1. Introduction
Since Pecora and Carroll realized synchronization between two chaotic systems in 1990 [
1,
2], chaos synchronization has been widely explored and studied due to its potential applications in vast areas of physics and engineering science [
3,
4,
5,
6]. Synchronization is a process wherein two or more systems adjust a given property of their motion. Different types of synchronization phenomena have been numerically observed and experimentally verified in a variety of chaotic systems, such as complete synchronization [
1,
7], phase synchronization [
8,
9], anti-phase synchronization [
10,
11], lag synchronization [
12,
13], generalized synchronization [
14,
15] and projective synchronization [
16,
17].
Complete synchronization (CS) is characterized by a coincidence of states of two chaotic systems while evolving in time. CS only appears when two interacting systems are identical. However, it is difficult to construct two absolutely identical systems in the real world. Generalized synchronization (GS) refers to a functional relation of states of two different chaotic systems, which is an extension of CS. Projective synchronization (PS) is more complex than CS but simpler than GS. Additionally, PS is useful in extending binary digital to M-nary digital communication to achieve faster communication [
18,
19,
20].
PS was first reported by Mainieri et al. [
16] in a class of systems with partial linearity in which the drive and response vectors evolve in a proportional scale. Xu [
21] showed that the scaling factor of PS in coupled partially linear systems is unpredictable and can be arbitrarily maneuvered by introducing a feedback control to master systems. The PS between two chaotic discrete dynamical systems was achieved by Xin and Wu [
22] via linear state error feedback control. Wen and Xu [
23] and Yan and Li [
24] extended the projective synchronization feature to general nonlinear systems, including non-partially linear chaotic systems, by applying controllers to response systems, which is called generalized projective synchronization (GPS) and was studied later [
25,
26,
27]. CS and anti-synchronization are particular cases of GPS. As an extension of GPS, modified projective synchronization (MPS) was introduced by Li et al. [
28] and He et al. [
29], where the responses of synchronized dynamical states can be synchronized up to a constant matrix. The combined projective synchronization (CPS) among different nonlinear systems has been reported by Feng et al. [
30] by means of the active backstepping design method. Chen et al. [
31,
32] considered two chaotic systems synchronized up to a scaling function factor, which is called function projective synchronization (FPS). The FPS between two novel chaotic systems has been investigated by El Dessoky et al. [
33] and Bekiros et al. [
34] using the Lyapunov method of stability. Du et al. [
35] and Srisuntorn et al. [
36] discussed modified function projective synchronization (MFPS), in which two chaotic systems can be synchronized up to a desired scaling function matrix. As another extension of MPS and FPS, in generalized function projective synchronization (GFPS), the scaling function matrix is more generalized than that of MFPS, as has been discussed by Yu and Li [
37], Li and Zhao [
38], Wu et al. [
39] and Al-Azzawi [
40].
Most of the previous works have focused on the constant scaling factor and mainly on chaotic systems with exactly known parameters. However, in many practical situations, GFPS needs to be investigated while some parameters are uncertain. It is easy to understand that GFPS may be greatly affected by these uncertainties. Yu and Li [
37] designed an adaptive controller to achieve GFPS between two different chaotic systems and gain some parameter update laws to estimate the unknown parameters of chaotic systems. Li and Zhao [
38] firstly discussed the GFPS conditions of two different uncertain hyperchaotic systems when the scaling function factors were periodic functions and polynomial functions. However, only a few theoretical results about GFPS between two different uncertain chaotic systems have been obtained [
41,
42,
43,
44,
45]. Furthermore, the aforementioned controllers all are designed through the construction of proper Lyapunov functions. The added controllers therefore are often very specific and may be too difficult to realize physically.
In this paper, an effective approach is proposed to design an adaptive controller to realize GFPS between two different uncertain chaotic systems. Moreover, the unknown parameters in the coupled system can be estimated by given parameter update laws. The key to realizing GFPS between two chaotic systems is the determination of the stability of the synchronization error system. In previous works, this problem usually was solved by using the Lyapunov method. However, there are two main difficulties in this method: the first one is that it is challenging to construct a proper Lyapunov function; the second is that the GFPS conditions derived using the Lyapunov method are usually sufficient and highly conserved. The controllers and parameter update laws designed based on such conditions are often very specific. In fact, GFPS can be viewed as a unique case of GS, which can be investigated using the auxiliary system approach [
46]. To avoid the construction of Lyapunov functions, the approach presented in this paper converts the differential equations describing the synchronization error system between the auxiliary system and the response system into a series of Volterra integral equations by using the Laplace transform method. Then, the dynamical behavior of the error system near its origin can be analyzed by employing the successive approximation method [
47]. In the theory of integral equations, the significance of the Laplace transform method is that the GFPS condition can be obtained without the construction of Lyapunov functions, even if the scaling function factors are periodic functions, polynomial functions or any other complex functions. Compared to previous works, our approach allows the easier design of controllers and simpler parameter update laws and removes some restrictions on the uncertain parameters. The feasibility and effectiveness of the approach are illustrated by several numerical simulations.
The rest of the paper is organized as follows. In
Section 2, the GFPS scheme for two different uncertain chaotic systems is introduced. In
Section 3, the GFPS condition is investigated using the Laplace transform method combined with the successive approximation method in the theory of Volterra integral equations. A numerical example is provided in
Section 4 to demonstrate the effectiveness of our GFPS scheme. In
Section 5, simple parameter update laws are designed according to the GFPS condition derived in
Section 3 to estimate the uncertain parameters in chaotic systems, the validity of which are illustrated by numerical simulations. Finally, conclusions are drawn in
Section 6.
2. GFPS Scheme between Two Different Uncertain Chaotic Systems
Consider two chaotic systems (drive–response systems) with uncertain parameters given in the following form:
where
;
are uncertain parameter vectors, and
u is the controller to be designed. For simplicity, assume that
hold for any values of
and
. If there exists a scaling function matrix
, such that
then the two chaotic systems in system (
1) are said to be GFPS with respect to the scaling function matrix
h [
37,
40]. The two chaotic systems are said to be FPS if
in Equation (
2). Moreover, we find MPS between the two chaotic systems if
(
) are real constants in Equation (
2). Obviously, both FPS and MPS are specific cases of GFPS.
The controller
u and the parameter update laws in system (
1) are designed as below:
where
,
k is the control parameter, and
is the synchronization error;
and
are the estimated values of uncertain parameter vectors
and
, respectively. In addition,
hold if
The GFPS occurring in system (
1) can be regarded as a specific case of GS between the two chaotic systems, which can be detected using the auxiliary system approach [
46]. Consider the following identical copy of the response system driven by the same driving signal
x,
in which
and
.
and
are the estimated values of uncertain parameter vectors
and
, respectively. Additionally,
hold for
Then, GFPS conditions (
2) and (
4) lead to
3. Detection of GFPS Condition Based on the Laplace Transform
By letting
systems (
1), (
3) and (
5) become
GFPS condition (
7) can be written as
For sufficiently small
near
, the right-hand side of the first three equations in system (
8) can be expanded as
where
Consider the Laplace transform, defined as follows:
Both
and
are vectors with the same dimensions for
. Taking the Laplace transform of
on both sides of system (
10) yields
where
,
,
represent the
,
and
real identity matrices, respectively.
T denotes the transpose of vectors.
,
, are given initial values of system (
10) and
are the Laplace transforms of
, respectively, i.e.,
The solution to Equation (
12) can be derived by using Cramer’s rule [
48]. Take, for example, the expression of
, which is an
n-dimensional vector and always can be given by the form below:
where
and
are the
n components of the vectors
and
, respectively.
is the determinant of matrix
.
,
, are polynomials of
s, and their highest powers are less than that of
. Taking the inverse Laplace transform on Equation (
14) and applying the convolution theorem, one has
where
and
are the
n components of the vectors
and
, respectively. ∗ denotes the convolution operation. First, we introduce the following theorem.
Theorem 1. The necessary condition for with , , in Equation (15) is that all eigenvalues of matrix M defined in Equation (13) have negative real parts. Proof. Without loss of generality, for any
and
,
have the following form
where
,
and
are constants. Consider the following three cases of the inverse Laplace transforms for Equation (
16):
has single roots
,
where , .
has a pair of conjugate complex roots
,
where , ,
has -repeated real roots
,
where , ,
,
From the analysis of the inverse Laplace transform of Equation (
16), it is clear that the inverse Laplace transform of
,
, in Equation (
15) must be a sum of exponential functions. When
, all roots of
must have negative real parts if
□
Assume that matrix
M only has eigenvalues with negative real parts; from Equation (
15), when
,
can be written in the following form:
where
One can easily confirm that the condition that matrix
M only has eigenvalues with negative real parts also is necessary for
,
and
,
. Similarly, under such conditions, when
,
and
have the following form:
in which
for
,
.
and
are the
m and
l components of the vectors
and
, respectively, which are defined in Equation (
10).
Theorem 2. , , , , , , are the unique continuous solutions of Equations (17) and (18). Proof. In fact, Equations (
17) and (
18) are a series of Volterra integral equations, which can be solved by using the successive approximation method [
47] in the theory of integral equations. Consider the Volterra integral equation as below:
where
and
,
is a
matrix, and
for any
. Both
and
are vectors with
n continuous components. Furthermore, for any
, there must exist a constant
such that
From the results given by Nohel [
47], if the above conditions are satisfied, the successive approximations
will uniformly converge to the unique continuous solution
of Equation (
19).
Comparing Equations (
17)–(
19), it is easy to check that
, which are defined in Equation (
10), are smooth enough to satisfy condition (
20). From Equation (
21),
,
,
,
,
,
, are the unique continuous solutions of Equations (
17) and (
18). □
According to Theorems 1 and 2, we have the following result.
Theorem 3. GFPS in systems (1) and (3) can be achieved if the matrix M defined in Equation (13) only has eigenvalues with negative real parts. □
4. Discussion of GFPS Scheme
To illustrate the effectiveness of the GFPS scheme proposed in the previous sections on the basis of the Laplace transform method, the following chaotic systems with uncertain parameters, which have been considered in [
37,
38], are discussed:
where
are the state vectors;
,
,
and
represent the vectors of uncertain parameters; and
is a controller. For simplicity,
hold for any values of
and
. Define the error vector of GFPS as
where
,
are scaling function factors that compose the scaling function matrix
. According to [
38], GFPS in (
22) can be achieved by the controller and the parameter update laws as follows:
where
,
and
are estimated values of the uncertain parameters in Equation (
22);
K is a
matrix, which can be decomposed into
, in which
and
satisfy the following assumptions:
From the first condition in condition (
24), all real parts of the eigenvalues of
are zero since it is a real antisymmetric matrix. Then, all eigenvalues of matrix
K (
) must have negative real parts if condition (
24) is satisfied.
From Theorem 3 in
Section 3, GFPS in system (
22) appears due to the controller and parameter update laws presented in Equation (
23) if all eigenvalues of the matrix
have negative real parts, in which
and
are the
and
real identity matrices, respectively. Obviously, the above GFPS condition implies that all eigenvalues of matrix
K should have negative real parts.
Remark 1. The GFPS condition derived in [38] is a special condition of Theorem 3 in Section 3. An example is given below to demonstrate that the condition (
24) is not necessary for GFPS occurring in system (
22) under the controller and parameter update laws in (
23). Consider the hyperchaotic Chen system and hyperchaotic Lorenz system as the drive and response systems, respectively [
38].
and
where
and
are uncertain parameters to be identified. The true values of the uncertain parameters of systems (
26) and (
27) are chosen as
,
,
,
,
,
,
,
and
. In addition, we choose the scaling function matrix as
, where
Then, one can find that
, where
According to the theoretical analysis, the controller and parameter update laws presented in (
23) have the following form:
where
(
) are real constants that compose the matrix
K;
,
;
,
,
,
,
,
,
,
and
are estimated values of the unknown parameters in systems (
26) and (
27). From the analytical result given in [
38], GFPS between systems (
26) and (
27) will be achieved if the
K matrix is chosen as
which satisfies condition (
24). However, the GFPS conditions obtained in this paper for systems (
26) and (
27) only require that all eigenvalues of
K matrix have negative real parts. Numerical simulations for systems (
26), (
27) are carried out below by selecting
Remark 2. The K matrix (34) is not antisymmetric, which does not satisfy the first condition in (24). The four eigenvalues of
K matrix (
34) are
and
. The numerical results are shown in
Figure 1 and
Figure 2, in which the initial values of the systems (
26) and (
27) are taken as
,
,
,
,
,
,
,
and the estimated parameters have initial conditions
,
,
,
,
,
,
,
and
. Although
K matrix (
34) does not satisfy condition (
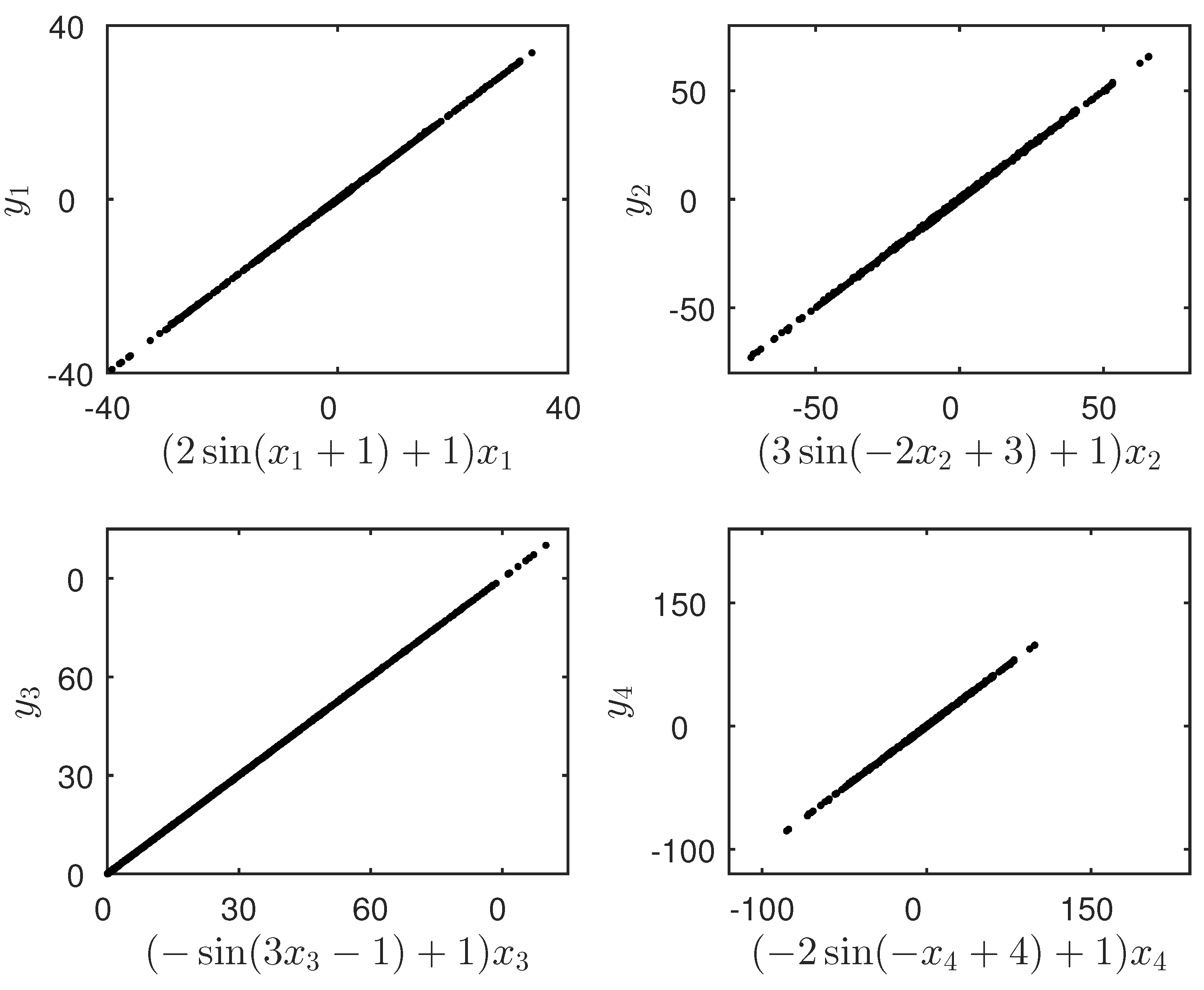
24),
Figure 1 shows that GFPS between systems (
26) and (
27) is achieved with the scaling function factors (
28).
Figure 2 illustrates that the estimated parameters
,
,
,
,
,
,
,
,
in systems (
26) and (
27) adapt themselves to the true values
,
,
,
,
,
,
,
and
, respectively. The numerical results in
Figure 1 and
Figure 2 demonstrate that GFPS between systems (
26) and (
27) can be achieved with the scaling function factors (
28) and matrix (
34), and the parameter estimate errors converge to zero.
Remark 3. The GFPS condition derived using the Laplace transform method is more generalized than that proposed in [38], which is obtained using the Lyapunov method. To further verify the theory’s parts in more detail, another
K matrix,
is chosen to perform the numerical simulations for systems (
26) and (
27) with scaling function factors (
28), in which all the initial conditions remain the same.
Remark 4. For matrix (35), neither of the two conditions in (24) is satisfied. Matrix (
35) has four eigenvalues with negative real parts,
,
, which satisfies the condition given in Theorem 1 in
Section 3. The numerical results are presented in
Figure 3 and
Figure 4.
Figure 3 illustrates that GFPS between systems (
26) and (
27) occurs with the scaling function factors (
28).
Figure 4 shows that the estimated parameters
,
,
,
,
,
,
,
,
in systems (
26) and (
27) also can converge to their true values
,
,
,
,
,
,
,
and
, respectively. The numerical results in
Figure 1,
Figure 2,
Figure 3 and
Figure 4 demonstrate that GFPS between systems (
26) and (
27) can be achieved with the scaling function factors (
28), and the parameter estimate errors converge to zero as long as all eigenvalues of
K matrix have negative real parts, which verifies the correctness of our theoretical results in Section
3.
5. The Design of Simple Parameter Update Laws
According to the GFPS condition given in Theorem 1 in
Section 3, simple parameter update laws can be designed for the estimation of the uncertain parameters in system (
1). From
M matrix defined in Equation (
13),
and
in Equation (
3) can be selected so that the eigenvalues of matrix
M are independent of
and
. Consider that
and
in Equation (
3) have the following form:
where
are control parameters;
are the functions of
,
. With parameter update laws (
36), matrix
M in Equation (
13) becomes
where
,
and
represent
,
and
real identity matrices, respectively. All eigenvalues of matrix (
37) have negative real parts as long as matrices
k,
and
have no eigenvalues with non-negative real parts. For the sake of simplicity, one can choose all
k,
and
to be scalars. Therefore, GFPS in system (
1) can be achieved by the controller and parameter update laws presented in Equations (
3) and (
36) if
.
To illustrate the effectiveness of the parameter update laws (
36), drive–response systems constructed with the Lorenz and Chen systems are selected to perform numerical simulations. The Lorenz chaotic system [
49], as the drive system, can be described by the following equations:
where
are state variables, and
are uncertain parameters to be identified. In particular, when
,
and
, system (
38) displays a chaotic attractor.
The Chen chaotic system [
50], as the response system, is given as below:
where
are state variables,
are uncertain parameters to be estimated and
are the control laws to be designed. System (
39) exhibits chaotic dynamics when
,
and
. The scaling function matrix between systems (
38) and (
39) is chosen as
, and one has
According to Equations (
3) and (
36), the controller
and the parameter update laws can be given by
where
and
are estimated values of the uncertain parameters in systems (
38) and (
39). The true values of the uncertain parameters of systems (
38) and (
39) are chosen as
,
,
and
,
,
. According to the previous analysis results in the section, if
are chosen as
and
, GFPS between uncertain Lorenz and Chen chaotic systems will be achieved under the control of the controller (
40), and the uncertain parameters will be estimated using the parameter update laws (
41) and (
42). The initial conditions are given by
,
,
,
,
,
,
,
,
,
,
and
to perform the numerical simulations. As shown in
Figure 5 and
Figure 6, GFPS between systems (
38) and (
39) is achieved, and the uncertain parameters are also identified.
If the scaling function matrix is taken as
and all other parameter conditions in systems (
38) and (
39) remain the same, GFPS between systems (
38) and (
39) still can be achieved and the uncertain parameters are also identified under the controller and parameter update laws given by Equations (
3) and (
36), respectively. The simulation results are shown in
Figure 7 and
Figure 8, which illustrate the validity of the parameter update laws (
36) proposed in the section. It is worth pointing out that the parameter update laws (
36) are still valid even if the scaling function factors are other complex functions.
6. Conclusions
In this paper, an adaptive controller is proposed to realize GFPS between two different chaotic systems (drive–response systems) with uncertain parameters based on the Laplace transform method. Compared to previous research, first, the uncertain chaotic systems considered in this paper are more generalized and have fewer restrictions on uncertain parameters; second, the GFPS scheme proposed in this paper is more generalized, and it can be used even when the scaling function factors are periodic functions, polynomial functions or other complex functions. Third, the parameter update laws designed for the estimation of uncertain parameters based on the GFPS condition derived using the Laplace transform method are simpler.
The greatest advantage of the GFPS scheme based on the Laplace transform method is that it can be used to design simple controllers and parameter update laws without constructing Lyapunov functions. The added controllers designed by this approach are more generalized and easier to realize physically than those designed through the Lyapunov function method.
It should be noted that we only consider the local stability of the origin in the GFPS error system between two chaotic systems in this paper. Moreover, to obtain the GFPS conditions, we require the smoothness of the trajectories in two chaotic systems to guarantee the existence, uniqueness and continuousness of solutions in a class of Volterra integral equations. According to the works in the literature [
51,
52], the global stability of the GFPS error system between two non-smooth chaotic systems is worthy of discussion, and this will be one of our next research points.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}