of the network to complex backgrounds.
2. Related Work
3. Methodology
3.1. YOLOv8s
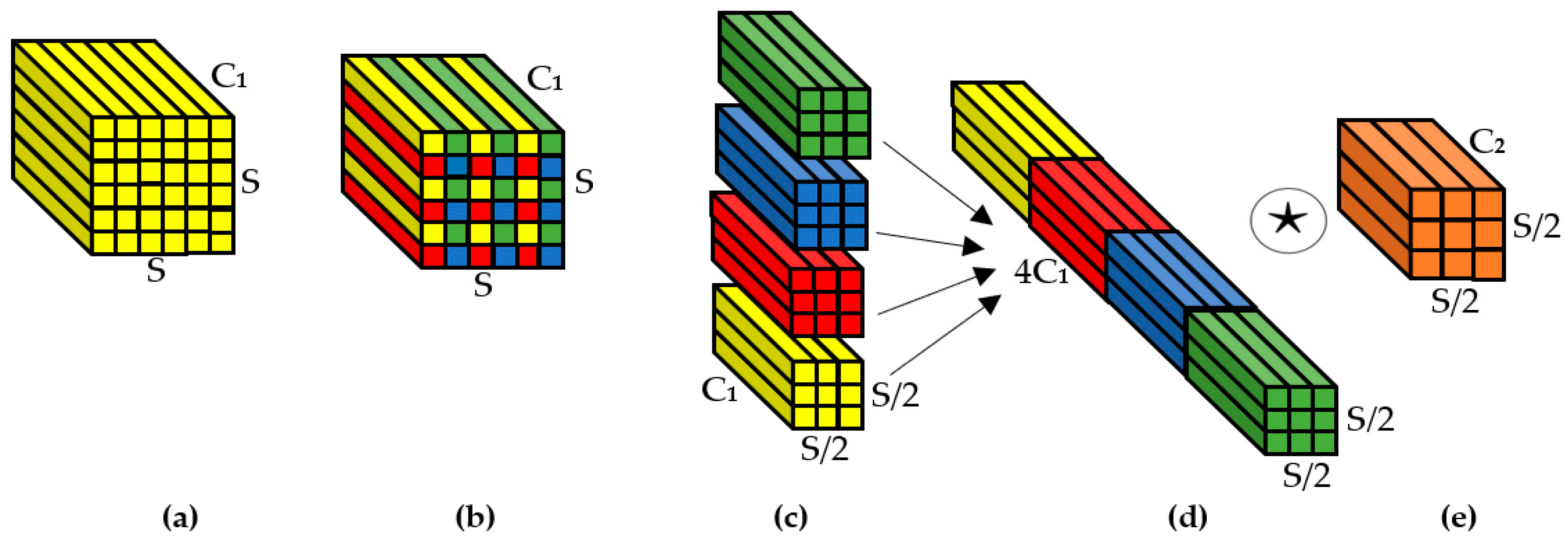
3.2. SPD-Conv Module
3.3. Path Aggregation Network SPANet
3.4. SP-YOLOv8s
- Image feature extraction using backbone network;
- Feature fusion using neck network;
- The feature maps of layers 23, 27, and 31 are input to the decoupling detection head.
4. Experimental Evaluation
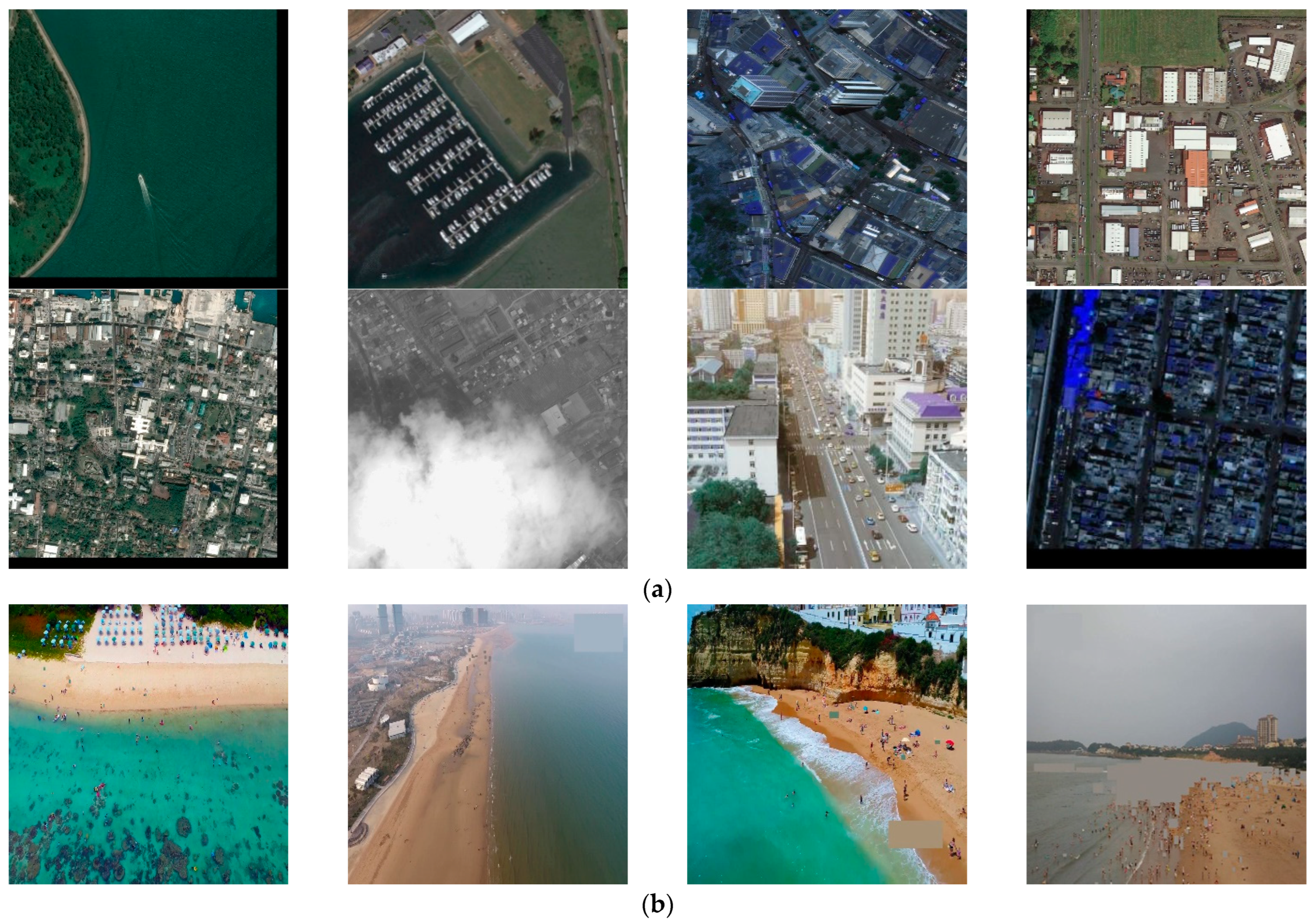
4.1. Experimental Environment and Datasets
4.2. Evaluation Indicators
4.3. Comparison with Other Methods
4.4. Ablation Experiments
4.5. Validation on Other Datasets
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z. A Study on Harbor Target Recognition in High Resolution Optical Remote Sensing Image; University of Science and Technology of China: Hefei, China, 2005. [Google Scholar]
- Li, W. Detection of Ship in Optical Remote Sensing Image of Median-Low Resolution; National University of Defense Science and Technology: Changsha, China, 2008. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Part V 13. pp. 740–755. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE computer society conference on computer vision and pattern recognition, CVPR 2001, Kauai, HI, USA, 8–14 December 2001. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Tong, X.-Y.; Xia, G.-S.; Lu, Q.; Shen, H.; Li, S.; You, S.; Zhang, L. Land-cover classification with high-resolution remote sensing images using transferable deep models. Remote Sens. Environ. 2020, 237, 111322. [Google Scholar] [CrossRef] [Green Version]
- Zhu, M.; He, Y.; He, Q. A review of researches on deep learning in remote sensing application. Int. J. Geosci. 2019, 10, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep learning-based crack damage detection using convolutional neural networks. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Xiao, Y.; Tian, Z.; Yu, J.; Zhang, Y.; Liu, S.; Du, S.; Lan, X. A review of object detection based on deep learning. Multimed. Tools Appl. 2020, 79, 23729–23791. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 24–27 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Washington, DC, USA, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; Volume 28. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Part I 14. pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 24–30 June 2016; pp. 779–788. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Zhou, X.; Wang, D.; Krähenbühl, P. Objects as points. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Fang, Z.; Cao, Z.; Xiao, Y.; Gong, K.; Yuan, J. MAT: Multianchor visual tracking with selective Search region. IEEE Trans. Cybern. 2020, 52, 7136–7150. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Jiao, L.; Xie, C.; Chen, P.; Du, J.; Li, R. S-RPN: Sampling-balanced region proposal network for small crop pest detection. Comput. Electron. Agric. 2021, 187, 106290. [Google Scholar] [CrossRef]
- Wang, J.; Yang, W.; Guo, H.; Zhang, R.; Xia, G.-S. Tiny object detection in aerial images. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 3791–3798. [Google Scholar]
- Wang, J.; Xu, C.; Yang, W.; Yu, L. A normalized Gaussian Wasserstein distance for tiny object detection. arXiv 2021, arXiv:2110.13389. [Google Scholar]
- Liu, S.; Huang, D.; Wang, Y. Learning spatial fusion for single-shot object detection. arXiv 2019, arXiv:1911.09516. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8759–8768. [Google Scholar]
- Shuai, T.; Sun, K.; Shi, B.; Chen, J. A ship target automatic recognition method for sub-meter remote sensing images. In Proceedings of the 2016 4th International Workshop on Earth Observation and Remote Sensing Applications (EORSA), Guangzhou, China, 4–6 July 2016; pp. 153–156. [Google Scholar]
- Cheng, G.; Han, J.; Guo, L.; Qian, X.; Zhou, P.; Yao, X.; Hu, X. Object detection in remote sensing imagery using a discriminatively trained mixture model. ISPRS J. Photogramm. Remote Sens. 2013, 85, 32–43. [Google Scholar] [CrossRef]
- Yang, X.; Yang, J.; Yan, J.; Zhang, Y.; Zhang, T.; Guo, Z.; Sun, X.; Fu, K. Scrdet: Towards more robust detection for small, cluttered and rotated objects. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8232–8241. [Google Scholar]
- Yang, X.; Yan, J.; Liao, W.; Yang, X.; Tang, J.; He, T. Scrdet++: Detecting small, cluttered and rotated objects via instance-level feature denoising and rotation loss smoothing. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 2384–2399. [Google Scholar] [CrossRef]
- Ding, J.; Xue, N.; Long, Y.; Xia, G.-S.; Lu, Q. Learning roi transformer for oriented object detection in aerial images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 2849–2858. [Google Scholar]
- Guan, H.; Yu, Y.; Li, D.; Wang, H. RoadCapsFPN: Capsule feature pyramid network for road extraction from VHR optical remote sensing imagery. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11041–11051. [Google Scholar] [CrossRef]
- Zhang, C.; Lam, K.-M.; Wang, Q. CoF-Net: A Progressive Coarse-to-Fine Framework for Object Detection in Remote-Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5600617. [Google Scholar] [CrossRef]
- Deng, L.; Bi, L.; Li, H.; Chen, H.; Duan, X.; Lou, H.; Zhang, H.; Bi, J.; Liu, H. Lightweight aerial image object detection algorithm based on improved YOLOv5s. Sci. Rep. 2023, 13, 7817. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Sun, M.; Cao, Y.; He, K.; Zhang, B.; Cao, Z.; Wang, M. Lightweight Network-Based Surface Defect Detection Method for Steel Plates. Sustainability 2023, 15, 3733. [Google Scholar] [CrossRef]
- Anitha, A.; Shivakumara, P.; Jain, S.; Agarwal, V. Convolution Neural Network and Auto-encoder Hybrid Scheme for Automatic Colorization of Grayscale Images. In Smart Computer Vision; Springer: Berlin/Heidelberg, Germany, 2023; pp. 253–271. [Google Scholar]
- Chen, S.; Cheng, T.; Fang, J.; Zhang, Q.; Li, Y.; Liu, W.; Wang, X. TinyDet: Accurate Small Object Detection in Lightweight Generic Detectors. arXiv 2023, arXiv:2304.0342. [Google Scholar]
- Yang, X.; Sun, H.; Sun, X.; Yan, M.; Guo, Z.; Fu, K. Position detection and direction prediction for arbitrary-oriented ships via multitask rotation region convolutional neural network. IEEE Access 2018, 6, 50839–50849. [Google Scholar] [CrossRef]
- Van Etten, A. You only look twice: Rapid multi-scale object detection in satellite imagery. arXiv 2018, arXiv:1805.09512. [Google Scholar]
- Chen, S.; Zhan, R.; Zhang, J. Geospatial object detection in remote sensing imagery based on multiscale single-shot detector with activated semantics. Remote Sens. 2018, 10, 820. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Sun, X.; Diao, W.; Fu, K. FMSSD: Feature-merged single-shot detection for multiscale objects in large-scale remote sensing imagery. IEEE Trans. Geosci. Remote Sens. 2019, 58, 3377–3390. [Google Scholar] [CrossRef]
- Li, M.; Guo, W.; Zhang, Z.; Yu, W.; Zhang, T. Rotated region based fully convolutional network for ship detection. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 673–676. [Google Scholar]
- Fu, Y.; Wu, F.; Zhao, J. Context-aware and depthwise-based detection on orbit for remote sensing image. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 1725–1730. [Google Scholar]
- Zhang, W.; Wang, S.; Thachan, S.; Chen, J.; Qian, Y. Deconv R-CNN for small object detection on remote sensing images. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 2483–2486. [Google Scholar]
- Schilling, H.; Bulatov, D.; Niessner, R.; Middelmann, W.; Soergel, U. Detection of vehicles in multisensor data via multibranch convolutional neural networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4299–4316. [Google Scholar] [CrossRef]
- Liu, W.; Ma, L.; Wang, J. Detection of multiclass objects in optical remote sensing images. IEEE Geosci. Remote Sens. Lett. 2018, 16, 791–795. [Google Scholar] [CrossRef]
- Ying, X.; Wang, Q.; Li, X.; Yu, M.; Jiang, H.; Gao, J.; Liu, Z.; Yu, R. Multi-attention object detection model in remote sensing images based on multi-scale. IEEE Access 2019, 7, 94508–94519. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Klambauer, G.; Unterthiner, T.; Mayr, A.; Hochreiter, S. Self-normalizing neural networks. In Proceedings of the 31stConferenceonNeuralInformationProcessingSystems(NIPS2017), LongBeach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.-Y.; Liao, H.-Y.M.; Yeh, I.-H. Designing Network Design Strategies Through Gradient Path Analysis. arXiv 2022, arXiv:2211.04800. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Cao, Y.; Chen, K.; Loy, C.C.; Lin, D. Prime sample attention in object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11583–11591. [Google Scholar]
- Sunkara, R.; Luo, T. No more strided convolutions or pooling: A new CNN building block for low-resolution images and small objects. In Proceedings of the Machine Learning and Knowledge Discovery in Databases: European Conference, ECML PKDD 2022, Grenoble, France, 19–23 September 2022; Part III. pp. 443–459. [Google Scholar]
- Yu, X.; Gong, Y.; Jiang, N.; Ye, Q.; Han, Z. Scale match for tiny person detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Snowmass Village, CO, USA, 1–5 March 2020; pp. 1257–1265. [Google Scholar]
- Xia, G.-S.; Bai, X.; Ding, J.; Zhu, Z.; Belongie, S.; Luo, J.; Datcu, M.; Pelillo, M.; Zhang, L. DOTA: A large-scale dataset for object detection in aerial images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 3974–3983. [Google Scholar]
- Li, K.; Wan, G.; Cheng, G.; Meng, L.; Han, J. Object detection in optical remote sensing images: A survey and a new benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 159, 296–307. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Zhang, S.; Chi, C.; Yao, Y.; Lei, Z.; Li, S.Z. Bridging the gap between anchor-based and anchor-free detection via adaptive training sample selection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 9759–9768. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6154–6162. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | mAP0.5/% | mAP0.5:0.95/% | FPS | Model Size/MB |
|---|---|---|---|---|
| Faster R-CNN [13] | 26.3 | 11.1 | 16 | 236.33 |
| ATSS [56] | 30.6 | 12.8 | 2 | 244.56 |
| Cascade R-CNN [57] | 30.8 | 13.8 | 1 | 319.45 |
| YOLOv3-spp [55] | 41.1 | 18.6 | 74 | 29.97 |
| YOLOv5s | 42.2 | 18.6 | 102 | 17.67 |
| YOLOv8s | 43.4 | 19.3 | 94 | 21.48 |
| Literature [21] | 49.3 | 20.8 | 8 | 942.92 |
| Proposed algorithm | 48.3 | 22.7 | 37 | 19.95 |
| Method | mAP0.5/% | mAP0.5:0.95/% | FPS | Model Size/MB | GFLOPs |
|---|---|---|---|---|---|
| YOLOv8s | 43.4 | 19.3 | 94 | 21.48 | 28.5 |
| YOLOv8s + SPANet | 45.9 | 21.0 | 47 | 17.49 | 62.9 |
| YOLOv8s + SPD-Conv | 46.1 | 20.9 | 63 | 24.41 | 45.8 |
| YOLOv8s + SPD + SPANet | 48.3 | 22.7 | 37 | 19.95 | 86.5 |
| Method | mAP0.5/% | mAP0.5:0.95/% | FPS | Model Size/MB | GFLOPs |
|---|---|---|---|---|---|
| YOLOv3-spp [55] | 26.3 | 8.91 | 40 | 29.95 | 44.0 |
| YOLOv5s | 25.4 | 8.60 | 35 | 17.65 | 23.8 |
| YOLOv7-tiny [58] | 13.2 | 3.18 | 128 | 11.70 | 0.9 |
| YOLOv8s | 25.4 | 8.60 | 40 | 21.46 | 28.4 |
| Proposed method | 34.5 | 11.8 | 27 | 19.88 | 86.4 |
| Class | Precision/% | Recall/% | mAP0.5/% | mAP0.5:0.95/% |
|---|---|---|---|---|
| Earth_person | 48.4 | 32.7 | 33.7 | 12.1 |
| Sea_person | 49.6 | 38.1 | 35.3 | 11.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, M.; Pang, H. SP-YOLOv8s: An Improved YOLOv8s Model for Remote Sensing Image Tiny Object Detection. Appl. Sci. 2023, 13, 8161. https://doi.org/10.3390/app13148161
Ma M, Pang H. SP-YOLOv8s: An Improved YOLOv8s Model for Remote Sensing Image Tiny Object Detection. Applied Sciences. 2023; 13(14):8161. https://doi.org/10.3390/app13148161
Chicago/Turabian StyleMa, Mingyang, and Huanli Pang. 2023. "SP-YOLOv8s: An Improved YOLOv8s Model for Remote Sensing Image Tiny Object Detection" Applied Sciences 13, no. 14: 8161. https://doi.org/10.3390/app13148161